Grove - サーマルイメージングカメラ IRアレイ MLX90641
このIRサーマルカメラは、16x12のサーマルセンサーアレイ (MLX90641) を搭載しており、中心エリアで±1℃、平均で±1.5℃の精度で遠距離の物体の温度を検出できます。サーマル画像を簡単に取得するために、I2Cプロトコルを使用してカメラから低解像度の画像を取得します。このカメラの視野角(FOV)は110°x75°で、温度測定範囲は-40℃から300℃です。サーマル画像を簡単に取得するために、I2Cプロトコルを使用してカメラから低解像度の画像を取得します。
一方、Grove - サーマルイメージングカメラはサーマルセンサー (MLX90640) を搭載しており、32x24のサーマルセンサーアレイを持ち、±1.5℃の精度で数フィート離れた物体の温度を検出し、動的なサーマル画像を表示し、周囲温度を-40℃から300℃まで検出できます。狭角/広角のカメラは、視野角(FOV)が55°x35°/110°x75°です。サーマル画像を簡単に取得するために、I2Cプロトコルを使用してカメラから低解像度の画像を取得します。
バージョン
| バージョン | リリース日 | 注文 |
|---|---|---|
| Grove - サーマルイメージングカメラ / IRアレイ MLX90641 110度 [新] | 2020年6月3日 | 購入する |
| Grove - サーマルイメージングカメラ / IRアレイ MLX90640 110度 | 2019年11月12日 | 購入する |
このWikiは、サーマルイメージングカメラIRアレイMLX90641およびMLX90640の両方に対応しています。
特徴
- コンパクトサイズの16x12ピクセルIRサーマルセンサーアレイ(MLX90641)、32x24ピクセルIRサーマルセンサーアレイ(MLX90640)
- 広い視野角(FOV)110°x75°で広範囲をキャプチャ
- 広い温度測定範囲(-40℃~300℃)
- MCUとの簡単な通信を可能にするI2C Groveインターフェース
- セットアップが簡単な完全校正済みIRアレイ
仕様
| 項目 | Grove - サーマルイメージングカメラ - MLX90640 | Grove - サーマルイメージングカメラ - MLX90641 |
|---|---|---|
| サーマルセンサー | 32x24アレイ MLX90640 | 16x12アレイ MLX90641 |
| 動作電圧 | 3.3V - 5V | 3.3V - 5V |
| 消費電流 | 約18mA | 約18mA |
| 視野角(FOV) | 110°x75° | 110°x75° |
| 温度測定範囲 | -40°C - 300°C | -40°C - 300°C |
| 温度分解能 | ± 1.5°C | ± 1.5°C(中心エリアで±1℃) |
| リフレッシュレート | 0.5Hz - 64Hz | 0.5Hz - 64Hz |
| インターフェース | I2C Groveインターフェース | I2C Groveインターフェース |
| I2Cアドレス | 0x33 | 0x33 |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
はじめに
Wio Terminal を使用した開始方法
必要な材料
| Wio Terminal | Grove - Thermal Imaging Camera / IR Array MLX90641 110度 |
|---|---|
 |  |
| 今すぐ購入 | 今すぐ購入 |
ハードウェア接続

ステップ 1. Groveケーブルを使用してGrove - Thermal Imaging CameraをWio Terminalに接続し、USBケーブルを介してWio TerminalをPCに接続します。
ステップ 2. ライブラリをダウンロードし、Seeed_Arduino_MLX9064xファイル全体をArduino IDEのライブラリフォルダにコピーして貼り付けます。
初めてWio Terminalを使用する場合、どのインターフェースに接続するか分からない場合は、**Wio Terminalの使い方**を参照してください。
ステップ 3. 以下のソフトウェアコード1をArduino IDEにコピーし、アップロードしてシリアルポートを介した視覚化形式を表示します。
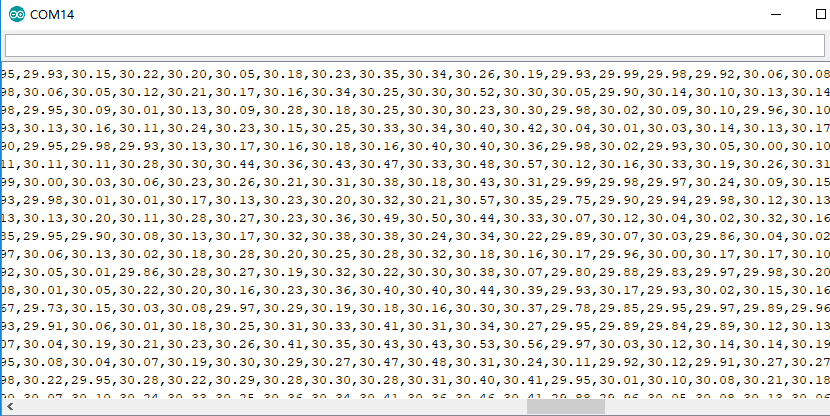
視覚化形式の結果
ソフトウェアコード1
/*
