インターフェース使用方法
はじめに
reComputer J401キャリアボード は NVIDIA Jetson Orin Nano/NX(Orin Nano 4GB/Orin Nano 8GB, Orin NX 8GB/Orin NX 16GB) をサポートし、優れた性能を提供し、困難なエッジコンピューティングタスクを簡単に処理できるよう設計されています。産業オートメーションシステムの開発や強力なAIアプリケーションの構築などに最適な選択肢です。
高速ネットワーキング用の1x ギガビットイーサネットポート を搭載したネットワーキング機能を備えています。また、多様な接続オプションとして4x USB 3.2 Type-A(10Gbps)ポート、1x USB 2.0 Type-Cポート、1x CANコネクタ を搭載しています。この拡張ボードには、SSDカード用の1x M.2 Key M 2280(128GB NVMe 2280 SSD付属)とLTEワイヤレス接続拡張用の1x M.2 Key E スロットが搭載されています。
さらに、ボード上では複数の周辺機器がサポートされています。カメラとディスプレイ接続用の2x 15ピンMIPI-CSI と1x HDMI 2.1 コネクタにより、高品質なビデオコンテンツのキャプチャと表示が可能です。また、5V PWMファンヘッダー、1つの RTCソケット、2ピンRTCヘッダー も含まれています。
ボードは 9-19V DC の広い入力範囲をサポートし、様々なコンピューティングタスクへの統合を柔軟に行えます。-10°Cから60°Cの温度範囲で動作を維持します。
その他のアクセサリーの提案については、reComputer J401のバンドルページをご参照ください。
260ピンSODIMM
260ピンSODIMMの主な機能は、キャリアボードを NVIDIA Jetson Orin Nano 4GB/NVIDIA Jetson Orin Nano 8GB、NVIDIA Jetson Orin NX 8GB/NVIDIA Jetson Orin NX 16GB と接続することです。
接続概要
接続が正しい場合、電源アダプターを接続すると電源インジケーターが点灯します。
M.2 Key M
M.2 Key M は、PCIe(Peripheral Component Interconnect Express)インターフェースを使用した高速データ転送をサポートする M.2 コネクタの物理的および電気的レイアウトの仕様です。M.2 Key M コネクタは、ソリッドステートドライブ(SSD)やその他の高性能拡張カードをマザーボードやその他のホストデバイスに接続するために一般的に使用されます。「Key M」の指定は、M.2 コネクタの特定のピン構成とキーイングを指し、これによって接続できるデバイスの種類が決まります。
サポートされている SSD は以下の通りです:
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
接続概要
付属の SSD を取り外して新しいものを取り付けたい場合は、以下の手順に従ってください。
使用方法
接続された SSD で簡単なベンチマークを実行する方法を説明します。
- ステップ 1: 以下のコマンドを実行して書き込み速度を確認します。
sudo dd if=/dev/zero of=/home/nvidia/test bs=1M count=512 conv=fdatasync
- ステップ 2: 以下のコマンドを実行して読み取り速度を確認します。書き込み速度の上記コマンドを実行した後に、必ずこれを実行してください。
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sudo dd if=/home/nvidia/test of=/dev/null bs=1M count=512
M.2 Key E
M.2 Key Eは、Wi-FiやBluetoothカードなどの無線通信モジュールをサポートするM.2コネクタの物理的および電気的レイアウトの仕様です。「Key E」の指定は、無線ネットワークデバイス用に最適化されたM.2コネクタの特定のピン構成とキーイングを指します。M.2 Key Eコネクタは、無線接続オプションを必要とするマザーボードやその他のデバイスで一般的に見られます。ここではIntel wifi/bluetoothモジュールを推奨します。
接続概要
使用方法
wifi/bluetoothモジュールをインストール後、右上角にwifi/bluetoothアイコンが表示されます。
Wi-Fiテスト
ifconfig

Bluetoothテスト
bluetoothctl
