Mini AI Computer T906を始める

Mini AI Computer T906は、最大200TOPSのAI性能を提供するJetson AGX Orin 32GBモジュールで構築されており、エッジでの最も複雑なAIワークロードに対応できます。Jetpack 5.0.2がプリインストールされ、NVIDIA JetPackおよびDeepStream SDK、TensorRT、RIVA、Issacソフトウェアライブラリ、そしてSeeed Edge AIエコシステムの主要なAIプラットフォームツールによってサポートされているため、製造、配送、小売、スマートシティなどのAIアプリケーションを簡単に開発・展開できます。
Mini AI Computer T906では、10GbEと1GbEのイーサネットポートによる高速ネットワークアクセスが可能です。ビデオ分析のために最大10ストリームを有効にできます。
内蔵キャリアボードには、GPSモジュール用のインターフェース、SSD拡張用のM.2 Key M、wifiモジュール用のM.2 Key B、5Gモジュール用のM.2 Key E、4Gモジュール用のMini PCIeも用意されています。
3つのRS232と優れた放熱・筐体保護により、T906はエネルギー効率の高い自律機械の構築に最適です。
最大10ギガビットイーサネットと超長MTBF安定動作により、この高性能コンピュータは高度な分析を可能にしながら、数十台のIPカメラからの複数の同時ストリームを処理する能力を提供します。Wi-Fi無線機能を搭載し、Bluetooth、4G・5Gモジュール構成、GPSナビゲーションをサポートします。
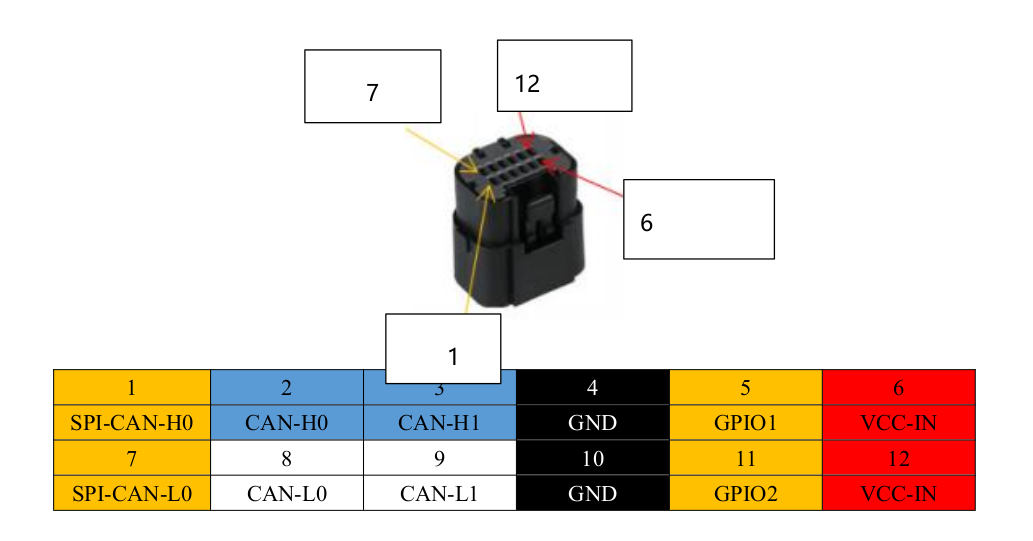
3つのCAN FDと2つのGPIOを備えたJEG車両レベルコネクタを装備しており、複数のレーダーセンサーを入力できます。また、GMSLカメラコネクタも搭載されており、カメラセンサーハブ、制御ユニット、またはビデオトランスコーディングユニットの構築に活用できます。このエッジAIボックスは、自動運転、自律移動ロボット(AMR)、または無人地上車両の遠隔操作を実装できます。
豊富な産業用インターフェースセットを備えています:標準RS232×1、UART用RS232×1、Time SYNC トリガー用RS232×1。
超強力で軽量なアルミニウム合金で覆われ、高度な保護のためにIP55として設計されており、強力な冷却機能のための2つのオンボードファンを備えたパッシブ放熱として設計されています。Jetpack 5.0.2がプリインストールされたこの優れたコンピューティングプラットフォームは、無人清掃車、無人配送車、インテリジェント検査、AGV、その他の無人運転分野への展開準備が整っています。
機能
- NVIDIA® JETSON AGX ORIN™を搭載
- M.2 KEY M (PCIEX4 NVME 2280)をサポート
- M.2 KEY E (PCIEX1 2230)をサポート
- 8台のGMSL2カメラをサポート* (GMSL2アダプターボードは別途購入が必要)
- 複数のインターフェースをサポート (例:CAN/USB/Ethernet/同期信号/シリアル/GPIOなど)
- デュアルバンドWIFI/Bluetooth/4G/5Gモジュールをサポート
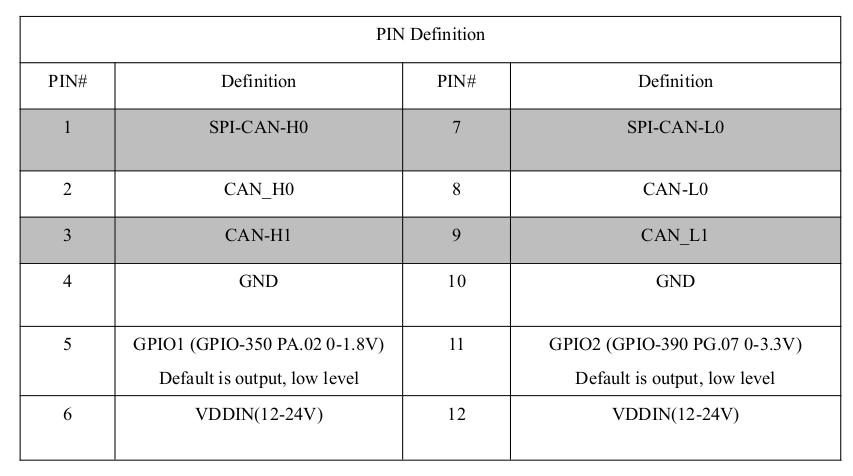
- 日本JAE自動車グレードIOプラグ (1xPOWER、3xCAN、2xGPIO)
- ファンおよびパッシブ冷却設計
- ubuntu 20.04システムとJETPACK SDKSを内蔵
仕様
モジュール | Jetson AGX Orin 32GB |
AI性能 | 200 TOPS |
CPU | 8コア Arm® Cortex®-A78AE v8.2 64ビット CPU 2MB L2 + 4MB L3 |
GPU | 1792コア NVIDIA Ampereアーキテクチャ GPU(56 Tensor Core搭載) |
メモリ | 32GB 256-bit LPDDR5 204.8GB/s |
ストレージ | 64GB eMMC 5.1 1 x m.2 key m nvme 2280 コネクタ |
