reServer JetsonによるAI NVR
はじめに
人工知能技術の進歩により、従来のビデオ監視システムはより高度な知能化に向けて進化しています。AI NVR(Network Video Recorder)は人工知能とビデオ監視技術を組み合わせ、ビデオの録画だけでなく、ビデオコンテンツのリアルタイム分析、認識、処理を可能にします。これにより、セキュリティ監視の効率性と精度が向上します。この記事では、NVIDIA Jetsonプラットフォームを使用してAI NVRを実装する方法を紹介します。
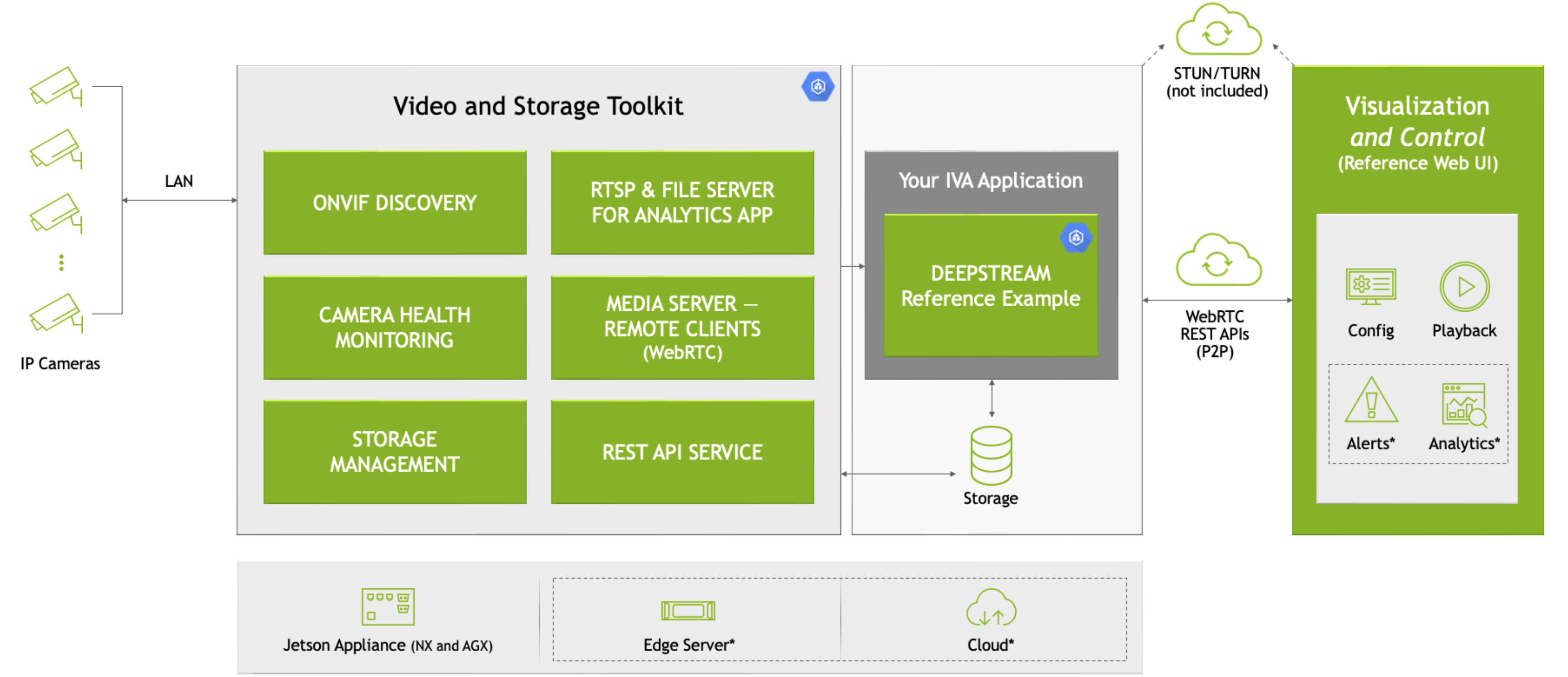
このwikiでは、Nvidia VSTとJetson Platform Serviceの他のマイクロサービスを使用して、Jetsonデバイス上にローカルAI NVRを迅速にデプロイします。 ここでは、VSTを使用してカメラを追加し、DeepStream歩行者検出モデルを使用してオブジェクトを検出し、検出結果を元のビデオストリームと共にVSTビデオウォールに表示します。
AI NVRとは?