power on #open bluetooth
agent on #registe agent
scan on #search other bluetooths
connect xx:xx:xx:xx #connect target bluetooth
paired-devices #show all paired devices

CSI カメラ
CSI は Camera Serial Interface の略です。これは、イメージセンサーからホストプロセッサーへビデオデータを転送するためのシリアル通信インターフェースを記述する仕様です。CSI は、モバイルデバイス、カメラ、組み込みシステムで一般的に使用され、処理と分析のための画像およびビデオデータの高速で効率的な転送を可能にします。
サポートされているカメラは以下の通りです:
-
IMX219 カメラ
-
IMX477 カメラ
接続概要
ここでは、2つの CSI カメラコネクタが CAM0 と CAM1 としてマークされています。2つのコネクタのうちいずれかに1つのカメラを接続するか、両方のコネクタに同時に2つのカメラを接続することができます。
使用方法
ターミナルを開き(Ctrl+Alt+T)、以下のようなコマンドを入力してください:
sudo /opt/nvidia/jetson-io/jetson-io.py
- 方法1
- Method 2
CAM0ポート用
nvgstcapture-1.0 sensor-id=0
CAM1ポート用
nvgstcapture-1.0 sensor-id=1
カメラのさらなる設定を変更したい場合は、"nvgstcapture-1.0 --help" と入力することで、利用可能なすべての設定可能オプションにアクセスできます。
CAM0ポート用
gst-launch-1.0 nvarguscamerasrc sensor-id=0 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
CAM1ポート用
gst-launch-1.0 nvarguscamerasrc sensor-id=1 sensor-mode=0 ! 'video/x-raw(memory:NVMM),width=1920, height=1080, framerate=20/1, format=NV12' ! nvvidconv ! xvimagesink
カメラのさらなる設定を変更したい場合は、width、height、framerate、formatなどの引数を更新できます。
RTC
RTCはReal-Time Clockの略です。これは、メインシステムクロックとは独立して現在の時刻と日付を追跡するクロックです。RTCは、コンピュータ、組み込みシステム、その他の電子機器で一般的に使用され、デバイスの電源がオフになっていても正確な時刻を維持します。電源サイクル中も継続的に動作し、時刻と日付情報を保持するために、小さなバッテリーで電源供給されることがよくあります。
接続概要
- Method 1
- Method 2
以下に示すように、3V CR1220コイン電池をボード上のRTCソケットに接続します。電池の**プラス(+)**端が上向きになるようにしてください。
以下に示すように、JSTコネクタ付き3V CR2302コイン電池をボード上の2ピン1.25mm JSTソケットに接続します:
使用方法
-
ステップ1: 上記のようにRTC電池を接続します。
-
ステップ2: reComputer Industrialの電源を入れます。
-
ステップ3: Ubuntuデスクトップで、右上角のドロップダウンメニューをクリックし、
Settings > Date & Timeに移動し、イーサネットケーブルでネットワークに接続してAutomatic Date & Timeを選択し、日付/時刻を自動的に取得します。

イーサネット経由でインターネットに接続していない場合は、ここで日付/時刻を手動で設定できます。
- ステップ4: ターミナルウィンドウを開き、以下のコマンドを実行してハードウェアクロック時刻を確認します。
sudo hwclock
以下のような出力が表示されますが、これは正しい日付/時刻ではありません。

- ステップ 5: 以下のコマンドを入力して、ハードウェアクロック時刻を現在のシステムクロック時刻に変更します。
sudo hwclock --systohc
- ステップ 6: インターネットから時刻を取得しないようにするため、接続されているイーサネットケーブルをすべて取り外し、ボードを再起動します。
sudo reboot
-
ステップ 7: ハードウェアクロック時刻を確認して、デバイスの電源がオフになっても日付/時刻が同じままであることを確認します。
