Grove - ラインファインダー V1.1
Grove - ラインファインダーは、ライン追従ロボット用に設計されています。このモジュールには、赤外線(IR)発光LEDと赤外線感知フォトトランジスタが搭載されています。これにより、マイクロコントローラーにデジタル信号を出力し、ロボットが白い背景上の黒い線、またはその逆を追従することが可能です。

バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove-Line Finder V1.0 | 初期リリース | 2010年1月29日 |
| Grove-Line Finder V1.1 | テストポイントを追加 | 2015年12月28日 |
仕様
| パラメータ | 値/範囲 |
|---|---|
| 電源供給 | 5V |
| デジタル出力モード | TTL(黒を検出した場合はHigh、白を検出した場合はLow) |
| コネクタ | 4ピンバックル付きGroveインターフェース |
| 寸法 | 20mm×20mm |
| ROHS | 対応 |
| フォトリフレクティブダイオード | RS-06WD |
| コンパレータ | MV358 |
!!!Tip Groveモジュールの詳細については、Grove Systemをご参照ください。
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記に記載されている対応プラットフォームは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することはできません。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoで遊ぶ
ハードウェア
- ステップ1. 以下のものを準備してください:
| Seeeduino V4.2 | Base Shield | Grove - Button |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
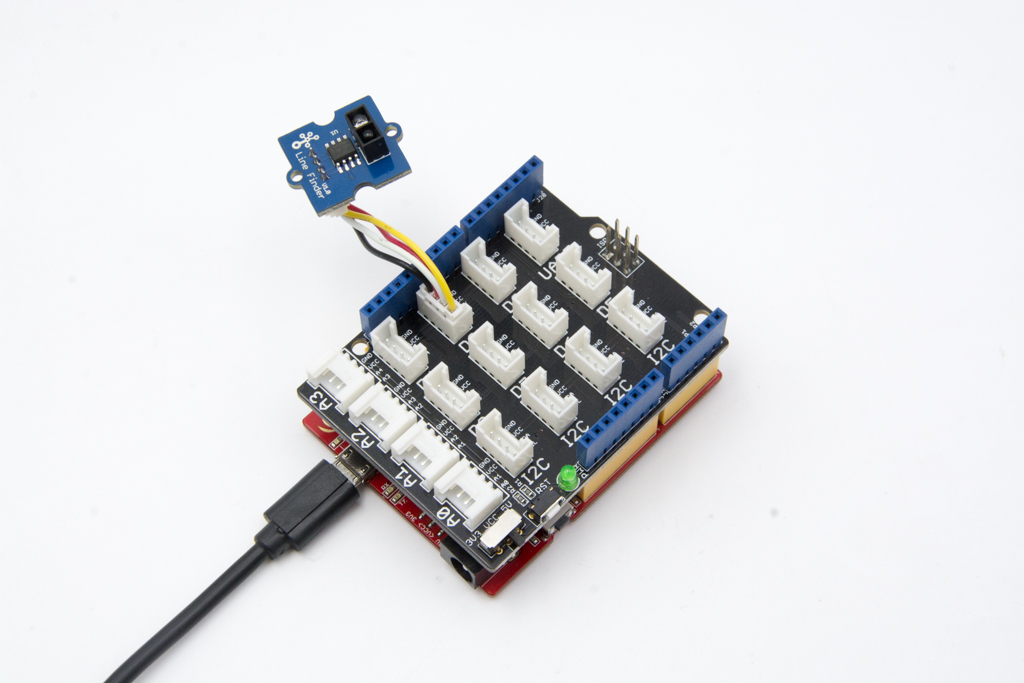
- ステップ2. Grove-Line FinderをGrove-Base ShieldのポートD3に接続します。
- ステップ3. Grove - Base ShieldをSeeeduinoに差し込みます。
- ステップ4. USBケーブルを使ってSeeeduinoをPCに接続します。
Grove Base Shieldがない場合は、以下のようにGrove-Line FinderをSeeeduinoに直接接続することもできます。
| Seeeduino | Grove-Line Finder |
|---|---|
| 5V | 赤 |
| GND | 黒 |
| 接続なし | 白 |
| D3 | 黄色 |
ソフトウェア
- ステップ1. 以下のコードをArduino IDEにコピーしてアップロードしてください。
//------------------------------------------------------------
