Quantum Mini Linux 開発キット
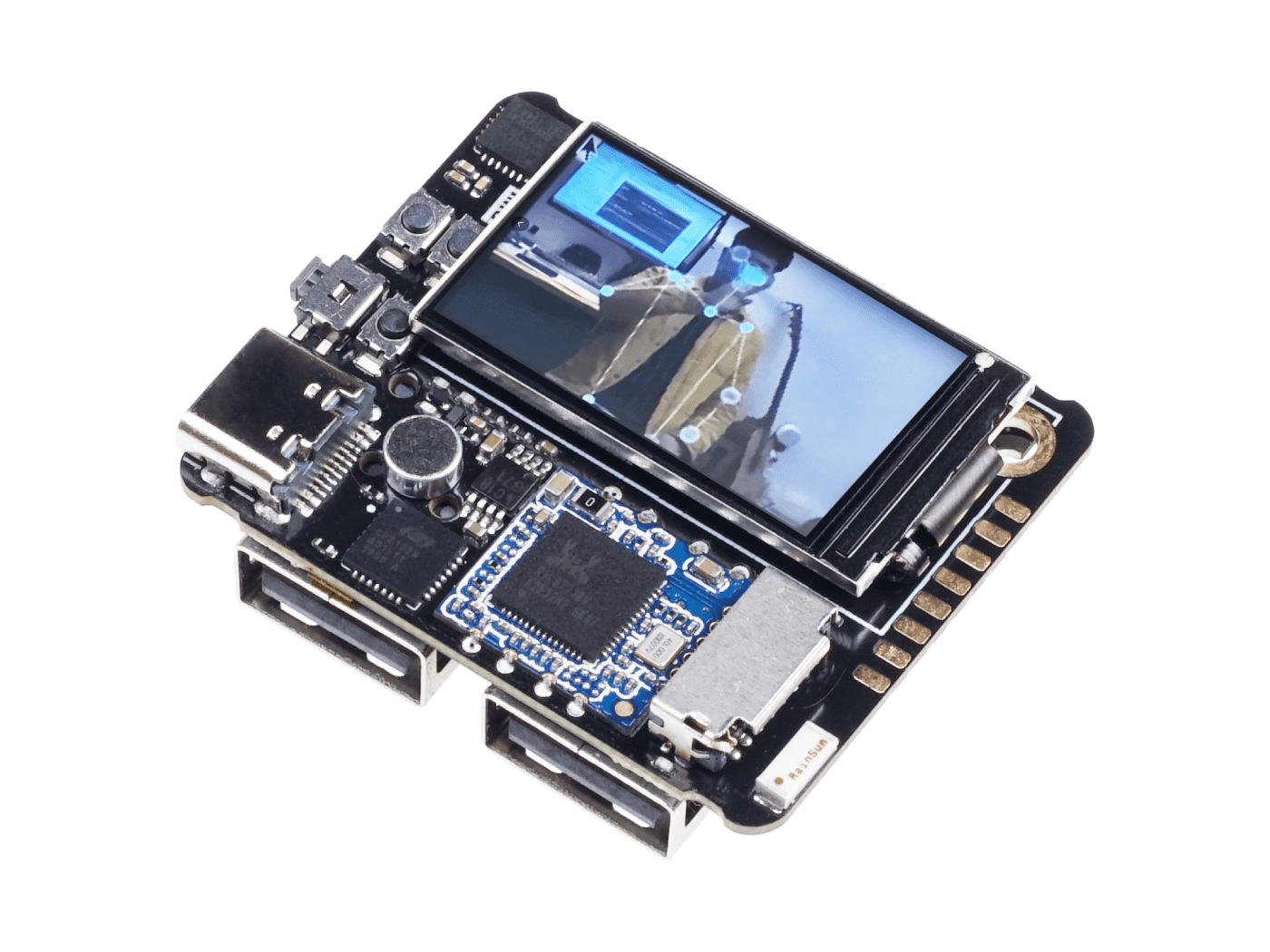
Quantum Mini Linux Dev. Kit は、市場で最も小さなLinux開発ボードの一つで、わずか 40mm x 35mm でLinuxを実行できるクアッドコアCPUを搭載した高度に統合されたキットです。ネットワーク接続機能も含まれています。パーソナルサーバー、インテリジェント音声アシスタント、ロボット開発などのシナリオに適しています。
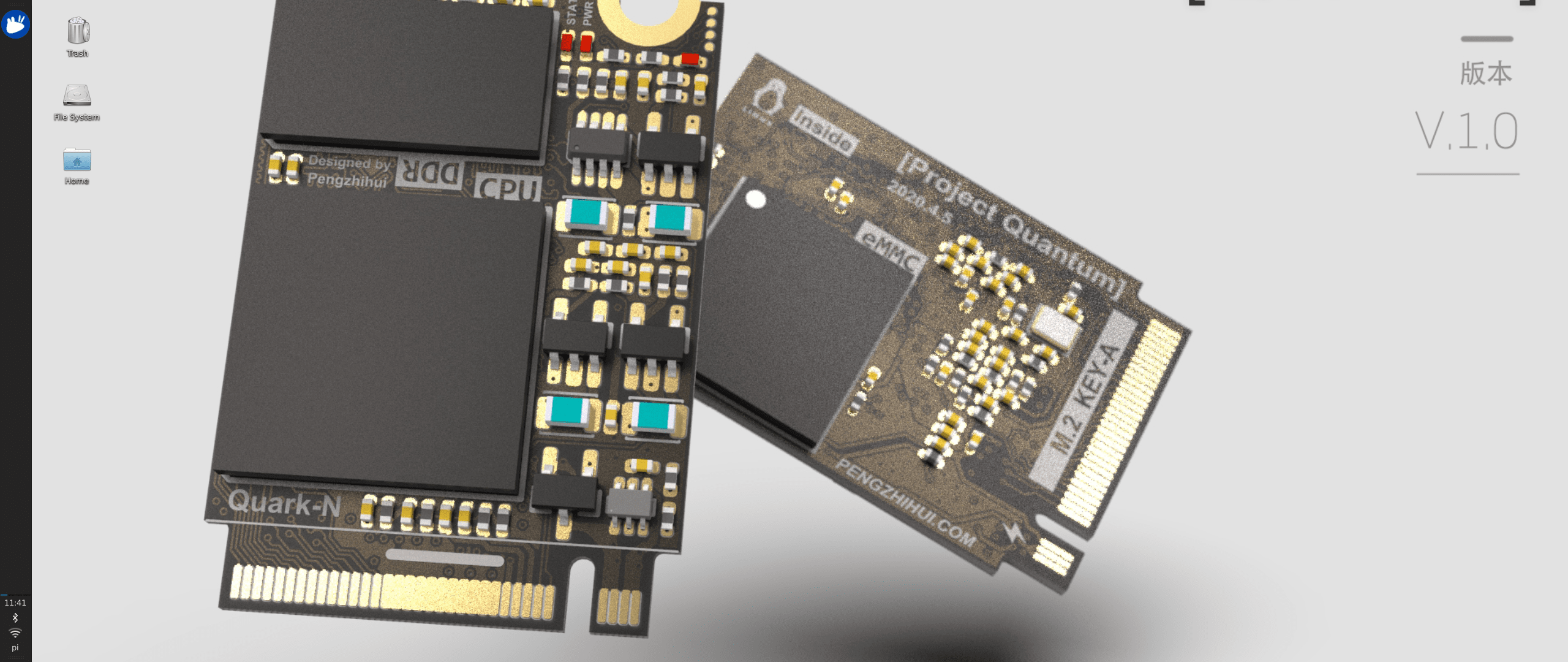
SoMは Quark-N と呼ばれ、Allwinner H3、クアッドコア Cortex-A7、ARM Mali400 MP2 GPU をベースにしています。6層高密度金PCB設計により、完全なARM-Linuxシステム(CPU、DDR、eMMC)を2x3cmのスペースに統合しています。また、ほとんどのGPIOは、M.2 Key-Aゴールドフィンガーインターフェースを通じてボードから引き出され、ベースボード設計の難易度を最小限に抑えています。2層ボードで独自のベースプレートを簡単に設計し、興味深いアイデアを実現できます。
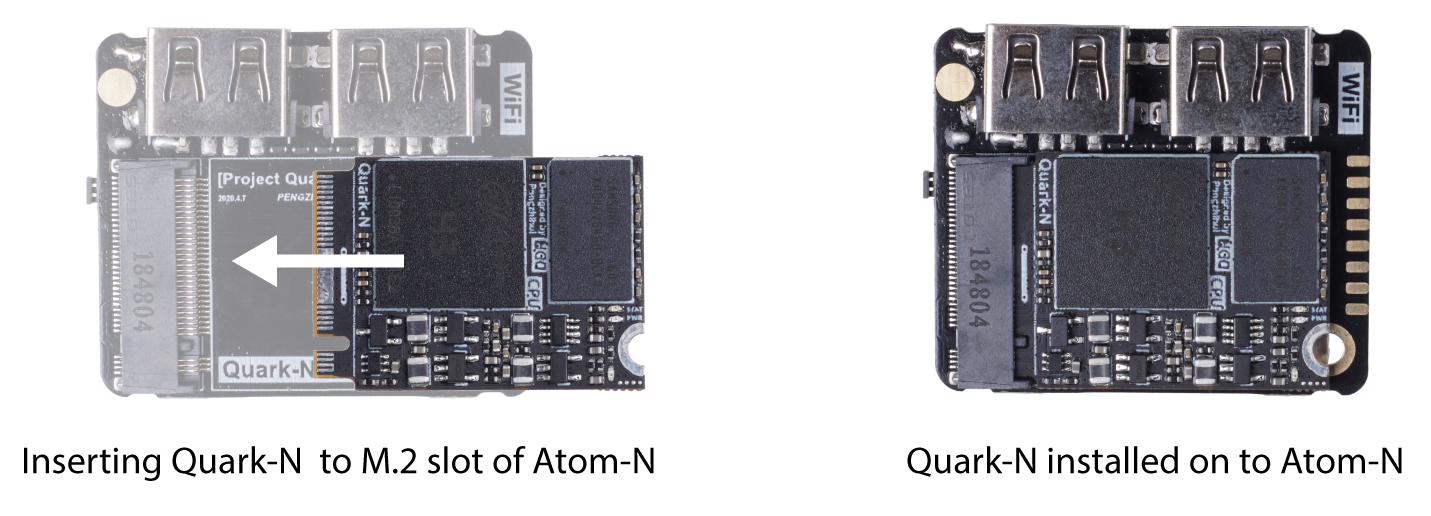
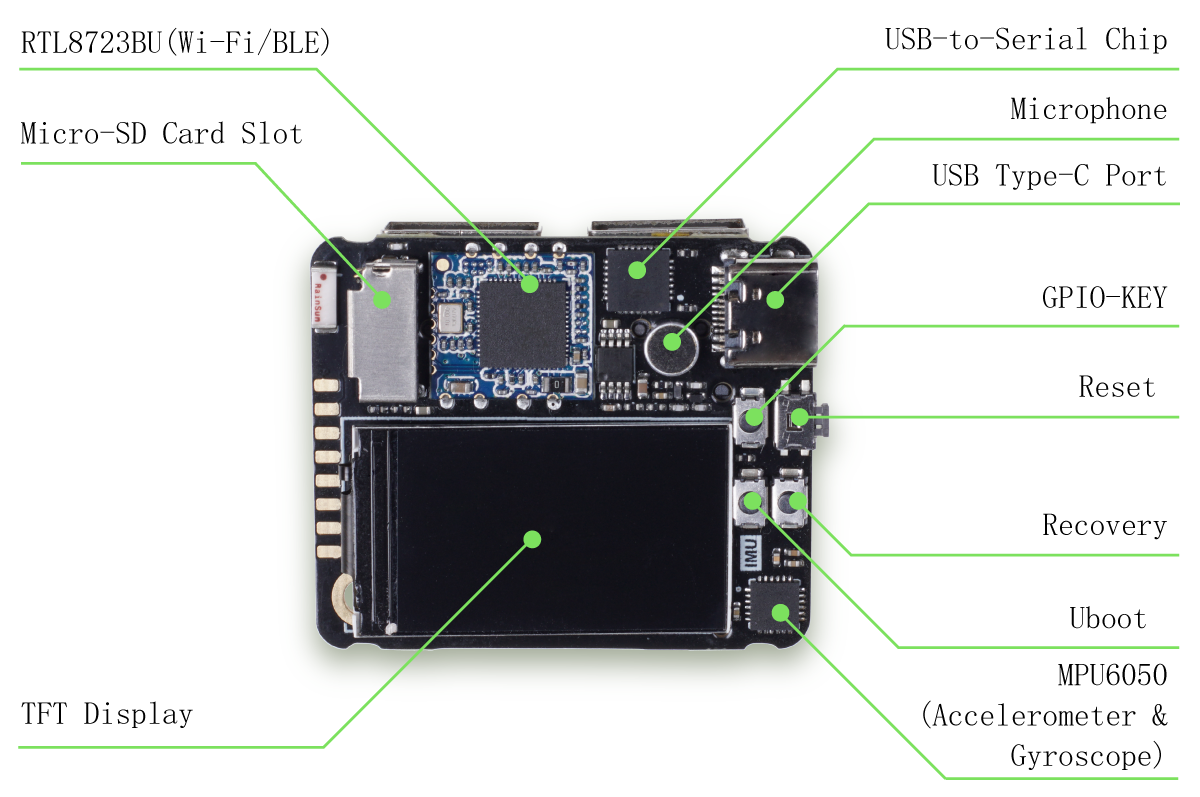
