Grove - Rotary Angle Sensor
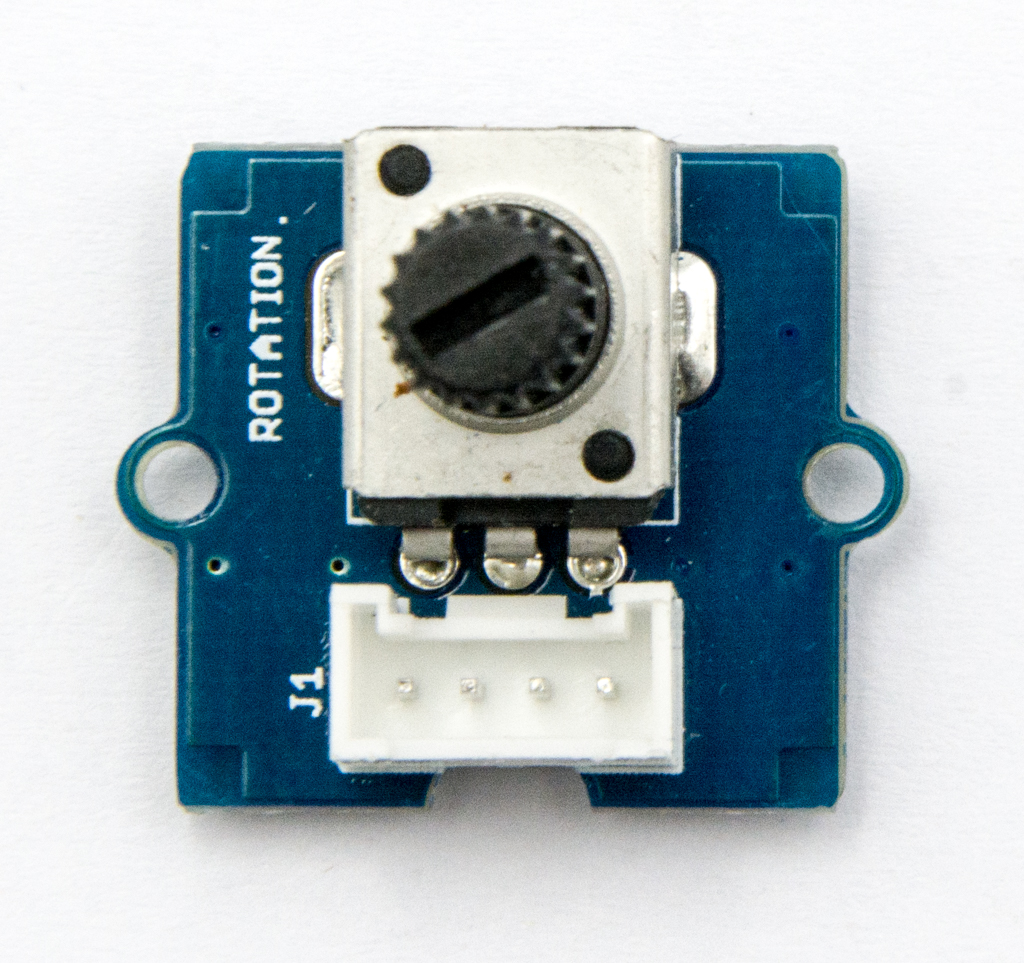
ロータリー角度センサーは、D1コネクタで0からVcc(Seeeduinoでは5V DC)の間のアナログ出力を生成します。D2コネクタは使用されません。角度範囲は300度で、値は線形に変化します。抵抗値は10kオームで、Arduinoでの使用に最適です。このセンサーは「ポテンショメータ」としても知られています。
![]()
もう1つの製品、Grove - Rotary Angle Sensor(P)があります。「P」とは何を意味するのでしょうか?この製品では「P」は「パネルマウント」を意味します。これはGrove - Rotary Angle Sensorの姉妹版です。両者はほぼ同一ですが、Groveコネクタが背面に移動しており、すっきりとした配線不要のヒューマンインターフェースデバイスとして簡単に使用できます。
 |  |
![]()
バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove-Rotary Angle Sensor(P) V1.1 | 初版 | 2013年1月 |
| Grove-Rotary Angle Sensor V1.2 | 初版 | 2014年5月 |
特徴
- Groveインターフェース
- 簡単に使用可能
- Groveベースモジュール
Groveモジュールの詳細については、Grove Systemを参照してください。
仕様
| 項目 | 最小 | 標準 | 最大 | 単位 |
|---|---|---|---|---|
| 電圧 | 4.75 | 5.0 | 5.25 | VDC |
| 回転角度 | 0 | / | 300 | 度 |
| 寸法 | / | 19x19x30.1 | / | mm |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応プラットフォームとして記載されているものは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することは不可能です。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoを初めて使用する場合は、開始前にArduinoの使い方をご覧になることを強くお勧めします。
Arduinoで遊ぶ
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Seeeduino V4.2 | Base Shield | Grove-Rotary Angle Sensor | Grove-LED |
|---|---|---|---|
 |  |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 2. Grove-Rotary Angle SensorをGrove-Base ShieldのA0ポートに接続します。
- ステップ 3. Grove-LEDをGrove-Base ShieldのD3ポートに接続します。
- ステップ 4. Grove - Base ShieldをSeeeduinoに差し込みます。
- ステップ 5. USBケーブルを使用してSeeeduinoをPCに接続します。

Grove Base Shieldがない場合は、以下のようにGrove-Rotary Angle SensorとGrove-LEDをSeeeduinoに直接接続することもできます。Grove-LEDはPWMポートに接続する必要があります。Seeeduinoの場合、D3, 5, 6, 9, 10, 11が該当します。
| Seeeduino | Grove-Rotary Angle Sensor | Seeeduino | Grove-LED |
|---|---|---|---|
| 5V | 赤 | 5V | 赤 |
| GND | 黒 | GND | 黒 |
| NC | 白 | NC | 白 |
| A0 | 黄 | D3 | 黄 |
ソフトウェア
- ステップ 1. 以下のコードをArduino IDEにコピーしてArduinoにアップロードしてください。コードのアップロード方法がわからない場合は、コードのアップロード方法をご確認ください。
/*ロータリー角度センサーとLEDピンのマクロ定義*/
#define ROTARY_ANGLE_SENSOR A0
#define LED 3 // Grove - LEDはArduinoのPWMピンD3に接続されています
#define ADC_REF 5 // ADCの基準電圧は5Vです。SeeeduinoボードのVccスイッチが3V3に切り替わっている場合、ADC_REFは3.3にする必要があります
#define GROVE_VCC 5 // GroveインターフェースのVCCは通常5Vです
#define FULL_ANGLE 300 // ロータリー角度の最大値は300度です