温度読み取り値をすべてのピクセルに出力し、Processingビジュアライザーで読み取れるようにします
*/
#include <Wire.h>
#define USE_MLX90641
#ifndef USE_MLX90641
#include "MLX90640_API.h"
#else
#include "MLX90641_API.h"
#endif
#include "MLX9064X_I2C_Driver.h"
#if defined(ARDUINO_ARCH_AVR)
#define debug Serial
#elif defined(ARDUINO_ARCH_SAMD) || defined(ARDUINO_ARCH_SAM)
#define debug Serial
#else
#define debug Serial
#endif
#ifdef USE_MLX90641
const byte MLX90641_address = 0x33; //MLX90641のデフォルトの7ビット未シフトアドレス
#define TA_SHIFT 8 //MLX90641のデフォルトのオープンエアシフト
uint16_t eeMLX90641[832];
float MLX90641To[192];
uint16_t MLX90641Frame[242];
paramsMLX90641 MLX90641;
int errorno = 0;
#else
const byte MLX90640_address = 0x33; //MLX90640のデフォルトの7ビット未シフトアドレス
#define TA_SHIFT 8 //MLX90640のデフォルトのオープンエアシフト
float mlx90640To[768];
paramsMLX90640 mlx90640;
#endif
void setup() {
Wire.begin();
Wire.setClock(400000); //I2Cクロック速度を400kHzに増加
debug.begin(115200); //可能な限り高速なデバッグ
while (!debug); //ユーザーがターミナルを開くのを待つ
//debug.println("MLX90640 IR Array Example");
#ifndef USE_MLX90641
if (isConnected() == false) {
debug.println("MLX9064xがデフォルトのI2Cアドレスで検出されません。配線を確認してください。停止します。");
while (1);
}
//デバイスパラメータを取得 - これを一度だけ行う必要があります
int status;
uint16_t eeMLX90640[832];
status = MLX90640_DumpEE(MLX90640_address, eeMLX90640);
if (status != 0) {
debug.println("システムパラメータのロードに失敗しました");
}
status = MLX90640_ExtractParameters(eeMLX90640, &mlx90640);
if (status != 0) {
debug.println("パラメータ抽出に失敗しました");
}
//パラメータが抽出されたら、eeMLX90640配列を解放できます
//MLX90640_SetRefreshRate(MLX90640_address, 0x02); //2Hzに設定
MLX90640_SetRefreshRate(MLX90640_address, 0x03); //4Hzに設定
//MLX90640_SetRefreshRate(MLX90640_address, 0x07); //64Hzに設定
#else
if (isConnected() == false) {
debug.println("MLX90641がデフォルトのI2Cアドレスで検出されません。配線を確認してください。停止します。");
while (1);
}
//デバイスパラメータを取得 - これを一度だけ行う必要があります
int status;
status = MLX90641_DumpEE(MLX90641_address, eeMLX90641);
errorno = status;//MLX90641_CheckEEPROMValid(eeMLX90641);//eeMLX90641[10] & 0x0040;//
if (status != 0) {
debug.println("システムパラメータのロードに失敗しました");
while(1);
}
