バッテリー管理チップ内蔵XIAO用Groveシールド

概要
Seeed Studio Grove Base for XIAOは、**Seeed Studio XIAO**用のプラグアンドプレイGrove拡張ボードです。オンボードのバッテリー管理チップとバッテリー接続パッドにより、Seeed Studio XIAOをリチウムバッテリーで簡単に電源供給し、充電することができます。8つのGroveコネクタがオンボードに搭載されており、2つのGrove I2Cと1つのUARTが含まれています。これはSeeed Studio XIAOとSeeedのGroveシステムの橋渡しとして機能します。Flash SPI接続パッドにより、Seeed Studio XIAOにFlashを追加してメモリ空間を拡張でき、Seeed Studio XIAOにより多くの可能性を提供します。
オンボードのバッテリー管理チップとバッテリー接続パッドにより、Seeed Studio XIAOをリチウム3.7Vバッテリーで簡単に電源供給し、充電することができ、プロジェクト、特にウェアラブルプロジェクトをより柔軟でポータブルにします。プロジェクトの実際のニーズに応じて、オンボードのPCBスタンプホールを通してボードを分割することもでき(分割後の寸法は25*39mmのみ)、より小さくし、重量も13gから10gに軽減されます!
拡張ボードとして、Seeed Studio Grove Base for XIAOはSeeed Studio XIAOから14のピンアウトをすべて引き出し、オンボードの電源スイッチと充電状態インジケーターライトにより、よりユーザーフレンドリーになっています。このシールドは、Seeed Studio XIAOにFlashを追加してメモリ空間を拡張する必要がある上級開発者のためにSPI-Flash接続パッドも確保しており、Seeed Studio XIAOにより多くの可能性を提供します。
Seeed Studio XIAOフォームファクターとして、すべてのSeeed Studio XIAOボードはGrove Shield for XIAOとSeeed Studio XIAO Expansion boardの両方をサポートします。ピン間にわずかな違いがあり、ピンアウトを参照すれば簡単に管理できます。
この製品にはSeeed Studio XIAOボードは含まれていません。必要な場合はこちらをクリックしてください。
ハードウェア概要
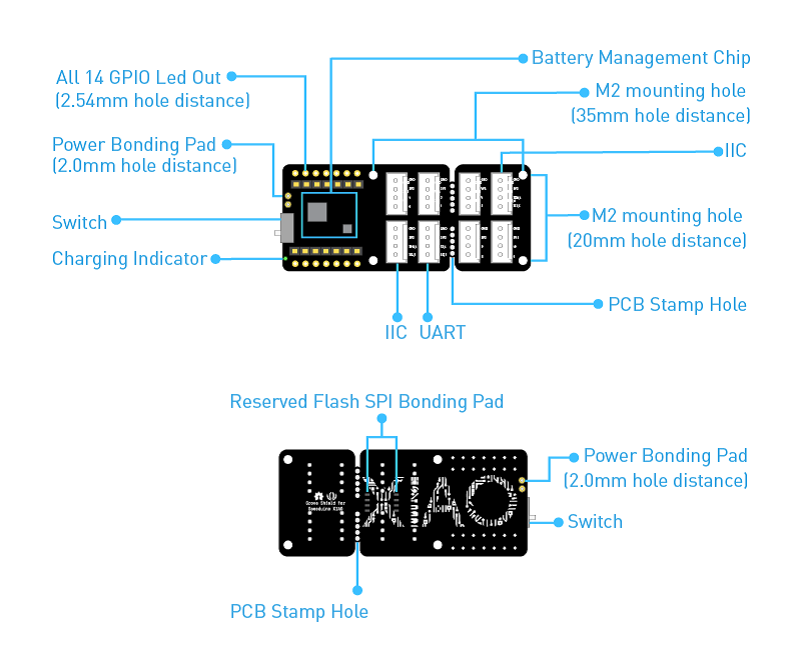
ピンアウト説明

機能
- オンボードリチウムバッテリー充電・管理機能
- Groveコネクタ(Grove IIC x 2、Grove UART x 1)、全14個のGPIOを引き出し
- コンパクトで分割可能な設計
- フラッシュSPIボンディングパッド予約済み
- オンボード電源スイッチと充電状態インジケーターライト
仕様
| 項目 | 値 |
|---|---|
| 動作電圧 | 3.3V / 3.7Vリチウムバッテリー |
| 負荷容量 | 800mA |
| 充電電流 | 500mA(最大) |
| 動作温度 | -40°C~85°C |
| 保存温度 | -55°C~150°C |
| Groveインターフェース | I2C 2 / UART 1 |
アプリケーション
- ウェアラブルデバイス
- ラピッドプロトタイピング
- Grove モジュールテスト
- 小型サイズが必要なプロジェクト
サポートプラットフォーム
| Arduino | Raspberry Pi |
|---|---|
|
|
はじめに
必要な材料
| Seeed Studio Seeed Studio XIAO | Grove-Doppler-Radar | Seeed Studio Grove Base for XIAO |
|---|---|---|
|
|
|
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |



Grove-Doppler Radarの外部ヘッダーピン説明

| ピン番号 | 信号名 | ピン説明 |
|---|---|---|
| 1 | DIV_OUT | BGT24LTR11からの分周器出力 |
| 2 | GND | グランド |
| 3 | VCC_5V_EXT | 外部+5.0V入力電源ピン(最大=5.5V) |
| 4 | VTUNE | VCO周波数調整電圧 |
| 5 | IFQ_HG | BGT24LTR11 Qチャンネルアナログ信号出力-第2ゲインステージ |
| 6 | IFI_HG | BGT24LTR11 Iチャンネルアナログ信号出力-第2ゲインステージ |
| 7 | PWM_OUT | CCU4を使用した外部ユーザー設定可能GPIO |
| 8 | OUT1 | 外部GPIOピン(ユーザー設定可能) |
| 9 | OUT2 | 外部GPIOピン(ユーザー設定可能) |
ハードウェア接続

USBケーブル、Doppler Radarインターフェースを Seeed Studio XIAO 拡張ボードインターフェースに優しく差し込んでください。そうしないとポートを損傷する可能性があります。
-
ステップ 1. Groveケーブルを使用してDoppler RadarをSeeed Studio XIAO拡張ボードに接続します。
-
ステップ 2. USBケーブルを使用してSeeed Studio XIAOをPCに接続します。
-
ステップ 3. コードをダウンロードします。ソフトウェア部分を参照してください。
-
ステップ 4. コードを実行すると、結果がArduino IDEのシリアルモニターの画面に表示されます。
ソフトウェア
Arduinoを初めて使用する場合は、開始前にGetting Started with Arduinoを参照することを強くお勧めします。
-
ステップ 1. デモコードをダウンロードします。
-
ステップ 2. Seeed_Arduino_DopplerRadarファイル全体をコピーして、Arduino IDEライブラリファイルに貼り付けます。
-
ステップ 3. Arduino IDEでBGT24LTR11_DETECTION_TARGETファイルを開きます。
-
ステップ 4. デモをアップロードします。コードのアップロード方法がわからない場合は、How to upload codeを確認してください。
ソフトウェアコード
#include "GBT24LTR11.h"
#ifdef __AVR__
#include <SoftwareSerial.h>
SoftwareSerial SSerial(2, 3); // RX, TX
#define COMSerial SSerial
#define ShowSerial Serial
GBT24LTR11<SoftwareSerial> GBT;
#endif
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define COMSerial Serial1
#define ShowSerial SerialUSB
GBT24LTR11<Uart> GBT;
#endif
#ifdef ARDUINO_ARCH_STM32F4
#define COMSerial Serial
#define ShowSerial SerialUSB
GBT24LTR11<HardwareSerial> GBT;
#endif
void setup() {
// put your setup code here, to run once:
ShowSerial.begin(9600);
COMSerial.begin(115200);
GBT.init(COMSerial);
while (!ShowSerial)
;
while (!COMSerial)
;
/*
MODE 0 -->detection target mode
MODE 1 -->I/Q ADC mode
*/
while (!GBT.setMode(0))
;
}
void loop() {
// put your main code here, to run repeatedly:
uint16_t state = 0;
ShowSerial.print("target speed:");
ShowSerial.println(GBT.getSpeed());
state = GBT.getTargetState();
//2 --> target approach
//1 --> target leave
//0 --> Not Found target
if (state == 2) {
ShowSerial.println("target approach");
} else if (state == 1) {
ShowSerial.println("target leave");
}
delay(200);
}
すべてが順調に進めば、シリアルモニターで以下のような結果を確認できます:

レーダーに物体が接近したり通り過ぎたりすると、結果は以下のように変化します:

センサーが検出可能な最小速度精度は52cm/sで、これは0.52m/s、3.6km/h、2.23mphに相当します。さらに、getSpeed()関数によって返される結果は52cm/sの倍数であり、絶対値として表示されます。
回路図オンラインビューア
リソース
- [ZIP] Seeed Studio Grove Base for XIAO の添付ファイル
- [ZIP] デモコードライブラリ
- [PDF] Grove DopplerRadar (BGT24LTR11) レーダーモジュール通信プロトコル v1.1.pdf
- [PDF] ETA 3410 データシート
プロジェクト
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。