Grove - TF Mini LiDAR

この製品はToF(Time of Flight)原理に基づいており、独自の光学設計と電気設計を統合することで、安定性、精度、高感度、高速の距離検出を実現しています。
ToFはTime of Flight技術の略で、その動作原理は以下の通りです。センサーから変調された近赤外線が送信され、物体によって反射されます。光の送信と反射の間の時間差または位相差を計算することで、センサーは撮影対象物までの距離を変換し、深度情報を生成します。

レンズにほこりやその他の異物が入らないようにしてください。光の透過に影響を与える可能性があります。
バージョン
| 製品バージョン | 変更点 | リリース日 |
|---|---|---|
| Grove-TF Mini LiDAR V1.0 | 初版 | 2017年11月 |
仕様
| 製品名 | TFmini |
|---|---|
| 動作範囲 | 0.3m-12m |
| 10%反射率での最大動作範囲 | 5m |
| 平均消費電力 | 0.6W |
| 適用電圧範囲 | 4.5V-6V |
| 受光角度 | 2.3° |
| 最小分解能 | 1cm |
| 周波数 | 100Hz |
| 精度 | 1%(6m未満)、2%(6m-12m) |
| 距離検出単位 | cm |
| 波長 | 850nm |
| サイズ | 42mm×15mm×16mm |
| 動作温度 | -20℃-60℃ |
| 光感度 | 70,000lux |
| 重量 | 4.7g |
| 通信インターフェース | UART 115200 |
| LEDピーク電流 | 800ma |
| シリアルポートTTL電圧レベル | 3.3V |
| 電磁適合性(EMC) | EN 55032 Class B |
Groveモジュールの詳細については、Grove Systemを参照してください。
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応可能とされているプラットフォームは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することは不可能です。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoで遊ぶ
ハードウェア
- ステップ 1. 以下のアイテムを準備してください:
| Seeeduino V4.2 | Base Shield | Grove-TF Mini LiDAR |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
-
ステップ 2. Grove-TF-Mini-LiDARをBase ShieldのD2ポートに接続し、SeeeduinoをUSBケーブルを介してPCに接続します。
-
ステップ 3. デモコードをダウンロードし、Seeed_Arduino_TFlidarファイル全体をArduino IDEのライブラリファイルにコピーして貼り付けます。

ソフトウェア
- ステップ 1. Grove-TF Mini LiDARは16進数の出力データです。各フレームデータは9バイトでエンコードされており、1つの距離データ(Dist)が含まれています。各距離データには対応する信号強度情報(Strength)があります。フレームの終わりはデータのパリティビットです。
| バイト | データエンコードの解釈 |
|---|---|
| Byte1 | 0x59, フレームヘッダー、すべてのフレームで同じ |
| Byte2 | 0x59, フレームヘッダー、すべてのフレームで同じ |
| Byte3 | Dist_L 距離値の下位8ビット。 |
| Byte4 | Dist_H 距離値の上位8ビット。 |
| Byte5 | Strength_L の下位8ビット。 |
| Byte6 | Strength_H の上位8ビット。 |
| Byte7 | 統合時間。 |
| Byte8 | 予約バイト。 |
| Byte9 | チェックサムパリティ。 |
- ステップ 2. 以下のコードをArduino IDEにコピーしてアップロードします。
#include "TFLidar.h"
#define USETFMINI
// #define USETFLUNA
#define SERIAL Serial
#if defined(SEEED_XIAO_M0)
#define uart Serial1
#elif defined(SEEED_WIO_TERMINAL)
#define uart Serial1
#else
SoftwareSerial uart(2, 3);
#endif
#ifdef USETFLUNA
TFLuna SeeedTFLuna;
TFLidar SeeedTFLidar(&SeeedTFLuna);
#endif
#ifdef USETFMINI
TFMini SeeedTFMini;
TFLidar SeeedTFLidar(&SeeedTFMini);
#endif
void setup() {
// 初期設定コード
SERIAL.begin(9600);
while(!Serial);
SeeedTFLidar.begin(&uart,115200);
}
void loop() {
while(!SeeedTFLidar.get_frame_data()){
delay(1);
}
// メインコード
SERIAL.print("dist = ");
SERIAL.print(SeeedTFLidar.get_distance()); // LiDARの測定距離値を出力
SERIAL.print('\t');
SERIAL.print("strength = ");
SERIAL.print(SeeedTFLidar.get_strength()); // 信号強度値を出力
#ifdef USETFLUNA
SERIAL.print("\t Chip Temprature = ");
SERIAL.print(SeeedTFLidar.get_chip_temperature());
SERIAL.print(" celcius degree"); // LiDARのチップ温度を出力
#endif
SERIAL.println(" ");
// delay(1000);
}
- ステップ 3. ターミナルに距離が表示されます。青い曲線が距離を示し、赤が信号強度を示します。