AI NVRは、ビデオ録画と人工知能分析機能を統合したデバイスです。従来のNVRとは異なり、AI NVRはビデオ映像内の重要なイベント(侵入や物体の紛失など)を自動的に識別し、事前定義されたルールに基づいてアラームをトリガーすることもできます。このレベルの知能は、強力な計算能力と深層学習アルゴリズムに依存しています。
なぜreServer(NVIDIA Jetson)プラットフォームを選ぶのか?
NVIDIA Jetsonは高性能で低消費電力の組み込み計算プラットフォームであり、AIと深層学習アプリケーションに理想的です。JetsonプラットフォームはNVIDIA GPUを搭載しており、深層学習推論プロセスを加速し、TensorFlowやPyTorchなどの幅広いAIツールとフレームワークをサポートします。
reServerは、Nvidia Jetsonプラットフォームをベースとしたエッジコンピューティングデバイスです。コンパクトな設計、パッシブ冷却、PoE対応5x RJ45 GbE、2.5" HDD/SSD用2xドライブベイ、豊富な産業用インターフェースを特徴とし、エッジAI IoTデバイスに理想的な選択肢です。
前提条件
- Jetson Orinデバイス(jetpack 6.0 OS搭載)
- IPカメラ
このwikiでは、reServer Industrial J4012を使用して以下のタスクを実行しますが、他のJetsonデバイスでも試すことができます。
このwikiの手順に従って、最新のJetPack 6.0システムをreServerにフラッシュできます。

はじめに
ハードウェア接続
- Jetsonデバイスをネットワーク、マウス、キーボード、モニターに接続します。
- IPカメラをネットワークに接続します。
もちろん、ローカルネットワーク経由でSSHを使用してJetsonデバイスにリモートアクセスすることもできます。
ステップ1. nvidia-jetson-servicesのインストール
Jetsonデバイスのターミナルを開いて、以下を入力します:
sudo apt update
sudo apt install nvidia-jetson-services
そうすると、/opt/nvidia/jetson/services/ に多くのマイクロサービスがあることがわかります。

ステップ2. ingress設定の変更
/opt/nvidia/jetson/services/ingress/config/ ディレクトリで、ai-nvr-nginx.conf という名前の新しいファイルを作成し、以下の内容を記入します:
# specify you service discovery config here
location /emdx/ {
rewrite ^/emdx/?(.*)$ /$1 break;
proxy_set_header Host $host;
proxy_set_header X-Real-IP $remote_addr;
proxy_set_header X-Forwarded-For $proxy_add_x_forwarded_for;
access_log /var/log/nginx/access.log timed_combined;
proxy_pass http://emdx_api;
}
location /ws-emdx/ {
rewrite ^/ws-emdx/?(.*)$ /$1 break;
proxy_set_header Host $host;
proxy_pass http://emdx_websocket;
proxy_http_version 1.1;
proxy_set_header Upgrade $http_upgrade;
proxy_set_header Connection "upgrade";
}
ステップ 3. NVR データストレージの場所を変更する(オプション)
ファイル /opt/nvidia/jetson/services/vst/config/vst_storage.json を開き、必要に応じてディレクトリを変更します。
{
"data_path": "/home/seeed/VST/storage/data/",
"video_path": "/home/seeed/VST/storage/video/",
"total_video_storage_size_MB": 10000
}
ステップ4. VSTサービスを開始する
VSTサービスは他のサービスに依存しているため、すべての依存サービスを一緒に開始する必要があります。
