Jetson 上の YOLOv26 デュアル GMSL カメラ画像処理システム
はじめに
人工知能とエッジコンピューティング技術の急速な発展に伴い、産業用ビジョンシステムはより高いインテリジェンスとリアルタイム処理能力へと進化しています。ディープラーニングモデルを搭載したデュアルカメラ画像処理システムにより、複数視点からの同時解析、物体検出、ポーズ推定、インスタンスセグメンテーションが可能になります。これにより、産業検査、ロボティクス、自動監視アプリケーションの効率と精度が向上します。本ガイドでは、NVIDIA Jetson プラットフォーム上で YOLOv26 と TensorRT アクセラレーションを用いて、高性能なデュアル GMSL カメラ画像処理システムを構築する方法を紹介します。
この wiki では、reComputer Robotics J5011 上で TensorRT によって最適化された YOLOv26 モデルをデプロイし、リアルタイムのマルチタスクビジョン解析を実現します。このシステムは、高帯域幅かつ低レイテンシのビデオ伝送を可能にする GMSL (Gigabit Multimedia Serial Link) カメラを利用しており、過酷な環境下での産業用途に最適です。物体検出、ポーズ推定、インスタンスセグメンテーションという 3 種類の YOLOv26 モデルを同時に実行し、すべて TensorRT によってアクセラレーションすることで、Jetson Orin の強力な GPU 上で最大限のスループットを引き出します。
デュアル GMSL カメラ画像処理システムとは?
デュアル GMSL カメラ画像処理システムは、高解像度カメラ 2 台とディープラーニング推論機能を統合したエッジ AI ソリューションです。従来の単眼カメラビジョンシステムとは異なり、デュアルカメラ構成には次のような利点があります:
- ステレオビジョン:奥行き認識と 3D シーン再構成を実現
- 広い視野角:重なり合う視点でより広いエリアをカバー
- 冗長性:一方のカメラが故障しても連続稼働を確保
- 多角的解析:異なる視点から物体を捉え、認識精度を向上
このシステムは、シールドケーブルを用いた最長 15 メートルの長距離でも信頼性の高いビデオ伝送を可能にする GMSL インターフェースを活用しており、電磁干渉のある産業環境に適しています。
なぜ Jetson 上で YOLOv26 を使うのか?
Ultralytics Jetson Guide では、組み込み向けデプロイにおける YOLOv26 の利点がいくつか挙げられています:
- ARM64 上での高効率:モデルアーキテクチャは Jetson デバイスの ARM64 プロセッサ向けに最適化されており、低消費電力を維持しつつ高いスループットを実現します。
- Tensor Core アクセラレーション:TensorRT にエクスポートすると、YOLOv26 は Jetson Orin の Ampere GPU アーキテクチャに搭載された専用 Tensor Core を利用します。これにより次のことが可能になります:
- 低レイテンシ:リアルタイム産業検査にとって重要です。
- 高スループット:複数の高解像度ストリームを同時に処理可能。
- 統一フレームワーク:単一のアーキテクチャで(Detection、Segmentation、Pose)といった複数タスクをサポートし、リソースに制約のあるエッジデバイスへのデプロイを簡素化します。

主な特長
- 高解像度 GMSL キャプチャ:デュアル Sensing SG3S-ISX031C-GMSL2F カメラを 1920x1536 解像度でサポート。
- TensorRT のみの推論:純粋な TensorRT エンジンを使用することで PyTorch ランタイムのオーバーヘッドを排除し、最大スループットを実現。
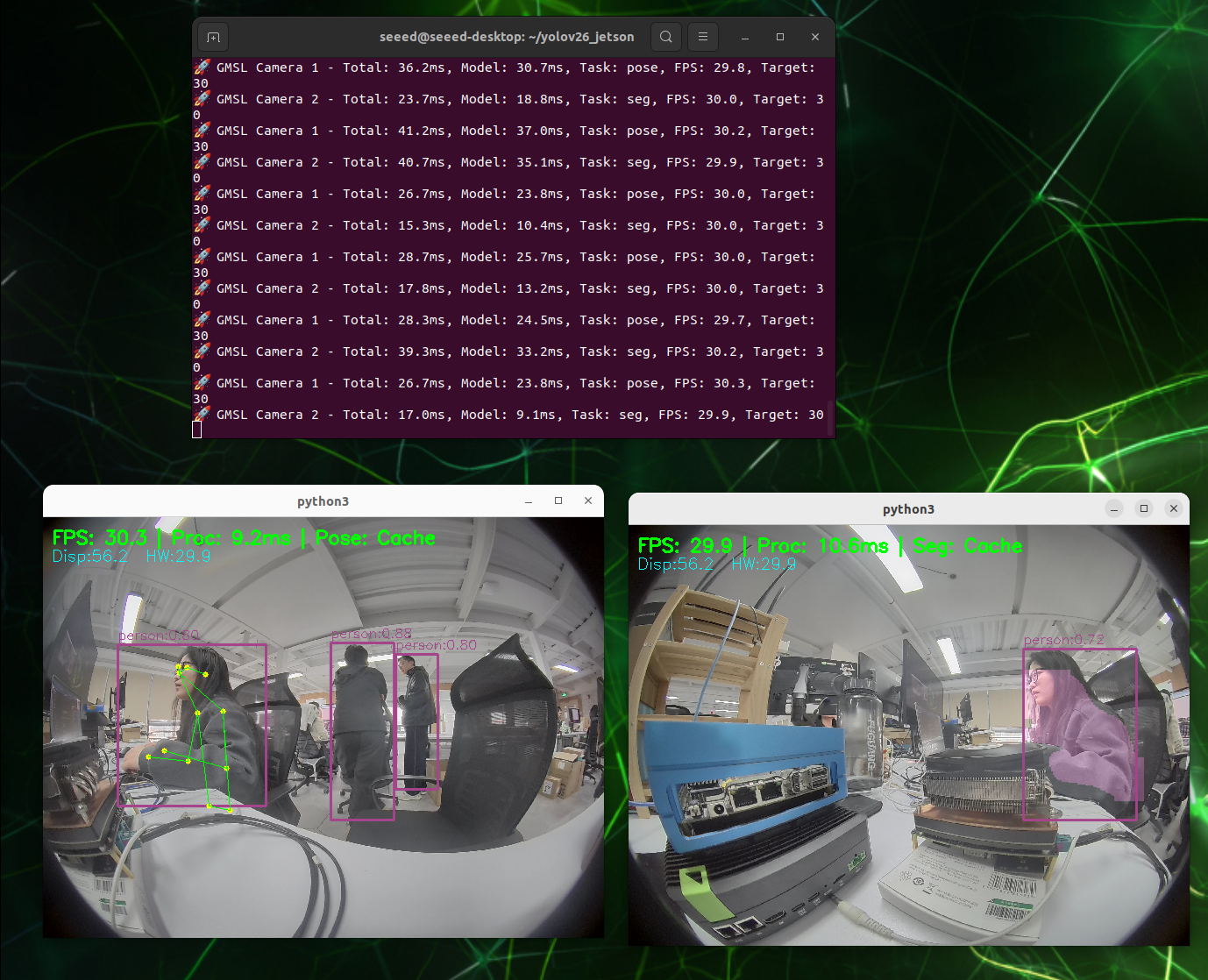
- マルチタスクビジョン解析:物体検出、ポーズ推定、インスタンスセグメンテーションを同時実行。
- 産業用途向け最適化:
- 入力:1920x1536 @ 30fps(Raw YUY2)