キャリアボードは Atom-N と呼ばれ、Quark-NはM.2インターフェースを通じてAtom-Nに接続されています。Atom-Nは一列のゴールドフィンガーピンを引き出してI/O拡張を実現し、SPI、I2C、UART、GPIO、その他のインターフェースを拡張して、独自の設計を完成させることを容易にします。また、マイクロフォン、MPU6050モーションセンサー(加速度計とジャイロスコープ)、オンボード4ボタン(GPIO-KEY、Uboot、Recovery、Reset)、IPSディスプレイ、Wi-Fi/Bluetooth接続を搭載しており、この製品の可能性を大幅に拡張しています。
特徴
-
超小型(31mmx22mm)で高度に統合されたクアッドコア Cortex-A7 Linux SoM(System on Module)。
-
豊富な周辺機器とインターフェースを備えたキャリアボード(40mmx35mm):マイクロフォン、ジャイロスコープ、加速度計、4 x ボタン(GPIO-KEY、Uboot、Recovery、Reset)、TFTディスプレイ。
-
高度な開発のための完全なARM-Linuxシステムを統合。
-
ワイヤレス接続(Wi-Fi + Bluetooth)。
-
M.2インターフェースにより独自のベースボードを設計可能。
-
パーソナルサーバー、インテリジェント音声アシスタント、ロボット開発など幅広い用途。
-
xrdpリモートデスクトップサーバーがプリインストールされており、HDMIケーブルを必要とせずに簡単にモニター制御が可能。