ディスプレイ | 1*HDMI Type A |
ビデオエンコード | 1x 4K60 (H.265) 3x 4K30 (H.265) 6x 1080p60 (H.265) 12x 1080p30 (H.265) |
ビデオデコーダー | 1x 8K30 (H.265) 2x 4K60 (H.265) 4x 4K30 (H.265) 9x 1080p60 (H.265) 18x 1080p30 (H.265) |
ギガビットイーサネット | 1x 10GbE 1x 1GbE |
Wifi/BlueTooth | 1x M.2 KEY B (2230) WiFi/Bluetooth対応 1x M.2 KEY E 5G対応 1 mini PCIe 4G用 (モジュールは含まれません) |
GPS | GPS対応(モジュールは含まれません) |
USB | 4x USB 3.0 Type Aコネクタ; 1x USB 2.0 TYPE-Cポート(デバイスモード用); 1x USB 2.0 TYPE-Cポート(デバッグ用) |
産業用インターフェース | 3xCAN(CANチップ付き) |
2xGPIO | |
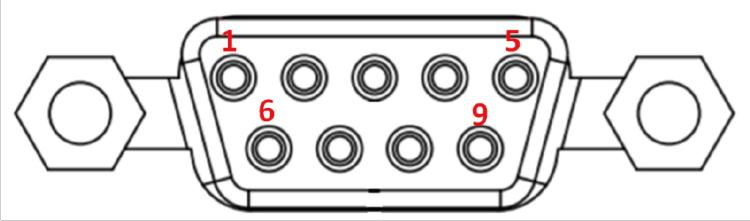
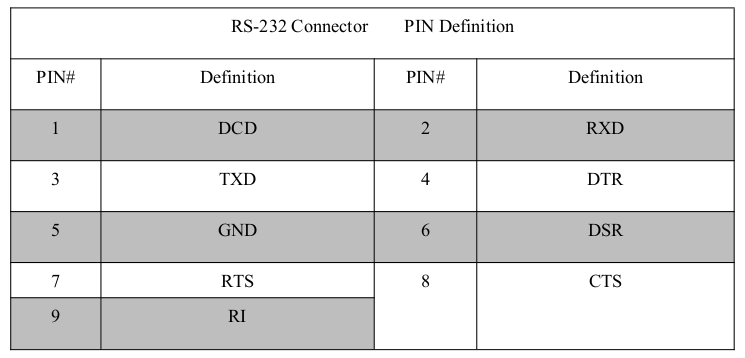
2x RS-232 D-SUB9 1 xTIME SYNC(RS232) | |
カメラ | GMSL 2 カメラコネクタ(GMSL1対応、アダプターボードは別途購入が必要) |
RTC | 充電式バッテリー付きRTCコネクタ |
FAN | 2* FAN |
LED | 2x ステータスインジケーターLED |
ボタン | 電源キー リセットキー リカバリーキー |
OS | JetPack 5.0.2 |
電源 | 9-36v JAE(MX23A12SF1) 標準電力 45W 最大 75W |
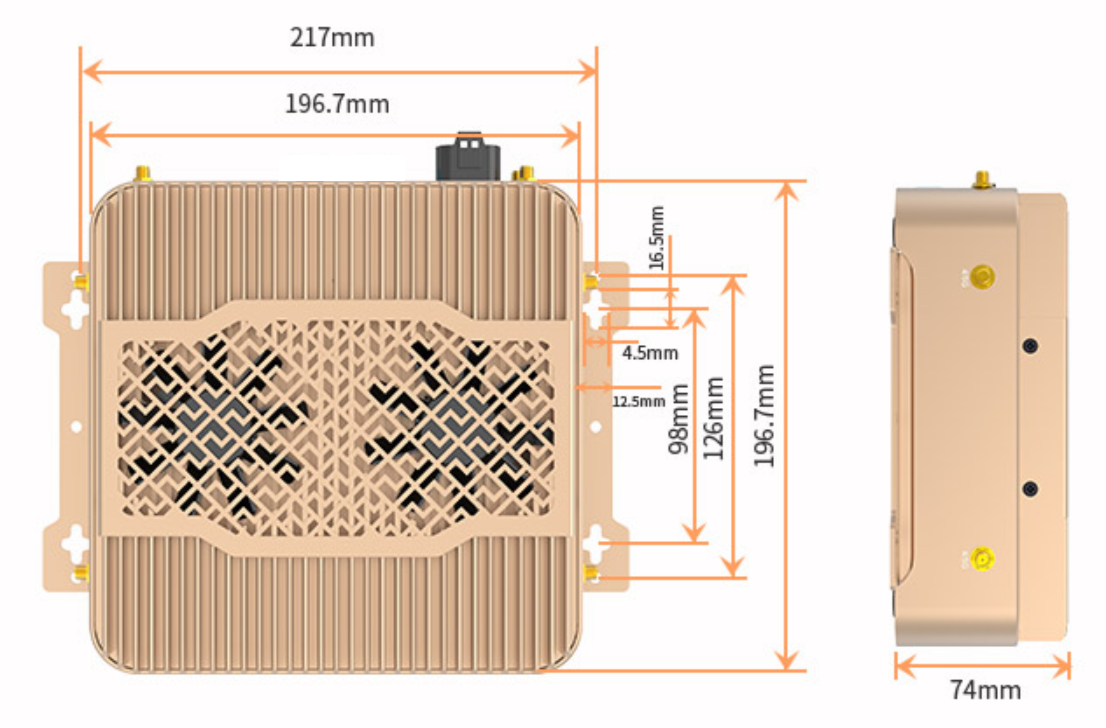
機械的仕様 | 196.719674mm 2.5kg -20℃-55℃ |
ハードウェア概要


寸法
ハードウェア説明
シリアルポート
多機能インターフェース
オペレーティングシステムのフラッシュ
!!! Note Mini AI Computer T906には、Jetson AGX OrinモジュールのEMMCにJetpack 5.0.2がプリインストールされており、すぐに独自のアプリケーション開発を開始できます。次のセクションにスキップできます。 このデバイスにOSをフラッシュしたい場合は、このシステムのキャリアボードがカスタム設計されているため、関連するドライバーをダウンロードしてインストールする必要があることにご注意ください。
必要なハードウェア
開始する前に、以下のハードウェアを準備する必要があります
- Ubuntu 18.04 OSまたはUbuntu 20.04 OSを搭載したLinuxホストコンピュータ
- Mini AI Computer T906
- 電源アダプタ(付属)
- キーボードとマウス
- 1 x USB Type-Cケーブル(付属)
Mini AI Computer T906をリカバリモードに設定
-
ステップ1. Mini AI Computer T906をシステム電源に接続します。
-
ステップ2. USB Type-Cケーブルを使用してMini AI Computer T906をubuntuホストに接続します(一端をMini AI Computer T906のOTGポートに、もう一端をubuntuホストのUSB 3.0ソケットに接続)。
-
ステップ3. Mini AI Computer T906に設定された電源を使用してシステムの電源を入れます。
-
ステップ4. リカバリボタンを押してから、Mini AI Computer T906のリセットボタンを押し続けます。
-
ステップ5. 2秒後にリセットボタンを離し、最後にリカバリボタンを離します。この時点でT906はリカバリモードに入ります(Ubuntuホストで
lsusbコマンドを実行してNvidia Corpデバイスがあるかどうかを確認できます)。
!!! Note USBリカバリモードに入ると、システムは起動せず、シリアルポートからデバッグ情報の出力もありません。
Mini AI Computer T906にOSをダウンロードしてフラッシュ
-
ステップ1. Source Forge Repoからシステムイメージファイルをダウンロードします。
-
ステップ2. Ubuntuホストコンピュータの
ターミナルで以下のコマンドを実行します:
#extract archive
sudo tar -zxvf T906_JP5.0.2.tar.gz
#Enter the L4T folder
cd Linux_for_Tegra
#Start Flashing OS
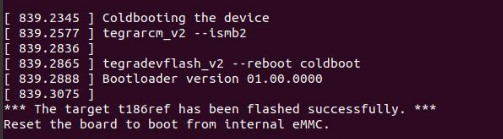
sudo . /flash.sh jetson-agx-orin-devkit mmcblk0p1
Terminalの出力で同様のメッセージが表示されるはずです。
周辺機器
Wi-Fi接続
!!! Note Mini AI Computer T906にはWiFiモジュールが付属していません。
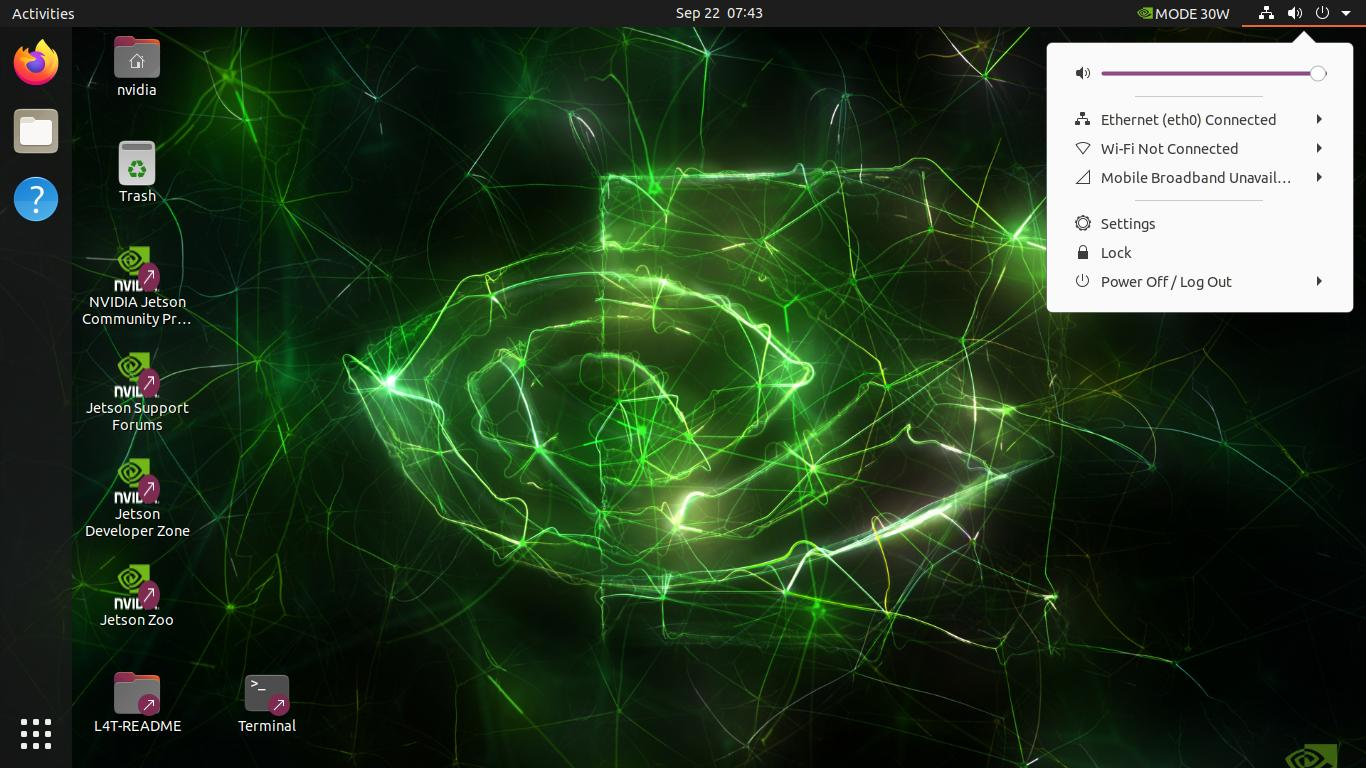
- ステップ 1. システムが起動した後、矢印で示されているネットワークアイコンをクリックすると、ネットワーク設定が表示されます。
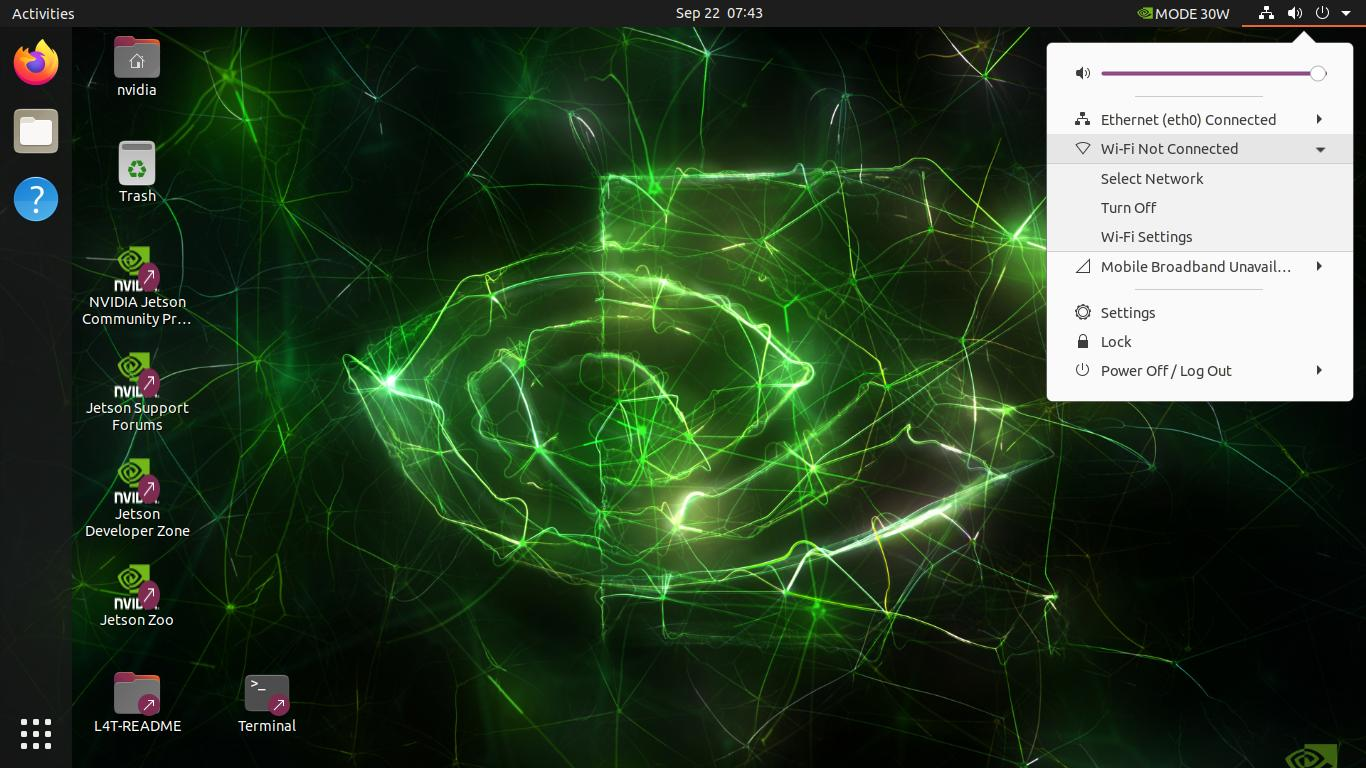
- ステップ 2. Wi-Fiセクションで
Select Networkを選択してクリックしてください。
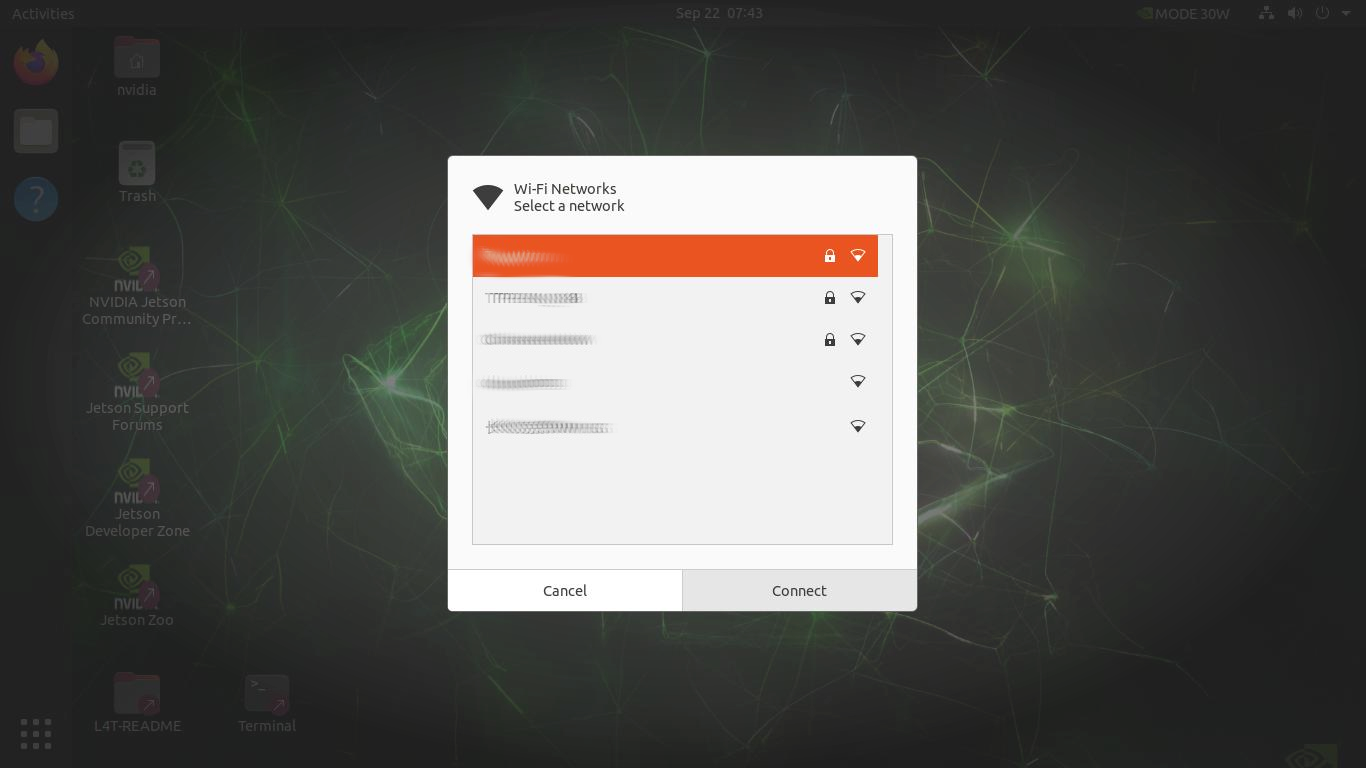
- ステップ 3. プロンプトウィンドウでWi-Fiネットワークを選択し、
connectをクリックしてください。
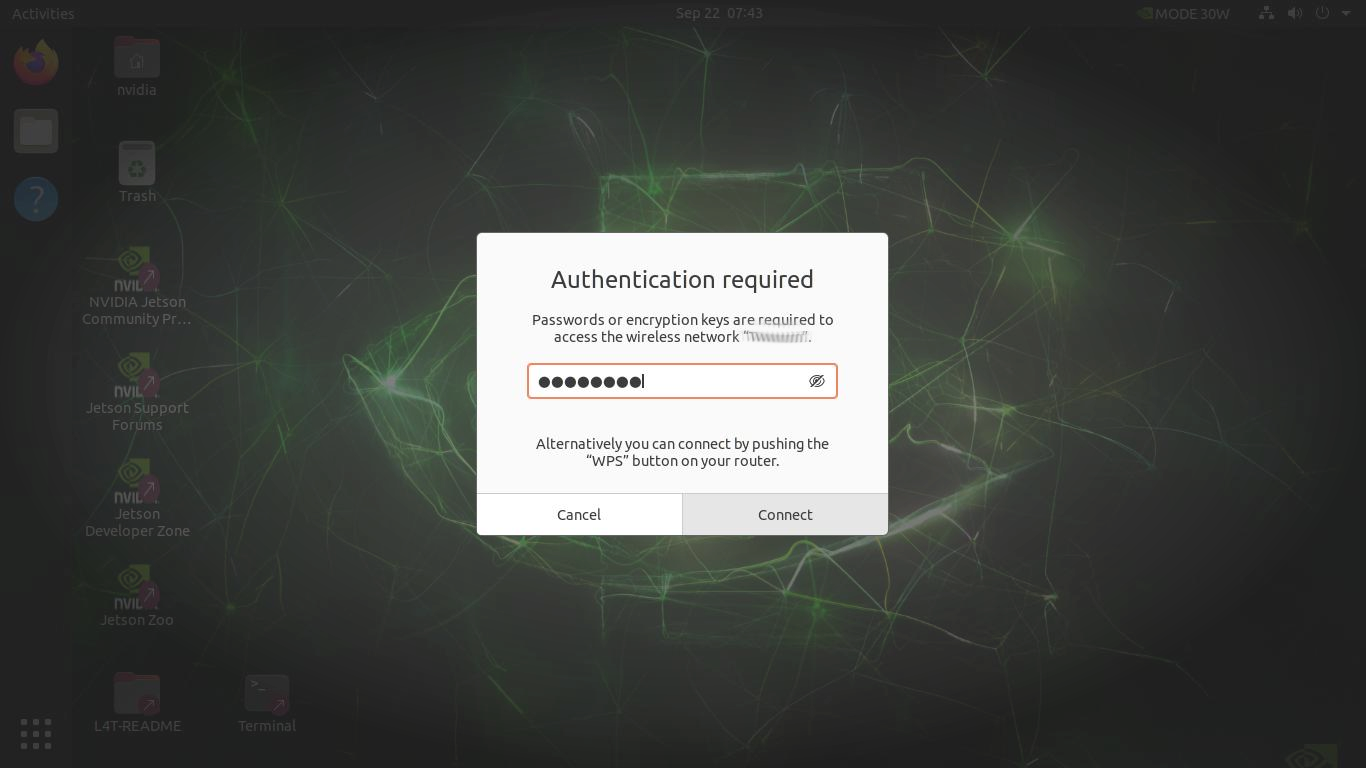
- ステップ 4.
Authentication requiredウィンドウでWi-Fiパスワードを入力してください。
4Gダイヤルアップネットワーク
!!! Note Mini AI Computer T906には4Gモジュールが付属していません。以下の手順はNeoway N720 4Gモジュールを使用して実行されています。
- ステップ 1. 4Gモジュールドライバーをダウンロードしてパッケージを解凍し、
Terminalを使用してドライバーを/etc/ppp/peersにコピーしてください:
wget -o- https://files.seeedstudio.com/wiki/AI_Computer_T906/4g_dail.zip
unzip 4g_dail.zip
sudo cp -f 4g_dail_script/* /etc/ppp/peers
- ステップ 2. /etc/ppp/peers ディレクトリに移動し、n720-ppp-dial.sh スクリプトを見つけます。初回実行時には、以下のように実行権限を付与する必要があります。
cd /etc/ppp/peers
sudo chmod +x n720-ppp-dial.sh
sudo ./n720-ppp-dial.sh
ダイヤルアップを停止する必要がある場合は、ppp-kill.shスクリプトを実行して終了できます。
cd /etc/ppp/peers
#turn off dial-up
sudo ./ppp-kill.sh
-
ステップ 3. 4G自動接続機能を実装したい場合は、システム起動時にアプリケーション数を増やすためにrc.localスタートアップスクリプトを設定する必要があります。
-
ステップ 3-1. rc-local.serviceを追加
#create a system service
sudo ln -fs /lib/systemd/system/rc-local.service /etc/systemd/system/rc-local.service
#edit the service file
sudo vi /etc/systemd/system/rc-local.service
viエディタで、iを入力してから以下を入力してください:
[Install]
WantedBy=multi-user.target
Alias=rc-local.service
その後、:wq と入力して保存して終了します。
- ステップ 3-2. rc.local スクリプトを作成する
sudo touch /etc/rc.local
sudo chmod 755 /etc/rc.local
sudo vi /etc/rc.local
viエディタで、iを入力してからcontrol+shift+Vを使用するか、以下のスクリプトを貼り付けます:
#!/bin/bash
LOG_DIR=/var/log/4glog
mkdir -p $LOG_DIR
#4g auto dial if register on network. sleep 30s wait for 4g module prepared
TIME=`date +%Y%m%d%H%M`
echo $TIME >> $LOG_DIR/ppp-dial.log
echo "Auto dial" >> $LOG_DIR/ppp-dial.log
nohup /etc/ppp/peers/n720-ppp-dial.sh >> $LOG_DIR/ppp-dial.log &
sleep 10
#Set default gateway
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
#`route -n | grep ppp0 | grep UG | awk '{print $2}'`
echo $def_gw >> $LOG_DIR/ppp-dial.log
if [ -n "$def_gw" ]; then
#Set default gateway using ppp0/4G
sudo route add default gw $def_gw
else
sleep 10
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
if [ -n "$def_gw" ]; then
sudo route add default gw $def_gw
fi
fi
#Get ppp0 IP
fourg_ip=`/sbin/ifconfig ppp0|grep inet|grep -v 127.0.0.1|grep -v inet6 | awk '{print $2}' | tr -d "addr:"`
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
sleep 15
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
echo "4G no ip $fourg_ip" >> $LOG_DIR/ppp-dial.log
echo $TIME"-Kill pppd and redial" >> $LOG_DIR/ppp-kill.log
nohup /etc/ppp/peers/ppp-kill.sh >> $LOG_DIR/ppp-kill.log &
fi
fi
#end 4g auto dial
#Running maxn mode
/usr/bin/jetson_clocks
exit 0
Webページを開いてテストし、4Gネットワークが接続されているかどうかを確認できます。
GPIO テスト
- ステップ 1. gpio pythonライブラリをインストールします
git clone https://github.com/vitiral/gpio.git
cd gpio/
sudo python3 setup.py install
- ステップ 2. テスト用のPythonスクリプトを作成する
import time
import gpio
tst_gpio_pin = 326 #326 correspond to T906's GPIO2
#tst_gpio_pin = 350 #350 correspond to T906's GPIO1
gpio.setup(tst_gpio_pin, gpio.OUT)
gpio.set(tst_gpio_pin, 0)
print("Starting now! Press CTRL+C to exit")
try:
while True:
gpio.set(tst_gpio_pin, 1)
print("TEST High.")
time.sleep(5)
gpio.set(tst_gpio_pin, 0)
print("TEST Low")
time.sleep(5)
finally:
gpio.cleanup()
- ステップ 3. GPIOピンがHIまたはLOにあるかどうかを次の方法でも確認できます:
sudo cat /sys/kernel/debug/gpio| grep '326'
GPS使用
!!!Note これはGPSモジュールでテストするためのステップです。以下の手順とソフトウェアはHX-26-GNシリーズGPSモジュール用です。GPSモジュールは標準製品には含まれていないため、ご自身で用意していただく必要があることにご注意ください。
- ステップ1. GPSモジュールを取り付け、GPSアンテナをGPSポートに接続してください。

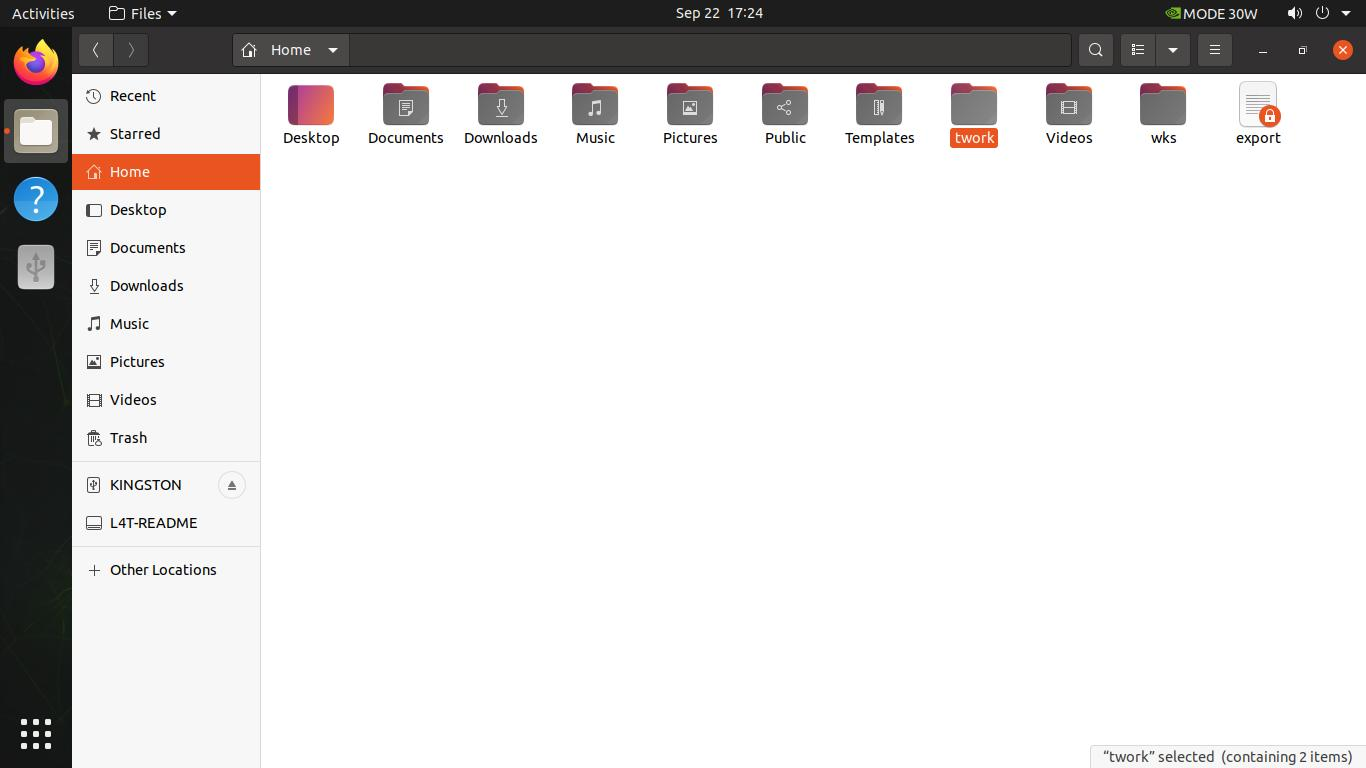
- ステップ2. システムを起動した後、ホーム位置にtworkフォルダが見つかります。それをダブルクリックして開き、マウスの右ボタンをクリックして
Open in Terminalを選択してください。
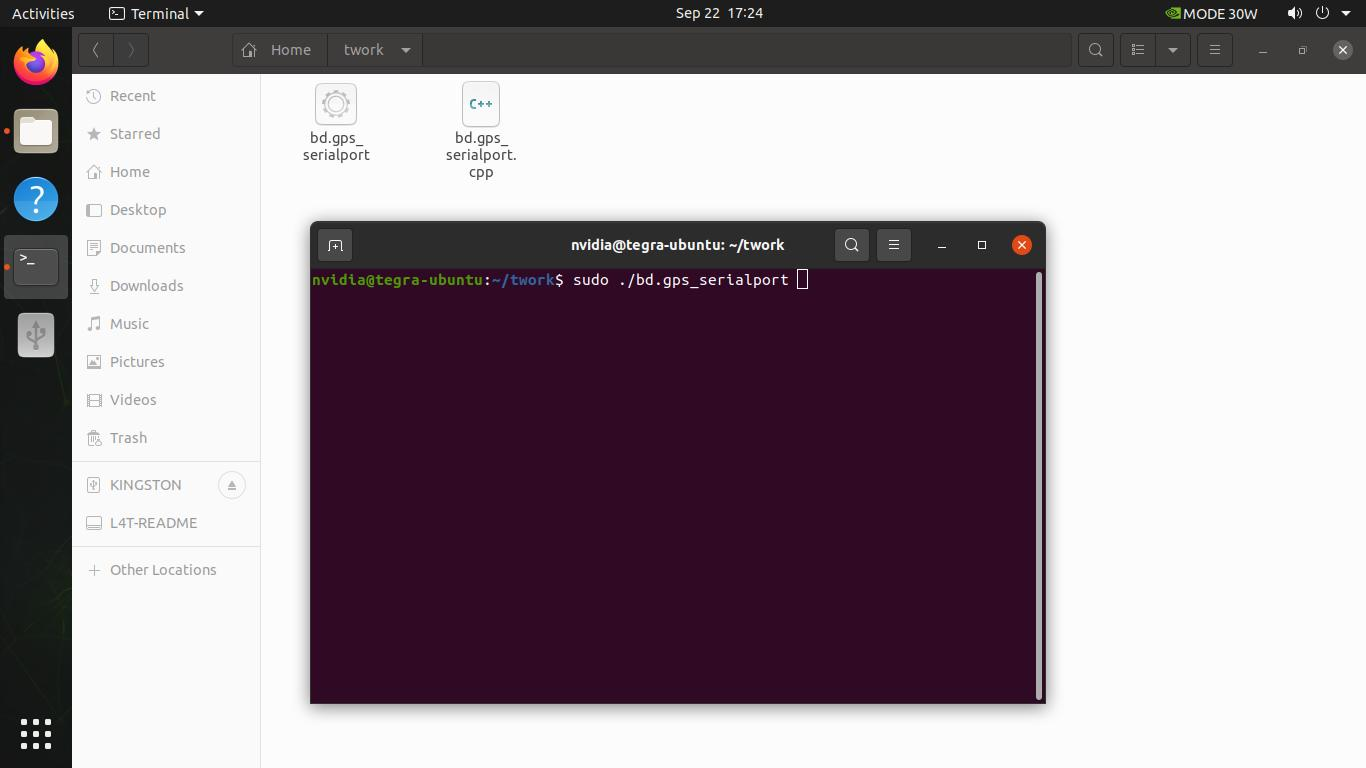
- ステップ3.
Terminalウィンドウで、以下のコマンドを入力してください:
sudo ./bd.gps_serialport
正しい結果は以下のようになるはずです:
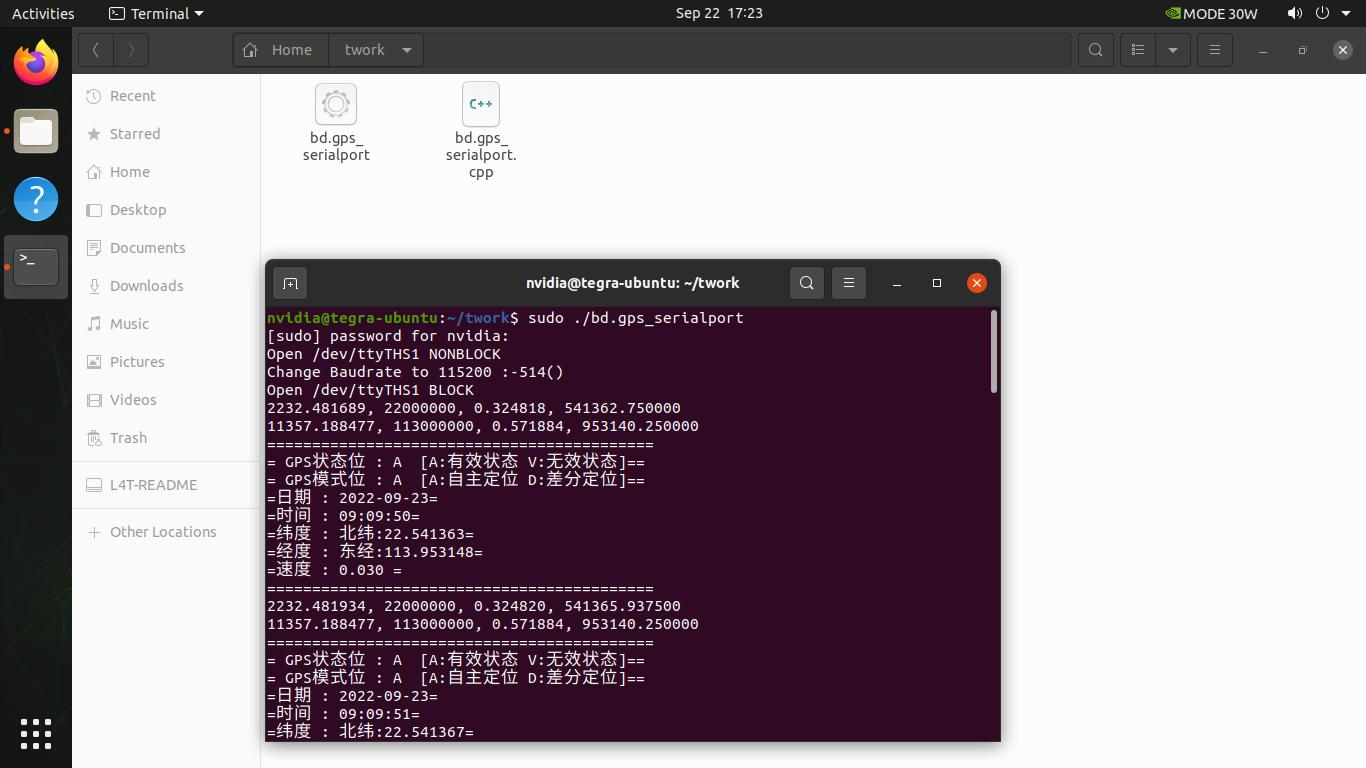
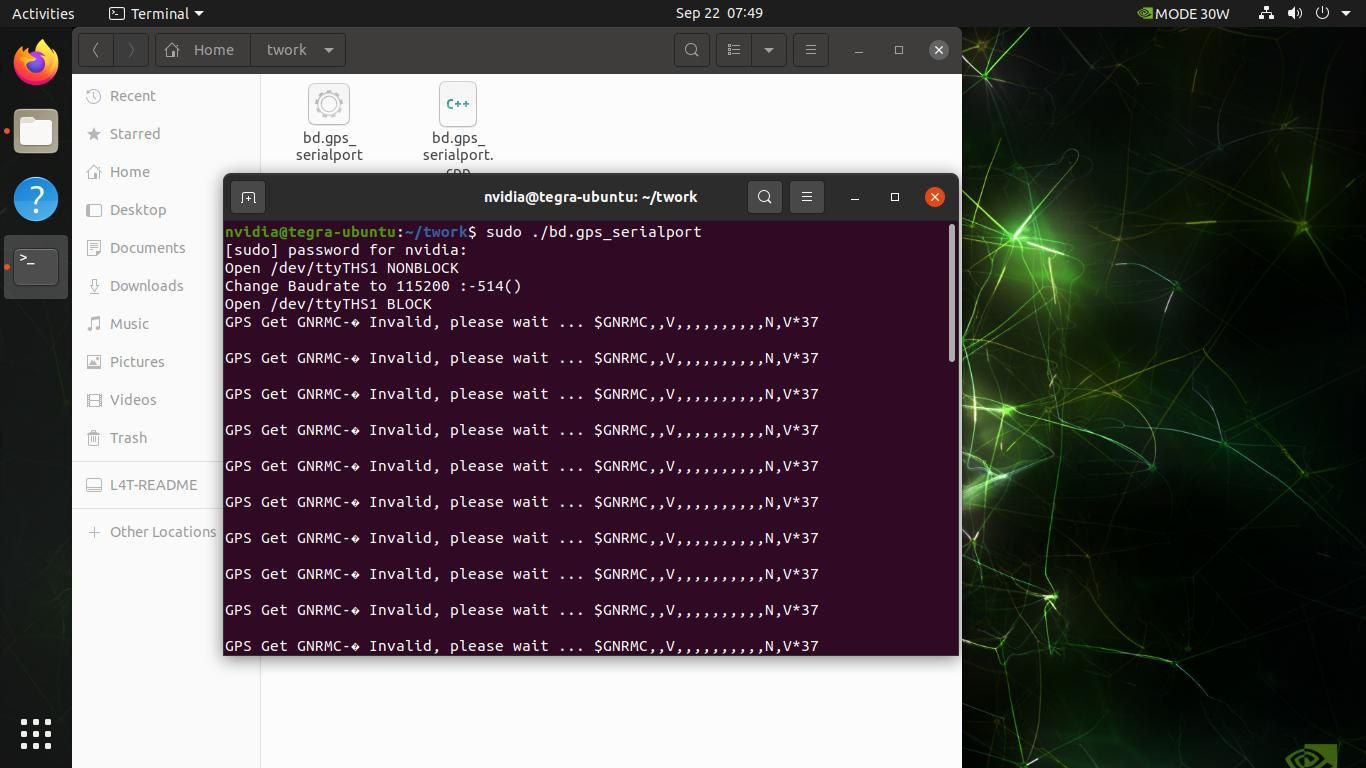
以下の出力が表示される場合は、位置情報の取得が成功していないことを意味します。これは信号が弱くて位置をロックできない可能性があります。開けた場所に移動してユニットをより多くの信号にさらし、位置をロックできるようにしてください。
NVMe SSDをシステムRootfsドライブとして使用する
!!!Note これは、EMMCまたはSDカードをシステムブートパーティションとして使用しながら、NVMe SSDをシステムディスクとして設定してrootfsのストレージサイズを拡張するためのステップです。NVMe SSDは標準製品には含まれていないため、ご自身で用意する必要があります。
-
ステップ 1. SSDを取り付ける
ハードウェア説明書の手順に従って、reComputer用のSSDを取り付けます。
-
ステップ 2. SSDを準備する
ショートカット
Ctrl+Fを使用するか、左上角のUbuntuアイコンをクリックしてディスクを検索し、Ubuntu 18.04に付属のディスクツールを開きます。
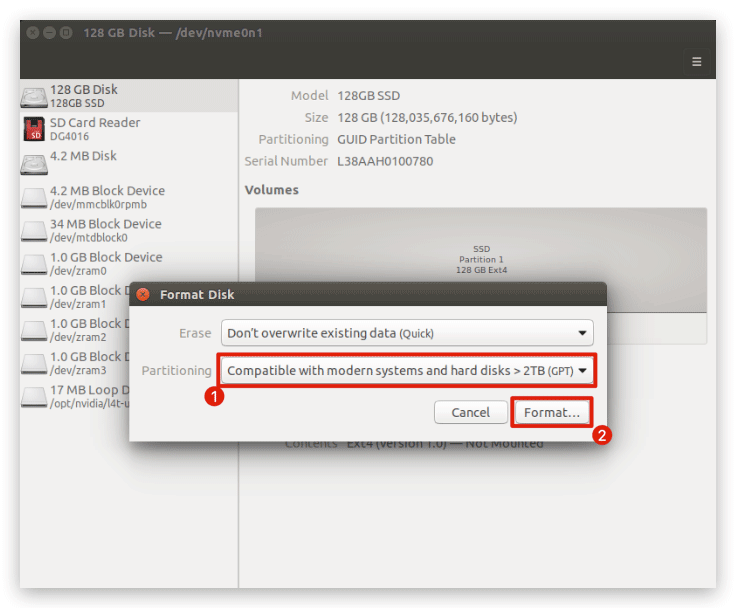
左側でSSDを選択し、メニューバーの右上角にあるディスクのフォーマットを選択します。
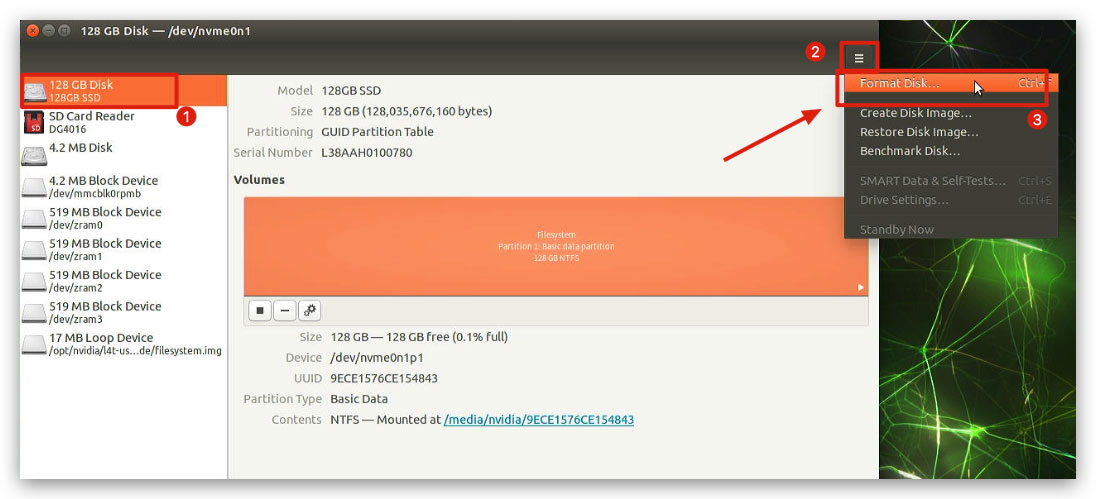
SSDをGPT形式にフォーマットします。確認を求めるポップアップウィンドウが表示され、ユーザーパスワードの入力が求められます。
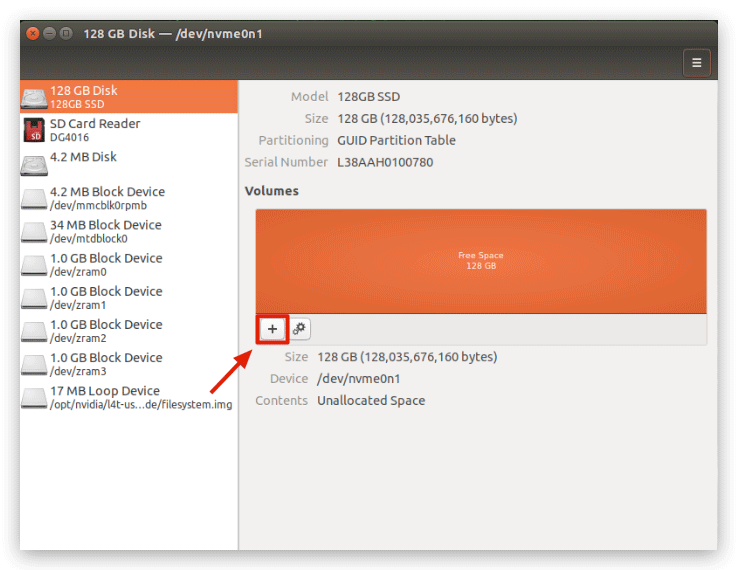
次に、中央の**+**をクリックしてディスク文字を追加します。
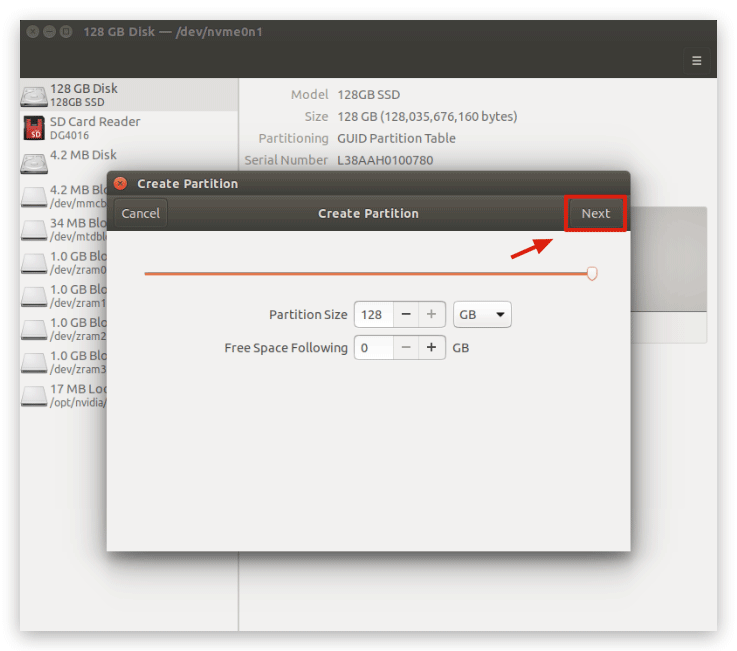
「次へ」をクリックします。
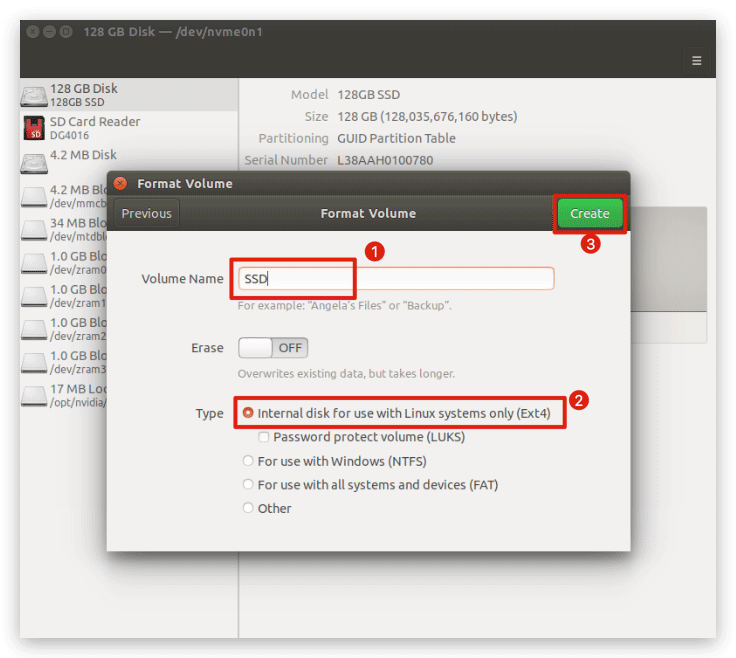
SSDに名前を付け、タイプでExt4を選択して「作成」をクリックしてください。この時点で、拡張要件に従ってSSDの準備が完了しました。
-
ステップ 3. ルートディレクトリをSSDに構築する
gitコマンドを使用して、reComputerで使用する必要があるスクリプトファイルをダウンロードします。
git clone https://github.com/limengdu/rootOnNVMe.git
cd rootOnNVMe/
次に、以下のコマンドを実行してeMMCのルートディレクトリからSSDにファイルをビルドします。この手順の待機時間は、使用しているルートディレクトリのサイズによって異なります。
./copy-rootfs-ssd.sh
-
ステップ 4. 環境を設定し、展開を完了する
以下のコマンドを実行してrootfsの設定を完了します。