- レイテンシ:DMA バッファとマルチスレッドパイプラインにより最小化
YOLOv26 モデル概要
このシステムは、リアルタイムコンピュータビジョンのために YOLOv26 アーキテクチャを使用します。NVIDIA Jetson Orin のようなエッジ AI デバイスで良好に動作する Nano (n) シリーズモデルをデプロイします。
デプロイするモデル
3 種類のモデルバリアントを同時に実行します:
-
物体検出 (
yolov26n):- タスク:バウンディングボックスによる検出と分類。
- クラス:80 個の標準 COCO クラス(Person、Vehicle など)。
- 利点:主要な物体位置特定のための非常に高速な推論。
-
ポーズ推定 (
yolov26n-pose):- タスク:人体骨格キーポイント検出(17 キーポイント)。
- 利点:外部の重量級ポーズライブラリを用いずにリアルタイム行動解析が可能。
-
インスタンスセグメンテーション (
yolov26n-seg):- タスク:ピクセルレベルでの物体マスキング。
- 利点:バウンディングボックスだけでは不十分な欠陥検出に有用な、精密な物体輪郭を提供。
最適化戦略:すべてのモデルは FP16 精度の TensorRT Engine 形式 (.engine) にエクスポートされます。これにより PyTorch ランタイムのオーバーヘッドを排除し、Orin の 100+ TOPS(Tera Operations Per Second)の AI 性能を最大限に活用します。
前提条件
ハードウェア
- reComputer Robotics J5011
- 2x Sensing SG3S-ISX031C-GMSL2F Camera
- GMSL デシリアライザボード:Jetson Orin と互換性のあるもの(ドライバがインストールされていること)
- ケーブル:高品質な Fakra ケーブル
ソフトウェア
- JetPack 6.x(L4T 36.x)
- GStreamer(NVIDIA アクセラレーションプラグイン付き、
nvv4l2camerasrcまたはio-mode=dmabufを指定した標準v4l2src) - Python 3.10+
- Ultralytics YOLOv26
インストールとセットアップ
ステップ 0:カメラパラメータの確認
まず、v4l2-ctl を使用してカメラがサポートするフォーマットとフレームレートを確認します:
v4l2-ctl -d /dev/video0 --list-formats-ext
v4l2-ctl -d /dev/video1 --list-formats-ext
このコマンドにより、解像度ごとのカメラの最大フレームレートが表示されます。SG3S-ISX031C-GMSL2F カメラを例にすると、出力は次のようになります:
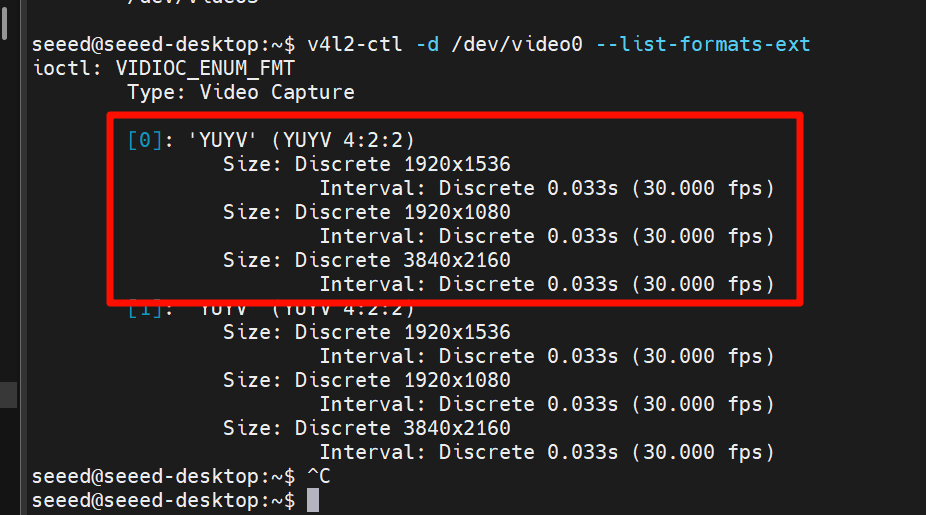
1920x1536 解像度での 30fps 制限は、AGX Orin の性能上限ではなく、カメラハードウェアの制約です。 AGX Orin は、より低い解像度や軽量なモデルであれば、はるかに高いフレームレートを処理することが可能です。別のカメラモデルを使用している場合は、対象解像度での最大フレームレートについて、そのカメラのデータシートを参照してください。
ステップ 1:リポジトリのクローン
cd /home/seeed
git clone https://github.com/bleaaach/yolov26_jetson.git
cd yolov26_jetson
詳細なインストール手順
環境をゼロからセットアップするには、次の手順に従ってください。
ステップ 1:パッケージリストの更新と pip のインストール
sudo apt update
sudo apt install python3-pip -y
pip install -U pip
システムに pip がプリインストールされていない場合は、次のコマンドでインストールします:
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
