Jetson 上のフリートダンスコンソールで複数の Reachy Mini ロボットを制御する
はじめに
この Wiki では、Reachy Mini と Jetson デバイスを使ってマルチロボットのダンスデモを構築する方法を説明します。
このプロジェクトでは、各 Jetson が Docker 内でローカルの Reachy Mini ダンスサービスを実行し、Web UI と REST API の両方を公開します。別のノート PC 上で動作するフリートコントロールダッシュボードは、同じ LAN 上の複数の Jetson の IP を検出し、接続されているすべての Reachy Mini ロボットに同じダンスコマンドを同時にブロードキャストできます。
最終的な結果として、次のことができるデモになります:
- Jetson デバイス 1 台につき Reachy Mini を 1 台動かす
- ノート PC 上で中央のブラウザダッシュボードを開く
- 複数の Jetson の IP アドレスを動的に追加する
- すべてのロボットのダンスを一括で開始・停止する
- フリート全体の BPM、ダンススタイル、エネルギーを変更する
- すべてのロボットに対して一度にアクセントおよびセンターアクションをトリガーする
このプロジェクトは 2 つのレイヤーで構成されています:
reachy_bpm_dancer: 各 Jetson 上で動作する単一ロボットサービスreachy_fleet_control: ノート PC 上で動作する中央フリートダッシュボード
目次
- ハードウェアの準備
- システムアーキテクチャ
- 各 Jetson を Reachy Mini 用に準備する
- Docker 化された Reachy Mini ダンスサービスをデプロイする
- ノート PC 上でフリートコントロールダッシュボードを実行する
- 複数の Reachy Mini ロボットを制御する
- REST API リファレンス
- トラブルシューティング
- 参考資料
ハードウェアの準備
デバイス一覧
- 同一 LAN 上の Windows ノート PC または制御用 PC 1 台
- Jetson デバイス 1 台以上
- 各 Jetson に USB 接続された Reachy Mini 1 台
- LAN 接続用のネットワークルーターまたはスイッチ 1 台
このワークフローは、ターゲットシステムが Docker を実行でき、USB シリアル経由で Reachy Mini にアクセスできる限り、Seeed reComputer Jetson シリーズデバイスを含む Jetson ベースのエッジデバイスに適しています。

配線と接続
各ロボットノードについて:
- Reachy Mini を USB で Jetson に接続する
- Jetson の電源を入れる
- ノート PC とすべての Jetson デバイスが同じ LAN 上にあることを確認する
電源投入チェックリスト
各 Jetson 上で、Reachy Mini のシリアルデバイスが見えていることを確認します:
ls /dev/ttyACM*
/dev/ttyACM0 のようなデバイスが見えていれば、ハードウェアリンクは準備完了です。
システムアーキテクチャ
このデモはハブ&スポーク型の設計を採用しています:
- 各 Jetson が 1 つの Reachy Mini ダンスコンテナをホストする
- 各コンテナはポート
8042でローカルロボットの Web UI と REST API を公開する - ノート PC はポート
8060でフリートコントロール Web アプリケーションを実行する - ノート PC はすべての Jetson API をポーリングし、同じ制御コマンドをオンラインのすべてのロボットにファンアウトする
Jetson 側サービスは、低レイテンシのシンボリックモーション制御向けに設計されています。軽量な set_target() ループを使用し、マイクやカメラ入力には依存しません。
推奨ネットワーク構成:
Laptop (Fleet Control, port 8060)
|- Jetson A -> Reachy Mini A -> http://<jetson-a-ip>:8042
|- Jetson B -> Reachy Mini B -> http://<jetson-b-ip>:8042
|- Jetson C -> Reachy Mini C -> http://<jetson-c-ip>:8042
各 Jetson を Reachy Mini 用に準備する
Reachy Mini を制御するすべての Jetson 上で、次の手順を実行します。
sudo apt update
sudo apt install -y nvidia-container curl
curl https://get.docker.com | sh && sudo systemctl --now enable docker
sudo nvidia-ctk runtime configure --runtime=docker
sudo systemctl restart docker
sudo usermod -aG docker $USER
newgrp docker
sudo apt install -y jq
sudo jq '. + {"default-runtime": "nvidia"}' /etc/docker/daemon.json | \
sudo tee /etc/docker/daemon.json.tmp && \
sudo mv /etc/docker/daemon.json.tmp /etc/docker/daemon.json
sudo systemctl daemon-reload && sudo systemctl restart docker
Docker 化された Reachy Mini ダンスサービスをデプロイする
Docker イメージをダウンロードして実行する
ここから Docker イメージをダウンロードします。
reachy-bpm-dancer_20260323_linux-arm64.tar.gz のようなパッケージ化されたイメージを受け取った場合:
docker load -i reachy-bpm-dancer_20260323_linux-arm64.tar.gz
docker run -d \
--name reachy-bpm-dancer \
--restart unless-stopped \
-p 8042:8042 \
-p 8000:8000 \
--device /dev/ttyACM0:/dev/ttyACM0 \
-e REACHY_SERIAL_PORT=/dev/ttyACM0 \
reachy-bpm-dancer:20260323-arm64
Jetson 側サービスを確認する
ローカルの単一ロボット UI を開きます:
http://<jetson-ip>:8042/
API ドキュメントを開きます:
http://<jetson-ip>:8042/docs
ターミナルからロボットのステータスを確認します:
curl http://127.0.0.1:8042/api/status
ロボットのダンスを開始します:
curl -X POST http://127.0.0.1:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":124,"style":"anthem","energy":1.15}'
ロボットを停止します:
curl -X POST http://127.0.0.1:8042/api/dance/stop
Jetson 側サービスは次のものを公開します:
- ポート
8042上の Web UI - ポート
8042上の REST API - ポート
8000上の Reachy Mini デーモン
ノート PC 上でフリートコントロールダッシュボードを実行する
フリートコントロールダッシュボードはノート PC 上で別途動作し、1 つのブラウザからすべての Jetson ノードを管理できます。
ローカルの Python 環境を準備する
ノート PC 上で:
git clone https://github.com/yuyoujiang/reachy_fleet_control
cd reachy_fleet_control
python -m venv .venv
.\.venv\Scripts\python -m pip install -e .
このデモでは Windows を使用しています。PC が別のオペレーティングシステムを実行している場合は、対応するコマンドを使用して環境をインストールしてください。
フリートコントロール Web UI を起動する
.\.venv\Scripts\python -m uvicorn reachy_fleet_control.main:app --host 0.0.0.0 --port 8060
その後、次を開きます:
http://127.0.0.1:8060/
または、LAN 上の別のデバイスからアクセスします:
http://<laptop-ip>:8060/
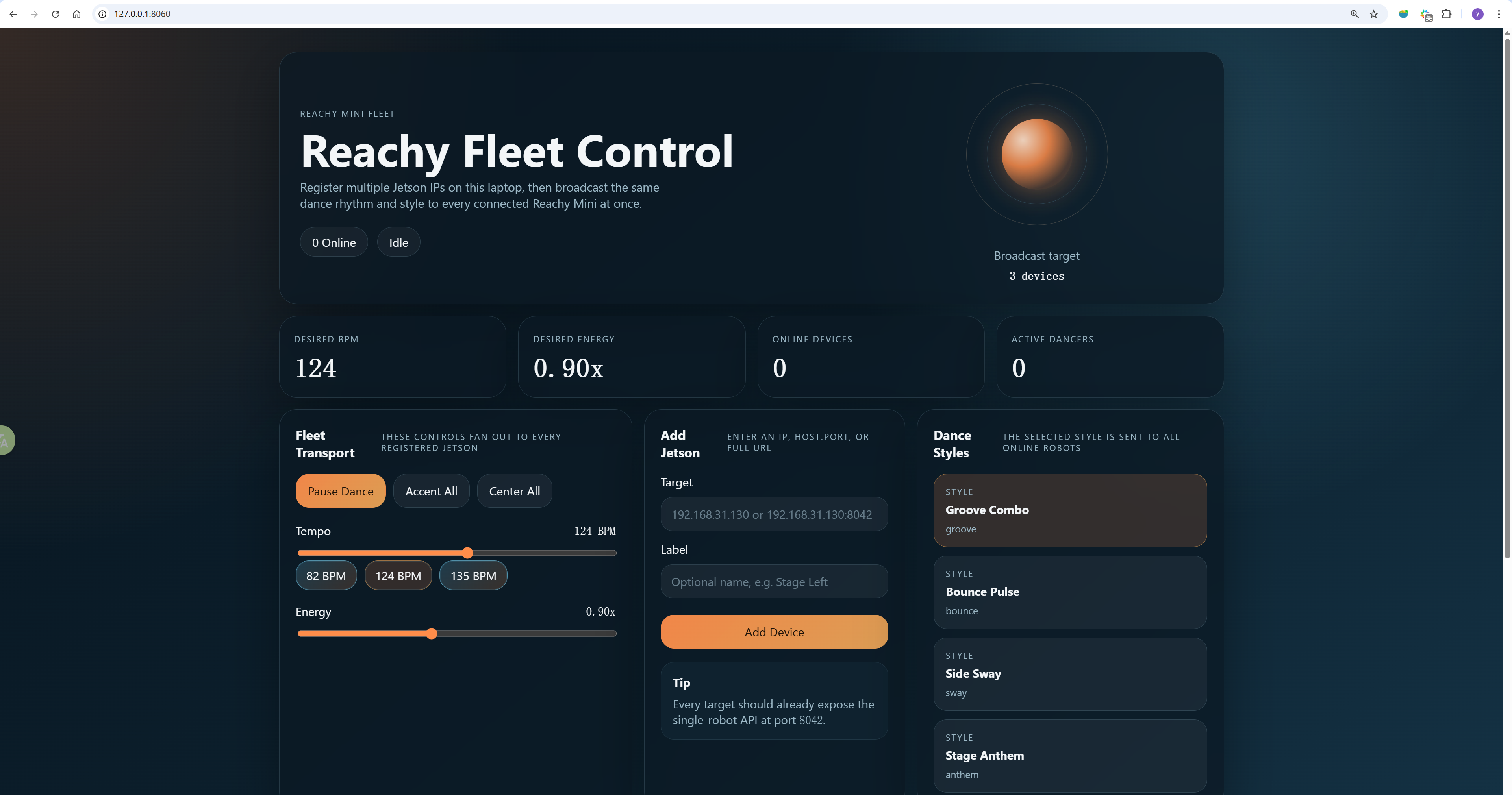
フリートダッシュボードの機能
ダッシュボードは次のことをサポートします:
- Jetson の IP、
host:port、またはフル URL の追加 - オフラインまたは未使用の Jetson ノードの削除
- ロボットごとのオンラインステータスとレイテンシの監視
- 登録済みのすべての Reachy Mini へのダンスコマンドのブロードキャスト
- デバイスリストをローカルの状態ファイルに保持
デバイスリストは Windows 上で次の場所にローカル保存されます:
C:\Users\<username>\.reachy_fleet_control\fleet_state.json
複数の Reachy Mini ロボットを制御する
両方のレイヤーが動作していれば、マルチロボットのワークフローはシンプルです。
ステップ 1. Jetson デバイスを追加する
Fleet Control ページで:
192.168.1.130のような Jetson の IP を入力する- 必要に応じてラベルを追加する
- Add Device をクリックする
LAN 上のすべての Jetson について同じ手順を繰り返します。
ステップ 2. オンラインステータスを確認する
各デバイスカードには次の情報が表示されます:
- エンドポイント
- ラベル
- オンラインまたはオフライン状態
- 現在の BPM
- ビートカウント
- レイテンシ
デバイスがオフラインの場合でも、ダッシュボードはリスト内に保持し、復帰するまでポーリングを続けます。
ステップ 3. ダンスコマンドをブロードキャストする
共有コントロールを使用して、すべてのロボットを一度に更新します:
- Start Dance
- Pause Dance
- Accent All
- Center All
- BPM プリセット:
82、124、135 - スタイル選択:
groove、bounce、sway、anthem - エネルギースライダー
ステップ 4. フリートを観察する
ブロードキャストが成功すると:
- オンラインのすべての Reachy Mini ロボットが同じ希望 BPM に切り替わる
- 選択したスタイルがすべてのロボットに適用される
- アクティブなデバイス数がダッシュボード上で更新される
- 各 Jetson はローカルでモーション生成を継続するため、小さなネットワークジッタではダンスループは停止しない
効果デモ
REST API リファレンス
このプロジェクトは 2 つの API レイヤーを公開します。
Jetson 側単一ロボット API
ベース URL:
http://<jetson-ip>:8042
利用可能なエンドポイント:
GET /apiGET /api/statusGET /api/stylesGET /api/presetsPOST /api/settingsPOST /api/dance/startPOST /api/dance/stopPOST /api/dance/accentPOST /api/dance/center
