Atom-S 入門ガイド
はじめに
Atom-S は、開発者、メイカー、教育機関向けに設計された 10 自由度(DOF)のオープンソース二足歩行ヒューマノイドロボットキットです。ロボットは 10 個の Fashionstar RA8-U25H-M バスサーボで駆動され、完全オープンソースの 3D プリント構造を採用し、Seeed Studio XIAO ESP32-S3 メインコントローラと Grove 拡張ボードを搭載しています。工場出荷時に完全な制御ファームウェアがプリインストールされています。最大の特長は、インストール不要の Web ベース視覚モーションエディタであり、ブラウザから直接、サーボのリアルタイムデバッグ、ティーチングモーションの記録、JSON のエクスポートが行え、Arduino、STM32、Raspberry Pi などのプラットフォームで容易に再現できます。付属の RUC-01 アダプタボードは 5 V / 3.3 V の安定化電源と UART インターフェースを提供し、Bluetooth および Web リモートコントロールをサポートします。箱から出してすぐに使えるため、デスクトップロボット開発やアルゴリズム検証に理想的なプラットフォームです。

1. 製品概要
- DOF レイアウト: 腕、胴体、脚をカバーする 10 自由度を備えています。
- 構造と外観: 完全 3D プリント構造で、公式に公開された STP / STL モデルファイルにより、部品交換、構造補強、外観デザインの変更が容易です。
- 関節アクチュエータ: 10 個の Fashionstar RA8-U25H-M バスサーボを採用し、バス通信により配線をシンプルかつクリーンにします。
- Web モーションエディタ: ブラウザベースのコントロールパネルで、サーボのリアルタイムデバッグとティーチングモードによるプログラミングをサポートします。完成したモーショングループは標準的な
.jsonファイルとしてエクスポートでき、Arduino、STM32、Raspberry Pi プラットフォームで容易にパースできます。 - すぐに使える構成: デフォルトのメインコントローラとして Seeed Studio XIAO ESP32-S3 を搭載し、工場出荷時にデモプログラムが書き込まれています。
- マルチモジュール拡張: Seeed Studio XIAO 拡張ボードと組み合わせることで、オンボードの Grove インターフェースから Seeed Grove センサやコントローラを接続できます。
- クロスプラットフォーム互換性: RUC-01 アダプタボードは 5 V / 3.3 V 電源出力と UART インターフェースを提供し、シリアルポート機能を持つ任意のコントローラと通信できます。
- エコシステム拡張性: Seeed Studio XIAO 拡張ボード上の Grove インターフェースを活用することで、ビジョン、環境センシングなどの Grove エコシステムの各種センサおよび制御モジュールを迅速に統合できます。