python3 get-pip.py --user
ステップ 2:Ultralytics パッケージのインストール
~/.local/bin/pip install ultralytics[export]
ステップ 3:PyTorch と Torchvision のインストール
pip でインストールした PyTorch と Torchvision は、Jetson の ARM64 アーキテクチャとは互換性がありません。Jetson 向けにビルドされたバージョンを手動でインストールする必要があります。
まず、互換性のないバージョンをアンインストールします:
~/.local/bin/pip uninstall torch torchvision -y
次に、JetPack 6.1 と互換性のあるバージョンをインストールします:
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
GitHub からのダウンロードが遅い場合は、加速プロキシを使用できます:
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
ステップ 4:cuSPARSELt のインストール
sudo apt-get install -y libcusparselt0
ステップ 5:onnxruntime-gpu のインストール
onnxruntime-gpu は一部のモデルエクスポート機能に使用されます。PyPI 上のパッケージには Jetson 向けの aarch64 バイナリが含まれていないため、手動インストールが必要です:
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.23.0-cp310-cp310-linux_aarch64.whl
または、バージョン 1.20.0 を使用します:
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.20.0-cp310-cp310-linux_aarch64.whl
ステップ 6:PATH 環境変数の設定
echo 'export PATH=$PATH:~/.local/bin' >> ~/.bashrc
source ~/.bashrc
ステップ 7:インストールの検証
python3 -c "import ultralytics; import torch; import torchvision; import onnxruntime; print('ultralytics version:', ultralytics.__version__); print('torch version:', torch.__version__); print('torchvision version:', torchvision.__version__); print('onnxruntime version:', onnxruntime.__version__)"
期待される出力:
ultralytics version: 8.4.7
torch version: 2.5.0a0+872d972e41.nv24.08
torchvision version: 0.20.0a0+afc54f7
onnxruntime version: 1.23.0
ステップ 8:YOLOv26 推論機能をテストする
from ultralytics import YOLO
import torch
print(f"CUDA available: {torch.cuda.is_available()}")
if torch.cuda.is_available():
print(f"CUDA device count: {torch.cuda.device_count()}")
print(f"CUDA device name: {torch.cuda.get_device_name(0)}")
model = YOLO('yolov26n.pt')
print(f"Model loaded successfully!")
