Grove - Wio-E5 Helium と TinyML アプリケーションデモ
はじめに
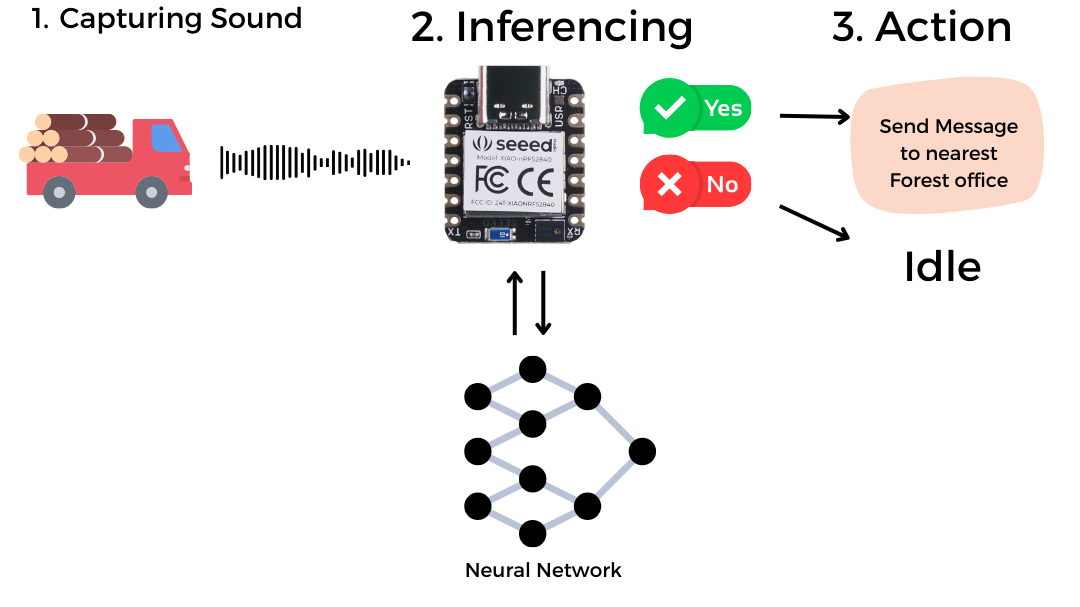
ここでは、TinyML と Helium LoRa IoT ネットワークを活用して違法な木材伐採を防ぐプロジェクトを構築します。
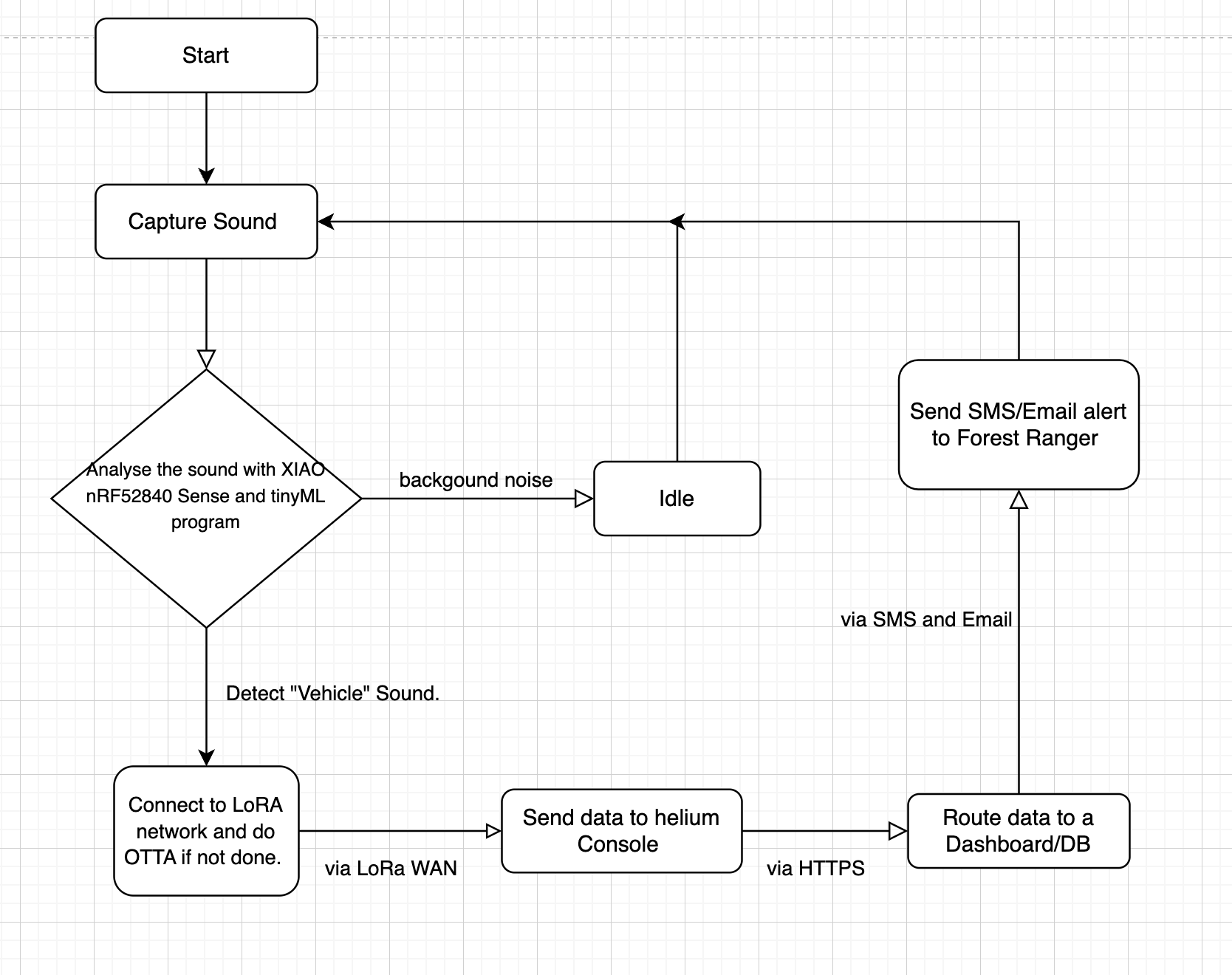
フローチャート
必要なハードウェア
| Seeeduino XIAO nRF52840 Sense | Grove - Wio-E5 | Seeeduino XIAO 拡張ボード |
|---|---|---|
|
|
|



必要なソフトウェアツール/サービス
- 1x Arduino IDE
- 1x Helium IoT コンソール
- 1x コンピュータ
- 1x USB Type-C ケーブル
Arduino IDE で XIAO nRF52840 Sense をセットアップする


一部の USB ケーブルは電力供給のみでデータ転送ができません。USB ケーブルを持っていない場合や、使用している USB ケーブルがデータ転送可能かどうかわからない場合は、Seeed USB Type-C support USB 3.1 を確認してください。
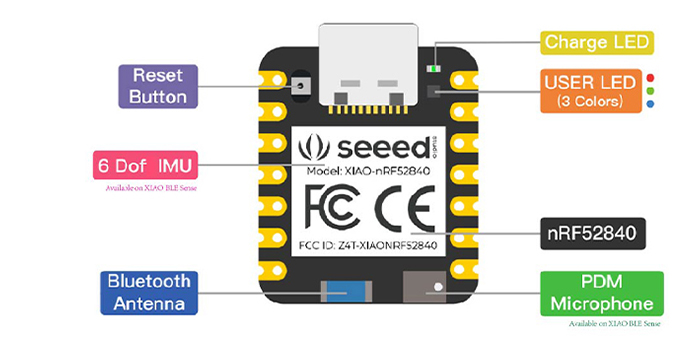
Seeed Studio XIAO nRF52840 (Sense) を USB Type-C ケーブルを使用してコンピュータに接続します。

ソフトウェアのセットアップ