status = MLX90641_ExtractParameters(eeMLX90641, &MLX90641);
//errorno = status;
if (status != 0) {
debug.println("パラメータ抽出に失敗しました");
while(1);
}
//パラメータが抽出されたら、eeMLX90641配列を解放できます
//MLX90641_SetRefreshRate(MLX90641_address, 0x02); //2Hzに設定
MLX90641_SetRefreshRate(MLX90641_address, 0x03); //4Hzに設定
//MLX90641_SetRefreshRate(MLX90641_address, 0x07); //64Hzに設定
#endif
}
void loop() {
#ifndef USE_MLX90641
long startTime = millis();
for (byte x = 0 ; x < 2 ; x++) {
uint16_t mlx90640Frame[834];
int status = MLX90640_GetFrameData(MLX90640_address, mlx90640Frame);
float vdd = MLX90640_GetVdd(mlx90640Frame, &mlx90640);
float Ta = MLX90640_GetTa(mlx90640Frame, &mlx90640);
float tr = Ta - TA_SHIFT; //センサー周囲温度に基づく反射温度
float emissivity = 0.95;
MLX90640_CalculateTo(mlx90640Frame, &mlx90640, emissivity, tr, mlx90640To);
}
long stopTime = millis();
for (int x = 0 ; x < 768 ; x++) {
//if(x % 8 == 0) debug.println();
debug.print(mlx90640To[x], 2);
debug.print(",");
}
debug.println("");
#else
long startTime = millis();
for (byte x = 0 ; x < 2 ; x++) {
int status = MLX90641_GetFrameData(MLX90641_address, MLX90641Frame);
float vdd = MLX90641_GetVdd(MLX90641Frame, &MLX90641);
float Ta = MLX90641_GetTa(MLX90641Frame, &MLX90641);
float tr = Ta - TA_SHIFT; //センサー周囲温度に基づく反射温度
float emissivity = 0.95;
MLX90641_CalculateTo(MLX90641Frame, &MLX90641, emissivity, tr, MLX90641To);
}
long stopTime = millis();
/*
debug.print("vdd=");
debug.print(vdd,2);
debug.print(",Ta=");
debug.print(Ta,2);
debug.print(",errorno=");
debug.print(errorno,DEC);
for (int x = 0 ; x < 64 ; x++) {
debug.print(MLX90641Frame[x], HEX);
debug.print(",");
}
delay(1000);
*/
for (int x = 0 ; x < 192 ; x++) {
debug.print(MLX90641To[x], 2);
debug.print(",");
}
debug.println("");
#endif
}
//I2Cバス上でMLX90640が検出された場合にtrueを返します
boolean isConnected() {
#ifndef USE_MLX90641
Wire.beginTransmission((uint8_t)MLX90640_address);
#else
Wire.beginTransmission((uint8_t)MLX90641_address);
#endif
if (Wire.endTransmission() != 0) {
return (false); //センサーがACKしませんでした
}
