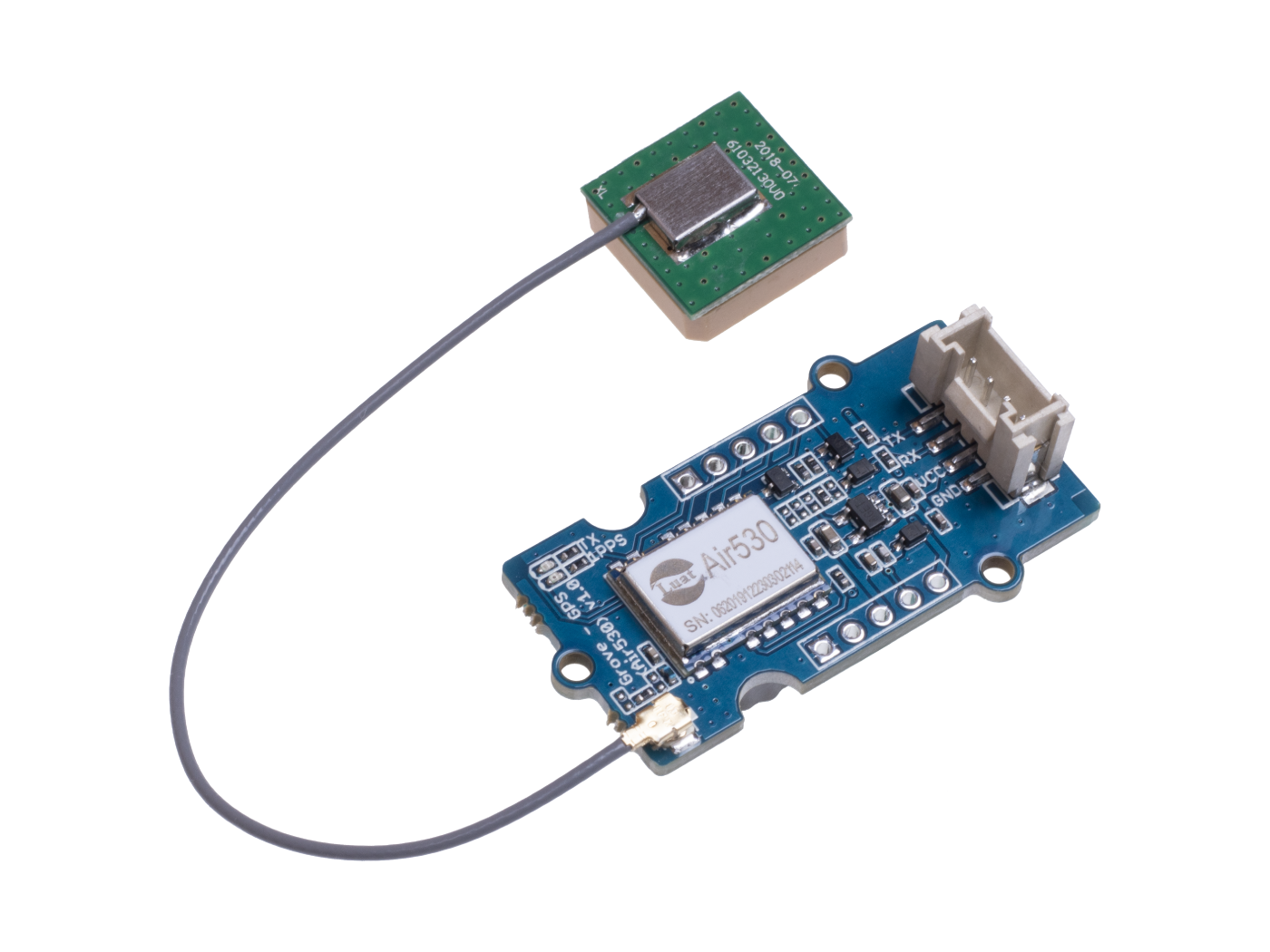
Grove - GPS (Air530)
都市部や少数の衛星モジュールのみでGPSがうまく動作しないことに困っていませんか?それなら、ぜひ新しいGrove-GPS (Air530)をお試しください。これは高性能で高度に統合されたマルチモード衛星位置決定およびナビゲーションモジュールです。GPS / Beidou / Glonass / Galileo / QZSS / SBASをサポートしており、車のナビゲーション、スマートウェア、ドローンなどのGNSS位置決定アプリケーションに適しています。