- ステップ 1. オペレーティングシステムに応じて最新バージョンの Arduino IDE をダウンロードしてインストールします。

-
ステップ 2. Arduino アプリケーションを起動します。
-
ステップ 3. Arduino IDE に Seeed Studio XIAO nRF52840 (Sense) ボードパッケージを追加します。
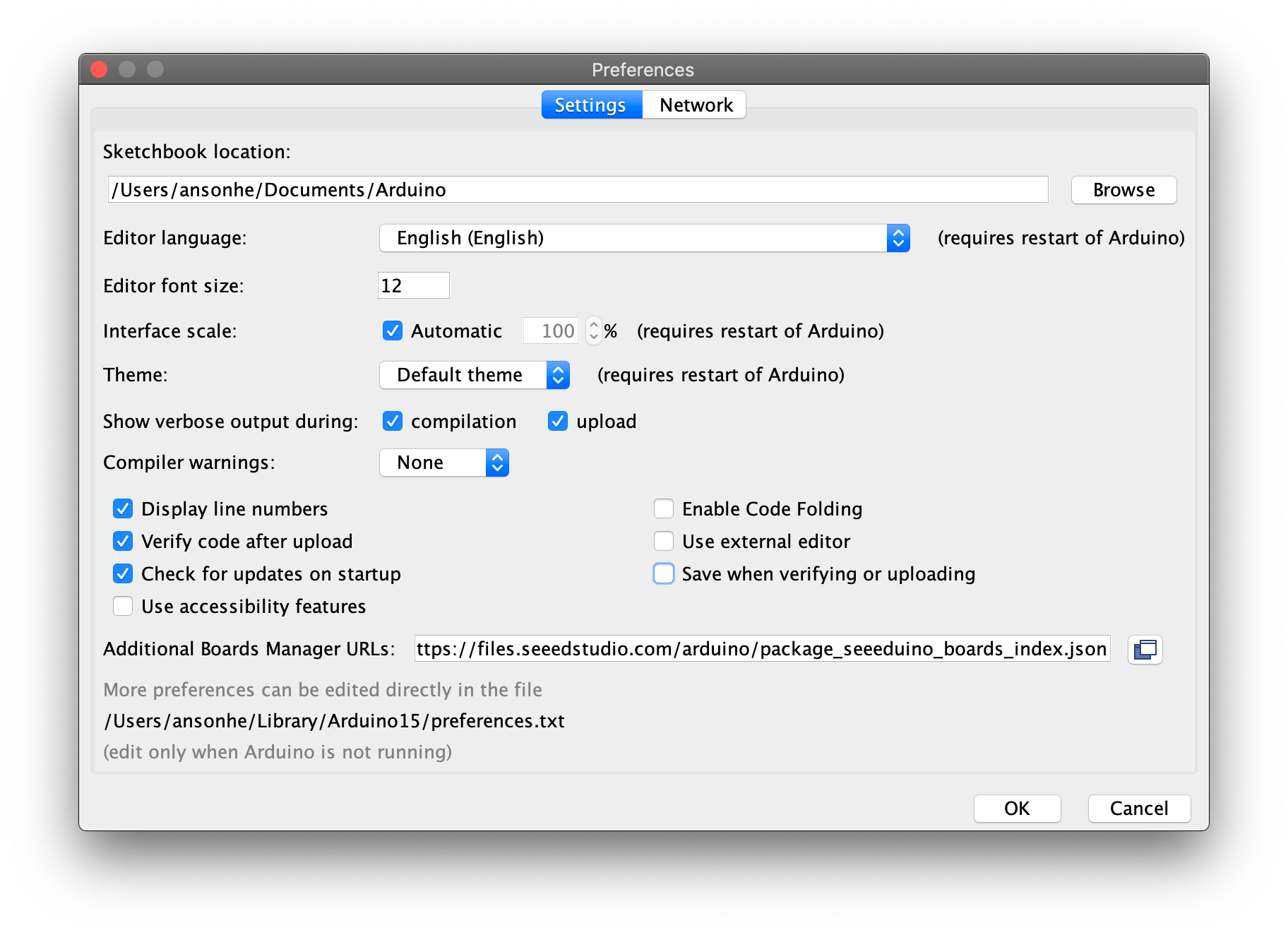
ファイル > 設定 に移動し、"追加のボードマネージャ URL" に以下の URL を入力します: https://files.seeedstudio.com/arduino/package_seeeduino_boards_index.json
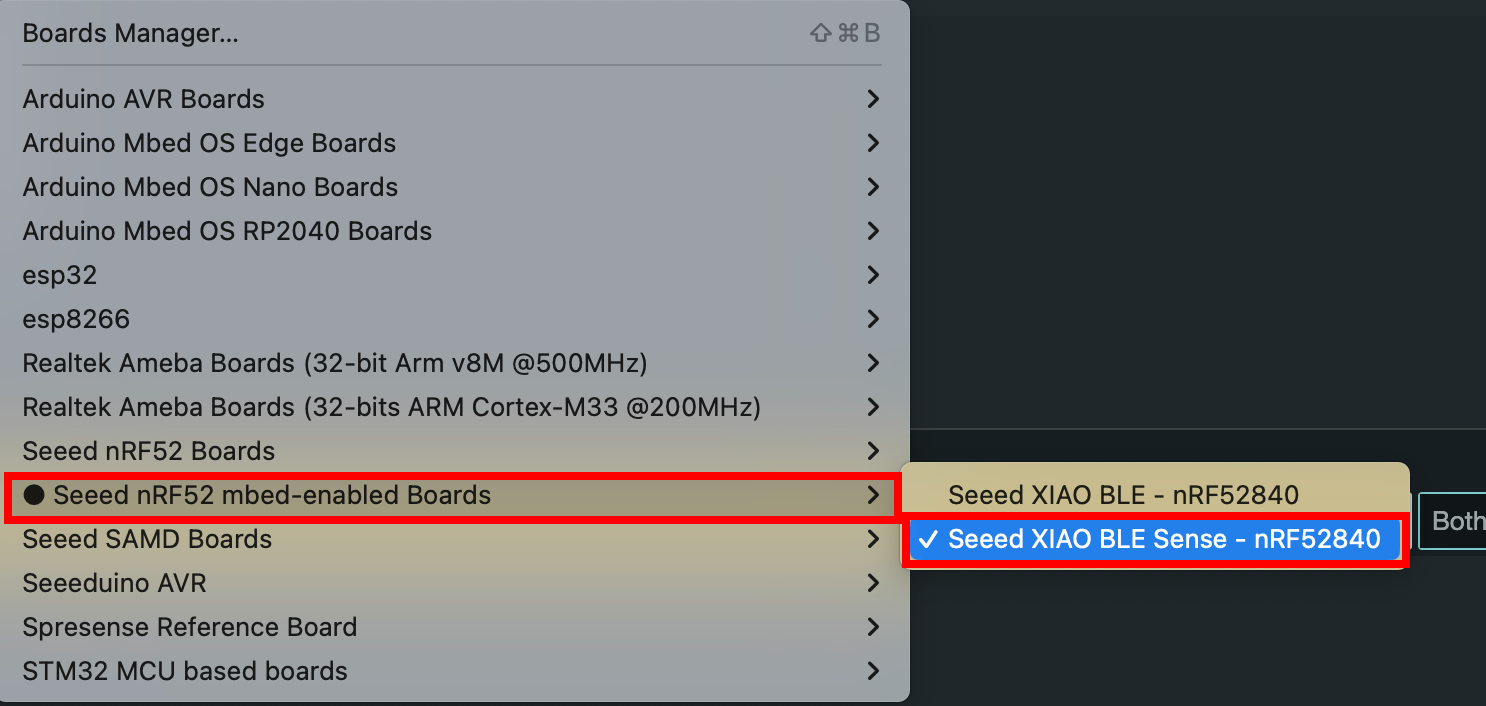
ツール > ボード > ボードマネージャ... に移動し、検索ボックスに "seeed nrf52" と入力して、使用したいボードの最新バージョンを選択してインストールします。両方をインストールすることも可能です。

- ステップ 4. ボードとポートを選択します。
ボード
ボードパッケージをインストールした後、ツール > ボード に移動して使用するボードを選択し、"Seeed nRF mbed-enabled Boards" から "Seeed XIAO BLE Sense nRF52840" を選択します。これで Arduino IDE 用の Seeed Studio XIAO nRF52840 (Sense) のセットアップが完了しました。