return (true);
}
上記のソフトウェアコード1をArduino IDEにアップロードし、シリアルポートを開くと、以下のような視覚化形式の結果が表示されます:
Wio Terminalでの視覚化結果
ステップ4. 以下のソフトウェアコード2をArduino IDEにアップロードして、Wio Terminalに視覚化を表示します。
ソフトウェアコード2
#include <Wire.h>
#include "MLX90641_API.h"
#include "MLX9064X_I2C_Driver.h"
#include <TFT_eSPI.h> // グラフィックスライブラリをインクルード(これにはスプライト機能が含まれます)
const byte MLX90641_address = 0x33; // MLX90641のデフォルトの7ビット未シフトアドレス
#define TA_SHIFT 12 // 開放空間でのMLX90641のデフォルトシフト
#define debug Serial
uint16_t eeMLX90641[832];
float MLX90641To[192];
uint16_t MLX90641Frame[242];
paramsMLX90641 MLX90641;
int errorno = 0;
TFT_eSPI tft = TFT_eSPI();
TFT_eSprite Display = TFT_eSprite(&tft); // "tft"オブジェクトへのポインタを持つスプライトオブジェクト"img"を作成
// ポインタはpushSprite()によってTFTにプッシュされます
unsigned long CurTime;
uint16_t TheColor;
// 初期色を設定
uint16_t MinTemp = 25;
uint16_t MaxTemp = 38;
// 補間された色の変数
byte red, green, blue;
// 行/列補間の変数
byte i, j, k, row, col, incr;
float intPoint, val, a, b, c, d, ii;
byte aLow, aHigh;
// 表示「ピクセル」のサイズ
byte BoxWidth = 3;
byte BoxHeight = 3;
int x, y;
char buf[20];
// 表示グリッドを切り替える変数
int ShowGrid = -1;
// 補間された配列用の配列
float HDTemp[6400];
void setup() {
Wire.begin();
Wire.setClock(2000000); // I2Cクロック速度を2Mに増加
debug.begin(115200); // 可能な限り高速なデバッグ
// ディスプレイを開始し、背景を黒に設定
if (isConnected() == false) {
debug.println("MLX90641がデフォルトのI2Cアドレスで検出されません。配線を確認してください。停止します。");
while (1);
}
// デバイスパラメータを取得 - これは一度だけ行う必要があります
int status;
status = MLX90641_DumpEE(MLX90641_address, eeMLX90641);
errorno = status; // MLX90641_CheckEEPROMValid(eeMLX90641);//eeMLX90641[10] & 0x0040;//
if (status != 0) {
debug.println("システムパラメータの読み込みに失敗しました");
while(1);
}
status = MLX90641_ExtractParameters(eeMLX90641, &MLX90641);
// errorno = status;
if (status != 0) {
debug.println("パラメータ抽出に失敗しました");
while(1);
}
// パラメータが抽出されたら、eeMLX90641配列を解放できます
MLX90641_SetRefreshRate(MLX90641_address, 0x05); // レートを16Hzに設定
tft.begin();
tft.setRotation(3);
tft.fillScreen(TFT_BLACK);
Display.createSprite(TFT_HEIGHT, TFT_WIDTH);
Display.fillSprite(TFT_BLACK);
// カラー補間ルーチンのカットオフポイントを取得