例:
curl -X POST http://<jetson-ip>:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":135,"style":"anthem","energy":1.2}'
ノート PC 側フリート API
ベース URL:
http://<laptop-ip>:8060
利用可能なエンドポイント:
GET /apiGET /api/fleet/statusPOST /api/fleet/devicesDELETE /api/fleet/devices?endpoint=<host:port>POST /api/fleet/settingsPOST /api/fleet/dance/startPOST /api/fleet/dance/stopPOST /api/fleet/dance/accentPOST /api/fleet/dance/center
Jetson デバイスを追加します:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/devices" `
-Method Post `
-ContentType "application/json" `
-Body '{"target":"192.168.1.130","label":"Stage Left"}'
すべてのロボットを起動します:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/start" `
-Method Post `
-ContentType "application/json" `
-Body '{"bpm":124,"style":"anthem","energy":1.15}'
すべてのロボットを停止します:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/stop" `
-Method Post
トラブルシューティング
Reachy Mini が Jetson に認識されない
USB シリアルノードが存在するか確認します:
ls /dev/ttyACM*
必要に応じて、Docker のデバイスマッピングと REACHY_SERIAL_PORT の値を更新してください。
ポート 8042 または 8060 がすでに使用されています
サービスを再起動する前に、古いプロセスを停止するか、別のポートを選択してください。
フリートダッシュボードでデバイスがオフラインと表示される
次の点を確認してください:
- ノート PC と Jetson が同じ LAN 上にある
- Jetson サービスが実行中である
- Jetson のファイアウォールがポート
8042をブロックしていない - ダッシュボードに入力した IP アドレスが正しい
API は応答するがロボットが動かない
Jetson 上のコンテナログを確認します:
docker compose logs -f
また、次の点も確認してください:
- Reachy Mini が Jetson に接続されている
- シリアルデバイスパスがコンテナ設定と一致している
- ロボットが他のプロセスに占有されていない
参考情報
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。弊社は、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに合わせて選べる、複数のコミュニケーションチャネルをご用意しています。