sudo systemctl start jetson-redis
sudo systemctl start jetson-ingress
sudo systemctl start jetson-vst
マイクロサービスが開始されると、対応するDockerコンテナが作成されます。

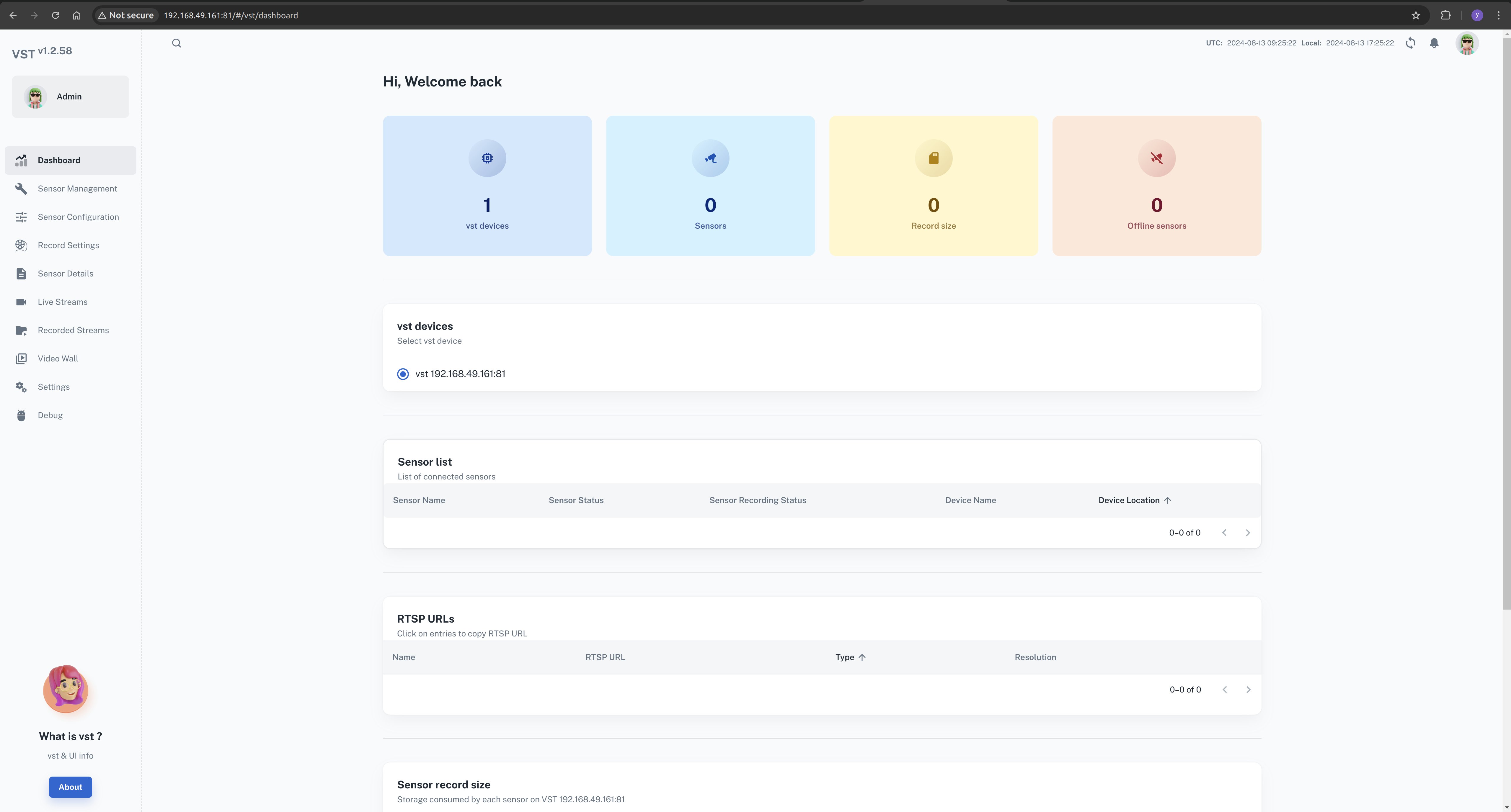
これで、ブラウザでVST Web UIを開くことができます。
ローカルネットワークで、ブラウザを開いて次のように入力してください:http://<ip-of-jetson>:81/
ステップ5. AI NVR設定ファイルをダウンロードする
ブラウザを開いてダウンロードページに移動します。
Download(右上角) --> Browser(Diect Download)
cd <path-of-download>
unzip files.zip
cd files
tar -xvf ai_nvr-1.1.0.tar.gz
cd ai_nvr
ステップ6. DeepStream 設定ファイルの修正
モデルの推論結果をリアルタイムで確認できるようにするため、DeepStreamの入力方法を修正する必要があります。ここでは、RTSP出力として設定できます。
この設定ファイルを見つけて、その内容を更新してください。
<path-of-ai_nvr>/config/deepstream/pn26/service-maker/ds-config-0_nx16.yaml
ds-config-0_nx16.yaml
################################################################################
# SPDX-FileCopyrightText: Copyright (c) 2024 NVIDIA CORPORATION & AFFILIATES. All rights reserved.
# SPDX-License-Identifier: MIT
#
# Permission is hereby granted, free of charge, to any person obtaining a
# copy of this software and associated documentation files (the "Software"),
# to deal in the Software without restriction, including without limitation
# the rights to use, copy, modify, merge, publish, distribute, sublicense,
# and/or sell copies of the Software, and to permit persons to whom the
# Software is furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
# THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
# FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER
# DEALINGS IN THE SOFTWARE.
################################################################################
deepstream:
nodes:
- type: nvinfer
# name of the primary inference must be 'pgie' for test app to route streams here
name: pgie
properties:
config-file-path: "/ds-config-files/pn26/config_infer_primary_RN34_PN26_960x544_dla0_orin_unprune_nx.txt"
model-engine-file: "/pn26-files/dla0_pn26_jp6_halfmem_bs4.engine"
unique-id: 1
# be sure to rename model-engine-file whenever batch-size is changed
batch-size: 4