ポート
ツール > ポート に移動し、接続されている Seeed Studio XIAO nRF52840 (Sense) のシリアルポート名を選択します。これは通常、COM3 以上になります(COM1 および COM2 は通常ハードウェアシリアルポート用に予約されています)。接続されている Seeed Studio XIAO nRF52840 (Sense) のシリアルポートには、通常 Seeed Studio XIAO nRF52840 または Seeed Studio XIAO nRF52840 Sense と記載されています。

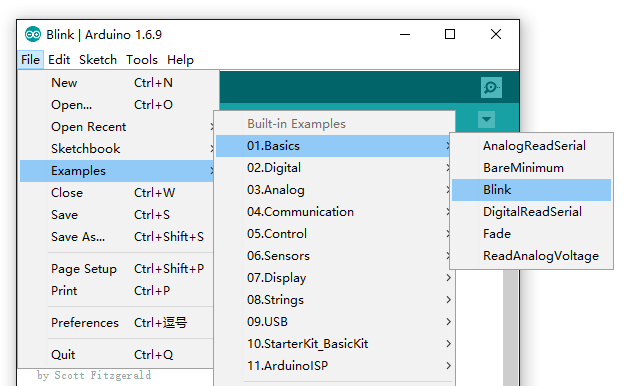
- ステップ 5. ファイル > サンプル > 01.Basics > Blink に移動して Blink サンプルを開きます。
- ステップ 6. アップロード ボタンをクリックして Blink サンプルコードをボードにアップロードします。
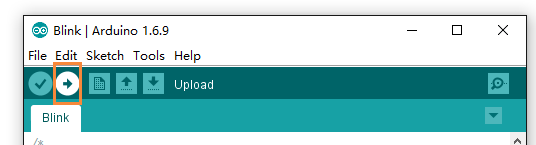
アップロードが完了すると、内蔵の赤色 LED が 1 秒間隔で点滅するのが確認できます。これで接続が成功したことを意味し、Seeed Studio XIAO nRF52840 (Sense) を使用してさらに多くのプロジェクトを探索する準備が整いました!
Helium LoRa WAN コンソールのセットアップ
Helium ネットワークのカバレッジ内にいることを確認してください。ネットワークカバレッジは explorer.helium.com で確認できます。