results = model('https://ultralytics.com/images/bus.jpg')
print(f"Inference successful! Detected {len(results[0].boxes)} objects")
for i, box in enumerate(results[0].boxes):
cls_id = int(box.cls[0])
conf = float(box.conf[0])
cls_name = model.names[cls_id]
print(f" Object {i+1}: {cls_name} (confidence: {conf:.2f})")
ステップ 9:モデルファイルを準備する
ls -la /home/seeed/ultralytics_data/
mkdir -p /home/seeed/ultralytics_data
モデルファイルが存在しない場合は、先にダウンロードしてください:
cd /home/seeed/ultralytics_data
yolo export model=yolov26n.pt format=engine device=0 half=True
yolo export model=yolov26n-pose.pt format=engine device=0 half=True
yolo export model=yolov26n-seg.pt format=engine device=0 half=True
ls -la
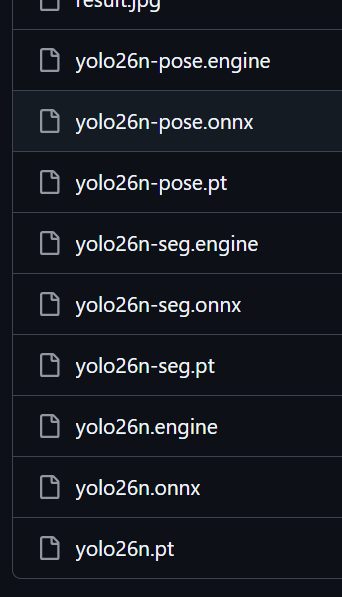
次のファイルが表示されるはずです:
yolov26n.engineyolov26n-pose.engineyolov26n-seg.engine
ステップ 10:ローカルスクリプトを実行する
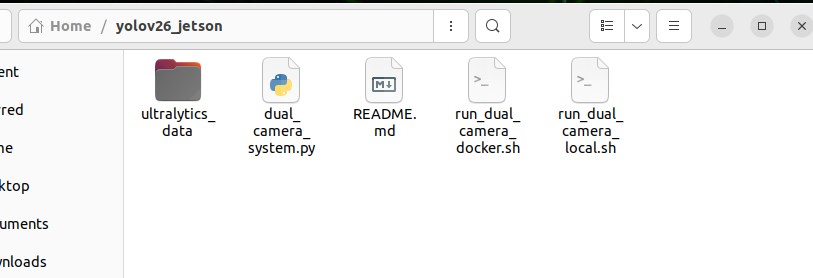
cd /home/seeed/yolov26_jetson
chmod +x run_dual_gmsl_local.sh
./run_dual_gmsl_local.sh
設定と実行
このシステムは、SG3S-ISX031C カメラ向けに事前設定された run_dual_gmsl_local.sh を使用します。
カメラ設定の詳細
| パラメータ | 値 | 備考 |
|---|---|---|
| カメラモデル | SG3S-ISX031C-GMSL2F | Sensing GMSL2 カメラ |
| キャプチャ解像度 | 1920 x 1536 | センサーのフル解像度 |
| キャプチャ FPS | 30 FPS | ネイティブフレームレート |
| 処理解像度 | 640 x 480 | 推論用にハードウェア(VIC)でダウンスケール |
| ピクセルフォーマット | YUY2 | ハードウェアで BGR に変換 |
システムの実行
cd /home/seeed/yolov26_jetson
chmod +x run_dual_gmsl_local.sh
./run_dual_gmsl_local.sh
SG3S-ISX031C-G-GMSL2F カメラは、フル解像度(1920x1536)で最大 30fps の表示フレームレートに制限されています。これはカメラハードウェアの制約であり、AGX Orin の性能上限ではありません。AGX Orin は、より低い解像度や軽量なモデルであれば、はるかに高いフレームレートを処理することが可能です。AGX Orin の一般的な推論性能については、Ultralytics Jetson Guide を参照してください。
トラブルシューティング
- FPS が低い?:
.ptではなく.engineモデルを使用していることを確認してください。スクリプトは.engineの使用を前提としています。 - ビデオが表示されない?: GMSL 接続を確認し、
/dev/video*デバイスが存在することを確認してください。v4l2-ctl --list-devicesでドライバを検証します。
リソース
技術サポートと製品ディスカッション
Seeed Studio の製品をお選びいただきありがとうございます。技術サポートおよび製品に関するディスカッションには、以下のチャネルをご利用ください: