SenseCAP Indicator - LoRa アプリケーション開発
はじめに
LoRa® は、小量のデータを長距離で送信することに最適化された長距離無線通信技術です。Chirp Spread Spectrum (CSS) と呼ばれる方法を使用して、サブGHzスペクトラムの無線信号を変調することで動作します。
Seeed Studio の SenseCAP Indicator(バージョン D1L および D1Pro)には、内蔵の LoRa トランシーバーモジュール(Semtech SX1262 LoRa® チップ)が含まれており、プロジェクトに低消費電力の無線接続を簡単に追加できます。この記事では、2つの SenseCAP Indicator ボード間で LoRa 通信を設定する方法について説明します。
概要
このデモンストレーションでは、Wio-E5 を中継として使用して、SenseCAP Indicator と XIAO ボード間で基本的な LoRa 通信を確立する方法を紹介します。SenseCAP Indicator は XIAO からセンサーデータを取得し、それが Wio-E5 を介して送信されます。送信されたペイロードは、その後 SenseCAP Indicator によって受信され、結果を解読して出力し、データを画面に表示します。
LVGL コードなし: Code · GitHub
ハードウェア
SenseCAP Indicator
ページ Dive_into_the_Hardware から、LoRa トランシーバーが SPI インターフェースを介して ESP32-S3 MCU に接続されていることがわかります。
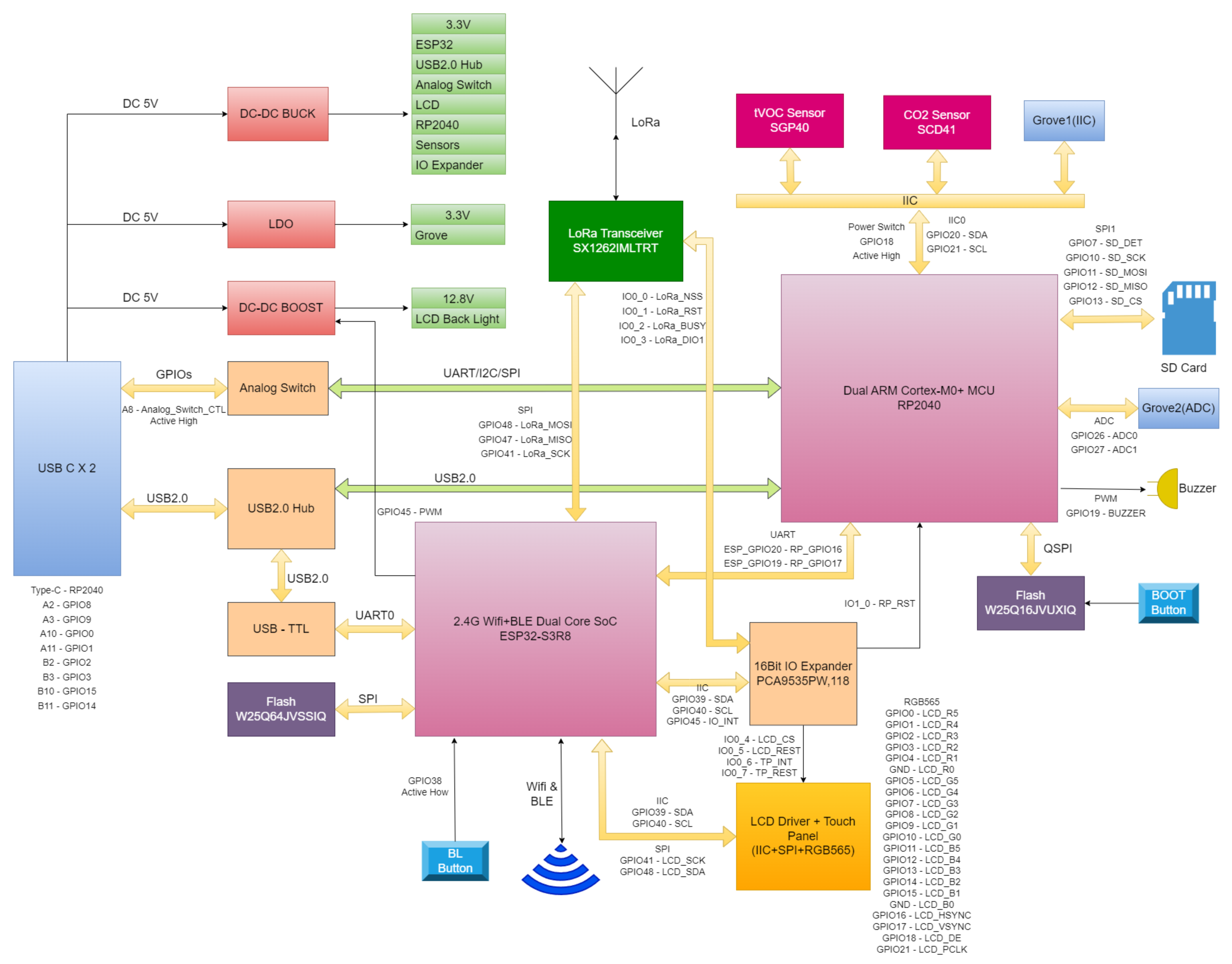
主要なコンポーネントは以下の通りです:
- Semtech SX1262 無線フロントエンド
- ESP32-S3 MCU
LoRa トランシーバーは、LoRa 信号の低レベル変調および復調をすべて処理します。ESP32-S3 から SPI インターフェースを使用してそれと通信できます。
XIAO
このデモの XIAO は、センサーデータを収集し、Wio-E5 を介して SenseCAP Indicator に送信するために必要です。XIAO は UART インターフェースを介して Wio-E5 に接続されています。
- XIAO
- Wio-E5
- SEN5x
ソフトウェア
SenseCAP_Indicator_ESP32 SDK がすでに LoRa ライブラリを提供しているため、直接使用できます。LoRa ライブラリの使用方法については、ページ LoRa® を素早く確認してください。
はじめに
このデモでは、IoT 接続用のローカル LoRa® ハブを設定する方法を示します。
前提条件
開発環境を設定するために提供された手順に従ってください。
ステップ 1: デモコードのダウンロード
このリンクからデモコードをクローンまたはダウンロードします。このコードは、LoRa アプリケーションの出発点として機能します。
ステップ 2: ペイロードエンコーダーの実装(XIAO;Arduino)
ステップ 2.1: ペイロード構造とエンコーダーの実装
- XIAO/include/Frame.h
- XIAO/include/Frame.cpp
#ifndef _FRAME_H
#define _FRAME_H
#include <Arduino.h>
#include <vector>
/** payload format
* | topic | dataLength | Data Payload | CRC |
* | 1byte | 1byte | n byte | 2byte |
* example:
* | 0x01 | 0x0E | 14 bytes | 2byte | for SEN54
* | 0x01 | 0x10 | 16 bytes | 2byte | for SEN55
*/
#pragma pack(1)
enum topics {
TOPICS_MIN = 0x00,
TOPICS_SEN5x = 0x01,
TOPIC_MAX,
};
#pragma pack(1)
typedef struct
{
enum topics topic; /*msg type*/
uint8_t dataLength;
std::vector<uint8_t> data; /*actual data of payload*/
uint16_t crc;
} Frame_t;
String packFrame(Frame_t frame);
void deleteFrame(Frame_t *frame);
uint16_t crc16_ccitt(const uint8_t *data, size_t length);
#endif
#include "Frame.h"
String packFrame(Frame_t frame) {
uint8_t *packedData = (uint8_t *)malloc(2 + frame.dataLength + 2);
if (packedData == NULL) {
return String(); // Return an empty string if memory allocation fails
}
// Pack the frame topic
packedData[0] = frame.topic;
packedData[1] = frame.dataLength;
// Pack the data payload
for (size_t i = 0; i < frame.dataLength; i++) {
packedData[2 + i] = frame.data[i];
}
