Grove - マウスエンコーダ

Grove - マウスエンコーダは、回転方向と回転速度のフィードバックデータを持つ機械式インクリメンタルロータリーエンコーダの一種です[1]。標準的なGroveインターフェースを備えており、配線やプログラミングの作業を大幅に軽減します。また、重負荷や過酷な環境に適応しています。この製品は、玩具、ロボット、消費者向け入力デバイスに応用できます。

注意
回転速度は1000 rad/min(ラジアン毎分)未満に設計されています。特徴
- 様々な環境に対応可能。
- 重負荷や過酷な環境に適応。
- デテント付きで快適な操作感。
- 標準的なGroveインターフェースでプログラミングと配線が簡単。
- 高精度で信頼性が高い。
ヒント
Groveモジュールの詳細については、Grove Systemをご参照ください。
用途
玩具、ロボット、消費者向け入力デバイスなど、過酷な環境での様々な用途に対応可能です。
仕様
| 項目 | 最小値 | 標準値 | 最大値 |
|---|---|---|---|
| 動作電圧(V) | 3.3 | 5.5 | |
| 動作電流(mA) | 10 | 13 | |
| デューティ比(一定速度) | 50% | ||
| 位相差(一定速度) | π/4 | ||
| 1回転あたりのパルス数 | 12 |
注意
- 製品リストにはノブが含まれていません。これは、このエンコーダを様々な環境により適応させるためです。
- 寸法ファイルをPDF形式で提供しており、寸法に基づいてノブをカスタマイズできます。
ヒント
プロジェクトのプロトタイプを構築する場合は、適切な六角ドライバービットを使用するだけで済みます。ハードウェア概要
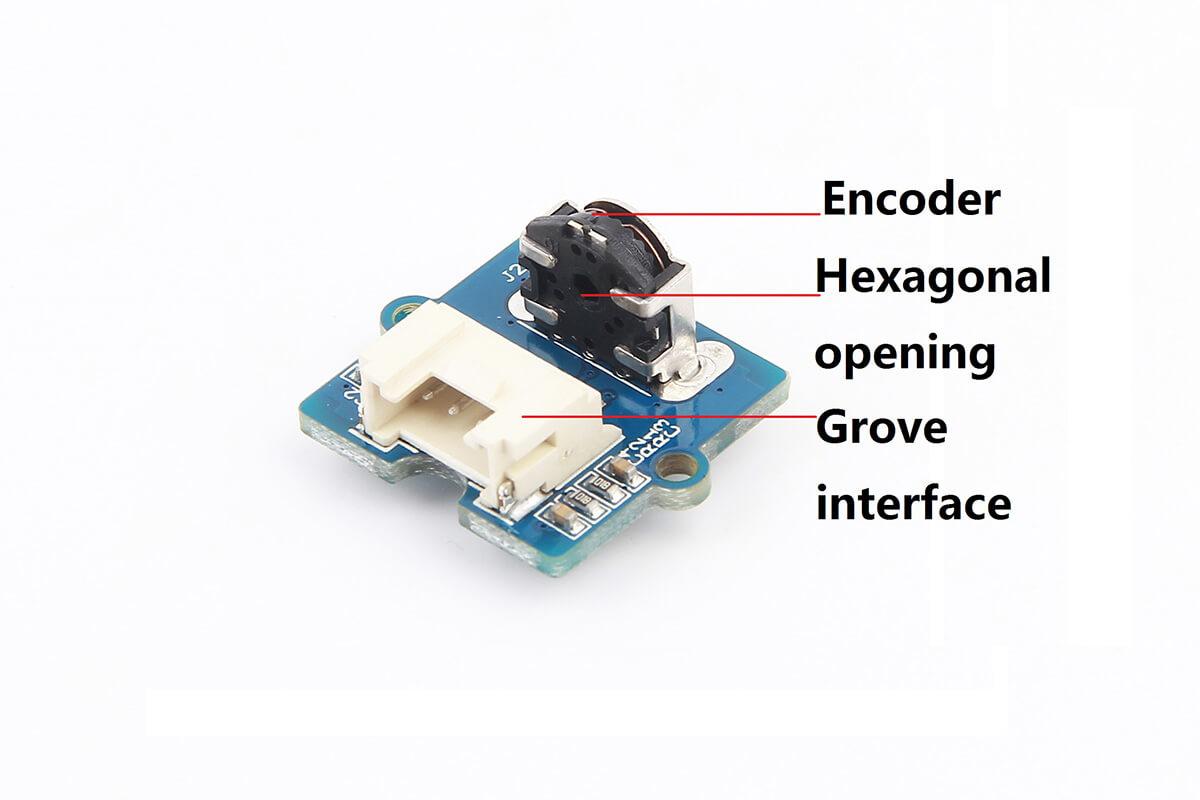
Groveインターフェース
ドライバーボードとSeeeduinoボードなどのメイン制御ボードを接続します。
六角形の開口部
ノブを通すための開口部。
部品リスト
| 部品名 | 数量 |
|---|---|
| Grove - マウスエンコーダ(ノブなし) | 1 個 |
| Grove - ユニバーサルケーブル | 1 個 |
はじめに
このセクションでは、Grove - マウスエンコーダを使用してアプリケーションを構築するためのIDE環境の構築方法を説明します。
注意
- 回転速度が遅い場合、デューティ比は大きくなります。
- 回転速度が一定でない場合、パルス幅(PW)は同じになりません。
- 回転速度が1000 rad/minを超えると、出力PWが狭くなるか、このエンコーダが損傷する可能性があります。
- このエンコーダ内のパルス位置が不確定であるため、回転していない場合の出力電圧は(高電圧または低電圧)不確定になります。
基本デモ
このデモでは、位置検出と方向検出の方法を示します。
必要な材料
- Seeeduino V4.2
- ベースシールド V2.0
- USBケーブル(タイプAからマイクロタイプB)
接続
以下のように材料を接続します:

コード
/* クアドラチャエンコーダの読み取り
* エンコーダをピン encoder0PinA, encoder0PinB, および +5V に接続します。
*
* スケッチ作成者: max wolf / www.meso.net
* バージョン 0.1 - 非常に基本的な機能 - mw 20061220
*
*/
int val;
int encoder0PinA = 3;
int encoder0PinB = 4;
int encoder0Pos = 0;
int encoder0PinALast = LOW;
int n = LOW;
void setup() {
pinMode (encoder0PinA,INPUT);
pinMode (encoder0PinB,INPUT);
Serial.begin (115200);
}
void loop() {
n = digitalRead(encoder0PinA);
if ((encoder0PinALast == LOW) && (n == HIGH)) {
if (digitalRead(encoder0PinB) == LOW) {
encoder0Pos--;
} else {
encoder0Pos++;
}
Serial.println(encoder0Pos);
Serial.println ("/");
}
encoder0PinALast = n;
}
- コードをコピーしてコントローラーボードにフラッシュします。
- モニターウィンドウを開きます。
- 六角ドライバービットを左または右に回して、何が起こるか確認します。
出力結果:

回路図オンラインビューア
リソース
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しております。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しています。