void setup()
{
Serial.begin(9600);
pinMode(ROTARY_ANGLE_SENSOR, INPUT);
pinMode(LED,OUTPUT);
}
void loop()
{
float voltage;
int sensor_value = analogRead(ROTARY_ANGLE_SENSOR);
voltage = (float)sensor_value*ADC_REF/1023;
float degrees = (voltage*FULL_ANGLE)/GROVE_VCC;
Serial.println("マークと開始位置の間の角度:");
Serial.println(degrees);
int brightness;
brightness = map(degrees, 0, FULL_ANGLE, 0, 255);
analogWrite(LED,brightness);
delay(500);
}
- ステップ 2. Grove-Rotary Angle Sensorを調整すると、Grove-LEDの明るさが変化するのが確認できます。
Codecraftで遊ぶ
ハードウェア
ステップ 1. Grove - Rotary Angle SensorをポートA0に接続し、Grove - Red LEDをBase ShieldのポートD3に接続します。
ステップ 2. Base ShieldをSeeeduino/Arduinoに差し込みます。
ステップ 3. USBケーブルを使用してSeeeduino/ArduinoをPCに接続します。
ソフトウェア
ステップ 1. Codecraftを開き、Arduinoサポートを追加し、メインプロシージャを作業エリアにドラッグします。
Codecraftを初めて使用する場合は、ArduinoでCodecraftを使用するガイドもご覧ください。
ステップ 2. 以下の画像のようにブロックをドラッグするか、このページの最後でダウンロードできるcdcファイルを開きます。

プログラムをArduino/Seeeduinoにアップロードします。
コードのアップロードが完了すると、センサーの角度に応じてLEDの明るさが変化し、角度の値がシリアルモニターに表示されます。
Raspberry Piで遊ぶ (Grove Base Hat for Raspberry Piを使用)
ハードウェア
- ステップ 1. このプロジェクトで使用するもの:
| Raspberry pi | Grove Base Hat for RasPi | Grove - Rotary Angle Sensor |
|---|---|---|
 |  | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 2. Grove Base HatをRaspberryに差し込みます。
- ステップ 3. ロータリーセンサーをBase HatのポートA0に接続します。
- ステップ 4. USBケーブルを使用してRaspberry PiをPCに接続します。

ステップ3では、ロータリー角度センサーを任意のアナログポートに接続することができますが、対応するポート番号に合わせてコマンドを変更する必要があります。
ソフトウェア
Raspberry Pi OS >= Bullseyeを使用している場合は、Python3のみでこのコマンドラインを使用する必要があります。
- ステップ 1. ソフトウェアの設定に従って開発環境を構成します。
- ステップ 2. grove.pyライブラリをクローンしてソースファイルをダウンロードします。
cd ~
git clone https://github.com/Seeed-Studio/grove.py
- ステップ 3. 以下のコマンドを実行してコードを動かします。
cd grove.py/grove
python3 grove_rotary_angle_sensor.py 0
以下は grove_rotary_angle_sensor.py のコードです。
import math
import sys
import time
from grove.adc import ADC
class GroveRotaryAngleSensor(ADC):
def __init__(self, channel):
self.channel = channel
self.adc = ADC()
@property
def value(self):
return self.adc.read(self.channel)
Grove = GroveRotaryAngleSensor
def main():
if len(sys.argv) < 2:
print('使用方法: {} adc_channel'.format(sys.argv[0]))
sys.exit(1)
sensor = GroveRotaryAngleSensor(int(sys.argv[1]))
while True:
print('回転値: {}'.format(sensor.value))
time.sleep(.2)
if __name__ == '__main__':
main()
すべてが正常に動作すれば、以下の結果が表示されます。
pi@raspberrypi:~/grove.py/grove $ python3 grove_rotary_angle_sensor.py 0
回転値: 932
回転値: 931
回転値: 931
回転値: 931
回転値: 933
回転値: 931
回転値: 742
回転値: 666
回転値: 666
回転値: 549
回転値: 520
回転値: 499
回転値: 430
回転値: 430
回転値: 321
回転値: 286
回転値: 205
回転値: 127
回転値: 88
回転値: 0
回転値: 0
回転値: 0
回転値: 0
回転値: 0
回転値: 0
回転値: 0
^CTraceback (most recent call last):
File "grove_rotary_angle_sensor.py", line 66, in <module>
main()
File "grove_rotary_angle_sensor.py", line 62, in main
time.sleep(.2)
KeyboardInterrupt
このプログラムを終了するには、++ctrl+c++ を押してください。
アナログポートの場合、シルクスクリーンのピン番号は A0, A1 のようになっていますが、コマンドでは 0 や 1 を使用します。これはデジタルポートと同じです。そのため、モジュールを正しいポートに接続してください。そうしないとピンの競合が発生する可能性があります。
Raspberry Pi で遊ぶ (GrovePi_Plus を使用)
ハードウェア
- ステップ 1. 以下のものを準備してください:
| Raspberry pi | GrovePi_Plus | Grove-回転角センサー | Grove-LED |
|---|---|---|---|
|  | | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 2. GrovePi_Plus を Raspberry に接続します。
- ステップ 3. Grove-回転角センサーを GrovePi_Plus の A0 ポートに接続します。
- ステップ 4. Grove-LED を GrovePi_Plus の D5 ポートに接続します。
- ステップ 5. Raspberry を USB ケーブルで PC に接続します。

ソフトウェア
Raspberry Pi OS >= Bullseye を使用している場合は、Python3 のみでこのコマンドラインを使用してください。
- ステップ 1. ソフトウェアの設定 に従って開発環境を構成します。
- ステップ 2. GitHub リポジトリをクローンします。
cd ~
git clone https://github.com/DexterInd/GrovePi.git
- ステップ 3. 以下のコマンドを実行して音量を監視します。
cd ~/GrovePi/Software/Python
python3 grove_rotary_angle_sensor.py
以下は grove_rotary_angle_sensor.py のコードです。
import time
import grovepi
# Grove 回転角センサーをアナログポート A0 に接続
# SIG,NC,VCC,GND
potentiometer = 0
# LED をデジタルポート D5 に接続
# SIG,NC,VCC,GND
led = 5
grovepi.pinMode(potentiometer,"INPUT")
grovepi.pinMode(led,"OUTPUT")
time.sleep(1)
# ADC の基準電圧は 5V
adc_ref = 5
# Grove インターフェースの Vcc は通常 5V
grove_vcc = 5
# 回転角センサーの仕様に基づき、回転角の最大値は 300 度 (0 から 300)
full_angle = 300
while True:
try:
# ポテンショメータからセンサー値を読み取る
sensor_value = grovepi.analogRead(potentiometer)
# 電圧を計算
voltage = round((float)(sensor_value) * adc_ref / 1023, 2)
# 回転角を度数 (0 から 300) で計算
degrees = round((voltage * full_angle) / grove_vcc, 2)
# 回転角 (0 から 300) から LED の明るさ (0 から 255) を計算
brightness = int(degrees / full_angle * 255)
# LED に PWM 出力を与える
grovepi.analogWrite(led,brightness)