- クロスプラットフォーム互換性: 標準の RUC-01 ドライバアダプタボードは、5 V / 3.3 V の安定化出力と汎用 UART 通信インターフェースを提供し、外部の Raspberry Pi、STM32、Arduino、ESP32、PC プラットフォームとの接続を容易にします。
2. 仕様
| パラメータ | 値 |
|---|---|
| 自由度 (DOF) | 10 |
| シャーシ | 3D プリント |
| サーボ | RA8-U25H-M バスサーボ |
| サーボ電源 / インターフェースボード | RUC-01、4 つのバスサーボポート、5 V / 3.3 V コントローラ電源、およびシリアル (Grove) を提供 |
| メインコントローラ | Seeed Studio XIAO ESP32-S3 + Seeed Studio XIAO 拡張ボード |
| 通信方式 | 非同期シリアル通信 (UART) |
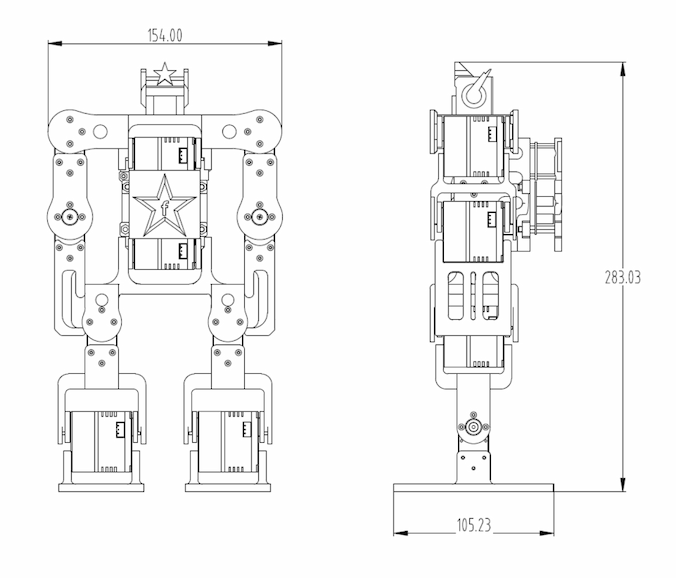
| 外形寸法 | 154 × 105 × 283 mm |
3. 同梱物
| 品目 | 数量 |
|---|---|
| 10-DOF ロボット(組立済み) | 1 |
| KM ネジ M2 × 7 mm | 10 |
| KB ネジ M2 × 7 mm | 10 |
| PM ネジ M3 × 6 mm | 2 |
| サーボケーブル 200 mm 3 ピン | 2 |
10-DOF ロボットアセンブリ内容
- RA8-U25H-M × 10
- 構造部品(キット)× 1
- RUC-01 アダプタボード × 1
- Seeed XIAO ESP32-S3 × 1
- Seeed XIAO 拡張ボード × 1
4. 外形寸法
5. ハードウェアアーキテクチャ
駆動 & 電源(RUC-01 インターフェースボード)
ロボット全体の電源および通信ハブとして機能し、バス管理と電源分配を担当します。
- サーボバス: オンボードに 4 つのバスサーボポートを備え、デイジーチェーン拡張をサポートし、信号と電源の両方を供給します。
- PC 設定インターフェース: USB Type-C により、PC ホストへ直接接続して設定が可能です。
- システム電源: 電圧変換を行い、メインコントローラボードへ安定した電源を供給します。
- 通信インターフェース: 上位メインコントローラからのコマンドを受信する標準 UART シリアルポート。
ロジックコントローラ & 拡張(MCU + Grove 拡張ボード)
ロボットの「頭脳」として、制御アルゴリズムの実行とセンサデータ処理を担当します。
- コア MCU: 小型ながら高性能な Seeed Studio XIAO シリーズ開発ボード。