仕様
ハードウェア概要
Quantumは現在新しいバージョンにアップデートされており、旧バージョンと比較してワイヤレス性能を向上させるためにアンテナタイプが調整されています。さらに、ファンのはんだ接合部を上部に移動することでPCBレイアウトも最適化されています。UbootとRecoveryボタンも削除されました。
はじめに
ハードウェア要件
-
動作するコンピュータ
-
MicroSDカード (16GB以上を推奨)
-
キーボードとマウス
最新システムイメージのダウンロード
- 最新システムイメージ をこちらからダウンロードしてください。
最新ビルド: 2021-1-11
sha256: 8f466adf56468b05d622eba27eb7b1a11ef6d4b943272984730a73ddff7cf59a
Quantum Mini Linux開発ボードのシステムイメージは、Nano Piのイメージから変更されています。
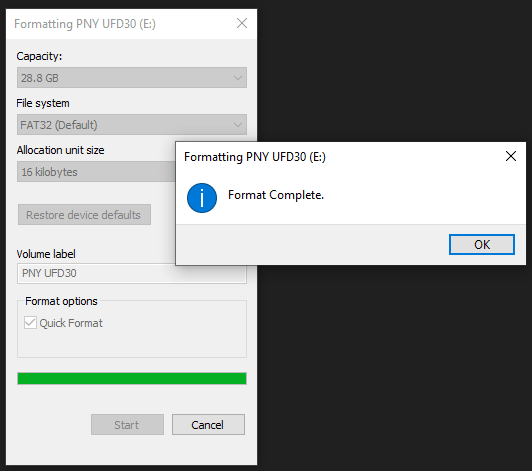
ステップ1 - 起動可能なMicroSDカードの準備
MicroSDカードをフォーマットします。Windowsユーザーの場合は、USBドライブを右クリックして「フォーマット」を選択することでUSBドライブをフォーマットできます。
注意: ファイルシステムにはFAT32を選択してください。