print("sensor_value = %d voltage = %.2f degrees = %.1f brightness = %d" %(sensor_value, voltage, degrees, brightness))
except KeyboardInterrupt:
grovepi.analogWrite(led,0)
break
except IOError:
print ("エラー")
- ステップ 4. Grove-回転角センサーを調整すると、Grove-LED の明るさが変化するのがわかります。
TI LaunchPad で遊ぶ
ポテンショメータ (回転角センサー) の読み取り
この例では、Grove ポテンショメータモジュールからのアナログ出力を読み取る方法を示します。この例では、いくつかの Grove モジュールを組み合わせて使用します!ポテンショメータのノブを回すことで、Grove 4 デジタルディスプレイにアナログ読み取り値を表示します。

/*
回転角センサー
Grove Base BoosterPack の J16 にあるアナログセンサーを読み取ることでアナログ入力を示します。ポテンショメータのノブの位置に応じて、LaunchPad 上の赤色 LED の速度が変化します。この例では、アナログ読み取り値を Grove 4 デジタルディスプレイに表示します。
回路:
* ポテンショメータをピン 24 (Grove Base BoosterPack の J6) に接続
* ポテンショメータの中央ピンをアナログピンに接続
* 一方のサイドピンをグランドに接続
* もう一方のサイドピンを VCC (3.3V) に接続
* 注意: 電圧の不安定性により、回転角センサーの値は触らなくても実行ごとにわずかに変化します。
作成者: Oliver Wang
この例のコードはパブリックドメインにあります。
https://www.seeedstudio.com/wiki/GROVE_-_Starter_Kit_v1.1b#Grove_-_Rotary_Angle_Sensor
*/
#include "TM1637.h"
/* マクロ定義 */
#define CLK 39 /* 4 デジタルディスプレイのクロックピン */
#define DIO 38 /* 4 デジタルディスプレイのデータピン */
#define ROTARY_ANGLE_P 24 /* 回転角センサーのピン */
/* グローバル変数 */
TM1637 tm1637(CLK, DIO); /* 4 デジタルディスプレイオブジェクト */
int analog_value = 0; /* 回転角センサーからの値を格納する変数 */
int8_t bits[4] = {0}; /* 値の各ビットを格納する配列 */
/* setup() メソッドはスケッチ開始時に 1 回実行されます */
void setup() {
/* 4 デジタルディスプレイを初期化 */
tm1637.init();
tm1637.set(BRIGHT_TYPICAL);
}
/* loop() メソッドは繰り返し実行されます */
void loop() {
analog_value = analogRead(ROTARY_ANGLE_P); /* センサーから値を読み取る */
memset(bits, 0, 4); /* 使用時に配列をリセット */
for(int i = 3; i >= 0; i--) {
/* アナログ値の各ビットを取得 */
bits[i] = analog_value % 10;
analog_value = analog_value / 10;
tm1637.display(i, bits[i]); /* 4 デジタルディスプレイに表示 */
}
delay(100);
}
Grove - Rotary Angle Sensor(P) v1.1 回路図ファイル
Grove-Rotary Angle Sensor v1.2 回路図ファイル
リソース
- [Eagle&PDF] Grove-Rotary Angle Sensor v1.2 回路図ファイル
- [Eagle&PDF] Grove - Rotary Angle Sensor(P) v1.1 回路図ファイル
- [ライブラリ] Rotary Angle SensorのGithubリポジトリ
- [Codecraft] CDCファイル
プロジェクト
Grove-Rotary Angle Sensor(P)を使用してGrove LEDを制御する: Arduino/Genuino 101を使用して、Grove-Rotary Angle Sensor(P)を介してLEDの明るさを制御します。
Rotary Angle Groveモジュール:
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験をスムーズにするために、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しています。