デモコードで距離のみが必要な場合は、41行目から43行目を削除することができます:
SERIAL.print("strength = ");
SERIAL.print(SeeedTFLidar.get_strength()); // 信号強度値を出力
Wio Terminalで遊ぶ
ハードウェア
| Wio Terminal | Grove-TF-Mini-LiDAR | ジャンパー |
|---|---|---|
 | |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
ハードウェア接続

ピン配置

Wio Terminalとジャンパーを接続する前に、上記のピン配置説明を参照してください。
ステップ 1 Grove-TF-Mini-LiDARをジャンパーを介してWio Terminalに接続し、Wio TerminalをUSBケーブルを介してPCに接続します。
ステップ 2 デモコードをダウンロードし、Seeed_Arduino_Linechartファイル全体をArduino IDEのライブラリファイルにコピーして貼り付けます。
ステップ 3 デモコードをArduino IDEにコピーします。
ソフトウェア
#include"seeed_line_chart.h" // ライブラリをインクルード
#include "TFLidar.h"
#define LINE_DIS 0X00
#define STRING_DIS 0X01
TFMini SeeedTFMini;
TFLidar SeeedTFLidar(&SeeedTFMini);
#define uart Serial1
TFT_eSPI tft;
#define max_size 10 // データの最大サイズ
doubles data; // データを格納するためのdoubles型を初期化
TFT_eSprite spr = TFT_eSprite(&tft); // スプライト
void setup() {
Serial.begin(115200);
pinMode(WIO_KEY_C, INPUT_PULLUP);
tft.begin();
tft.setRotation(3);
spr.createSprite(TFT_HEIGHT,TFT_WIDTH);
SeeedTFLidar.begin(&uart,115200);
}
uint8_t mode = LINE_DIS;
void loop() {
if (digitalRead(WIO_KEY_C) == LOW) {
mode ++;
if(mode > STRING_DIS ) mode = LINE_DIS;
while(!digitalRead(WIO_KEY_C));
}
display(get_Lidar_data(),mode);
delay(50);
}
uint16_t get_Lidar_data()
{
while(!SeeedTFLidar.get_frame_data()){
delay(1);
}
return SeeedTFLidar.get_distance();
}
void display(uint16_t lidar_data,uint8_t mode){