./setup-service.sh
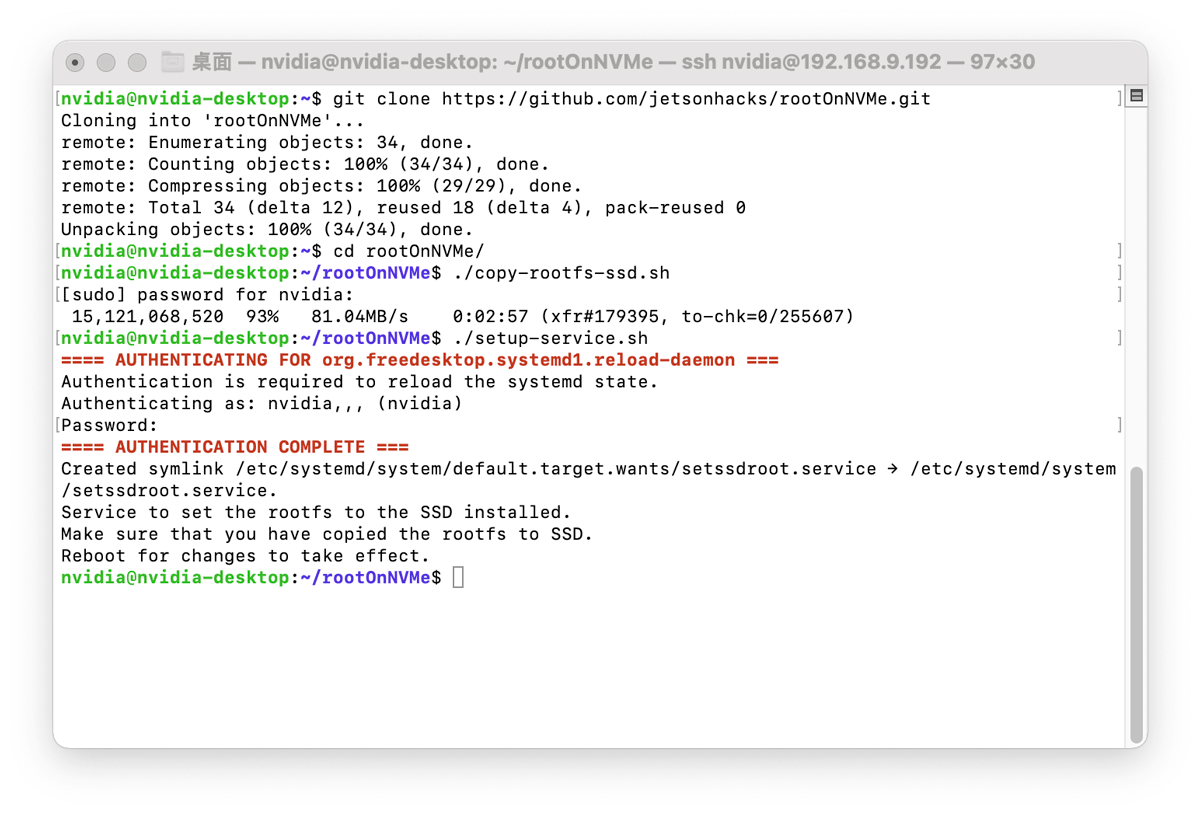
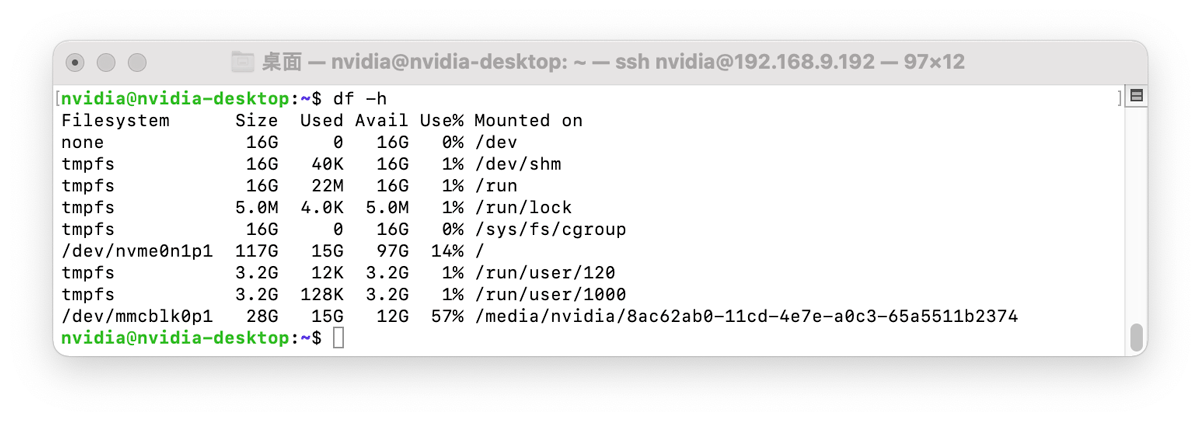
reComputerを再起動すると、メインインターフェースでeMMCが外部ストレージデバイスになっていることがわかり、システムのフットプリントが削減されていることが確認できるため、拡張が成功したことがわかります。
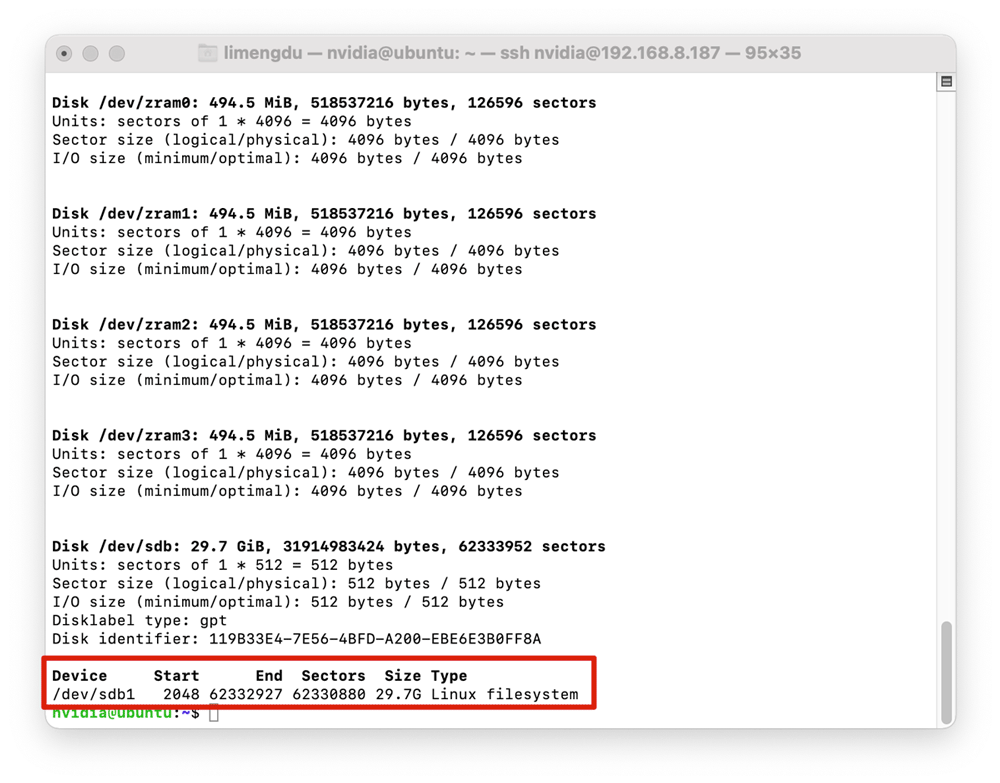
!!!Attention
スクリプトファイルのデフォルトSSDパスは /dev/nvme0n1p1 で、これはreComputerによってデフォルトで割り当てられるパスでもあります。sudo fdisk -l コマンドでSSDパスがこれと一致しないことがわかった場合は、rootOnNVMeの copy-rootfs-ssd.sh、data/setssdroot.service、data/setssdroot.sh ファイル内のすべての /dev/nvme0n1p1 のパスを、あなたのSSDが配置されているパスに変更してください。
上記の拡張では、eMMCから元のルートディレクトリの内容は削除されません。SSDからブートしたくない場合は、SSDを取り外すことができ、システムは依然としてeMMCからブートします。
Resources
技術サポート・製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。