// この関数は温度スケールが変更されたときに呼び出されます
Getabcd();
// センサーの最大値と最小値に一致するスケールで凡例を描画
DrawLegend();
}
void loop() {
// 温度エリアの大きな白い枠を描画
Display.fillRect(10, 10, 220, 220, TFT_WHITE);
for (byte x = 0 ; x < 2 ; x++) {
int status = MLX90641_GetFrameData(MLX90641_address, MLX90641Frame);
float vdd = MLX90641_GetVdd(MLX90641Frame, &MLX90641);
float Ta = MLX90641_GetTa(MLX90641Frame, &MLX90641);
float tr = Ta - TA_SHIFT; // センサー周囲温度に基づく反射温度
float emissivity = 0.95;
MLX90641_CalculateTo(MLX90641Frame, &MLX90641, emissivity, tr, MLX90641To);
}
interpolate_image(MLX90641To,12,16,HDTemp,80,80);
// 80 x 80配列を表示
DisplayGradient();
// 画面中央にクロスヘアを描画
Display.drawCircle(115, 115, 5, TFT_WHITE);
Display.drawFastVLine(115, 105, 20, TFT_WHITE);
Display.drawFastHLine(105, 115, 20, TFT_WHITE);
// 画面中央の温度を表示
// スプライトを画面にプッシュ
Display.pushSprite(0, 0);
tft.setRotation(3);
tft.setTextColor(TFT_WHITE);
tft.drawFloat(HDTemp[35 * 80 + 35], 2, 90, 20);
}
// MLX90640がI2Cバス上で検出された場合にtrueを返します
boolean isConnected() {
Wire.beginTransmission((uint8_t)MLX90641_address);
if (Wire.endTransmission() != 0) {
return (false); // センサーがACKを返さなかった
}
return (true);
}
// 結果を表示する関数
void DisplayGradient() {
tft.setRotation(4);
// 70行を高速に処理
for (row = 0; row < 70; row ++) {
// 高速な非フリッカーグリッド描画方法 - 10ごとにMLX90641Toを2x2にする
if (ShowGrid < 0) {
BoxWidth = 3;
}
else {
if ((row % 10 == 9) ) {
BoxWidth = 2;
}
else {
BoxWidth = 3;
}
}
// 次に70列を高速に処理
for (col = 0; col < 70; col++) {
// 高速な非フリッカーグリッド描画方法 - 10ごとにMLX90641Toを2x2にする
if (ShowGrid < 0) {
BoxHeight = 3;
}
else {
if ( (col % 10 == 9)) {
BoxHeight = 2;
}
else {
BoxHeight = 3;
}
}
// 最後に70 x 70ポイントを描画、補間された色を取得する呼び出しに注意
Display.fillRect((row * 3) + 15, (col * 3) + 15, BoxWidth, BoxHeight, GetColor(HDTemp[row * 80 + col]));
}
}
}
// 高速かつ効果的なカラー補間ルーチン
uint16_t GetColor(float val) {
/*
値を渡してR G Bを計算
公開されているいくつかの方法に基づき、R G Bをグラフ化し、単純な線形方程式を開発
5-6-5カラー表示では正確な温度からR G Bへの色計算は不要
以下のリンクに基づく方程式
http://web-tech.ga-usa.com/2012/05/creating-a-custom-hot-to-cold-temperature-color-gradient-for-use-with-rrdtool/index.html
