Grove - MOSFET
Grove – MOSFET は、マイクロコントローラの低電圧(例えば 5V)で高電圧プロジェクト(例えば 15V DC)を制御することを可能にします。MOSFET はスイッチの一種でもありますが、そのスイッチング周波数は最大 5MHz に達し、通常の機械式リレーよりもはるかに高速です。基板には 2 つのスクリュー端子があります。一方は外部電源用、もう一方は制御したいデバイス用です。Grove – MOSFET は閉じた状態で一方の端から他方の端へ電力を通します。ただし、外部電源がない場合でも、デバイスは Grove インターフェースを介してマイクロコントローラから電力を供給することができます。
![]()
バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove - MOSFET V1.0 | 初版 | 2015年10月 |
仕様
| パラメータ | 値/範囲 |
|---|---|
| 動作電圧 | 5V |
| Vin | 5 ~ 15V |
| MOSFET モデル | CJQ4435 |
Grove モジュールの詳細については、Grove System を参照してください。
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応プラットフォームとして記載されているものは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduino プラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能な MCU プラットフォーム向けにソフトウェアライブラリやデモコードを提供することはできません。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoを初めて使用する場合は、開始前にArduinoの使い方をご覧になることを強くお勧めします。
Arduinoで遊ぶ
デモンストレーション
ここでは、Grove - MOSFETを使用してモーターを制御する方法を説明します。外部電源を使用して電力を供給しますが、制御するデバイスが300mA未満の電流を必要とする場合、Seeeduinoだけで十分であり、追加の電源は必要ありません。
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Seeeduino V4.2 | Base Shield | Grove - MOSFET |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
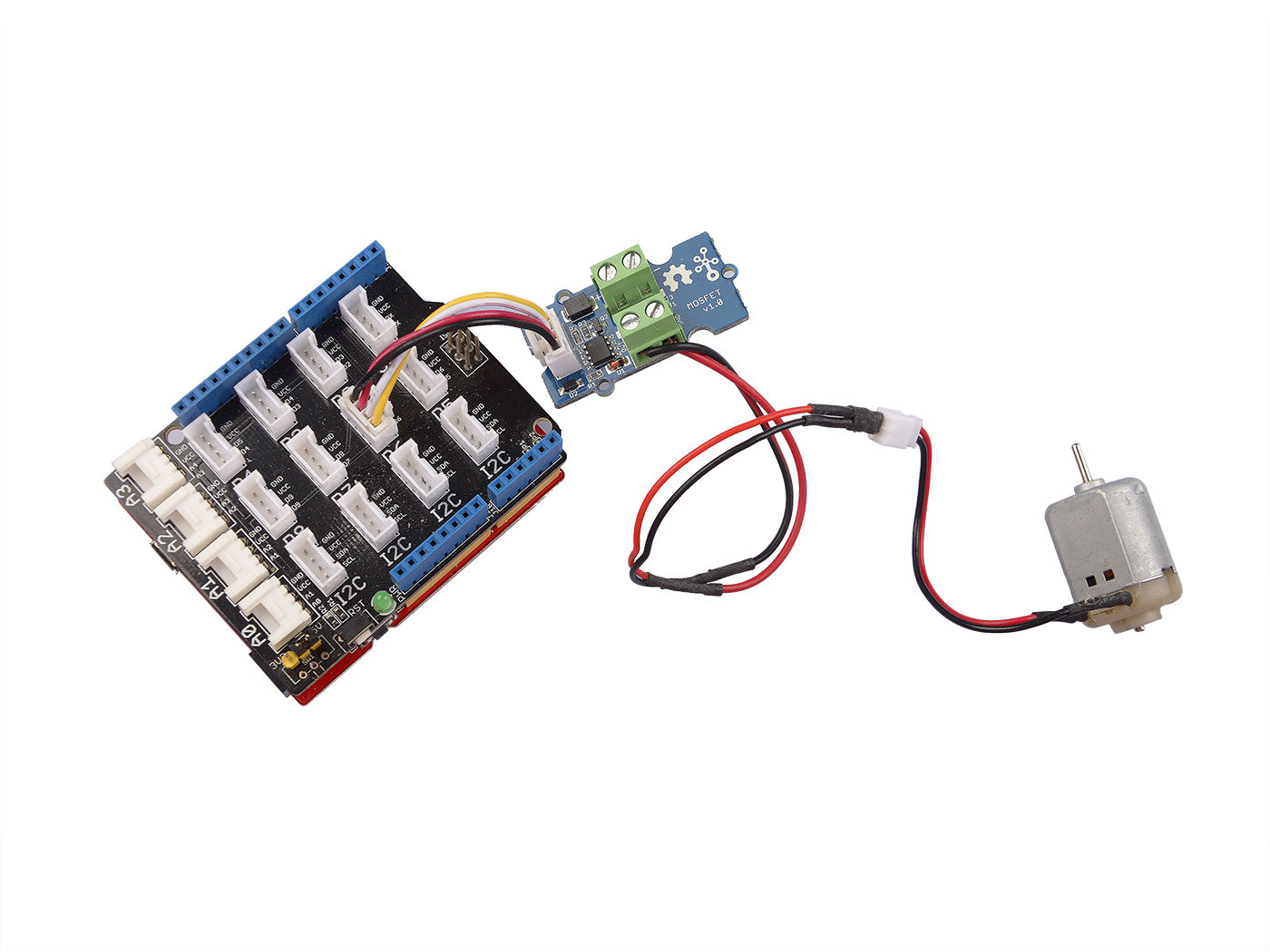
- ステップ 2. Grove - MOSFETをGrove-Base ShieldのD6ポートに接続します。
- ステップ 3. Grove - Base ShieldをSeeeduinoに差し込みます。
- ステップ 4. USBケーブルを使用してSeeeduinoをPCに接続します。
Grove Base Shieldがない場合でも、以下のようにGrove_MOSFETをSeeeduinoに直接接続することができます。
| Seeeduino | Grove_MOSFET |
|---|---|
| 5V | 赤 |
| GND | 黒 |
| 接続なし | 白 |
| D6 | 黄 |
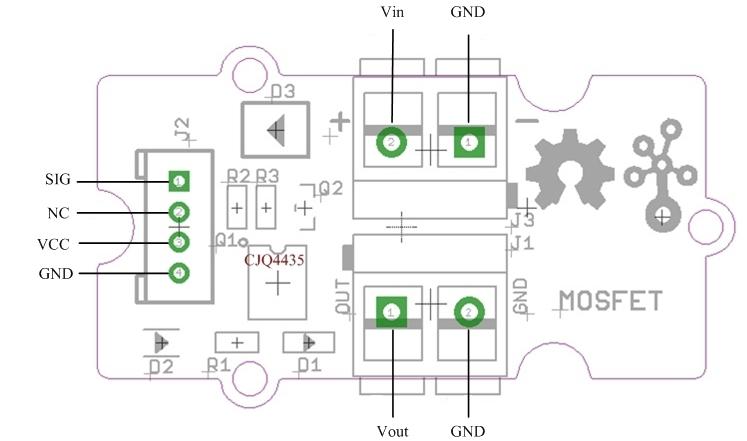
Vin: 5V ~ 15Vの電源を受け入れます(電流は2A未満)。
Vout: ここにアクチュエータを接続します。
ソフトウェア
- ステップ 1. 以下のコードをArduino IDEにコピーしてアップロードします。コードのアップロード方法がわからない場合は、コードのアップロード方法をご確認ください。
// Grove - MOSFETのデモ
// PWMピン6を使用してモーターを制御
int motorPin = 6;
void setup()
{
Serial.begin(38400);
pinMode(motorPin, OUTPUT);
Serial.println("Grove - MOSFET テストデモ!");
}
void loop()
{
motorOnThenOffWithSpeed();
motorAcceleration();
}
void motorOnThenOffWithSpeed()
{
int onSpeed = 200; // 0(停止)から255(全速)の間の数値
int onTime = 2500;
int offSpeed = 50; // 0(停止)から255(全速)の間の数値
int offTime = 1000;
analogWrite(motorPin, onSpeed);
delay(onTime);
analogWrite(motorPin, offSpeed);
delay(offTime);
}
void motorAcceleration()
{
int delayTime = 50;
for(int i=0; i<256; i++)
{
analogWrite(motorPin, i);
delay(delayTime);
}
for(int i=255; i>=0; i--)
{
analogWrite(motorPin, i);
delay(delayTime);
}
}
- ステップ 2. モーターの状態を観察します。

Raspberry Piで遊ぶ
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Raspberry Pi | GrovePi_Plus | Grove - MOSFET |
|---|---|---|
 |  | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
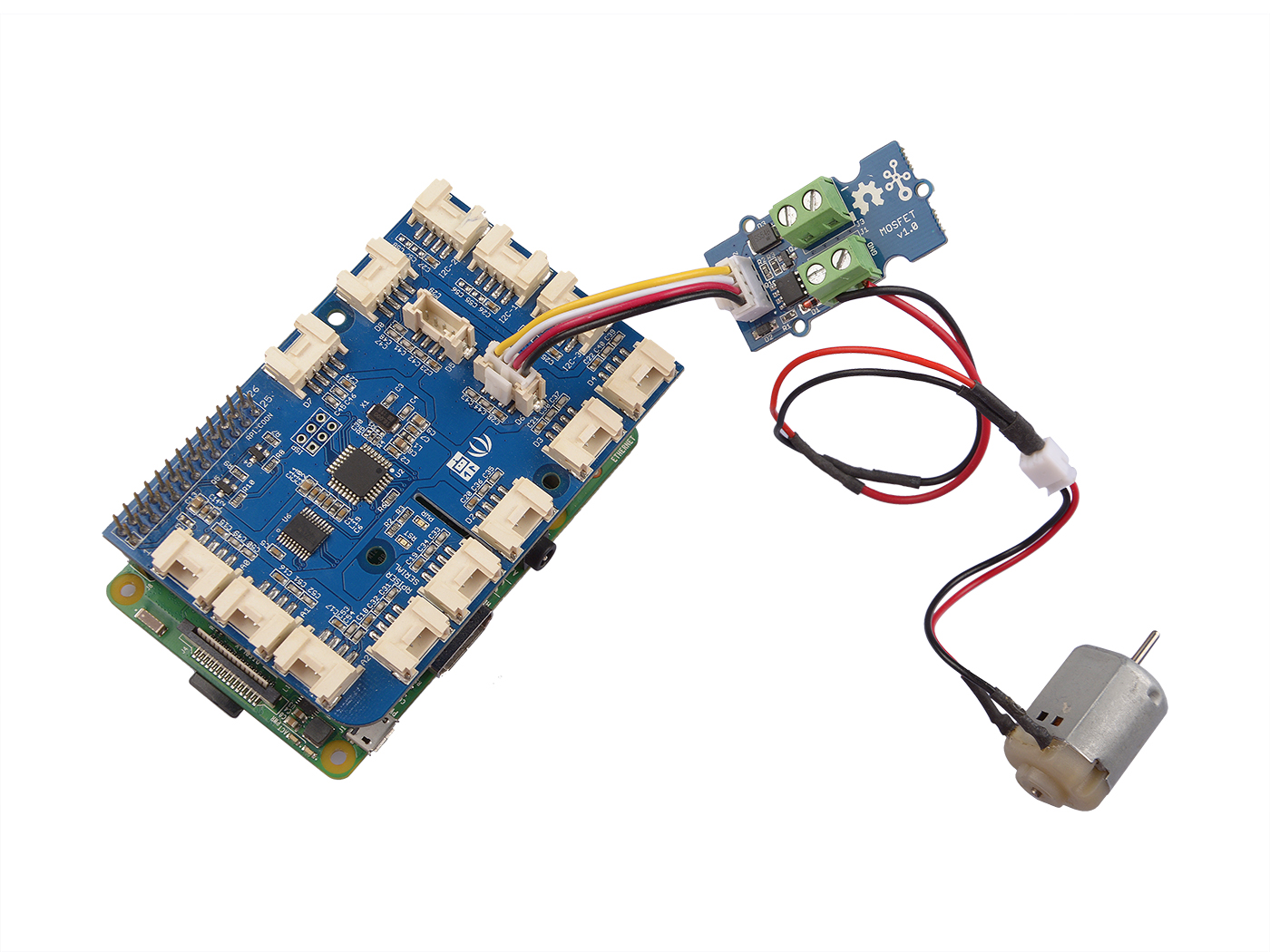
- ステップ 2. GrovePi_PlusをRaspberry Piに差し込みます。
- ステップ 3. Grove-MOSFETをGrovePi_PlusのD6ポートに接続します。
- ステップ 4. USBケーブルを使用してRaspberry PiをPCに接続します。
ソフトウェア
- ステップ 1. デモディレクトリに移動します:
cd yourpath/GrovePi/Software/Python/
- ステップ 2. コードを確認します:
nano grove_mosfet.py # "Ctrl+x"で終了 #
import time
import grovepi
# Grove MOSFETをデジタルポートD6に接続
# SIG,NC,VCC,GND
mosfet = 6
grovepi.pinMode(mosfet,"OUTPUT")
time.sleep(1)
while True:
try:
# 全速
grovepi.analogWrite(mosfet,255)
print "全速"
time.sleep(2)
# 半速
grovepi.analogWrite(mosfet,128)
print "半速"
time.sleep(2)
# 停止
grovepi.analogWrite(mosfet,0)
print "停止"
time.sleep(2)
except KeyboardInterrupt:
grovepi.analogWrite(mosfet,0)
break
except IOError:
print "エラー"
- ステップ 3. デモを実行します:
sudo python grove_mosfet.py
- ステップ 4. ターミナルに以下のような出力が表示されます。
|
リソース
- [Eagle] Grove - MOSFET 回路図ファイル
- [PDF] Grove - MOSFET 回路図 PDF
- [データシート] CJQ4435 データシート
- [WIKI] MOSFET Wikipedia
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!お客様が弊社製品をスムーズにご利用いただけるよう、さまざまなサポートを提供しております。異なる好みやニーズに対応するため、いくつかのコミュニケーションチャネルをご用意しています。