ステップ2 - フラッシュバーナーのダウンロード
オープンソースのフラッシュバーナーbalenaEtcherをダウンロードします。お使いのオペレーティングシステム(Windows/macOS/Linux)に応じたバージョンをダウンロードしてください。
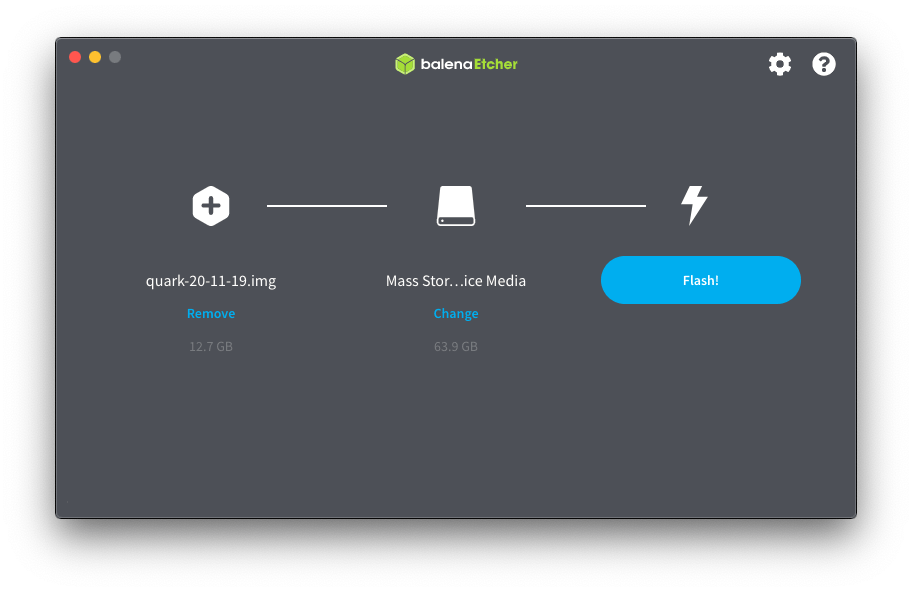
ステップ3 - OSイメージのUSBへの書き込み
ダウンロードしたシステムイメージを選択し、フォーマットしたMicroSDカードを選択してフラッシュします!これで、起動可能なMicroSDカードの準備が完了しました。
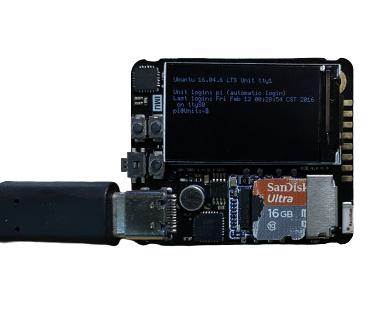
システムの起動
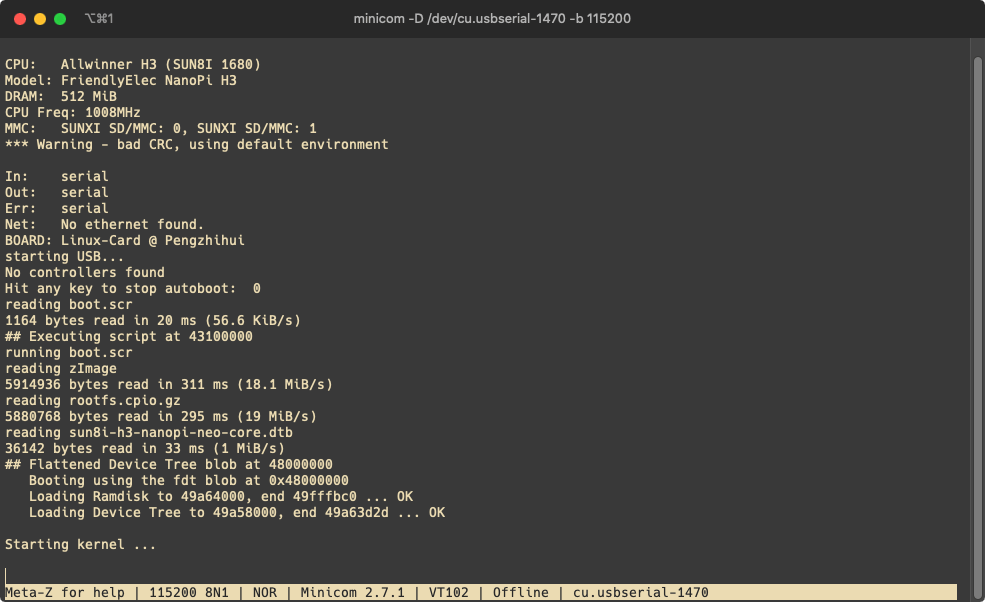
次に、MicroSDカードをAtom-NのMicroSDスロットに挿入し、電源用のUSB Type-Cを接続します(USBシリアル方向)。
これで、PCから任意のシリアルソフトウェアを使用してUSBシリアルを開くことができます!Quark-N(SoM)でシステムステータスLEDが点滅し始め、シリアルにメッセージが出力されるのが確認できるはずです。
システムのデフォルトユーザーとパスワード
- 通常ユーザー:
users: pi
password: quark
- ルートユーザー:
users: pi
password: quark
システム設定
システムイメージのユーザー、システム言語、タイムゾーン、ssh などの設定を行うには、npi-config を使用できます。
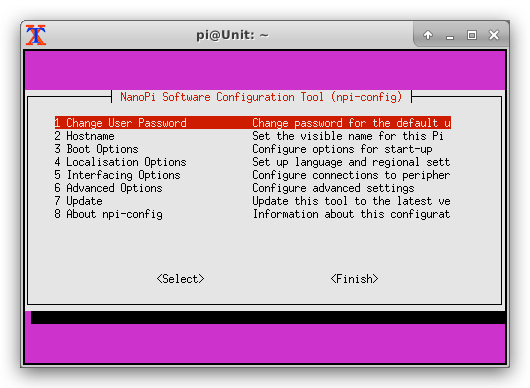
デフォルトの設定は既に構成されています。設定内容が分からない場合は、デフォルトのままにしておいてください。
Wi-Fi
スクリプト
最新のイメージには、Wi-Fi接続をより簡単に行うためのPythonスクリプトが付属しています。SSID と PASSWORD をあなたのものに置き換えてください:
cd ~/WorkSpace/System/net
sudo python connect_wifi.py SSID PASSWORD
手動接続
ここではNetworkManagerを使用してネットワークを管理します。以下の手順に従ってWi-Fiに接続してください:
- rootユーザーに切り替える:
su root
- Wi-Fiをオンにする:
nmcli r wifi on
- 近くのWi-Fiをスキャンする:
nmcli dev wifi
- 特定のWi-Fiに接続する:
nmcli dev wifi connect "SSID" password "PASSWORD" ifname wlan0
SSID と PASSWORD をあなたのWi-Fi認証情報に変更してください。一度接続すると、次回は自動的に接続されます。
NetworkManagerの詳細については、こちらをお読みください。