*/
red = constrain(255.0 / (c - b) * val - ((b * 255.0) / (c - b)), 0, 255);
if ((val > MinTemp) & (val < a)) {
green = constrain(255.0 / (a - MinTemp) * val - (255.0 * MinTemp) / (a - MinTemp), 0, 255);
}
else if ((val >= a) & (val <= c)) {
green = 255;
}
else if (val > c) {
green = constrain(255.0 / (c - d) * val - (d * 255.0) / (c - d), 0, 255);
}
else if ((val > d) | (val < a)) {
green = 0;
}
if (val <= b) {
blue = constrain(255.0 / (a - b) * val - (255.0 * b) / (a - b), 0, 255);
}
else if ((val > b) & (val <= d)) {
blue = 0;
}
else if (val > d) {
blue = constrain(240.0 / (MaxTemp - d) * val - (d * 240.0) / (MaxTemp - d), 0, 240);
}
// ディスプレイのカラーマッピング関数を使用して5-6-5カラーパレットを取得(R=5ビット、G=6ビット、B=5ビット)
return Display.color565(red, green, blue);
}
// 温度対RGBグラフのカットオフポイントを取得する関数
void Getabcd() {
a = MinTemp + (MaxTemp - MinTemp) * 0.2121;
b = MinTemp + (MaxTemp - MinTemp) * 0.3182;
c = MinTemp + (MaxTemp - MinTemp) * 0.4242;
d = MinTemp + (MaxTemp - MinTemp) * 0.8182;
}
float get_point(float *p, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
if (x < 0)
{
x = 0;
}
if (y < 0)
{
y = 0;
}
if (x >= cols)
{
x = cols - 1;
}
if (y >= rows)
{
y = rows - 1;
}
return p[y * cols + x];
}
void set_point(float *p, uint8_t rows, uint8_t cols, int8_t x, int8_t y, float f)
{
if ((x < 0) || (x >= cols))
{
return;
}
if ((y < 0) || (y >= rows))
{
return;
}
p[y * cols + x] = f;
}
// srcはsrc_rows * src_colsのグリッド
// destは事前に割り当てられたグリッド、dest_rows*dest_cols
void interpolate_image(float *src, uint8_t src_rows, uint8_t src_cols,
float *dest, uint8_t dest_rows, uint8_t dest_cols)
{
float mu_x = (src_cols - 1.0) / (dest_cols - 1.0);
float mu_y = (src_rows - 1.0) / (dest_rows - 1.0);
float adj_2d[16]; // 隣接要素を格納する行列
for (uint8_t y_idx = 0; y_idx < dest_rows; y_idx++)
{
for (uint8_t x_idx = 0; x_idx < dest_cols; x_idx++)
{
float x = x_idx * mu_x;
float y = y_idx * mu_y;
get_adjacents_2d(src, adj_2d, src_rows, src_cols, x, y);
float frac_x = x - (int)x; // ポイント間の~差分~のみが必要
float frac_y = y - (int)y; // ポイント間の~差分~のみが必要
float out = bicubicInterpolate(adj_2d, frac_x, frac_y);
set_point(dest, dest_rows, dest_cols, x_idx, y_idx, out);
}
}
}
// pは4ポイントのリスト、左右に2つずつ
float cubicInterpolate(float p[], float x)
{
float r = p[1] + (0.5 * x * (p[2] - p[0] + x * (2.0 * p[0] - 5.0 * p[1] + 4.0 * p[2] - p[3] + x * (3.0 * (p[1] - p[2]) + p[3] - p[0]))));
return r;
}
// pは16ポイントの4x4配列、上下左右に2行/列
float bicubicInterpolate(float p[], float x, float y)
{
float arr[4] = {0, 0, 0, 0};
arr[0] = cubicInterpolate(p + 0, x);
arr[1] = cubicInterpolate(p + 4, x);
arr[2] = cubicInterpolate(p + 8, x);
arr[3] = cubicInterpolate(p + 12, x);
return cubicInterpolate(arr, y);
}
// srcはrows*colsで、destは事前に割り当てられた4ポイント配列
void get_adjacents_1d(float *src, float *dest, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
// 左側の2つのアイテムを選択
dest[0] = get_point(src, rows, cols, x - 1, y);
dest[1] = get_point(src, rows, cols, x, y);
// 右側の2つのアイテムを選択
dest[2] = get_point(src, rows, cols, x + 1, y);
dest[3] = get_point(src, rows, cols, x + 2, y);
}
// srcはrows*colsで、destは事前に割り当てられた16ポイント配列
void get_adjacents_2d(float *src, float *dest, uint8_t rows, uint8_t cols, int8_t x, int8_t y)
{
float arr[4];
for (int8_t delta_y = -1; delta_y < 3; delta_y++)
{ // -1, 0, 1, 2
float *row = dest + 4 * (delta_y + 1); // 各4チャンクへのインデックス
for (int8_t delta_x = -1; delta_x < 3; delta_x++)
{ // -1, 0, 1, 2
row[delta_x + 1] = get_point(src, rows, cols, x + delta_x, y + delta_y);
}
}
}
// 凡例を描画する関数
void DrawLegend() {
// カラー凡例と最大値・最小値のテキスト
j = 0;
float inc = (MaxTemp - MinTemp ) / 160.0;
for (ii = MinTemp; ii < MaxTemp; ii += inc) {
tft.drawFastHLine(260, 200 - j++, 30, GetColor(ii));
}
tft.setTextSize(2);
tft.setCursor(245, 20);
tft.setTextColor(TFT_WHITE, TFT_BLACK);
sprintf(buf, "%2d/%2d", MaxTemp, (int) (MaxTemp * 1.12) + 32);
tft.print(buf);
tft.setTextSize(2);
tft.setCursor(245, 210);
tft.setTextColor(TFT_WHITE, TFT_BLACK);
sprintf(buf, "%2d/%2d", MinTemp, (int) (MinTemp * 1.12) + 32);
tft.print(buf);
}
すべてが正常に動作すれば、Wio Terminal の画面に可視化結果が表示されます。