この手順に従って、エンドノード、ゲートウェイ、および使用している Helium 設定間の周波数帯域の一貫性を確保してください。このデモで使用される周波数プランは IN865 です。
Helium IoT ネットワークは LoRaWAN プロトコルを使用して「モノのインターネット」デバイスにインターネット接続を提供し、Helium エコシステム内の元のサブネットワークです。世界中の開発者や企業が Helium IoT ネットワークを接続性のために利用しています。
Helium IoT コンソールの準備
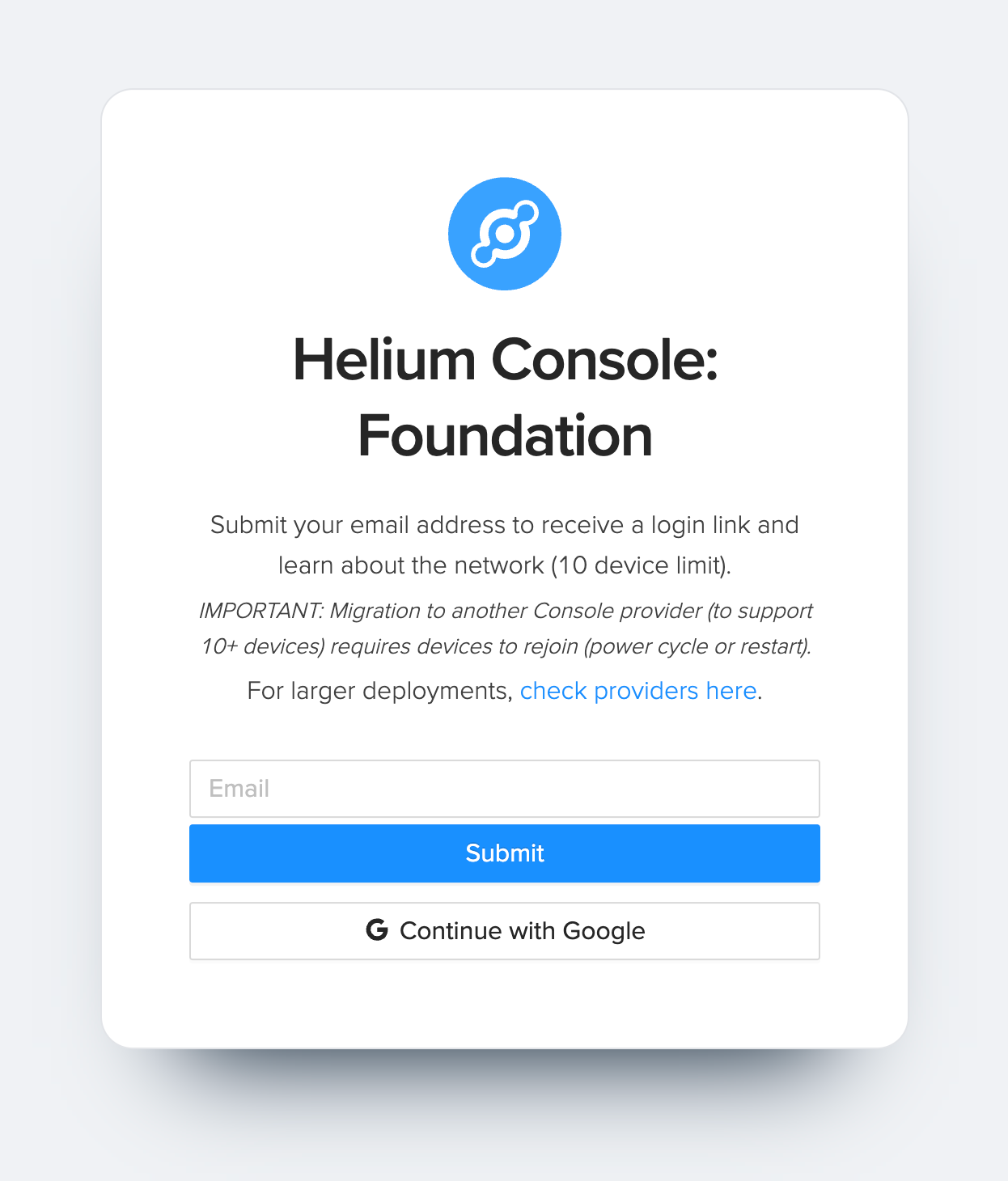
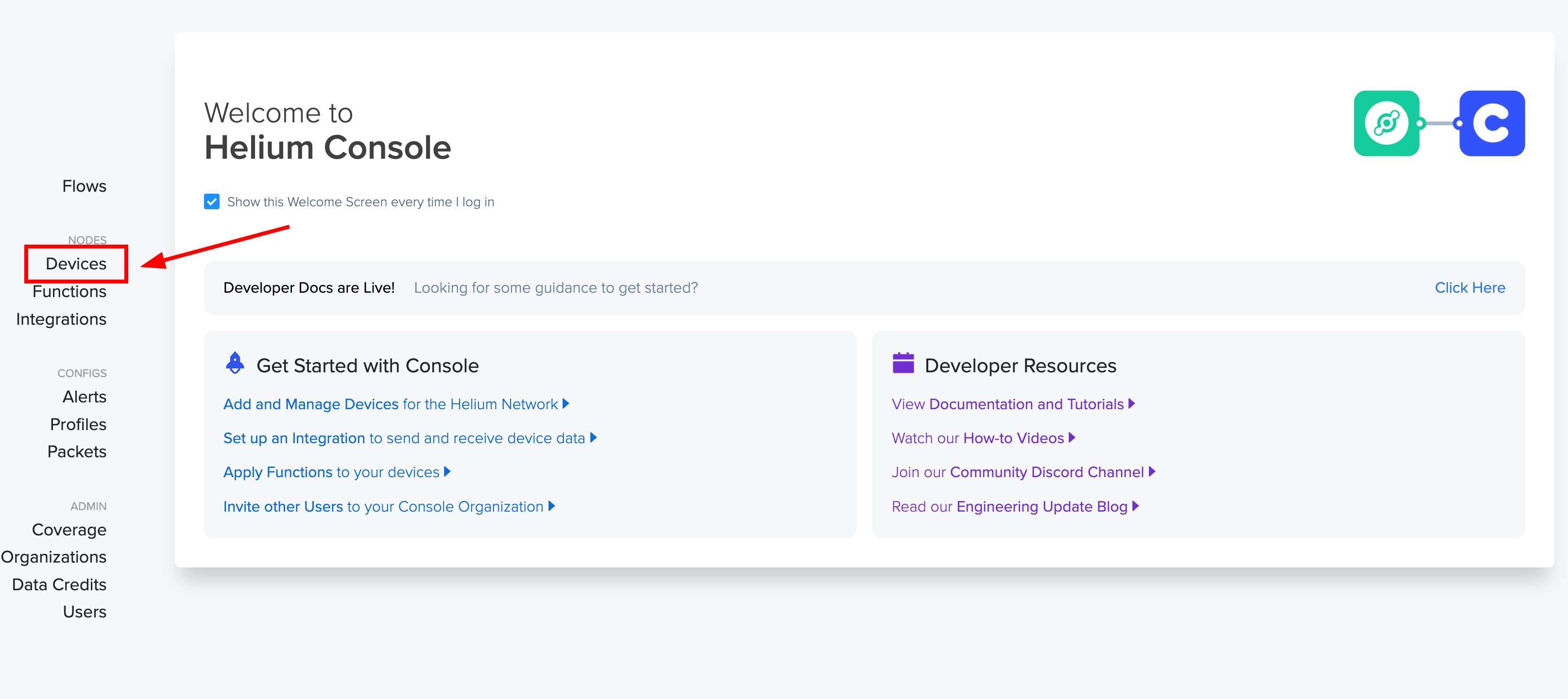
- ステップ 1. Helium コンソール のウェブサイトにアクセスし、新しいアカウントを登録します。
- ステップ 2. ログイン後、「Devices」をクリックしてデバイスを管理します。
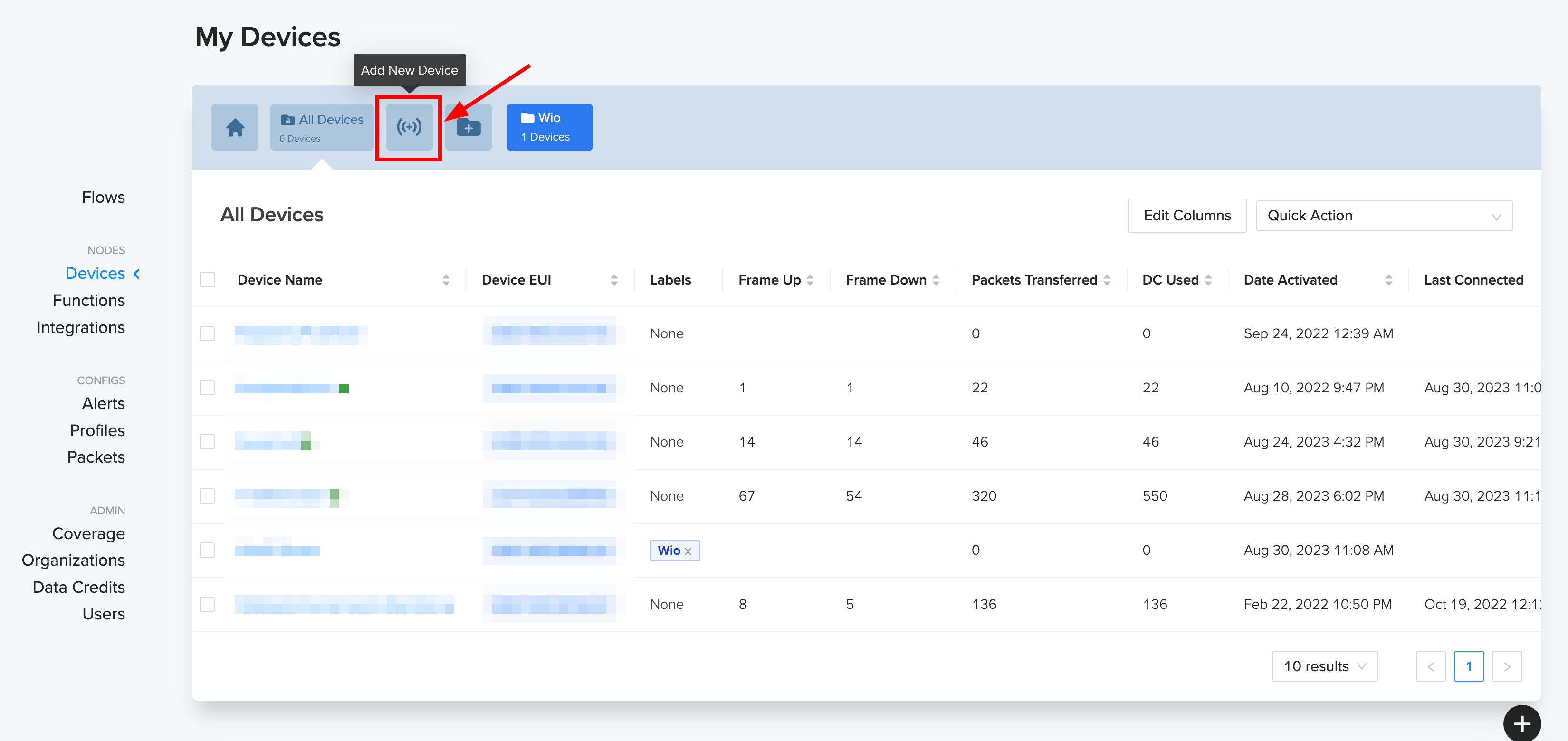
- ステップ 3. 次に「Add New Device」をクリックします。
- ステップ 4. ここで、1) 新しいデバイスを追加、2) Dev EUI をコピー、3) App EUI をコピー、4) App Key をコピー、5) 最後に「Save」をクリックします。
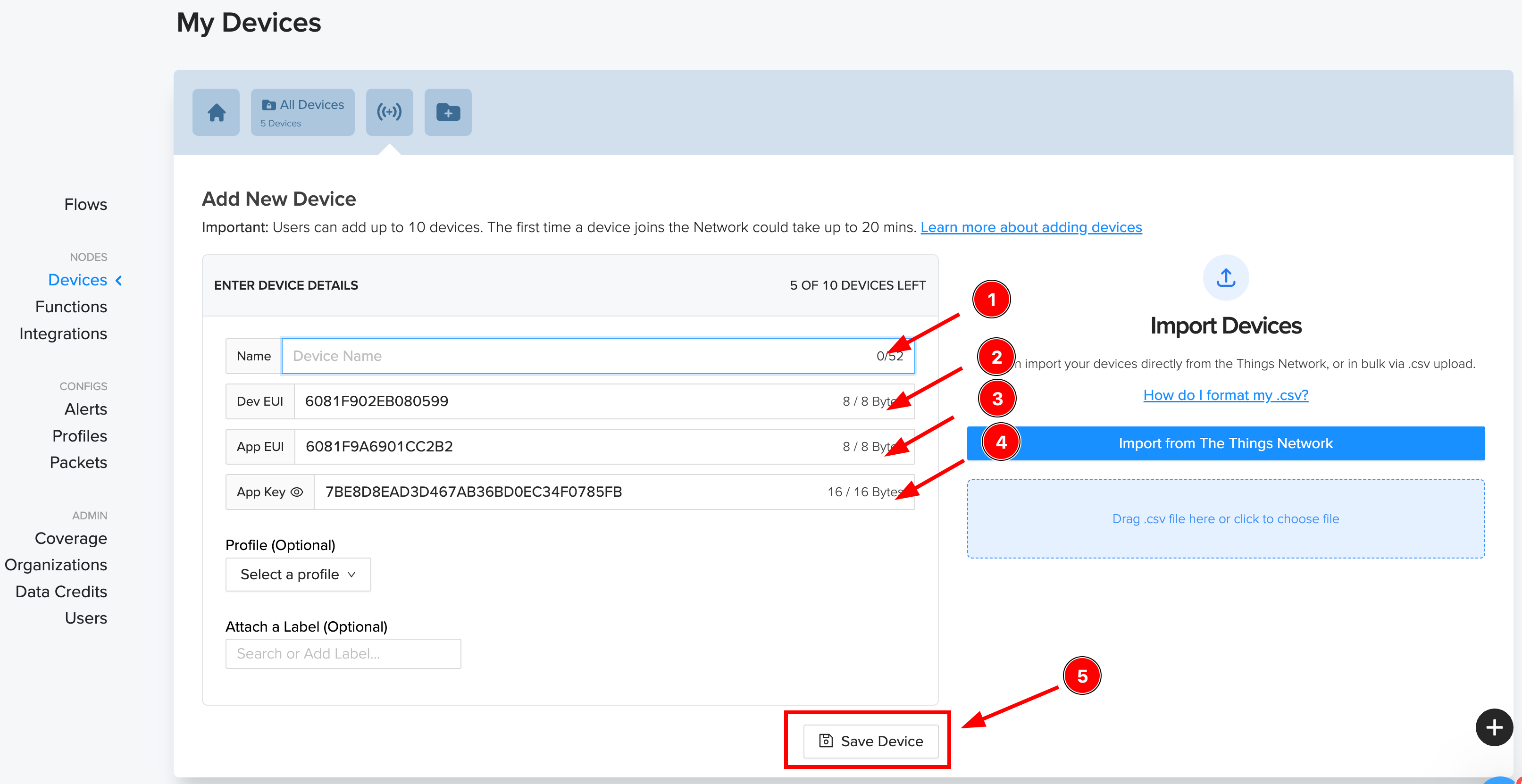
- ステップ 5. これで「Devices」セクションにデバイスが表示されます。