- type: nvtracker
name: tracker
properties:
ll-config-file: "/ds-config-files/pn26/config_tracker_NvDCF_PNv2.6_Interval_1_PVA.yml;/ds-config-files/pn26/config_tracker_NvDCF_PNv2.6_Interval_1_PVA.yml"
ll-lib-file: "/opt/nvidia/deepstream/deepstream/lib/libnvds_nvmultiobjecttracker.so"
sub-batches: "2:2"
tracker-width: 960
tracker-height: 544
- type: nvmsgconv
name: msgconv
properties:
payload-type: 1
- type: nvmsgbroker
name: msgbroker
properties:
config: "/ds-config-files/pn26/cfg_redis.txt"
proto-lib: "/opt/nvidia/deepstream/deepstream/lib/libnvds_redis_proto.so"
conn-str: "localhost;6379;test"
topic: "test"
sync: false
async: false
- type: queue
name: checkpoint
- type: nvmultistreamtiler
name: tiler
properties:
width: 1280
height: 720
- type: nvdsosd
name: osd
- type: nvvideoconvert
name: converter
- type: tee
name: tee
- type: queue
name: queue_tracker
- type: queue
name: queue_tee
- type: queue
name: queue_tiler
- type: queue
name: queue_msgconv
- type: queue
name: queue_converter
- type: queue
name: queue_osd
- type: queue
name: queue_sink
- type: queue
name: queue_msgbroker
- type: nvvideoconvert
name: converter1
- type: nvrtspoutsinkbin
name: sink
properties:
rtsp-port: 8555
sync: false
- type: sample_video_probe.sample_video_probe
name: osd_counter
properties:
font-size: 15
edges:
pgie: [queue_tracker, osd_counter]
queue_tracker: tracker
tracker: queue_tee
queue_tee: tee
tee: [queue_tiler, queue_msgconv]
queue_tiler: tiler
tiler: queue_converter
queue_converter: converter
converter: queue_osd
queue_osd: osd
osd: queue_sink
queue_sink: converter1
converter1: sink
queue_msgconv: msgconv
msgconv: queue_msgbroker
queue_msgbroker: msgbroker
お使いのJetsonデバイスのモデルにご注意ください。この場合、Orin Nx 16GBモジュールが使用されています。異なるモデルを使用している場合は、対応する設定ファイルを見つけて必要な変更を行ってください。
composeファイルのSDRの下にWDM_WL_NAME_IGNORE_REGEX環境変数を追加します。 ここでは、私のJetsonデバイスはOrin Nx 16GBを搭載したreServer J4012なので、このcomposeファイルを編集する必要があります:
<path-of-ai_nvr>/compose_nx16.yaml
...
