Grove - I2C モータードライバー (L298P)

Grove - I2C モータードライバー (L298P) は、ステッピングモーターやサーボモーター用の汎用モータードライバーです。STM32 チップを内蔵しており、コードを焼き込んでモータードライバーを制御することができます。このモータードライバーは2チャンネル仕様で、各チャンネルは最大1Aの電流をサポートします。また、I2Cインターフェースを使用して周辺マイクロコントローラーからデータを送信することができます。デフォルトのI2Cアドレスは0x0fであり、I2Cワイヤーハットを接続することでモータードライバーのアドレスを変更することが可能です。I2Cアドレスは0x00から0x0fまで選択可能です。
特徴
- MCU: STM32f030f4P6 マイクロコントローラーを使用してコードを焼き込み、モータードライバーを制御。
- L298P モータードライバーチップ: 汎用モータードライバーで、ステッピングモーターやサーボモーターを駆動可能。
- 選択可能なI2Cアドレス: ワイヤーハットの接続を変更することで、I2Cアドレスを0x00から0x0fまで設定可能。デフォルトのI2Cアドレスは0x0f。
- 2チャンネル出力: 各チャンネルで最大1Aの電流をサポート、合計最大2Aの電流。6V-12VのDC電圧入力が必要。
- ユーザーLED: 各チャンネルで、時計回り方向は緑色LED、反時計回り方向は赤色LEDが点灯。
仕様
| 項目 | 値 |
|---|---|
| MCU | STM32f030f4P6 |
| 電源供給 | 6-12V DC |
| インターフェース | Grove I2C |
| I2Cアドレス | デフォルト 0x0f、ワイヤーハット接続で変更可能 |
| チャンネル | 2 |
| 出力電流 | 最大2A、各チャンネル1A |
| 出力電圧 | 5V |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
はじめに
Arduino プラットフォームを使用する
必要な材料
| Seeeduino V4.2 | Base Shield | Grove - I2C Motor Driver (L298P) |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
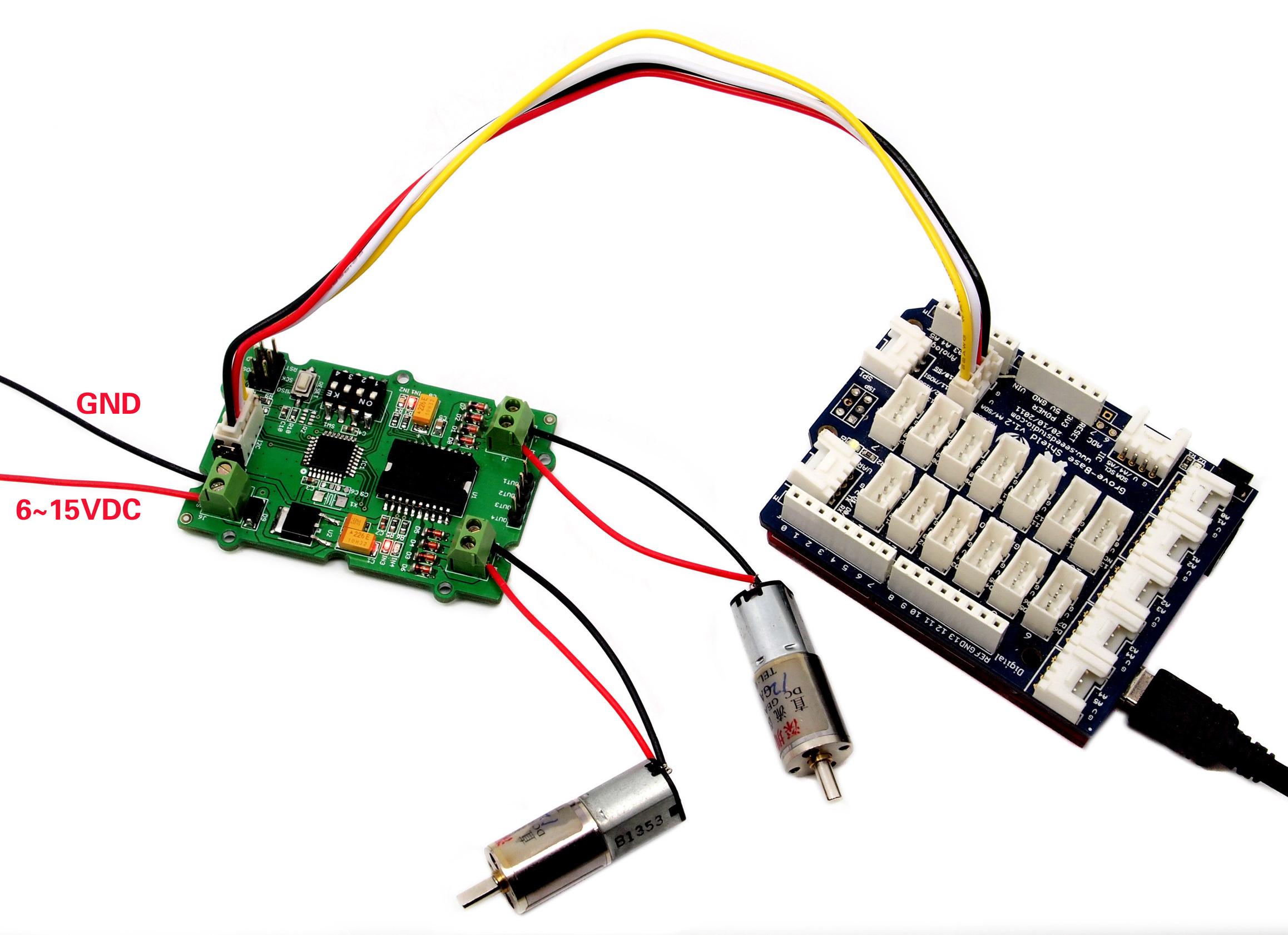
ハードウェア接続
-
ステップ 1 Grove - I2C Motor Driver (L298P) を Grove-Base Shield の I2C ポートに接続します。
-
ステップ 2 Grove - Base Shield を Seeeduino に差し込みます。
-
ステップ 3 USB ケーブルを使用して Seeeduino を PC に接続します。
ソフトウェアコード 1 - DC モーター
#include "Grove_I2C_Motor_Driver.h"
#define I2C_ADDRESS 0x0f // デフォルトの I2C アドレスは 0x0f
void setup() {
Serial.begin(9600);
Motor.begin(I2C_ADDRESS);
}
void loop() {
// MOTOR1 の速度を設定、時計回り、速度: -100~100
Motor.speed(MOTOR1, 50);
// MOTOR2 の速度を設定、反時計回り
Motor.speed(MOTOR2, -70);
delay(2000);
// MOTOR1 の速度と方向を変更
Motor.speed(MOTOR1, -100);
// MOTOR2 の速度と方向を変更
Motor.speed(MOTOR2, 100);
delay(2000);
// MOTOR1 と MOTOR2 を停止
Motor.stop(MOTOR1);
Motor.stop(MOTOR2);
delay(2000);
}
-
ステップ 1 Grove_I2C_Motor_Driver_v1_3 ライブラリ を Github からダウンロードします。
-
ステップ 2 ライブラリのインストール方法 を参照して、Arduino 用のライブラリをインストールします。
-
ステップ 3 コードを Arduino IDE にコピーしてアップロードします。コードのアップロード方法がわからない場合は、コードのアップロード方法 を確認してください。
speed() 関数を使用すると、任意の速度でモーターを駆動できます。
-
motor_id は使用するモーターを表します。MOTOR1 または MOTOR2 を指定できます。
-
_speed はモーターに設定する速度を表します。-100~100 の範囲で指定できます。_speed > 0 の場合、DC モーターは時計回りに回転し、_speed < 0 の場合は反時計回りに回転します。また、_speed の絶対値が大きいほど、DC モーターの速度は速くなります。
stop() 関数を使用すると、動作中の DC モーターを停止できます。
- motor_id は使用するモーターを表します。MOTOR1 または MOTOR2 を指定できます。
ソフトウェアコード 2 - ステッピングモーター
#include <Grove_I2C_Motor_Driver.h>