//名前: ラインファインダー デジタルモード
//機能: 黒線または白線を検出
//パラメータ: デジタル信号がHIGHの場合、黒線
// デジタル信号がLOWの場合、白線
//-------------------------------------------------------------
int signalPin = 3; // デジタルピン3に接続
void setup() {
pinMode(signalPin, INPUT); // デジタルピンを出力として初期化
Serial.begin(9600); // シリアル通信を9600bpsで初期化
}
// loop()メソッドはArduinoが電源を持つ限り繰り返し実行されます
void loop()
{
if(HIGH == digitalRead(signalPin))
Serial.println("黒");
else Serial.println("白"); // 色を表示
delay(1000); // 1秒待機
}
- ステップ2. シリアルポートを開き、センサーを黒線の上に置くと「黒」、白いエリアの上に置くと「白」と表示されます。
白
白
白
黒
黒
黒
黒
黒
Codecraftで遊ぶ
ハードウェア
ステップ1. Grove - Line FinderをBase ShieldのポートD3に接続します。
ステップ2. Base ShieldをSeeeduino/Arduinoに差し込みます。
ステップ3. USBケーブルを使ってSeeeduino/ArduinoをPCに接続します。
ソフトウェア
ステップ1. Codecraftを開き、Arduinoサポートを追加し、メインプロシージャを作業エリアにドラッグします。
Codecraftを初めて使用する場合は、Arduinoを使用したCodecraftガイドも参照してください。
ステップ2. 以下の画像のようにブロックをドラッグするか、このページの最後でダウンロードできるcdcファイルを開きます。
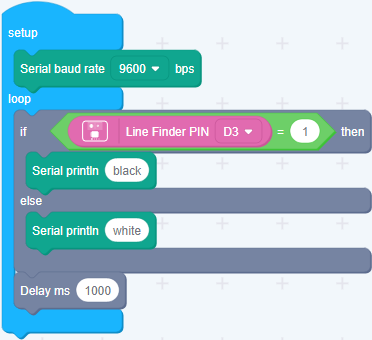
プログラムをArduino/Seeeduinoにアップロードします。
コードのアップロードが完了すると、シリアルモニターでラインが検出されたかどうかが表示されます。
Raspberry Piで遊ぶ
ハードウェア
- ステップ1. 以下のものを準備してください:
| Raspberry Pi | GrovePi_Plus | Grove - Line Finder |
|---|---|---|
 |  | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
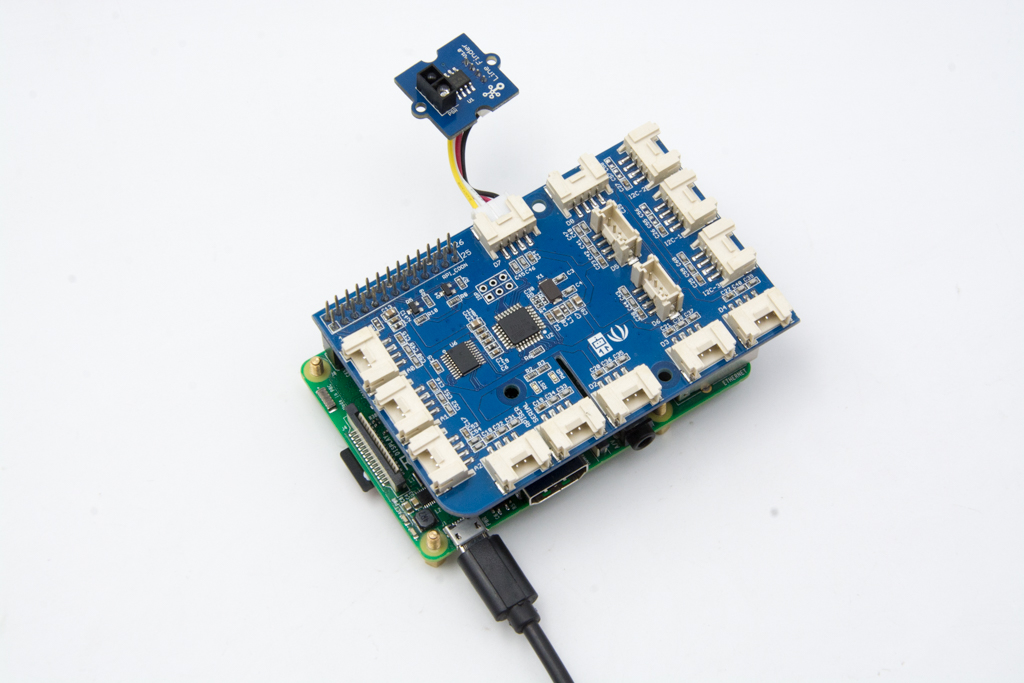
- ステップ2. GrovePi_PlusをRaspberryに差し込みます。
- ステップ3. Grove-Line FinderをGrovePi_PlusのポートD7に接続します。