-
ステップ 8: お好みのテキストエディタを使用して新しいシェルスクリプトを作成します。ここでは vi テキストエディタを使用します。
sudo vi /usr/bin/hwtosys.sh
- ステップ 9: i を押して挿入モードに入り、以下の内容をファイル内にコピー&ペーストします。
#!/bin/bash
sudo hwclock --hctosys
- ステップ 10: スクリプトを実行可能にします。
sudo chmod +x /usr/bin/hwtosys.sh
- ステップ 11: systemdファイルを作成します。
sudo nano /lib/systemd/system/hwtosys.service
- ステップ 12: ファイル内に以下を追加します。
[Unit]
Description=Change system clock from hardware clock
[Service]
ExecStart=/usr/bin/hwtosys.sh
[Install]
WantedBy=multi-user.target
- ステップ 13: systemctl デーモンをリロードします。
sudo systemctl daemon-reload
- ステップ 14: 新しく作成したサービスを起動時に開始するように有効化し、サービスを開始します。
sudo systemctl enable hwtosys.service
sudo systemctl start hwtosys.service
- ステップ 15: スクリプトがsystemdサービスとして起動し、実行されていることを確認する。
sudo systemctl status hwtosys.service
- ステップ 16: ボードを再起動すると、システムクロックがハードウェアクロックと同期されていることが確認できます。
ファン制御
nvfancontrolは、ユーザースペースのファン速度制御デーモンです。これは、nvfancontrol設定ファイル内の温度対ファン速度マッピングテーブルに基づいてファン速度を管理します。
nvfancontrolサービスには、Tmargin、キックスタートPWM、ファンプロファイル、ファン制御、ファンガバナーなど、いくつかの基本要素があります。これらはすべて、ユーザーの好みに基づいて設定ファイルを介してプログラムできます。この章では、以下のセクションでそれぞれについて説明します。
nvfancontrol.confを変更したい場合は、必ずこちらを読んでください
使用方法
- Method 1
- Method 2
- ステップ 1: nvfancontrol systemdサービスを停止します。
sudo systemctl stop nvfancontrol
- ステップ 2: nvfancontrol.conf を変更します。
vi /etc/nvfancontrol.conf
nvfancontrol.confを変更した後、Escと:qを入力して終了してください
- ステップ3: ステータスファイルを削除します。
sudo rm /var/lib/nvfancontrol/status
- ステップ 4: nvfancontrol systemd サービスを再起動します。
sudo systemctl restart nvfancontrol
- ステップ 1: rootモードに入る。
sudo -i
- ステップ 2: nvfancontrol systemd サービスを停止します。
sudo systemctl stop nvfancontrol
- ステップ 3: PWM値を変更します。
echo 100 > /sys/devices/platform/pwm-fan/hwmon/hwmon3/pwm1
値が大きいほど、ファンの速度が速くなります。PWM値は0から255の間である必要があります。hwmon3があなたのパスワードではない可能性があるので、自分のパスワードを確認してください
- ステップ4: rpmを確認します。
cat /sys/class/hwmon/hwmon0/rpm
GPIO
40ピンヘッダーの詳細は以下の通りです:
| ヘッダーピン | モジュールピン名 | モジュールピン | SoCピン名 | デフォルト用途 | 代替機能 |
|---|---|---|---|---|---|
| 1 | - | - | - | メイン3.3V電源 | - |
| 2 | - | - | - | メイン5.0V電源 | - |
| 3 | I2C1_SDA | 191 | DP_AUX_CH3_N | I2C #1 データ | - |