これで Helium コンソールのセットアップが完了しました。次にソフトウェア部分に進み、Helium LoRa ネットワークを介して Helium コンソールにデータをアップロードします。
ハードウェアの準備
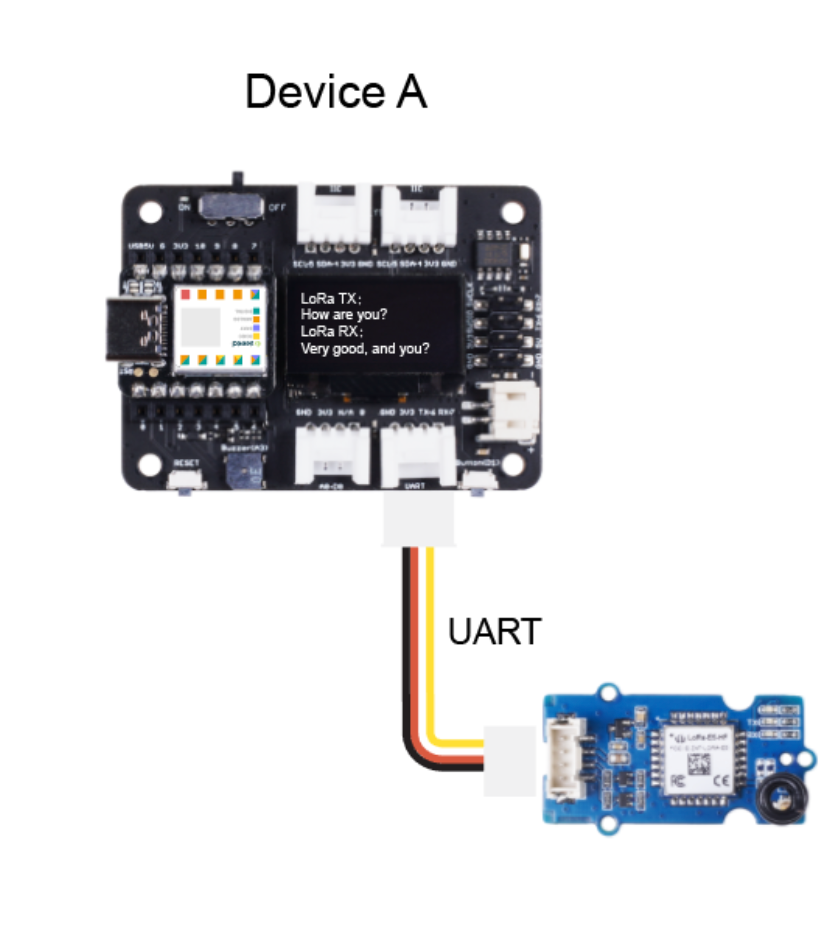
XIAO nRF52840 BLE Sense を Seeeduino XIAO 拡張ボードに配置し、Grove - Wio E5 を XIAO 拡張ボードの UART ポートに接続します。
ソフトウェアの準備
Edge Impulse ツールを使用して tinyML モデルを開発しました。データセットとプロジェクトの詳細は こちら で確認できます。また、プロジェクトをクローンして必要に応じて変更を加えることもできます。
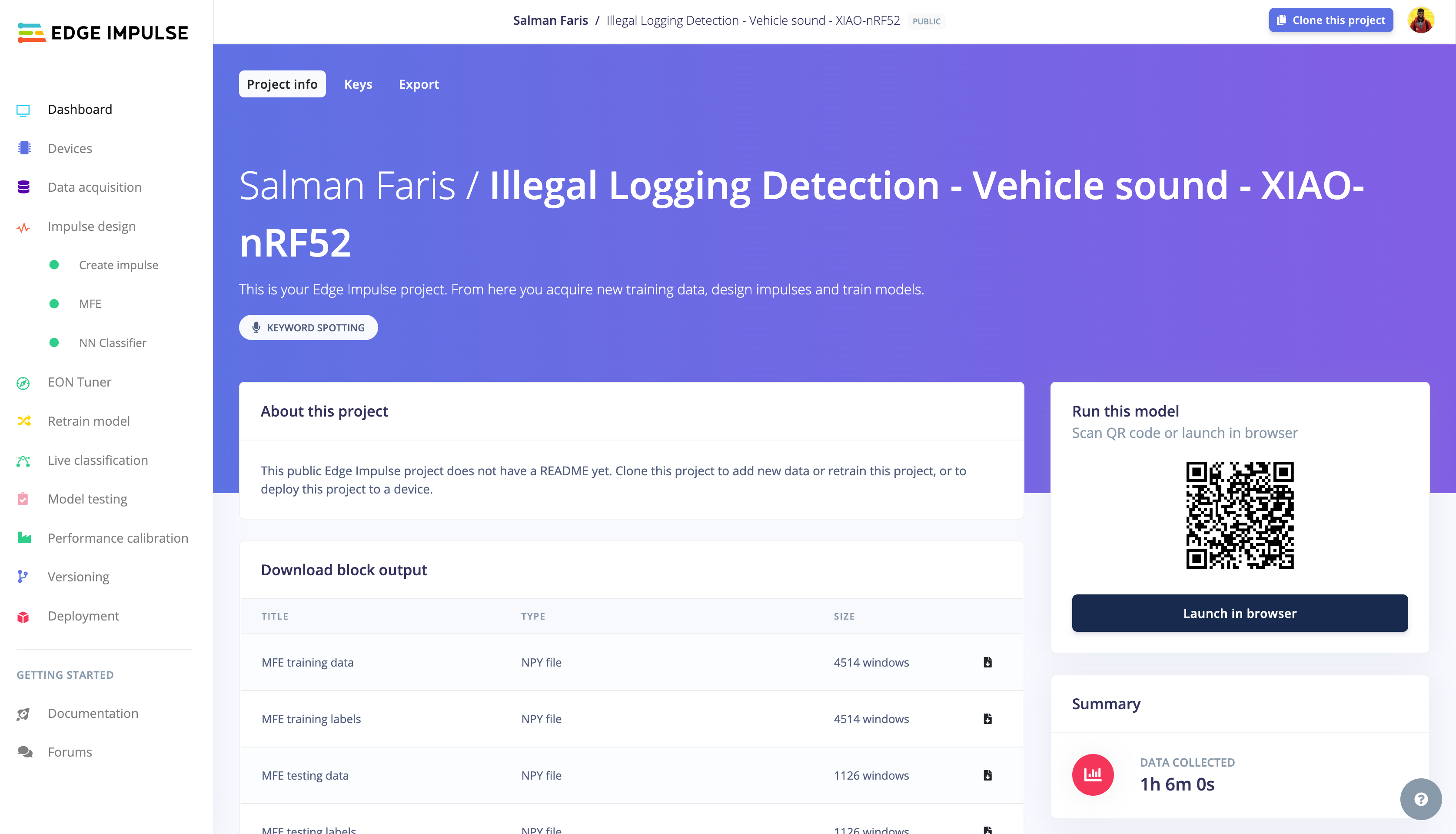
現在、こちら から Edge Impulse tinyML ライブラリをダウンロードし、Arduino に追加してください。このガイド を参照して ZIP ライブラリの追加方法を学んでください。
ライブラリを追加した後、以下のコードをコピーして Arduino スケッチに貼り付け、Helium LoRa WAN の認証情報を置き換えてください。
/* Edge Impulse ingestion SDK
* Copyright (c) 2022 EdgeImpulse Inc.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*