ソフトウェアアップデート(オプション)
ネットワークに接続したら、ソフトウェアをアップデートすることをお勧めします:
sudo apt-get update
リモートデスクトップ接続
前述のように、システムイメージにはxrdpサーバーがデフォルトで実行されているため、同じネットワーク内で**Microsoft Remote Desktop**(Windows/macOSをサポート)を使用してリモートデスクトップ接続を確立できます。
-
ifconfigを使用して開発ボードのIPアドレスを確認します。 -
同じネットワークから、開発ボードのIPアドレスを入力してログインします。これでデスクトップをリモートデスクトップで制御できます!
Bluetooth
システムイメージには内蔵のBluetoothドライバーがあり、以下の手順に従ってBluetoothを開始できます:
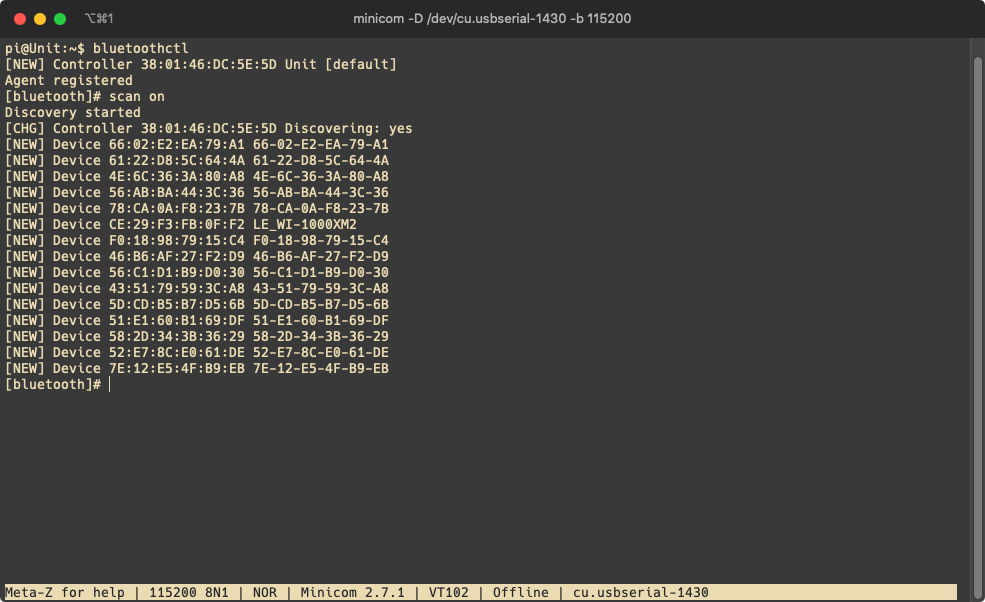
bluetoothctl
bluetoothctl インターフェース内で、scan on を実行して近くのすべてのBluetoothデバイスをリストアップします:
scan on
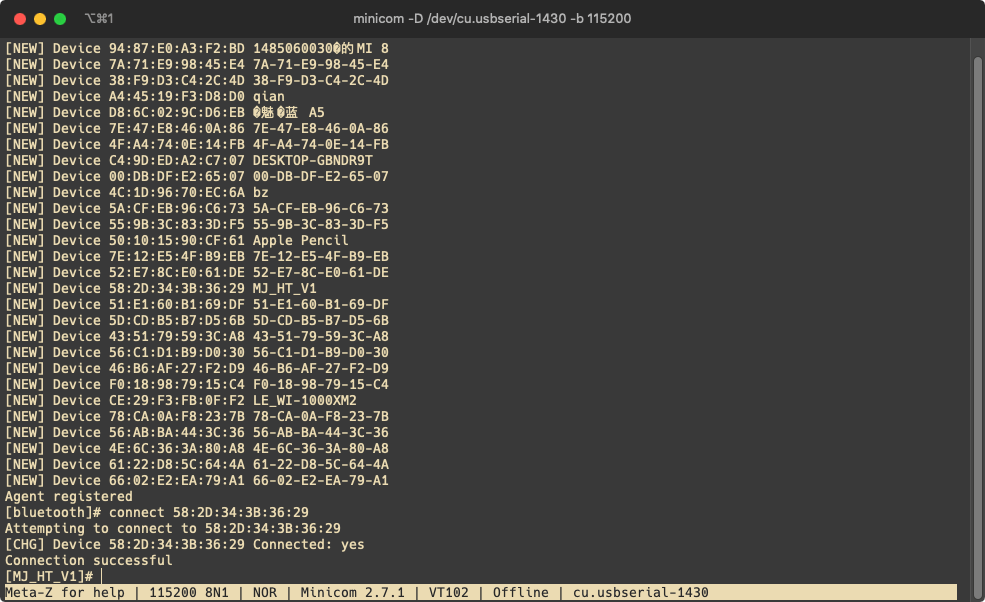
デバイスのMACアドレスをコピーし、以下のコマンドでデバイスに接続します:
pair A4:xx:xx:xx:xx:30