spr.fillSprite(TFT_WHITE);
// ライングラフタイトルの設定
auto header = text(0, 0)
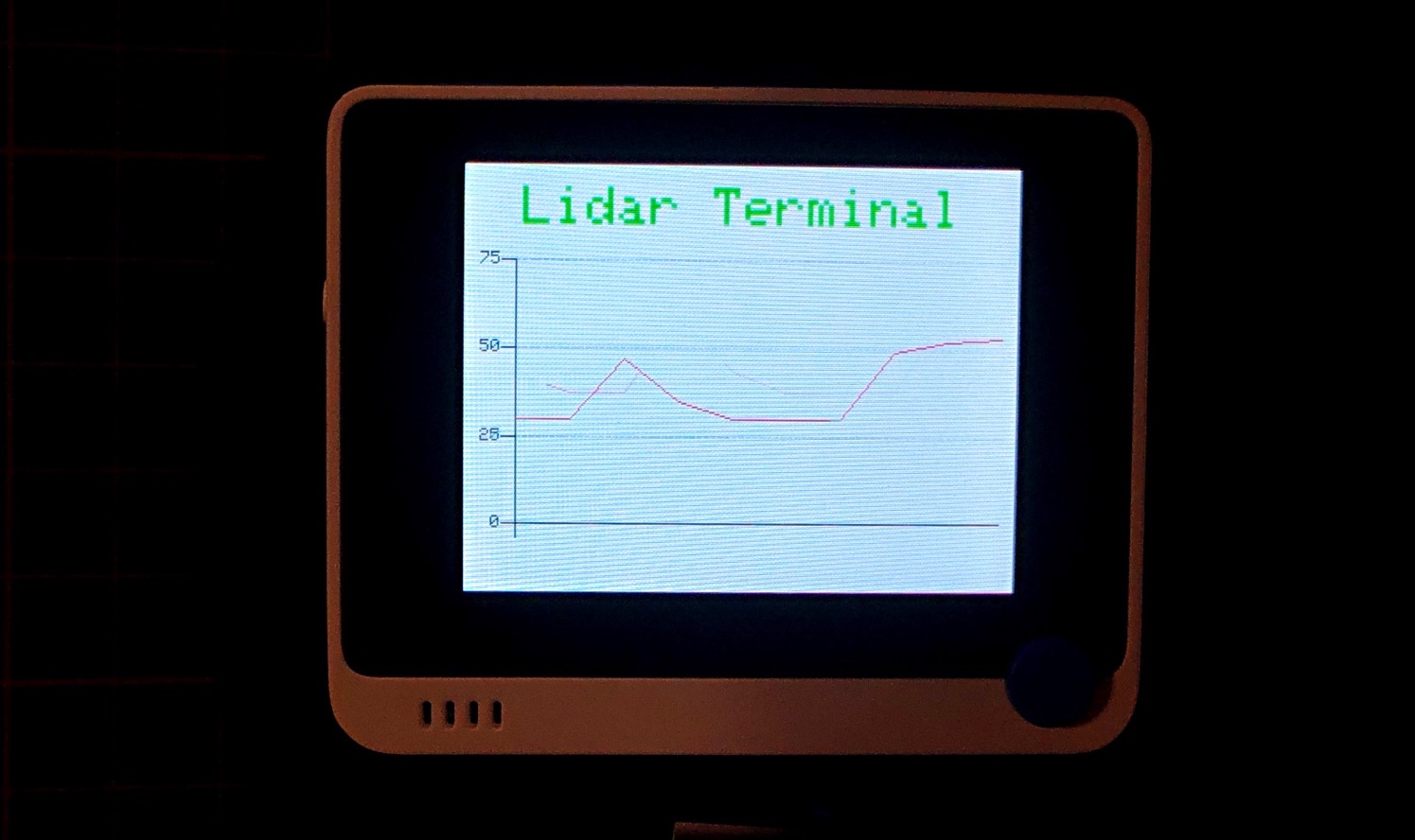
.value("Lidar Terminal")
.align(center)
.valign(vcenter)
.width(tft.width())
.color(green)
.thickness(3);
header.height(header.font_height() * 2);
header.draw(); // ヘッダーの高さはフォントの高さの2倍
if (LINE_DIS == mode){
if (data.size() == max_size) {
data.pop();// 最初の読み取り変数を削除
}
data.push(lidar_data); // 変数を読み取りデータに格納
// ライングラフの設定
auto content = line_chart(10, header.height()); //(x,y) ライングラフの開始位置
content
.height(tft.height() - header.height() * 1.5) // ラインチャートの実際の高さ
.width(tft.width() - content.x() * 2) // ラインチャートの実際の幅
.based_on(0.0) // y軸の開始点、float型で指定
.show_circle(false) // 各ポイントに円を描画、デフォルトはオン
.value(data) // データをラインチャートに渡す
.color(TFT_RED) // ラインの色を設定
.draw();
}
else if (STRING_DIS == mode){
for(int8_t line_index = 0;line_index < 5 ; line_index++)
{
spr.drawLine(0, 50 + line_index, tft.width(), 50 + line_index, TFT_GREEN);
}
auto header = text(0, 0)
.thickness(1);
spr.setFreeFont(&FreeSansBoldOblique24pt7b);
spr.setTextColor(TFT_BLUE);
spr.drawFloat(lidar_data / 100.00,2,80,110);
spr.drawString(" M",80 + 90,110,1);
}
spr.pushSprite(0, 0);
}
すべてが正常に動作している場合、以下のような画像が Wio Terminal の画面に表示されます。
リソース
- [データシート] Grove-TF-Mini-LiDAR
- [データシート] Grove-TF-Luna-LiDAR
- [ZIP] Seeed_Arduino_TFlidar
- [ZIP] Seeed_Arduino_Linechart
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルを用意しています。