Grove - I2C モータードライバ (TB6612FNG)

Grove - I2C モータードライバ (TB6612FNG) は、2つのDCモーターを最大12V/1.2Aで駆動するか、1つのステッパーモーターを最大12V/1.2Aで駆動することができます。オンボードのMCUにより、Grove I2Cインターフェースを介してArduinoと簡単に連携できます。
このドライバーボードはTB6612FNGをベースにしており、低ON抵抗のLD MOS構造の出力トランジスタを備えたDCモーターおよびステッパーモーター用のドライバICです。2つの入力信号(IN1およびIN2)により、CW、CCW、ショートブレーキ、停止モードの4つのモードから選択できます。

バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove - I2C モータードライバ (TB6612FNG) | 初期リリース | 2018年9月 |
特徴
- オンボードMCU
- CW/CCW/ショートブレーキ/停止機能モード
- 内蔵の熱シャットダウン回路および低電圧検出回路
- スタンバイ(省電力)システム
仕様
| 項目 | 値 |
|---|---|
| MCU動作電圧 | 3.3V / 5V |
| モーター供給電圧 | 2.5 ~ 13.5 (5V 標準, 15V 最大) |
| 出力電流 | 1.2 A(平均)/3.2 A (ピーク) |
| スイッチング周波数 | 100kHz |
| ロジックインターフェース | I2C |
| I2Cアドレス | 0x14 (デフォルト) |
| I2Cアドレス範囲 | 0x01 ~ 0x7f (設定可能) |
| サイズ | 長さ: 60mm 幅: 40mm 高さ: 12mm |
| 重量 | 13g |
| パッケージサイズ | 長さ: 140mm 幅: 90mm 高さ: 12mm |
| 総重量 | 20g |
主な用途
- DCモーター制御
- ステッパーモーター制御
ハードウェア概要
ピン配置


ハードウェア詳細
I2Cインターフェース
このボードはI2Cインターフェースを使用して、オンボードMCUがホストコンピュータと通信します。
GND: このモジュールをシステムのGNDに接続
VCC: このモジュールには5Vまたは3.3Vを使用可能
SDA: I2Cシリアルデータ
SCL: I2Cシリアルクロック

電源入力
モーターにDC電源を供給します。入力範囲は2.5V ~ 13.5Vです。
GND: システムのGNDに接続し、電源の"-"を接続
VM: 電源の"+"を接続し、モーターに電力を供給

DCモーター出力
このボードには2チャンネルのDCモーター出力があり、各チャンネルで12V/1.2Aを出力できます。このドライバーボードを使用して、2つのDCモーターを同時に制御できます。
A1: チャンネルA出力1
A2: チャンネルA出力2
B1: チャンネルB出力1
B2: チャンネルB出力2

ステッパーモーター出力
このボードを使用して4線式ステッパーモーターを制御することも可能で、最大12V/1.2Aを出力できます。
OUT1: ステッパーモーターコイル1の一方の入力に接続
OUT2: ステッパーモーターコイル1のもう一方の入力に接続
OUT3: ステッパーモーターコイル2の一方の入力に接続
OUT4: ステッパーモーターコイル2のもう一方の入力に接続
実際には、DCポートとステッパーポートは物理的に接続されています。接続図は以下の通りです:
| DCポート | ステッパーポート |
|---|---|
| A1 | OUT1 |
| A2 | OUT2 |
| B1 | OUT3 |
| B2 | OUT4 |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応していると記載されているプラットフォームは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することは不可能です。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoで遊ぶ
ハードウェア
必要な材料
DCモーターデモ
| Seeeduino V4.2 | Base Shield | Grove - I2C Motor Driver (TB6612FNG) | DCモーター |
|---|---|---|---|
 |  |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
-
ステップ 1. DCモーターをドライバーボードのDC Motor Outputポートに接続し、外部DC電源をPower Inポートに接続します。
-
ステップ 2. Grove - I2C Motor Driver (TB6612FNG)をGrove-Base ShieldのI^2^Cポートに接続します。
-
ステップ 3. Grove - Base ShieldをSeeeduinoに差し込みます。
-
ステップ 4. USBケーブルを使用してSeeeduinoをPCに接続します。

ステッピングモーターデモ
| Seeeduino V4.2 | Base Shield | Grove - I2C Motor Driver (TB6612FNG) | ステッピングモーター |
|---|---|---|---|
| | |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 1. ステッピングモーターをドライバーボードのStepper Motor Outputポートに接続し、外部DC電源をPower Inポートに接続します。
このドライバーボードは4線式ステッピングモーターに適しています。使用するステッピングモーターによって配線の色が異なります。ここではモーター24BYJ48を使用し、配線は以下の表の通りです。
| ピン名 | ステッピングモーターのワイヤー | ワイヤー色(24BYJ48) |
|---|---|---|
| OUT1 | コイル1の片端 | オレンジ |
| OUT2 | コイル1のもう片端 | 青 |
| OUT3 | コイル2の片端 | ピンク |
| OUT4 | コイル2のもう片端 | 黄色 |

-
ステップ 2. Grove - I2C Motor Driver (TB6612FNG)をGrove-Base ShieldのI^2^Cポートに接続します。
-
ステップ 3. Grove - Base ShieldをSeeeduinoに差し込みます。
-
ステップ 4. USBケーブルを使用してSeeeduinoをPCに接続します。