Raspberry Pi を使った開始手順
ハードウェア
必要な材料
| Raspberry Pi 4 | Grove Base Hat for Raspberry Pi | Grove - Thermal Imaging Camera / IR Array MLX90641 110度 |
|---|---|---|
 |  | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
ハードウェア接続
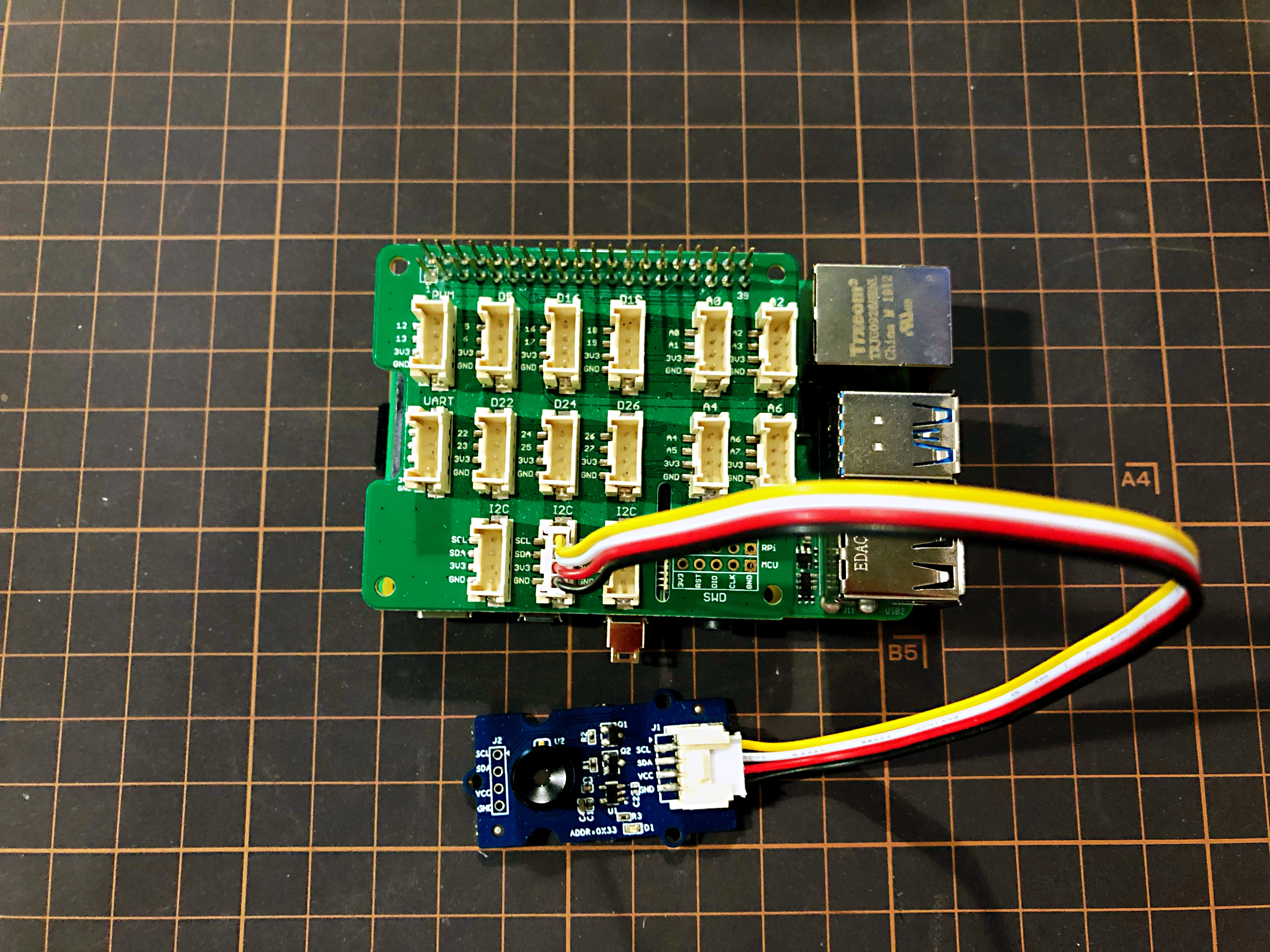
- ステップ 1 Grove - Thermal Imaging Camera を 2つの I2C ポートのいずれかに接続します。
- ステップ 2 Raspberry Pi 4 を Grove Base Hat for Raspberry Pi に差し込みます。
- ステップ 3 Raspberry Pi を HDMI ケーブルでディスプレイに接続し、USB Type-C で Raspberry Pi 4 の電源を入れます。
ソフトウェア
Raspberry Pi 4 は Python をサポートしているため、以下の手順に従えば、プロジェクトデモを Raspberry Pi 4 のディスプレイに簡単に表示できます。
- ステップ 1 grove.py を以下のコマンドでインストールします。
pip3 install Seeed-grove.py
- ステップ 2 以下のコマンドで MLX90641 ドライバをインストールします。 Python 環境(Raspberry Pi の権限がない場合):
pip3 install seeed-python-mlx9064x
最新のドライバにアップグレード:
pip3 install --upgrade seeed-python-mlx9064x
- ステップ 3 Raspberry Pi の対応する i2c 番号を確認します:
ls /dev/i2c*
以下のような結果が得られる場合があります:
/dev/i2c-1
-
ステップ 4 git clone コマンドを使用して MLX90641 ライブラリ をダウンロードします。
-
ステップ 5 以下のコマンドで BasicReadings.py ファイルを実行します:
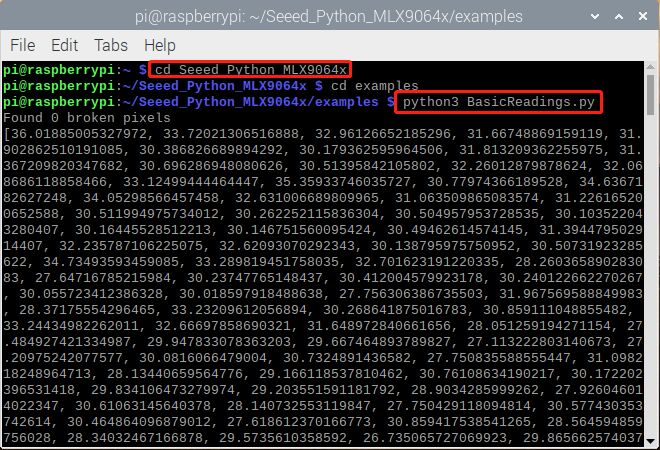
すべてが正常に動作すれば、上記のような結果が表示されます。
Raspberry Pi 上での結果のアップグレードされた UI が以下のようにリリースされています:
- ステップ 1 pyqt5 をインストールします:
sudo apt-get install python3-pyqt5 -y
- ステップ 2 PyPI からインストール:
sudo pip3 install seeed_python_ircamera
- ステップ 3 最大 i2c スピードを設定して再起動:
sudo sh -c "echo dtparam=i2c_arm=on,i2c_arm_baudrate=400000 >> /boot/config.txt"
sudo reboot
- ステップ 4 ターミナルで以下のコマンドを入力:
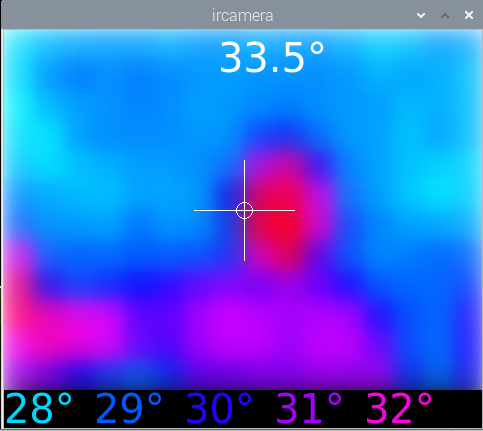
sudo ircamera I2C MLX90641
すべてが正常に動作すれば、以下のような結果が表示されます。
リソース
- [PDF] MLX90641のデータシート
- [ZIP] MLX90641の可視化ツール
技術サポートと製品ディスカッション
技術的な問題については、フォーラムに投稿してください。
産業用センサーへのアップグレード
SenseCAP S2110コントローラーとS2100データロガーを使用することで、Groveを簡単にLoRaWAN®センサーに変えることができます。Seeedはプロトタイピングをサポートするだけでなく、SenseCAPシリーズの堅牢な産業用センサーを使用してプロジェクトを拡張する可能性も提供します。
IP66の筐体、Bluetoothによる設定、グローバルLoRaWAN®ネットワークとの互換性、内蔵19Ahバッテリー、そして強力なAPPサポートにより、SenseCAP S210xは産業用途に最適な選択肢となります。このシリーズには、土壌水分、空気温度と湿度、光強度、CO2、EC、そして8-in-1の気象観測ステーション用センサーが含まれています。次の成功する産業プロジェクトには、最新のSenseCAP S210xをぜひお試しください。