*/
// If your target is limited in memory remove this macro to save 10K RAM
#define EIDSP_QUANTIZE_FILTERBANK 0
/*
** NOTE: If you run into TFLite arena allocation issue.
**
** This may be due to may dynamic memory fragmentation.
** Try defining "-DEI_CLASSIFIER_ALLOCATION_STATIC" in boards.local.txt (create
** if it doesn't exist) and copy this file to
** `<ARDUINO_CORE_INSTALL_PATH>/arduino/hardware/<mbed_core>/<core_version>/`.
**
** See
** (https://support.arduino.cc/hc/en-us/articles/360012076960-Where-are-the-installed-cores-located-)
** to find where Arduino installs cores on your machine.
**
** If the problem persists then there's not enough memory for this model and application.
*/
/*
** Developed by Salman Faris
** Date: 20/09/2023
*/
/* Includes ---------------------------------------------------------------- */
#include <PDM.h>
#include <Illegal_Logging_Detection_-_Vehicle_sound_-_XIAO-nRF52_inferencing.h>
#include <Arduino.h>
#include <U8x8lib.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/*reset=*/U8X8_PIN_NONE);
/** Audio buffers, pointers and selectors */
typedef struct {
int16_t *buffer;
uint8_t buf_ready;
uint32_t buf_count;
uint32_t n_samples;
} inference_t;
static inference_t inference;
static signed short sampleBuffer[2048];
static bool debug_nn = false; // Set this to true to see e.g. features generated from the raw signal
//LoRa Buffer
static char recv_buf[512];
static bool is_exist = false;
static bool is_join = false;
static int led = 0;
//Inference Data
int pred_index = 0; // Initialize pred_index
float pred_value = 0; // Initialize pred_value
static int at_send_check_response(char *p_ack, int timeout_ms, char *p_cmd, ...) {
int ch;
int num = 0;
int index = 0;
int startMillis = 0;
va_list args;
char cmd_buffer[256]; // Adjust the buffer size as needed
memset(recv_buf, 0, sizeof(recv_buf));
va_start(args, p_cmd);
vsprintf(cmd_buffer, p_cmd, args); // Format the command string
Serial1.print(cmd_buffer);
Serial.print(cmd_buffer);
va_end(args);
delay(200);
startMillis = millis();
if (p_ack == NULL) {
return 0;
}
do {
while (Serial1.available() > 0) {
ch = Serial1.read();
recv_buf[index++] = ch;
Serial.print((char)ch);
delay(2);
}
if (strstr(recv_buf, p_ack) != NULL) {
return 1;
}
} while (millis() - startMillis < timeout_ms);
return 0;
}
static void recv_prase(char *p_msg) {
if (p_msg == NULL) {
return;
}
char *p_start = NULL;
int data = 0;
int rssi = 0;
int snr = 0;
p_start = strstr(p_msg, "RX");
if (p_start && (1 == sscanf(p_start, "RX: \"%d\"\r\n", &data))) {
Serial.println(data);
u8x8.setCursor(2, 4);
u8x8.print("led :");
led = !!data;
u8x8.print(led);
if (led) {
digitalWrite(LED_BUILTIN, LOW);
} else {
digitalWrite(LED_BUILTIN, HIGH);
}
}
p_start = strstr(p_msg, "RSSI");
if (p_start && (1 == sscanf(p_start, "RSSI %d,", &rssi))) {
u8x8.setCursor(0, 6);
u8x8.print(" ");
u8x8.setCursor(2, 6);
u8x8.print("rssi:");
u8x8.print(rssi);
}
p_start = strstr(p_msg, "SNR");
if (p_start && (1 == sscanf(p_start, "SNR %d", &snr))) {
u8x8.setCursor(0, 7);
u8x8.print(" ");
u8x8.setCursor(2, 7);
u8x8.print("snr :");
u8x8.print(snr);
}
}
/**
* @brief Arduino setup function
*/
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial1.begin(9600);
// comment out the below line to cancel the wait for USB connection (needed for native USB)
while (!Serial)
;
Serial.println("Edge Impulse Inferencing Demo");
// summary of inferencing settings (from model_metadata.h)
ei_printf("Inferencing settings:\n");
ei_printf("\tInterval: %.2f ms.\n", (float)EI_CLASSIFIER_INTERVAL_MS);
ei_printf("\tFrame size: %d\n", EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE);
ei_printf("\tSample length: %d ms.\n", EI_CLASSIFIER_RAW_SAMPLE_COUNT / 16);
ei_printf("\tNo. of classes: %d\n", sizeof(ei_classifier_inferencing_categories) / sizeof(ei_classifier_inferencing_categories[0]));
if (microphone_inference_start(EI_CLASSIFIER_RAW_SAMPLE_COUNT) == false) {
ei_printf("ERR: Could not allocate audio buffer (size %d), this could be due to the window length of your model\r\n", EI_CLASSIFIER_RAW_SAMPLE_COUNT);
return;
}
u8x8.begin();
u8x8.setFlipMode(1);
u8x8.setFont(u8x8_font_chroma48medium8_r);
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
Serial1.begin(9600);
Serial.print("E5 LORAWAN TEST\r\n");
u8x8.setCursor(0, 0);
if (at_send_check_response("+AT: OK", 100, "AT\r\n")) {
is_exist = true;
at_send_check_response("+ID: DevEui", 1000, "AT+ID=DevEui,\"XXXXXXXXXX"\r\n");
at_send_check_response("+ID: AppEui", 1000, "AT+ID=AppEui,\"XXXXXXXXXXX\"\r\n");
at_send_check_response("+KEY: APPKEY", 1000, "AT+KEY=APPKEY,\"XXXXXXXXXXXX\"\r\n");
at_send_check_response("+ID: DevAddr", 1000, "AT+ID=DevAddr\r\n");
at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n");
at_send_check_response("+MODE: LWOTAA", 1000, "AT+MODE=LWOTAA\r\n");
at_send_check_response("+DR: IN865", 1000, "AT+DR=IN865\r\n");
at_send_check_response("+CH: NUM", 1000, "AT+CH=NUM,0-2\r\n");
at_send_check_response("+CLASS: A", 1000, "AT+CLASS=A\r\n");
at_send_check_response("+PORT: 8", 1000, "AT+PORT=8\r\n");
delay(200);
u8x8.setCursor(5, 0);
u8x8.print("LoRaWAN");
is_join = true;
} else {
is_exist = false;
Serial.print("No E5 module found.\r\n");
u8x8.setCursor(0, 1);
u8x8.print("unfound E5 !");
}
//dht.begin();
}
/**
* @brief Arduino main function. Runs the inferencing loop.