trust A4:xx:xx:xx:xx:30
connect A4:xx:xx:xx:xx:30
これで開発ボードがBluetoothデバイスに接続されました。ターミナルにquitと入力してください。開発ボードで音楽を再生すると、Bluetoothスピーカーデバイスから音楽が聞こえます!
LCD
LCDスクリーンのドライバーはSPIを使用してCPUと通信し、そのドライバーはシステムイメージに組み込まれているため、起動時にシステムのメッセージログを見ることができます:
-
USBキーボードとマウスを開発ボードに接続すると、これが最小構成のPCになります!
-
PythonからLCDの使用方法を実演するシンプルなpygameの例があります。
-
プロジェクトの場所に移動してください:
cd WorkSpace/PyGame
- 例を実行する:
sudo python hello_world.py

マイクロフォン
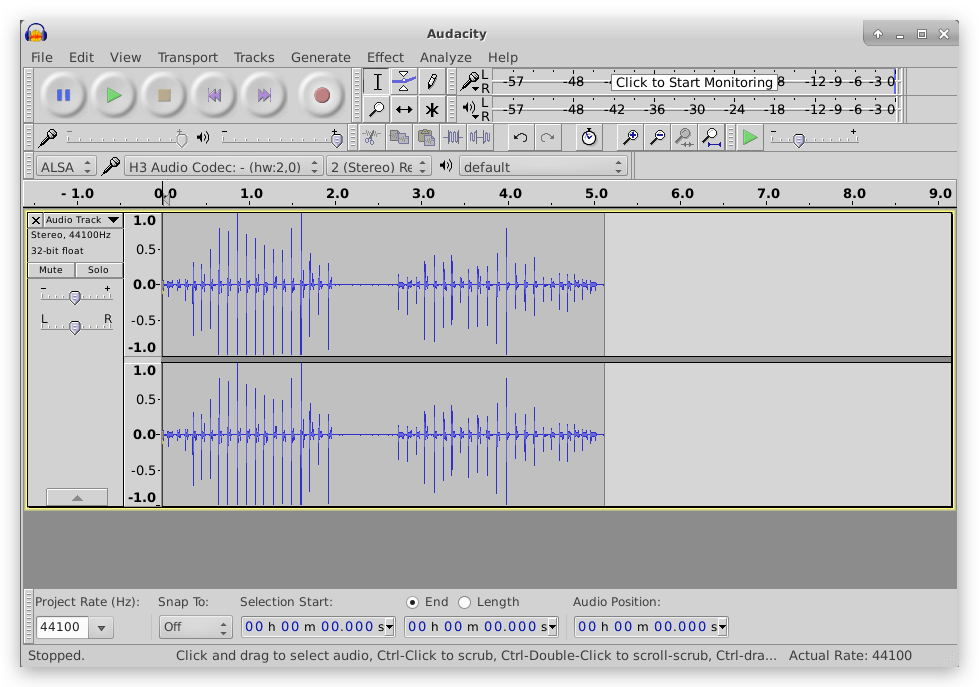
Atom-N(キャリアボード)には内蔵マイクロフォンも搭載されており、機械学習が可能です!簡単なテストには、イメージにプリインストールされている Audacity ソフトウェアを使用するのが簡単です。
-
リモートデスクトップを使用して開発ボードにログインします。
-
Audacity ソフトウェアを開きます。
-
録音を開始してマイクロフォンに話しかけると、音波が表示されるはずです!