| 4 | - | - | - | メイン5.0V電源 | - |
| 5 | I2C1_SCL | 189 | DP_AUX_CH3_P | I2C #1 クロック | - |
| 6 | - | - | - | グランド | - |
| 7 | GPIO09 | 211 | AUD_MCLK | GPIO | オーディオマスタークロック |
| 8 | UART1_TXD | 203 | UART1_TX | UART #1 送信 | GPIO |
| 9 | - | - | - | グランド | - |
| 10 | UART1_RXD | 205 | UART1_RX | UART #1 受信 | GPIO |
| 11 | UART1_RTS* | 207 | UART1_RTS | GPIO | UART #2 送信要求 |
| 12 | I2S0_SCLK | 199 | DAP5_SCLK | GPIO | オーディオI2S #0 クロック |
| 13 | SPI1_SCK | 106 | SPI3_SCK | GPIO | SPI #1 シフトクロック |
| 14 | - | - | - | グランド | - |
| 15 | GPIO12 | 218 | TOUCH_CLK | GPIO | - |
| 16 | SPI1_CSI1* | 112 | SPI3_CS1 | GPIO | SPI #1 チップセレクト #1 |
| 17 | - | - | - | GPIO | - |
| 18 | SPI1_CSI0* | 110 | SPI3_CS0 | GPIO | SPI #0 チップセレクト #0 |
| 19 | SPI0_MOSI | 89 | SPI1_MOSI | GPIO | SPI #0 マスター出力/スレーブ入力 |
| 20 | - | - | - | グランド | - |
| 21 | SPI0_MISO | 93 | SPI1_MISO | GPIO | SPI #0 マスター入力/スレーブ出力 |
| 22 | SPI1_MISO | 108 | SPI3_MISO | GPIO | SPI #1 マスター入力/スレーブ出力 |
| 23 | SPI0_SCK | 91 | SPI1_SCK | GPIO | SPI #0 シフトクロック |
| 24 | SPI0_CS0* | 95 | SPI1_CS0 | GPIO | SPI #0 チップセレクト #0 |
| 25 | - | - | - | グランド | - |
| 26 | SPI0_CS1* | 97 | SPI1_CS1 | GPIO | SPI #0 チップセレクト #1 |
| 27 | I2C0_SDA | 187 | GEN2_I2C_SDA | I2C #0 データ | GPIO |
| 28 | I2C0_SCL | 185 | GEN2_I2C_SCL | I2C #0 クロック | GPIO |
| 29 | GPIO01 | 118 | SOC_GPIO41 | GPIO | 汎用クロック #0 |
| 30 | - | - | - | グランド | - |
| 31 | GPIO11 | 216 | SOC_GPIO42 | GPIO | 汎用クロック #1 |
| 32 | GPIO07 | 206 | SOC_GPIO44 | GPIO | PWM |
| 33 | GPIO13 | 228 | SOC_GPIO54 | GPIO | PWM |
| 34 | - | - | - | グランド | - |
| 35 | I2S0_FS | 197 | DAP5_FS | GPIO | オーディオI2S #0 フィールドセレクト |
| 36 | UART1_CTS* | 209 | UART1_CTS | GPIO | UART #1 送信許可 |
| 37 | SPI1_MOSI | 104 | SPI3_MOSI | GPIO | SPI #1 マスター出力/スレーブ入力 |
| 38 | I2S0_DIN | 195 | DAP5_DIN | GPIO | オーディオI2S #0 データ入力 |
| 39 | - | - | - | グランド | - |
| 40 | I2S0_DOUT | 193 | DAP5_DOUT | GPIO | オーディオI2S #0 データ出力 |
UART
UARTは、Universal Asynchronous Receiver/Transmitterの略です。これは、2つのデバイス間でのシリアル通信に使用される通信プロトコルです。UART通信には2つのピンが関与します:データを送信するためのピン(TX)とデータを受信するためのピン(RX)です。これは非同期であり、デバイス間で共有クロック信号なしでデータが送信されることを意味します。UARTは、マイクロコントローラー、センサー、および異なる電子デバイス間の通信など、さまざまなアプリケーションで一般的に使用されています。