*/
void loop() {
ei_printf("Starting inferencing in 2 seconds...\n");
delay(2000);
ei_printf("Recording...\n");
bool m = microphone_inference_record();
if (!m) {
ei_printf("ERR: Failed to record audio...\n");
return;
}
ei_printf("Recording done\n");
signal_t signal;
signal.total_length = EI_CLASSIFIER_RAW_SAMPLE_COUNT;
signal.get_data = µphone_audio_signal_get_data;
ei_impulse_result_t result = { 0 };
EI_IMPULSE_ERROR r = run_classifier(&signal, &result, debug_nn);
if (r != EI_IMPULSE_OK) {
ei_printf("ERR: Failed to run classifier (%d)\n", r);
return;
}
int pred_index = 0; // Initialize pred_index
float pred_value = 0; // Initialize pred_value
// print the predictions
ei_printf("Predictions ");
ei_printf("(DSP: %d ms., Classification: %d ms., Anomaly: %d ms.)",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
ei_printf(": \n");
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label, result.classification[ix].value);
ei_printf("\n");
if (result.classification[ix].value > pred_value) {
pred_index = ix;
pred_value = result.classification[ix].value;
}
}
// Display inference result and Send message to Helium Console.
if ((pred_index == 1 && (pred_value > 0.8))) {
ei_printf("Vehicle Sound is Detected ");
ei_printf("\n");
int SOS = 10;
int DeviceID = 1;
if (is_exist) {
int ret = 0;
if (is_join) {
ret = at_send_check_response("+JOIN: Network joined", 12000, "AT+JOIN\r\n");
if (ret) {
is_join = false;
} else {
at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n");
Serial.print("JOIN failed!\r\n\r\n");
delay(5000);
}
} else {
char cmd[128];
sprintf(cmd, "AT+CMSGHEX=\"%04X%04X\"\r\n", (int)DeviceID, (int)SOS);
ret = at_send_check_response("Done", 5000, cmd);
u8x8.setCursor(0, 2);
u8x8.print(" ");
u8x8.setCursor(2, 2);
u8x8.print("Vehicle Detected");
u8x8.setCursor(2, 3);
u8x8.print("Sending SOS");
if (ret) {
recv_prase(recv_buf);
} else {
Serial.print("Send failed!\r\n\r\n");
}
delay(5000);
}
} else {
delay(1000);
}
}
else {
u8x8.setCursor(0, 2);
u8x8.print(" ");
u8x8.setCursor(2, 2);
u8x8.print("Normal Condition");
u8x8.setCursor(2, 3);
u8x8.print("idle");
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\n", result.anomaly);
#endif
}
/**
* @brief PDM buffer full callback
* Get data and call audio thread callback
*/
static void pdm_data_ready_inference_callback(void) {
int bytesAvailable = PDM.available();
// read into the sample buffer
int bytesRead = PDM.read((char *)&sampleBuffer[0], bytesAvailable);
if (inference.buf_ready == 0) {
for (int i = 0; i < bytesRead >> 1; i++) {
inference.buffer[inference.buf_count++] = sampleBuffer[i];
if (inference.buf_count >= inference.n_samples) {
inference.buf_count = 0;
inference.buf_ready = 1;
break;
}
}
}
}
/**
* @brief Init inferencing struct and setup/start PDM
*
* @param[in] n_samples The n samples
*
* @return { description_of_the_return_value }
*/
static bool microphone_inference_start(uint32_t n_samples) {
inference.buffer = (int16_t *)malloc(n_samples * sizeof(int16_t));
if (inference.buffer == NULL) {
return false;
}
inference.buf_count = 0;
inference.n_samples = n_samples;
inference.buf_ready = 0;
// configure the data receive callback
PDM.onReceive(&pdm_data_ready_inference_callback);
PDM.setBufferSize(4096);
// initialize PDM with:
// - one channel (mono mode)
// - a 16 kHz sample rate
if (!PDM.begin(1, EI_CLASSIFIER_FREQUENCY)) {
ei_printf("Failed to start PDM!");
microphone_inference_end();
return false;
}
// set the gain, defaults to 20
PDM.setGain(127);
return true;
}
/**
* @brief Wait on new data
*
* @return True when finished
*/
static bool microphone_inference_record(void) {
inference.buf_ready = 0;
inference.buf_count = 0;
while (inference.buf_ready == 0) {
delay(10);
}
return true;
}
/**
* Get raw audio signal data
*/
static int microphone_audio_signal_get_data(size_t offset, size_t length, float *out_ptr) {
numpy::int16_to_float(&inference.buffer[offset], out_ptr, length);
return 0;
}
/**h
* @brief Stop PDM and release buffers
*/
static void microphone_inference_end(void) {
PDM.end();
free(inference.buffer);
}
#if !defined(EI_CLASSIFIER_SENSOR) || EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_MICROPHONE
#error "Invalid model for current sensor."