Seeed GPS Modules Selection Guideを公開しました。これにより、あなたのニーズに最適なGPSモジュールを選ぶ手助けができます。
特徴
- コストパフォーマンスに優れる
- 高度に統合されたマルチモード衛星位置決定およびナビゲーション
- 簡単に展開できるコンパクトサイズ
- 小型で低消費電力
Groveモジュールの詳細については、Grove Systemをご参照ください。
仕様
| パラメータ | 値 |
|---|---|
| 供給電圧 | 3.3V/5V |
| 動作電流 | 最大60mA |
| ウォームスタート時間 | 4秒 |
| コールドブート時間 | 30秒 |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応プラットフォームとして記載されているものは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することは不可能です。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoを初めて使用する場合は、開始する前にArduinoの使い方を必ずご覧ください。
Arduinoで遊ぶ
このサンプルは、ソフトウェアシリアルを使用してGPSからデータを読み取り、それをシリアルポートに送信する簡単な例です。
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Seeeduino V4.2 | Base Shield | Grove - GPS (Air530) |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 2. Grove - GPSをGrove-Base ShieldのD2ポートに接続します。
- ステップ 3. Grove - Base ShieldをSeeeduinoに差し込みます。
- ステップ 4. USBケーブルを使用してSeeeduinoをPCに接続します。

Grove Base Shieldがない場合は、以下のようにGrove - GPSをSeeeduinoに直接接続することもできます。
| Seeeduino | Grove - GPS |
|---|---|
| 5V | 赤 |
| GND | 黒 |
| D3 | 白 |
| D2 | 黄色 |
ソフトウェア
u-centerソフトウェアはWindows専用ですのでご注意ください。
- ステップ 1. u-centerソフトウェアをインストールします。
- ステップ 2. 以下のコードをArduino IDEにコピーしてアップロードします。コードのアップロード方法がわからない場合は、コードのアップロード方法をご確認ください。
#include <SoftwareSerial.h>
SoftwareSerial SoftSerial(2, 3);
unsigned char buffer[64]; // シリアルポート経由で受信するデータ用のバッファ配列
int count=0; // バッファ配列のカウンター
void setup()
{
SoftSerial.begin(9600); // SoftSerialのボーレート
Serial.begin(9600); // Arduinoのシリアルポートのボーレート
}
void loop()
{
if (SoftSerial.available()) // ソフトウェアシリアルポートからデータが来ている場合
{
while(SoftSerial.available()) // データを文字配列に読み込む
{
buffer[count++]=SoftSerial.read(); // 配列にデータを書き込む
if(count == 64)break;
}
Serial.write(buffer,count); // データ送信が終了していない場合、バッファをハードウェアシリアルポートに書き込む
clearBufferArray(); // clearBufferArray関数を呼び出して配列内のデータをクリアする
count = 0; // whileループのカウンターをゼロに設定
}
if (Serial.available()) // ハードウェアシリアルポートにデータがある場合(PCまたはノートブックからデータが来ている場合)
SoftSerial.write(Serial.read()); // SoftSerialシールドに書き込む
}
void clearBufferArray() // バッファ配列をクリアする関数
{
for (int i=0; i<count;i++)
{
buffer[i]=NULL;
} // 配列のすべてのインデックスをNULLでクリア
}
-
ステップ 3. U-centerを開きます。
-
ステップ 4. Receiver -> Portをクリックし、Arduinoが使用しているCOMポートを選択します。
-
ステップ 5. Receiver -> Baudrateをクリックし、9600が選択されていることを確認します。
-
ステップ 6. View -> Text Consoleをクリックすると、NMEAデータがストリームされるウィンドウが表示されます。
-
ステップ 7. シリアルモニターを開くと、以下のように表示されます:

Google Earthでデータを表示することもできます:
-
ステップ 1. File -> Database Export -> Google Earth KMLをクリックします。
-
ステップ 2. これにより、u-centerでキャプチャされた履歴がGoogle Earthで起動されます。
-
ステップ 3. または、ツールバーの赤い丸を押してデータを記録し、保存場所を指定することができます。
-
ステップ 4. 十分なデータをキャプチャしたら、黒い四角をクリックして記録を停止します。
-
ステップ 5. 生成された.ubxファイルをGPSVisualizerにアップロードしてKMLに変換すると、以下のように地図上に位置(赤いスポット)が表示されます:

テストは屋外で行うことをお勧めします。信号伝送の悪さによる位置の不正確さを避けるためです。
回路図オンラインビューア
リソース
- [ZIP] GPS 回路図 (PDF)
- [PDF] Air 530 ユーザーブックレット
プロジェクト
GPS/GPRS トラッカーのプロジェクト: この新しいプロジェクトでは、GPRS技術とMQTTプロトコルを使用して接続されたGPSトラッカーを紹介します。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しています。