WDM_CONSUMER_GRP_ID: sdr-deepstream-cg
WDM_CLUSTER_CONTAINER_NAMES: '["deepstream", "vst"]'
WDM_WL_NAME_IGNORE_REGEX: ".*deepstream.*"
...
ステップ7. AI NVRアプリケーションを開始する
Jetsonターミナルで、適切なコマンドを入力してAI NVRアプリケーションを開始します。
cd <path-of-download>/files/ai_nvr
# Orin AGX:
# sudo docker compose -f compose_agx.yaml up -d --force-recreate
# Orin NX16:
sudo docker compose -f compose_nx16.yaml up -d --force-recreate
# Orin NX8:
# sudo docker compose -f compose_nx8.yaml up -d --force-recreate
# Orin Nano:
# sudo docker compose -f compose_nano.yaml up -d --force-recreate
起動プロセス中に、アプリケーションはDeepStreamなどの追加のDockerコンテナを作成します。

ステップ8. Web UIを通じてローカルAI NVRを設定する
この時点で、JetsonデバイスにAI NVRアプリケーションを正常にインストールし、起動しました。 次のステップは、Web UIを通じてカメラを設定することです。
ローカルネットワークで、ブラウザを開いて次のように入力します:http://<ip-of-jetson>:30080/vst/
IPカメラとDeepstream出力ビデオストリームを手動で設定します。
Sensor Management --> Add device manually --> Submit
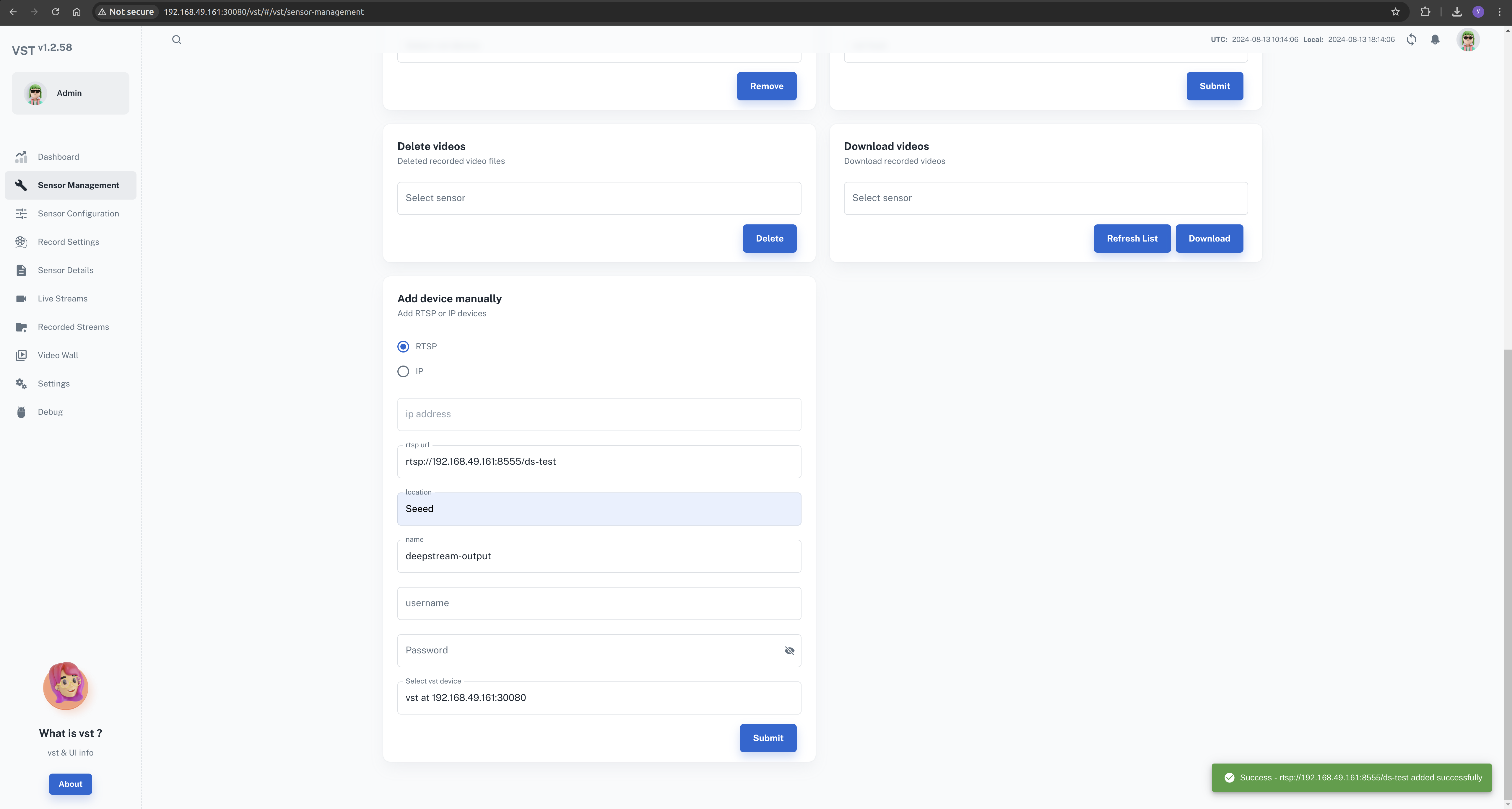
ここでは、有効なカメラアドレスまたはRTSPストリームパスを入力する必要があります。
DeepStream出力ストリームはrtsp://192.168.49.161:8555/ds-testです。
これはDeepStream設定ファイルに依存しており、必要に応じて変更できます。
deepstream出力ストリームを設定する際、カメラ名にdeepstreamフィールドを追加する必要があります
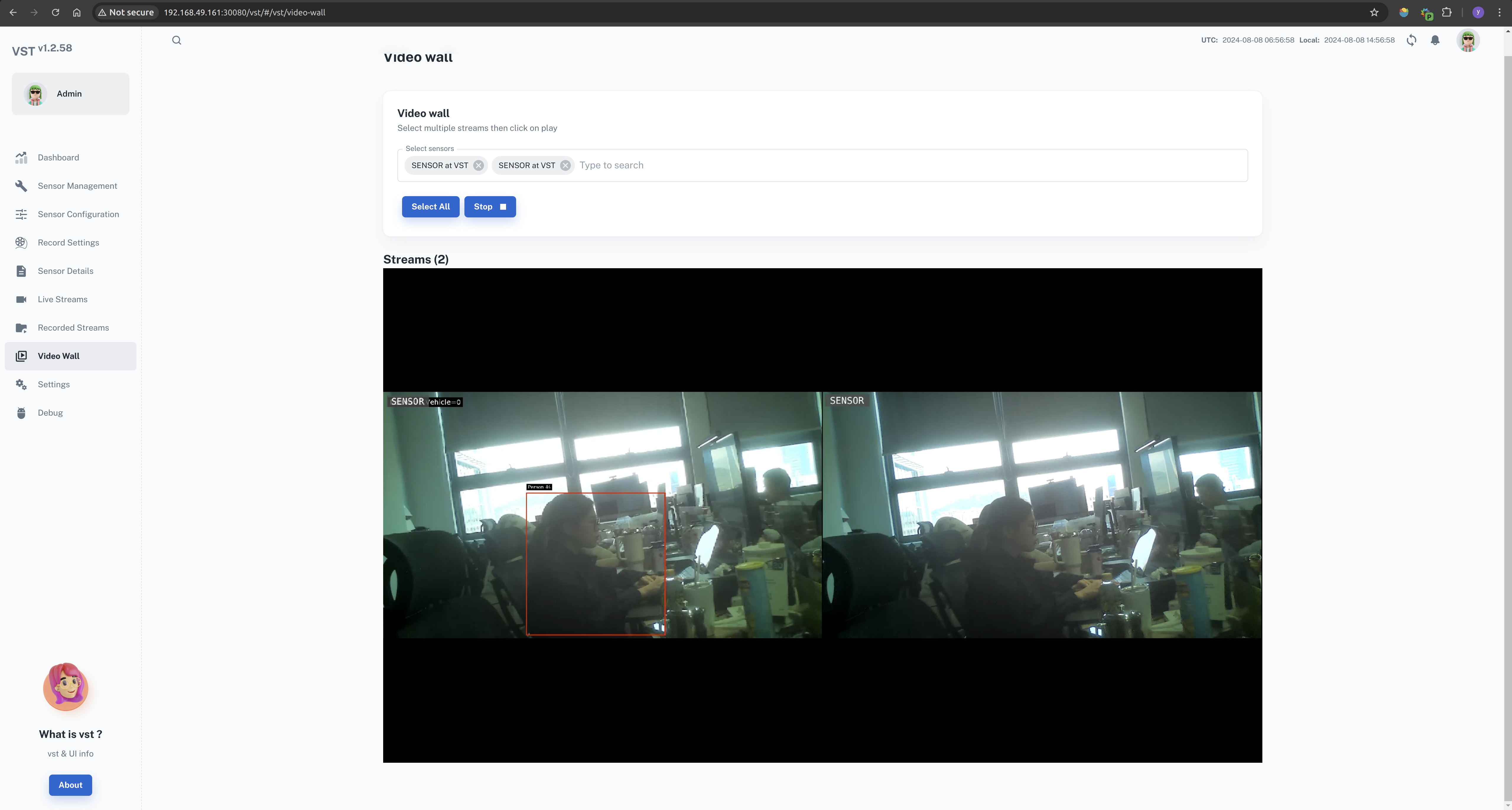
設定が正常に完了すると、ビデオウォールですべてのフィードを表示できます。
Video Wall --> Select All --> Start
ai-nvrアプリケーションを終了する
Jetsonターミナルで、適切なコマンドを入力してAI NVRアプリケーションを終了します。
cd <path-of-download>/files/ai_nvr
# Orin AGX:
# sudo docker compose -f compose_agx.yaml down --remove-orphans
# Orin NX16:
sudo docker compose -f compose_nx16.yaml down --remove-orphans
# Orin NX8:
# sudo docker compose -f compose_nx8.yaml down --remove-orphans
# Orin Nano:
# sudo docker compose -f compose_nano.yaml down --remove-orphans
サービスは以下のコマンドを使用して停止できます:
sudo systemctl stop <service-name>
例えば:
sudo systemctl stop jetson-redis
sudo systemctl stop jetson-ingress
sudo systemctl stop jetson-vst
References
- https://developer.nvidia.com/embedded/jetpack/jetson-platform-services-get-started
- https://docs.nvidia.com/jetson/jps/moj-overview.html
技術サポートと製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!お客様の製品体験を可能な限りスムーズにするため、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルをご用意しています。