接続概要
UARTインターフェースは以下のピンを使用しています。または、J401の別のUARTインターフェースを使用することもできます:
| ヘッダーピン | モジュールピン名 | モジュールピン | SoCピン名 | デフォルト用途 | 代替機能 |
|---|---|---|---|---|---|
| 6 | - | - | - | グラウンド | - |
| 8 | UART1_TXD | 203 | UART1_TX | UART #1 送信 | GPIO |
| 10 | UART1_RXD | 205 | UART1_RX | UART #1 受信 | GPIO |
以下のようにJ401をTTLとUARTで接続します:
| J401 ヘッダーピン | 用途 | USB変換TTL | 用途 |
|---|---|---|---|
| 6 | グラウンド | GND | グラウンド |
| 8 | UART1_TXD | U_RX | UART_RX |
| 10 | UART1_RXD | U_TX | UART_TX |
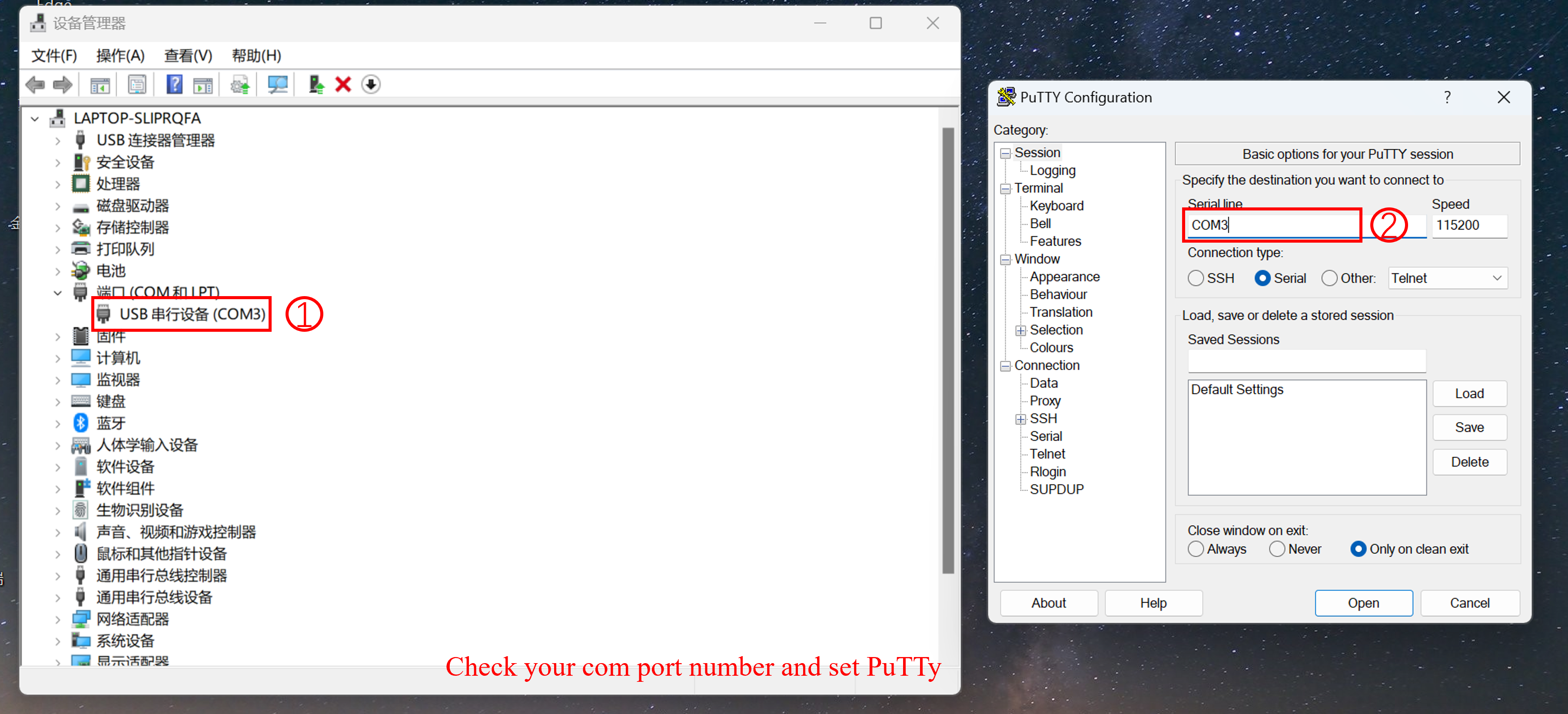
使用方法
- ステップ 1: Windows ラップトップに PuTTy をインストールし、以下のように PuTTy を設定します:
- ステップ 2: Jetson に PuTTy をインストールし、ターミナルを開いて(ALT+Ctrl+T)以下のコマンドを入力します。
sudo apt install putty
- ステップ 3: Windows上のPuTTyを使用してJetsonに'hello linux'を送信し、Jetson上のPuTTyを使用してWindowsに'hello windows'を送信します。
ボーレートが115200に設定されていることを確認してください。
結果は以下の通りです:
I2C
I2Cは Inter-Integrated Circuit の略です。これは、システム内の複数の集積回路間の通信を可能にする広く使用されているシリアル通信プロトコルです。I2Cは2つの双方向ライン(データ用のSDAとクロック用のSCL)を使用します。I2Cバスに接続されたデバイスは、マスターまたはスレーブとして動作でき、複数のデバイスが相互に通信することを可能にします。I2Cは、その簡潔性、柔軟性、および組み込みシステムや電子機器において、センサー、メモリチップ、その他の周辺機器などの様々なデバイスを接続する能力で人気があります。
接続概要
I2Cインターフェースは以下のピンを使用しています。または、J401上の他のI2Cインターフェースを使用することもできます:
| ヘッダーピン | モジュールピン名 | モジュールピン | SoCピン名 | デフォルト用途 | 代替機能 |
|---|---|---|---|---|---|
| 2 | - | - | - | メイン5.0V電源 | - |
| 3 | I2C1_SDA | 191 | DP_AUX_CH3_N | I2C #1 データ | - |
| 5 | I2C1_SCL | 189 | DP_AUX_CH3_P | I2C #1 クロック | - |
| 6 | - | - | - | グラウンド | - |
J401をGrove-3軸デジタル加速度計にI2Cで以下のように接続します:
| J401 | 用途 | Grove-3軸デジタル加速度計 | 用途 |
|---|---|---|---|
| 2 | 5V電源 | Vcc | - |
| 3 | I2C1_SDA | SDA | I2C_SDA |
| 5 | I2C1_SCL | SCL | I2C_SCL |
| 6 | グランド | GND | グランド |
テスト
ターミナルを開き(ALT+Ctrl+T)、以下のコマンドを入力します:
i2cdetect -y -r 7
コマンド i2cdetect -y -r x では、あなたのチャンネルは私のものと異なる場合があります。
以下のような結果が表示されます。I2Cに接続する前は、チャンネル7でI2Cデバイスが検出されませんでしたが、接続後はアドレス0x19のI2Cデバイスが検出されました。:

汎用IOピンをロジック制御に使用したい場合は、このwikiを参照してください。
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。