ターミナルで arecord -l を使用してマイクロフォンについて調べることもできます。
マイクロフォンに基づくさらなる開発については、WuKong Robot と snowboy を使用した例について、パス WorkSpace/WuKong を確認してください。
GPIO
GPIO アクセスについては、Linux ベースのシステムとして非常に便利で、Python を使用して簡単に制御できます。
- プロジェクトの場所に移動します:
cd WorkSpace/GPIO
- GPIOの例を実行します:
sudo python gpio_key_led.py
ユーザーボタンを押すと、シリアル出力が表示され、Quark-N(SoM)のLEDが暗くなります!
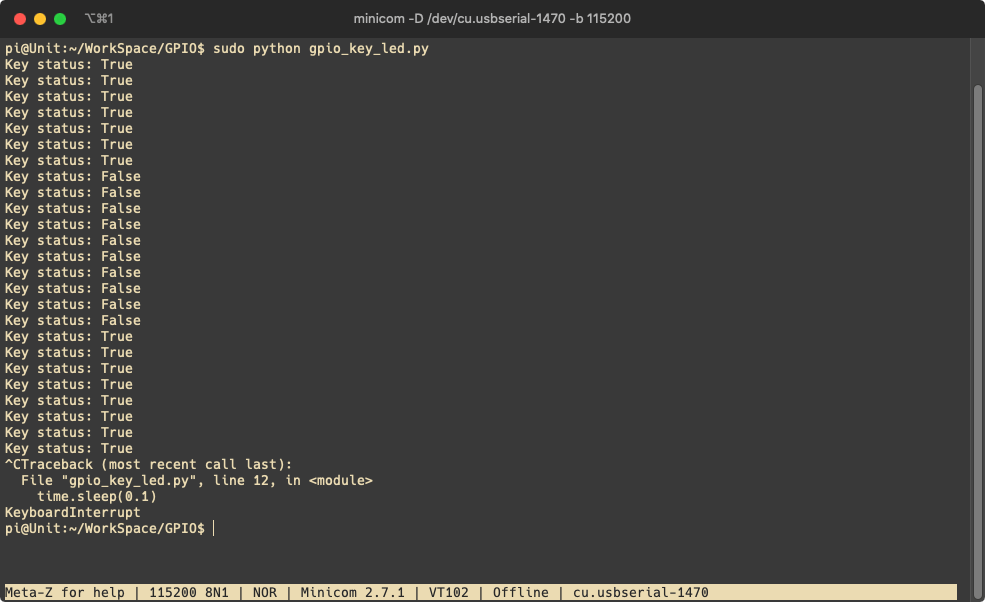
LEDはQuark-N(SoM)上にあり、Atom-N(キャリアボード)には引き出されていません。
OpenCV
システムイメージにはOpenCVも実装されており、USBカメラを使用した顔検出デモが準備されています。
-
USBカメラが必要です。USBカメラを開発ボードのUSBポートAに接続してください。
-
プロジェクトの場所に移動します:
cd WorkSpace/OpenCV
- デモを実行する:
python FaceDetectOnTft.py
開発ボードのLCD画面にビデオストリームが表示されるはずです!

その他
WorkSpaceには、TensorFlow Lite、WuKong Robot、snowboyなど、開発ボードのより多くの使用例があります。パスに移動して詳細を確認してください!
FAQ
Q1: ボードを冷却するためにファンを取り付けるにはどうすればよいですか
近い将来、この製品用のファンとファンホルダーをリリースする予定です。ただし、現在は参考用にファンホルダーDXFファイルをリリースしています。このファンホルダーには20x20x6mmのファンを取り付けることができます。
ファンホルダーは以下のように取り付けることができます:

リソース
- [ZIP] Atom Shield N AD
- [ZIP] ヒートシンクとスタンド3Dファイル
- [ZIP] ファンホルダー
技術サポートと製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。