DCポートとステッパーポートは物理的に接続されているため、2つのDCポートを使用してステッパーモーターを制御することもできます。接続図は以下の通りです:

Grove Base Shieldがない場合でも、以下のようにこのモジュールをSeeeduinoに直接接続することができます。
| Seeeduino | Groveケーブル | Grove - I2C Motor Driver (TB6612FNG) |
|---|---|---|
| GND | 黒 | GND |
| 5Vまたは3.3V | 赤 | VCC |
| SDA | 白 | SDA |
| SCL | 黄 | SCL |
ソフトウェア
Arduinoを初めて使用する場合は、開始する前にArduinoの始め方を参照することを強くお勧めします。
-
ステップ1. Grove_Motor_Driver_TB6612FNGライブラリをGithubからダウンロードします。
-
ステップ2. ライブラリのインストール方法を参照して、Arduino用のライブラリをインストールします。
-
ステップ3. Arduino IDEを再起動します。デフォルトの例を開きます。以下の2つの例を提供しています:
dc_motor: DCモーターのデモ
stepper_motor_2phase: 4線式、2相ステッパーモーターのデモ。
以下の2つの方法で開くことができます(dc_motorを例に取ります):
- Arduino IDEで直接開く:File --> Examples --> Grove - Motor Driver(TB6612FNG) --> dc_motorのパスをたどります。
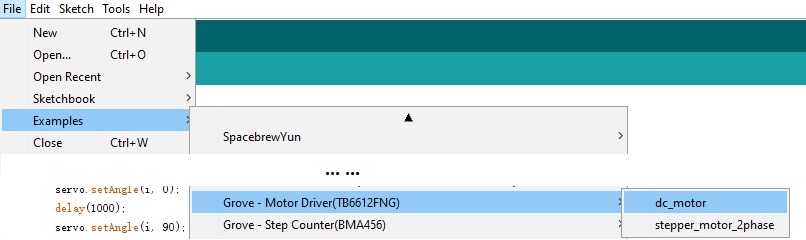
- コンピュータで開く:XXXX\Arduino\libraries\Grove_Motor_Driver_TB6612FNG-master\examples\dc_motorフォルダ内のdc_motor.inoをクリックします。XXXXはArduino IDEをインストールした場所です。

- ステップ4. デモをアップロードします。コードのアップロード方法がわからない場合は、コードのアップロード方法を確認してください。
すべてが正常に動作すれば、外部電源ポートに電源を入れるとモーターが動作します。
Raspberry Pi 4 コンピュータで遊ぶ
ハードウェア
必要な材料
DCモーターデモ
| Raspberry Pi 4 コンピュータ | Grove Base Hat for Raspberry Pi | Grove - I2C Motor Driver (TB6612FNG) | DCモーター |
|---|---|---|---|
 |  | | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ1. DCモーターをドライバーボードのDC Motor Outputポートに接続し、外部DC電源をPower Inポートに接続します。

-
ステップ2. Grove - I2C Motor Driver (TB6612FNG)をGrove Base Hat for Raspberry PiのI^2^Cポートに接続します。
-
ステップ3. Grove Base Hat for Raspberry PiをRaspberry Pi 4 コンピュータに接続します。
-
ステップ4. Raspberry Pi 4 コンピュータをディスプレイに接続します。

Raspberry Piを初めて使用する場合は、開始する前にGetting started with Raspberryを参照してください。
ソフトウェア
Raspberry Pi OS >= Bullseyeを搭載したRaspberry Piを使用している場合は、このコマンドラインをPython3のみで使用する必要があります。 MarkusBanskyがGrove_Motor_Driver_TB6612FNGのソフトウェアライブラリと学習リソースをRaspberry Pi 4およびPython3向けに提供しています。 これは、Grove Arduino LibraryをRaspberry Pi用Grove I2C Motor Driver on TB6612FNGに移植したものです。
必要条件
- RaspberryPi Linuxイメージ
- Python 3.6以上
- smbusライブラリ
- timeライブラリ
- mathライブラリ
ライブラリにはモーターのスムーズな始動のための6つのイージング関数が含まれています。 現在、イージング関数は1つのモーターに対してのみ使用可能です。 INおよびOUT関数を含みます。
ライブラリの使用方法
Raspberry Pi OS >= Bullseyeを搭載したRaspberry Piを使用している場合は、このコマンドラインをPython3のみで使用する必要があります。
まず、pipの最新リリースバージョンを実行していることを確認してください。このライブラリをインストールするには、pip.confに追加のindex-urlを追加する必要があります。これを行うには、sudo nano /etc/pip.confで設定ファイルを編集し、[global]セクションの直後に次の行を挿入します:
index-url=https://pypi.python.org/
これで通常通りパッケージをインストールできます。Python3を使用する場合、以下のように実行してください:
python3 -m pip install raspberry-i2c-tb6612fng
ライブラリのインストールが成功したら、以下のコードを使用して raspberry-i2c-tb6612fng ディレクトリに移動してください。
cd raspberry-i2c-tb6612fng
最後のステップとして、テストコードを実行します。
python3 test.py

すべてが正常に動作していれば、python3 test.py を入力するとモーターが動作します。
回路図オンラインビューア
リソース
-
[PDF] TB6612FNG データシート
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品をスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お客様のご希望やニーズに応じた複数のコミュニケーションチャネルをご用意しています。