#define I2C_ADDRESS 0x0f // デフォルトの I2C アドレスは 0x0f
void setup() {
Serial.begin(9600);
Motor.begin(I2C_ADDRESS);
// ステッピングモーターを駆動
// _step: -1024~1024, _step > 0 の場合、ステッピングモーターは時計回りに回転;
// _step < 0 の場合、反時計回りに回転; _step が 512 の場合、ステッピングモーターは
// 1 回転する; _step が 1024 の場合、ステッピングモーターは 2 回転する。
Motor.StepperRun(-1024);
Motor.StepperRun(512);
}
void loop() {
// ここにコードを記述
}
24BYJ48 ステッピングモーター を例に取ると、ハードウェアの接続は以下のようになります:
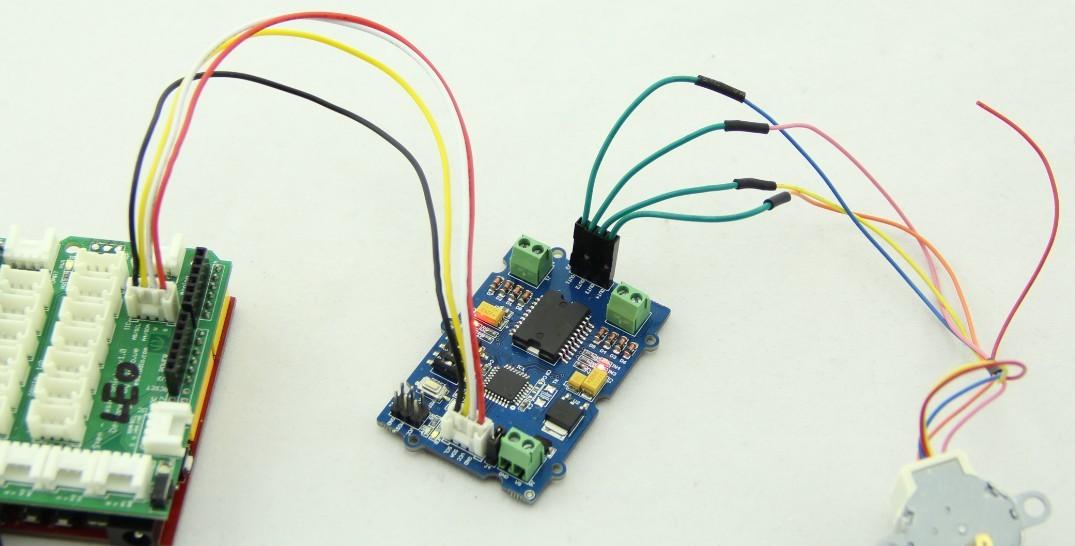
24BYJ48 ステッピングモーター と I2C Motor Driver の接続は以下のようになります:
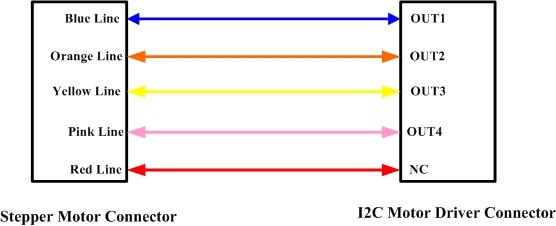
- _step はステッピングモーターに設定するステップ数を表します。-1024~1024 の範囲で指定できます。_step > 0 の場合、ステッピングモーターは時計回りに回転し、_step < 0 の場合は反時計回りに回転します。_step が 512/-512 の場合、ステッピングモーターは 1 回転し、_step が 1024/-1024 の場合は 2 回転します。ステッピングモーターは設定したステップ数を完了すると自動的に停止します。
PWM 周波数が変更できず、24Hz に固定されている場合は、Jlink または ST-link を使用してファームウェアを更新する必要があります。新しいファームウェアは以下から入手できます:
PWM 周波数を変更するには、Motor.frequence(50) を使用します。この値は最大 255Hz まで設定可能です。
回路図オンラインビューア
リソース
-
[PDF] STM32f030f4P6 データシート
-
[PDF] L298P データシート
-
[PDF] ハードウェア回路図
-
[Zip] モータードライバライブラリ
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品をご利用いただく際に、スムーズな体験を提供するため、さまざまなサポートをご用意しています。お客様の好みやニーズに応じた複数のコミュニケーションチャネルをご利用いただけます。