- ステップ4. USBケーブルを使ってRaspberryをPCに接続します。
ソフトウェア
- ステップ1. ソフトウェアの設定に従って開発環境を構成します。
- ステップ2. GitHubリポジトリをクローンします。
cd ~
git clone https://github.com/DexterInd/GrovePi.git
- ステップ3. 以下のコマンドを実行します。
cd ~/GrovePi/Software/Python
python grove_line_finder.py
以下はgrove_line_finder.pyのコードです。
import time
import grovepi
# Grove Line FinderをデジタルポートD7に接続
# SIG,NC,VCC,GND
line_finder = 7
grovepi.pinMode(line_finder,"INPUT")
while True:
try:
# 黒線が検出されるとHIGHを返し、白線が検出されるとLOWを返します
if grovepi.digitalRead(line_finder) == 1:
print ("黒線が検出されました")
else:
print ("白線が検出されました")
time.sleep(.5)
except IOError:
print ("エラー")
- ステップ4. センサーが黒線の上にあるときに「黒線が検出されました」と表示されます。
pi@raspberrypi:~/GrovePi/Software/Python $ python grove_line_finder.py
黒線が検出されました
黒線が検出されました
白線が検出されました
白線が検出されました
Grove-Line Finder 回路図 V1.0
Grove-Line Finder 回路図 V1.1
リソース
- [Eagle&PDF] Grove-Line Finder 回路図 V1.0
- [Eagle&PDF] Grove-Line Finder 回路図 V1.1
- [データシート] LMV358.PDF
- [Codecraft] CDC ファイル
技術サポート & 製品ディスカッション
産業用センサーへのアップグレード
SenseCAP S2110 コントローラー と S2100 データロガー を使用することで、Grove を簡単に LoRaWAN® センサーに変えることができます。Seeed はプロトタイピングをサポートするだけでなく、SenseCAP シリーズの堅牢な 産業用センサー を使用してプロジェクトを拡張する可能性も提供します。
IP66 ハウジング、Bluetooth 設定、グローバル LoRaWAN® ネットワークとの互換性、内蔵 19 Ah バッテリー、そして強力なアプリサポートにより、SenseCAP S210x は産業用途に最適な選択肢となります。このシリーズには、土壌水分、空気温度と湿度、光強度、CO2、EC、そして 8-in-1 気象ステーション用センサーが含まれています。次の成功する産業プロジェクトに向けて、最新の SenseCAP S210x をお試しください。