#endif
DevEUI、AppEUI、および APPKEY を、Helium コンソールから取得した認証情報に置き換えてください。また、地域の周波数プランに応じて IN865 を適切に置き換えることを確認してください。
at_send_check_response("+ID: DevEui", 1000, "AT+ID=DevEui,\"xxxxxxxxxxx\"\r\n");
at_send_check_response("+ID: AppEui", 1000, "AT+ID=AppEui,\"xxxxxxxxxxx\"\r\n");
at_send_check_response("+KEY: APPKEY", 1000, "AT+KEY=APPKEY,\"xxxxxxxxxxxxxxx\"\r\n");
at_send_check_response("+ID: DevAddr", 1000, "AT+ID=DevAddr\r\n");
at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n");
at_send_check_response("+MODE: LWOTAA", 1000, "AT+MODE=LWOTAA\r\n");
at_send_check_response("+DR: IN865", 1000, "AT+DR=IN865\r\n");
at_send_check_response("+CH: NUM", 1000, "AT+CH=NUM,0-2\r\n");
at_send_check_response("+CLASS: A", 1000, "AT+CLASS=A\r\n");
at_send_check_response("+PORT: 8", 1000, "AT+PORT=8\r\n");
以下のセクションでは、XIAO が 車両音を検出するかどうかを確認し、検出された場合は Helium コンソールに LoRa WAN 接続を確立し、データ 1 を 車両音が検出されたシンボルとして送信することがわかります。
// 推論結果を表示し、Helium コンソールにメッセージを送信します。
if ((pred_index == 1 && (pred_value > 0.8))) {
ei_printf("車両音が検出されました ");
ei_printf("\n");
int SOS = 10;
int DeviceID = 1;
if (is_exist) {
int ret = 0;
if (is_join) {
ret = at_send_check_response("+JOIN: Network joined", 12000, "AT+JOIN\r\n");
if (ret) {
is_join = false;
} else {
at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n");
Serial.print("JOIN に失敗しました!\r\n\r\n");
delay(5000);
}
} else {
char cmd[128];
sprintf(cmd, "AT+CMSGHEX=\"%04X%04X\"\r\n", (int)DeviceID, (int)SOS);
ret = at_send_check_response("Done", 5000, cmd);
u8x8.setCursor(0, 2);
u8x8.print(" ");
u8x8.setCursor(2, 2);
u8x8.print("車両が検出されました");
u8x8.setCursor(2, 3);
u8x8.print("SOS を送信中");
if (ret) {
recv_prase(recv_buf);
} else {
Serial.print("送信に失敗しました!\r\n\r\n");
}
delay(5000);
}
} else {
delay(1000);
}
}
else {
u8x8.setCursor(0, 2);
u8x8.print(" ");
u8x8.setCursor(2, 2);
u8x8.print("通常の状態");
u8x8.setCursor(2, 3);
u8x8.print("アイドル中");
}
デモ
Helium ネットワークのカバレッジ内にいることを確認してください。ネットワークカバレッジは explorer.helium.com で確認できます。
コードをアップロードした後、XIAO nRF52840 Sense は音をキャプチャし、tinyML を使用してエンジン音があるかどうかを確認します。アクションをトリガーするためにエンジン音を再生してみてください。エンジン音が検出されると (1)、XIAO は Helium LoRa ネットワーク接続を確立し、コマンド "1" を 車両音が検出されたシンボルとして送信します (2)。
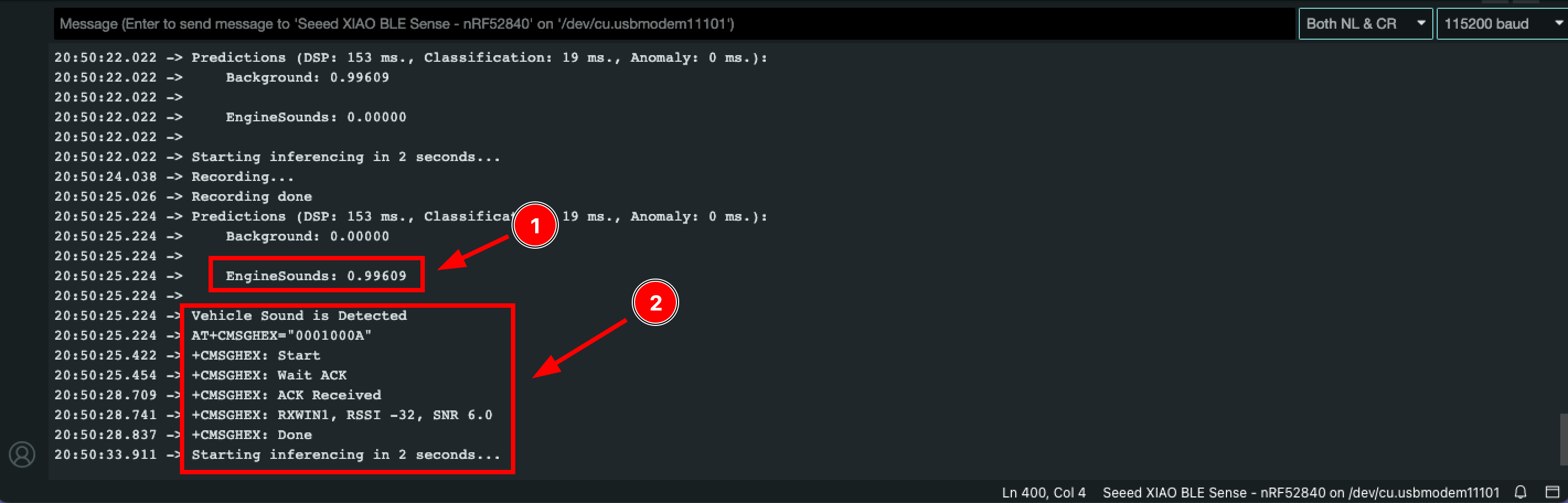
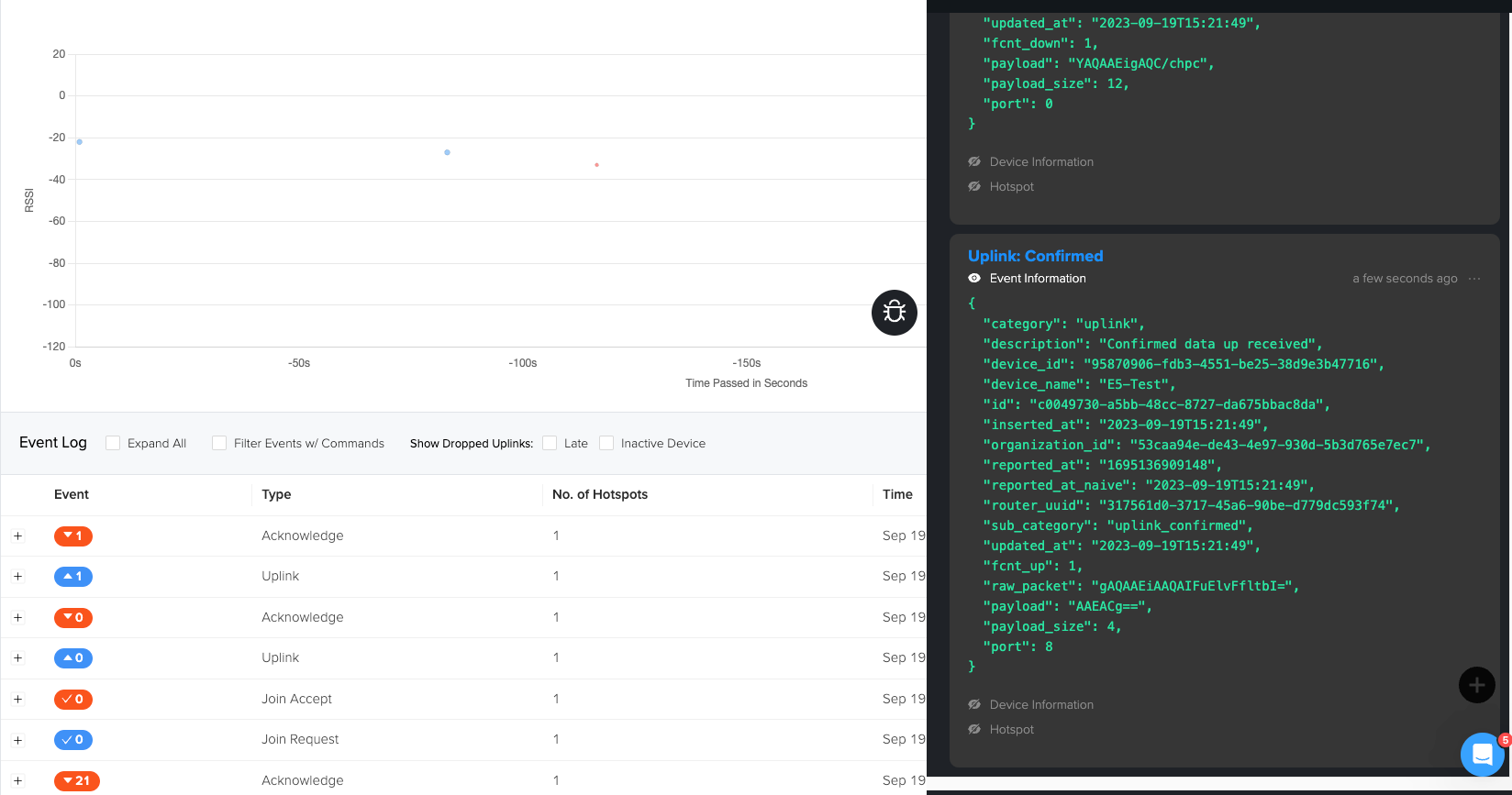
Helium コンソールとそのデバッグウィンドウでデータを確認できます。
ToDo
これまでに、tinyMLとLoRaの統合を行いました。そして、プロジェクトを改善するために取り組むことができるいくつかのToDoがあります。
- Heliumコンソールをダッシュボードと統合し、データを可視化する
- カスタムダッシュボードを使用して、森林レンジャーに通知するためのEmail/SMS/電話アラートを作成する
リソース
データシート:
認証:
関連SDK:
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、いくつかのコミュニケーションチャネルを用意しています。