// Calculate CRC (for simplicity, we assume CRC is just the sum of all bytes)
frame.crc = crc16_ccitt(packedData, 2 + frame.dataLength);
// Pack the CRC
packedData[2 + frame.dataLength] = (frame.crc & 0xFF00) >> 8;
packedData[2 + frame.dataLength + 1] = frame.crc & 0x00FF;
// String packedFrame; serialize the packed data into a string
char packedFrameBuffer[(2 + frame.dataLength + 2) * 2];
for (size_t i = 0; i < 2 + frame.dataLength + 2; i++) {
snprintf(&packedFrameBuffer[i * 2], 3, "%02X", packedData[i]); // 3 to include null terminator
}
free(packedData);
return String(packedFrameBuffer);
}
void deleteFrame(Frame_t *frame) {
free(frame);
}
uint16_t crc16_ccitt(const uint8_t *data, size_t length) {
uint16_t crc = 0xFFFF;
for (size_t i = 0; i < length; i++) {
crc ^= (uint8_t)data[i] << 8;
for (uint8_t j = 0; j < 8; j++) {
if (crc & 0x8000) {
crc = (crc << 1) ^ 0x1021;
} else {
crc <<= 1;
}
}
}
return crc & 0xFFFF;
}
ステップ 2.2: センサーデータ構造を実装し、ペイロードエンコーダーに適応させる
- XIAO/include/sensor_sen5x.h
- XIAO/src/sensor_sen5x.cpp
#ifndef PAYLOAD_SEN5X_H
#define PAYLOAD_SEN5X_H
#include "Frame.h"
#include "SensorPayload.h"
#include <SensirionI2CSen5x.h>
#define DEVICE_SEN54
#if defined(DEVICE_SEN54)
#elif defined(DEVICE_SEN55)
#else
#error "Please define a device in the compiler options."
#endif
class PayloadSEN5x : public SensorPayload<SensirionI2CSen5x> {
public:
PayloadSEN5x(SensirionI2CSen5x handler);
uint16_t init() override;
String toPayloadString() override;
private:
uint16_t massConcentrationPm1p0;
uint16_t massConcentrationPm2p5;
uint16_t massConcentrationPm4p0;
uint16_t massConcentrationPm10p0;
int16_t ambientHumidity;
int16_t ambientTemperature;
int16_t vocIndex;
#ifdef DEVICE_SEN55
// int16_t noxIndex; // Sensor SEN54 does not support NOx
#endif
SensirionI2CSen5x _sen5x;
};
#endif // PAYLOAD_SEN5X_H
#include "sensor_sen5x.h"
#include "main.h"
PayloadSEN5x::PayloadSEN5x(SensirionI2CSen5x handler)
: SensorPayload<SensirionI2CSen5x>(handler), _sen5x(handler) {
// Initialize specific data members for SEN5X here (if needed)
_sen5x.begin(Wire);
}
uint16_t PayloadSEN5x::init() {
// Implement the initialization logic for SEN5X here
uint16_t error;
char errorMessage[256];
error = _sen5x.deviceReset();
if (error) {
Serial.print("Error trying to execute deviceReset(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
}
float tempOffset = 0.0;
error = _sen5x.setTemperatureOffsetSimple(tempOffset);
if (error) {
Serial.print("Error trying to execute setTemperatureOffsetSimple(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
} else {
Serial.print("Temperature Offset set to ");
Serial.print(tempOffset);
Serial.println(" deg. Celsius (SEN54/SEN55 only)");
}
// Start Measurement
error = _sen5x.startMeasurement();
if (error) {
Serial.print("Error trying to execute startMeasurement(): ");
errorToString(error, errorMessage, 256);
Serial.println(errorMessage);
}
return 0;
}
String PayloadSEN5x::toPayloadString() {
// Add your code to convert data to payload string here
#ifdef DEVICE_SEN55
_sen5x.readMeasuredValuesAsIntegers(massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex, noxIndex);
_frame.dataLength = 16;
#else
int16_t __noxIndex;
_sen5x.readMeasuredValuesAsIntegers(massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex, __noxIndex);
_frame.dataLength = 14;
#endif
_frame.topic = TOPICS_SEN5x;
// empty the data vector
_frame.data.clear();
// make the value into hex payload string
_frame.data.push_back((uint8_t)(massConcentrationPm1p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm1p0 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm2p5 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm2p5 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm4p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm4p0 & 0xFF));
_frame.data.push_back((uint8_t)(massConcentrationPm10p0 >> 8));
_frame.data.push_back((uint8_t)(massConcentrationPm10p0 & 0xFF));
_frame.data.push_back((uint8_t)(ambientHumidity >> 8));
_frame.data.push_back((uint8_t)(ambientHumidity & 0xFF));
_frame.data.push_back((uint8_t)(ambientTemperature >> 8));
_frame.data.push_back((uint8_t)(ambientTemperature & 0xFF));
_frame.data.push_back((uint8_t)(vocIndex >> 8));
_frame.data.push_back((uint8_t)(vocIndex & 0xFF));
#ifdef DEVICE_SEN55
// _frame.data.push_back((uint8_t)(noxIndex >> 8));
// _frame.data.push_back((uint8_t)(noxIndex & 0xFF));
#endif
char data[256];
sprintf(data, "%d,%d,%d,%d,%d,%d,%d", massConcentrationPm1p0, massConcentrationPm2p5, massConcentrationPm4p0, massConcentrationPm10p0, ambientHumidity, ambientTemperature, vocIndex);
Serial.println("String: " + String(data));
for (int i = 0; i < _frame.dataLength; i++) {
Serial.print(_frame.data[i], HEX);
Serial.print(" ");
}
Serial.println();
return packFrame(_frame);
}
関数 toPayloadString はデータを文字列にシリアル化し、その文字列は Wio-E5 を介して SenseCAP Indicator に送信されます。
ステップ 2.3: コードをコンパイルして XIAO にアップロードする
#include "sensor_sen5x.h"
#include "wio_e5_at.h"
#include <Arduino.h>
#include <SensirionI2CSen5x.h>
#include <Wire.h>
SoftwareSerial serial_lora( D2, D3 );
Radio radio( serial_lora, RF_FREQUENCY, LORA_SF12, LORA_BW_125, 15, 15, 14, LORA_CRC_ON, LORA_IQ_NORMAL, LORA_PUBLIC_OFF );
SensirionI2CSen5x sen5x;
PayloadSEN5x payloadSEN5x( sen5x );
void setup() {
delay( 2000 );
wait_serial();
Serial.println( "Starting..." );
radio.begin();
Wire.begin();
payloadSEN5x.init();
Serial.println( "APP begin" );
}
void loop() {
static int count = 0;
static unsigned long task_time = 0;
static String test_string;
if ( millis() - task_time > 10000 ) {
task_time = millis();
radio.sendPayload( payloadSEN5x.toPayloadString() );
Serial.printf( "Send data %d\r\n", count++ );
}
}
ペイロードを完成させたので、次にSenseCAP Indicatorに進んでペイロードデコーダーをプログラムします。
ステップ3: ペイロードデコーダーの実装(SenseCAP Indicator;ESP-IDF)
ペイロードデコーダーは、LoRaトランシーバーから受信したバイナリペイロードを人間が読める形式に変換する関数です。ペイロードデコーダーはあなたのアプリケーション固有のものであり、あなたが実装する必要があります。このデモ用のペイロードデコーダーはデモコードで提供されています。
ステップ3.1: ペイロードデコーダーの実装
- Indicator/main/Frame/frame.h
- Indicator/main/Frame/frame.c
#ifndef __SIMPLE_FRAME_H
#define __SIMPLE_FRAME_H
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
/** payload format
* | topic | dataLength | Data Payload | CRC |
* | 1byte | 1byte | n byte | 2byte |
* example:
* | 0x01 | 0x0E | 14 bytes | 2byte | for SEN54
* | 0x01 | 0x10 | 16 bytes | 2byte | for SEN55
*/
#pragma pack(1)
enum topics {
TOPICS_MIN = 0x00,
TOPICS_SEN5x = 0x01,
TOPIC_MAX,
};
typedef struct
{
enum topics topic; /*msg type or DataId*/
uint8_t dataLength;
uint8_t *data; /*actual data of payload*/
uint16_t crc;
} Frame_t;
Frame_t *parsePayload( uint8_t *payload, uint8_t length );
void deleteFrame( Frame_t *frame );
uint16_t crc16_ccitt( const uint8_t *data, size_t length );
#endif
#include "frame.h"
#include "esp_log.h"
Frame_t *parsePayload( uint8_t *payload, uint8_t length )
{
Frame_t *frame = (Frame_t *)malloc( sizeof( Frame_t ) );
if ( frame == NULL ) {
ESP_LOGE( "parsePayload", "Failed to allocate memory for frame" );
return NULL;
}
frame->topic = (enum topics)payload[0];
frame->dataLength = payload[1];
frame->data = (uint8_t *)malloc( frame->dataLength );
if ( frame->data == NULL ) {
ESP_LOGE( "parsePayload", "Failed to allocate memory for frame data" );
free( frame ); // Clean up previously allocated memory
return NULL;
}
memcpy( frame->data, payload + 2, frame->dataLength );
frame->crc = (uint16_t)payload[length - 2] << 8 | (uint16_t)payload[length - 1];
if ( frame->crc != crc16_ccitt( payload, length - 2 ) ) {
ESP_LOGE( "parsePayload", "CRC mismatch" );
free( frame->data );
free( frame );
return NULL;
}
return frame;
}
void deleteFrame( Frame_t *frame )
{
free( frame->data );
free( frame );
}
uint16_t crc16_ccitt( const uint8_t *data, size_t length )
{
uint16_t crc = 0xFFFF;
for ( size_t i = 0; i < length; i++ ) {
crc ^= (uint8_t)data[i] << 8;
for ( uint8_t j = 0; j < 8; j++ ) {
if ( crc & 0x8000 ) {
crc = ( crc << 1 ) ^ 0x1021;
} else {
crc <<= 1;
}
}
}
return crc & 0xFFFF;
}
ステップ 3.2: センサーデータ構造の実装
- Indicator/main/Sensors/sen5x.h
- Indicator/main/Sensors/sen5x.c
#ifndef PAYLOAD_SEN5X_H
#define PAYLOAD_SEN5X_H
#include "SensorPayload.h"
#define DEVICE_SEN54
#if defined( DEVICE_SEN54 )
#elif defined( DEVICE_SEN55 )
#else
#error "Please define a device in the compiler options."
#endif
#pragma pack(push, 1)
typedef union {
struct
{
uint16_t massConcentrationPm1p0;
uint16_t massConcentrationPm2p5;
uint16_t massConcentrationPm4p0;
uint16_t massConcentrationPm10p0;
int16_t ambientHumidity;
int16_t ambientTemperature;
int16_t vocIndex;
#ifdef DEVICE_SEN55
int16_t noxIndex;
#endif
};
#ifdef DEVICE_SEN55
int16_t data[8];
#else
int16_t data[7];
#endif
} SEN5xData_t;
#pragma pack(pop)
void phraseSEN5xData( uint8_t *data_arry, SEN5xData_t *SEN5x );
void prinSEN5xData( const SEN5xData_t *SEN5x );
#endif // PAYLOAD_SEN5X_H
#include "sen5x.h"
#include "esp_log.h"
void phraseSEN5xData( uint8_t *data_arry, SEN5xData_t *SEN5x )
{
for ( uint8_t i = 0; i < sizeof( SEN5xData_t ); i++ ) {
SEN5x->data[i] = data_arry[2 * i] << 8 | data_arry[2 * i + 1];
}
}
void prinSEN5xData( const SEN5xData_t *SEN5x )
{
static const char *TAG = "sen5x_";
ESP_LOGI( TAG, "massConcentrationPm1p0: %d", SEN5x->massConcentrationPm1p0 );
ESP_LOGI( TAG, "massConcentrationPm2p5: %d", SEN5x->massConcentrationPm2p5 );
ESP_LOGI( TAG, "massConcentrationPm4p0: %d", SEN5x->massConcentrationPm4p0 );
ESP_LOGI( TAG, "massConcentrationPm10p0: %d", SEN5x->massConcentrationPm10p0 );
ESP_LOGI( TAG, "ambientHumidity: %d", SEN5x->ambientHumidity );
ESP_LOGI( TAG, "ambientTemperature: %d", SEN5x->ambientTemperature );
ESP_LOGI( TAG, "vocIndex: %d", SEN5x->vocIndex );
#ifdef DEVICE_SEN55
ESP_LOGI( TAG, "noxIndex: %d", SEN5x->noxIndex );
#endif
}
ステップ 3.3: LoRa の設定
LoRa パラメータの設定
周波数、拡散係数、帯域幅などの必要な LoRa パラメータを設定します。これらの設定は、通信を成功させるために 2 つの LoRa チャンネル間で一致している必要があります。
#define RF_FREQUENCY 868000000 // Hz
#define LORA_BANDWIDTH 0 // [0: 125 kHz, 1: 250 kHz, 2: 500 kHz, 3: Reserved]
#define LORA_SPREADING_FACTOR 12 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5, 2: 4/6, 3: 4/7, 4: 4/8]
#define LORA_PREAMBLE_LENGTH 15 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 5 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
LoRaトランシーバーレシーバーの設定
void OnRxDone( uint8_t *payload, uint16_t size, int16_t rssi, int8_t snr )
{
SEN5xData_t sen5x_data;
Frame_t *frame = parsePayload( payload, size );
if ( frame == NULL ) {
ESP_LOGE( TAG, "parsePayload error" );
return;
}
ESP_LOGI( TAG, "frame->type: %s", dataIDToString( frame->topic ) );
switch ( frame->topic ) {
case TOPICS_SEN5x:
phraseSEN5xData( frame->data, &sen5x_data );
break;
default:
break;
}
deleteFrame( frame );
}
LoRaトランシーバーの初期化
RadioEvents.RxDone = OnRxDone;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetRxConfig( MODEM_LORA, LORA_BANDWIDTH, LORA_SPREADING_FACTOR,
LORA_CODINGRATE, 0, LORA_PREAMBLE_LENGTH,
LORA_SYMBOL_TIMEOUT, LORA_FIX_LENGTH_PAYLOAD_ON,
0, true, 0, 0, LORA_IQ_INVERSION_ON, true );
Radio.SetMaxPayloadLength( MODEM_LORA, 255 );
Radio.Rx( 0 ); // Continuous Rx
ステップ 3.4: コードをコンパイルしてSenseCAP Indicatorにフラッシュする
/**
* @source: https://github.com/Seeed-Solution/indicator_lora_commu/blob/29624d10643a41ae5e1e24124b81e93b5e3cd3bb/Indicator/main/main.c
*/
#include "bsp_board.h"
#include "esp_log.h"
#include "frame.h"
#include "radio.h"
#include "sen5x.h"
static const char *TAG = "app_main";
#define VERSION "v0.0.1"
#define SENSECAP "\n\
_____ _________ ____ \n\
/ ___/___ ____ ________ / ____/ | / __ \\ \n\
\__ \\/ _ \\/ __ \\/ ___/ _ \\/ / / /| | / /_/ / \n\
___/ / __/ / / (__ ) __/ /___/ ___ |/ ____/ \n\
/____/\___/_/ /_/____/\___/\____/_/ |_/_/ \n\
--------------------------------------------------------\n\
Version: %s %s %s\n\
--------------------------------------------------------\n\
"
#define RF_FREQUENCY 868000000 // Hz
#define LORA_BANDWIDTH 0 // [0: 125 kHz, 1: 250 kHz, 2: 500 kHz, 3: Reserved]
#define LORA_SPREADING_FACTOR 12 // [SF7..SF12]
#define LORA_CODINGRATE 1 // [1: 4/5, 2: 4/6, 3: 4/7, 4: 4/8]
#define LORA_PREAMBLE_LENGTH 15 // Same for Tx and Rx
#define LORA_SYMBOL_TIMEOUT 5 // Symbols
#define LORA_FIX_LENGTH_PAYLOAD_ON false
#define LORA_IQ_INVERSION_ON false
static RadioEvents_t RadioEvents;
SEN5xData_t sen5x_data;
void OnRxDone( uint8_t *payload, uint16_t size, int16_t rssi, int8_t snr ) {
int i = 0;
ESP_LOGI( TAG, "rssi:%d dBm, snr:%d dB, len:%d, payload:", rssi, snr, size );
for ( i = 0; i < size; i++ ) {
printf( "0x%x ", payload[i] );
}
printf( "\n" );
Frame_t *frame = parsePayload( payload, size );
if ( frame == NULL ) {
ESP_LOGE( TAG, "parsePayload error" );
return;
}
ESP_LOGI( TAG, "frame->type: %s", dataIDToString( frame->topic ) );
switch ( frame->topic ) {
case TOPICS_SEN5x:
phraseSEN5xData( frame->data, &sen5x_data );
prinSEN5xData( &sen5x_data );
break;
default:
break;
}
deleteFrame( frame );
}
void app_main( void ) {
ESP_LOGI( "", SENSECAP, VERSION, __DATE__, __TIME__ );
ESP_ERROR_CHECK( bsp_board_init() );
ESP_LOGI( TAG, "APP MAIN START" );
RadioEvents.RxDone = OnRxDone;
Radio.Init( &RadioEvents );
Radio.SetChannel( RF_FREQUENCY );
Radio.SetRxConfig( MODEM_LORA, LORA_BANDWIDTH, LORA_SPREADING_FACTOR,
LORA_CODINGRATE, 0, LORA_PREAMBLE_LENGTH,
LORA_SYMBOL_TIMEOUT, LORA_FIX_LENGTH_PAYLOAD_ON,
0, true, 0, 0, LORA_IQ_INVERSION_ON, true );
Radio.SetMaxPayloadLength( MODEM_LORA, 255 );
Radio.Rx( 0 ); // Continuous Rx
while ( 1 ) {
vTaskDelay( pdMS_TO_TICKS( 10000 ) );
}
}
ステップ4: 通信をテストする
両方のSenseCAP Indicatorボードの電源を入れ、シリアルモニターを開きます。2つのボード間でメッセージが送受信されているのが確認できるはずです。おめでとうございます!SenseCAP Indicatorを使用してLoRa通信のセットアップが正常に完了しました。
String: 76,80,81,81,5389,5990,980
0 4C 0 50 0 51 0 51 15 D 17 66 3 D4
CRC: 629
<<<AT+TEST=TXLRPKT,"010E004C005000510051150D176603D40629"
>>>+TEST: TX DONE
+TEST: TXLRPKT
Send payload successfully
Send data 1
I (95490) app_main: rssi:-22 dBm, snr:5 dB, len:18, payload:
0x1 0xe 0x0 0x4c 0x0 0x50 0x0 0x51 0x0 0x51 0x15 0xd 0x17 0x66 0x3 0xd4 0x6 0x29
W (95541) parsePayload: topic: 1
W (95541) parsePayload: dataLength: 14
W (95545) parsePayload: payload[0]: 00
W (95549) parsePayload: payload[1]: 4C
W (95554) parsePayload: payload[2]: 00
W (95558) parsePayload: payload[3]: 50
W (95563) parsePayload: payload[4]: 00
W (95567) parsePayload: payload[5]: 51
W (95572) parsePayload: payload[6]: 00
W (95576) parsePayload: payload[7]: 51
W (95580) parsePayload: payload[8]: 15
W (95585) parsePayload: payload[9]: 0D
W (95589) parsePayload: payload[10]: 17
W (95594) parsePayload: payload[11]: 66
W (95598) parsePayload: payload[12]: 03
W (95603) parsePayload: payload[13]: D4
I (95607) app_main: frame->type: SEN5X
I (95612) sen5x_: massConcentrationPm1p0: 76
I (95617) sen5x_: massConcentrationPm2p5: 80
I (95622) sen5x_: massConcentrationPm4p0: 81
I (95627) sen5x_: massConcentrationPm10p0: 81
I (95632) sen5x_: ambientHumidity: 5389
I (95636) sen5x_: ambientTemperature: 5990
I (95641) sen5x_: vocIndex: 980
リソース
| 名前 | 機能 |
|---|---|
| ビープ制御 | 文字列「ON」または「OFF」を受信し、対応する機能を実行できます |
| PingPong | マスターデバイスとスレーブデバイス間でピンポン通信パターンを確立します。 |
| マルチセンサーデータアップロード | XIAOS3がデータを収集し、Wio-E5(LoRaモジュールとATコマンド付き)を利用してセンサーデータをIndicatorにアップロードします。 |
詳細については、READMEファイルを参照してください。
技術サポート
SenseCAP Indicatorでお困りですか?私たちがサポートいたします!
このチュートリアルに従う際に問題が発生したり、ご質問がございましたら、お気軽に技術サポートまでお問い合わせください。私たちは常にお手伝いする準備ができています!
ご質問はSeeed公式Discordチャンネルにアクセスするか、GitHubディスカッションで何でもお気軽にシェアしてください!