- エコシステム拡張: Grove 拡張ボードにより、多数の I/O インターフェースを引き出します。
- 主な機能: ロボットの運動学プログラムを実行し、Grove インターフェース経由でセンサ(超音波、ビジョン、音声など)を接続してインタラクティブな機能を実現します。
データフロー
デバッグ / 編集モード
PC --(USB)--> RUC-01 --(Bus)--> Servos
説明: サーボ角度の調整とモーショングループの保存は、XIAO メインコントローラを経由せず、PC ソフトウェアから直接行います。
自律動作モード
Sensor / Remote --(Signal)--> XIAO --(UART Command)--> RUC-01 --(Bus)--> Servos
説明: XIAO がセンサフィードバックまたは事前に保存されたコードに基づいてロボットを自律制御します。
汎用通信インターフェースリファレンス(クロスプラットフォーム開発の必読事項)
このキットではデフォルトのメインコントローラとして XIAO ESP32S3 を使用していますが、RUC-01 インターフェースボードは任意の外部コントローラに対して開かれています。基本的な通信には、メインコントローラと RUC-01 間で 4 本の配線だけが必要です。
- 5 V / 3.3 V: RUC-01 はメインコントローラへ安定した電源を逆供給できます。
- GND: 共通グラウンド。
- RX / TX: 制御コマンドの送受信およびサーボフィードバックの読み取りを行う標準的な非同期シリアル通信 (UART)。
| No. | インターフェース説明 | No. | インターフェース説明 |
|---|---|---|---|
| ① | メイン電源スイッチ | ⑤ | アダプタボード通信用 UART / Grove インターフェース(メインコントローラ ⑧ に接続) |
| ② | 電源入力ポート | ⑥ | メインコントローラ ESP32S3 Type-C データポート(ファームウェア書き込み) |
| ③ | サーボポート × 4 | ⑦ | Seeed XIAO ESP32S3 メインコントローラボード |
| ④ | Type-C データポート(サーボデバッグ用、PC に接続) | ⑧ | メインコントローラ通信用 UART / Grove インターフェース(RUC-01 インターフェースボード ⑤ に接続) |
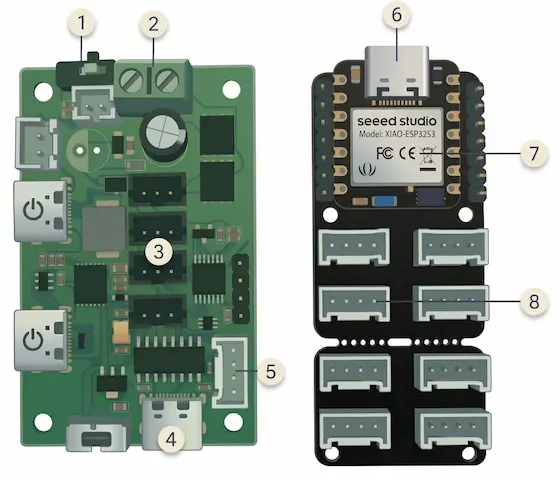
RUC-01 インターフェースボード上の Type-C ポート ④ 付近のトグルスイッチおよび図の左側に示されている 2 つの Type-C ポートは、他用途向けに予約されており、本プロジェクトでは使用しません。誤って操作しないようご注意ください。
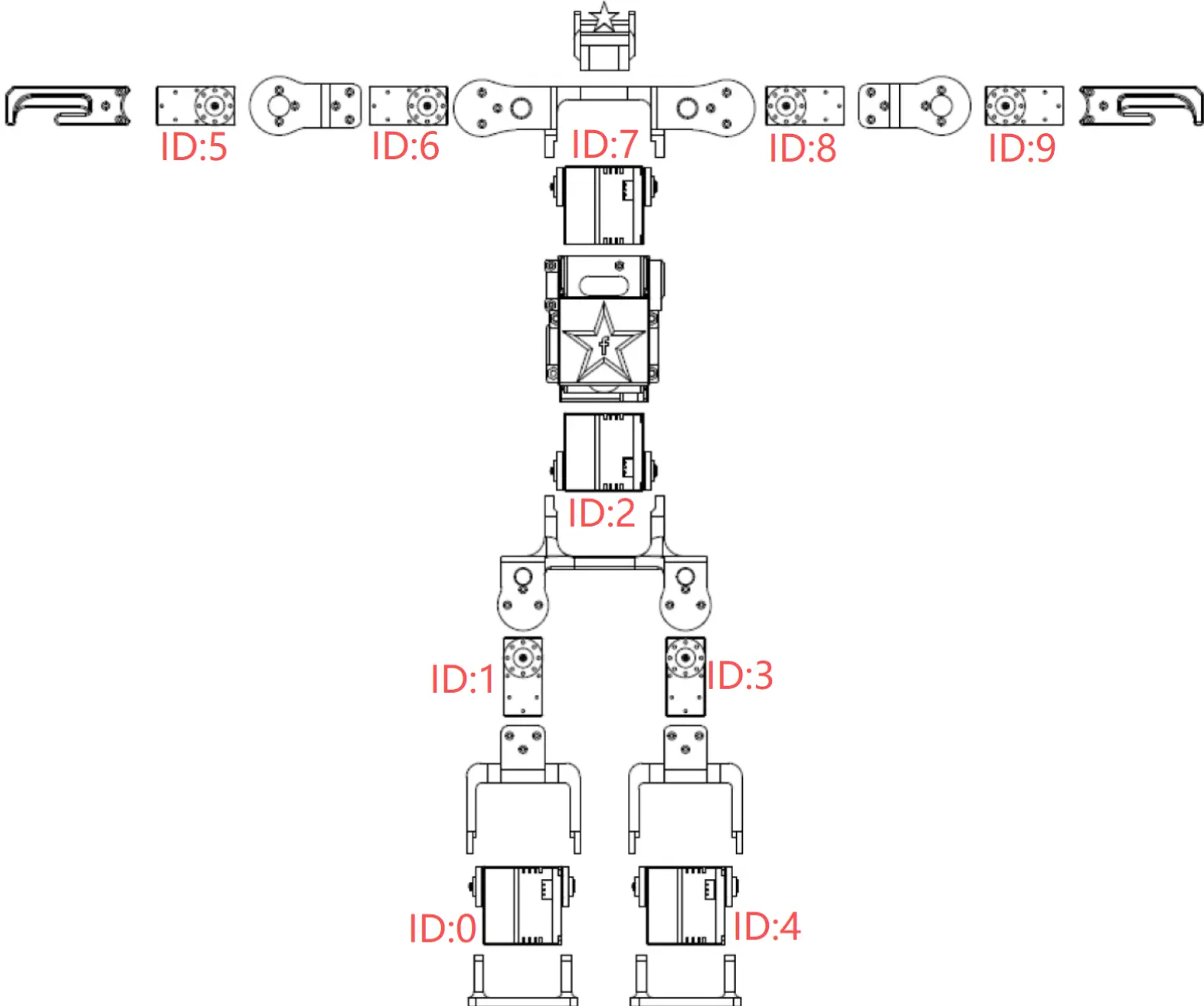
6. 機械構造
- 構造概要 & デフォルトサーボ ID
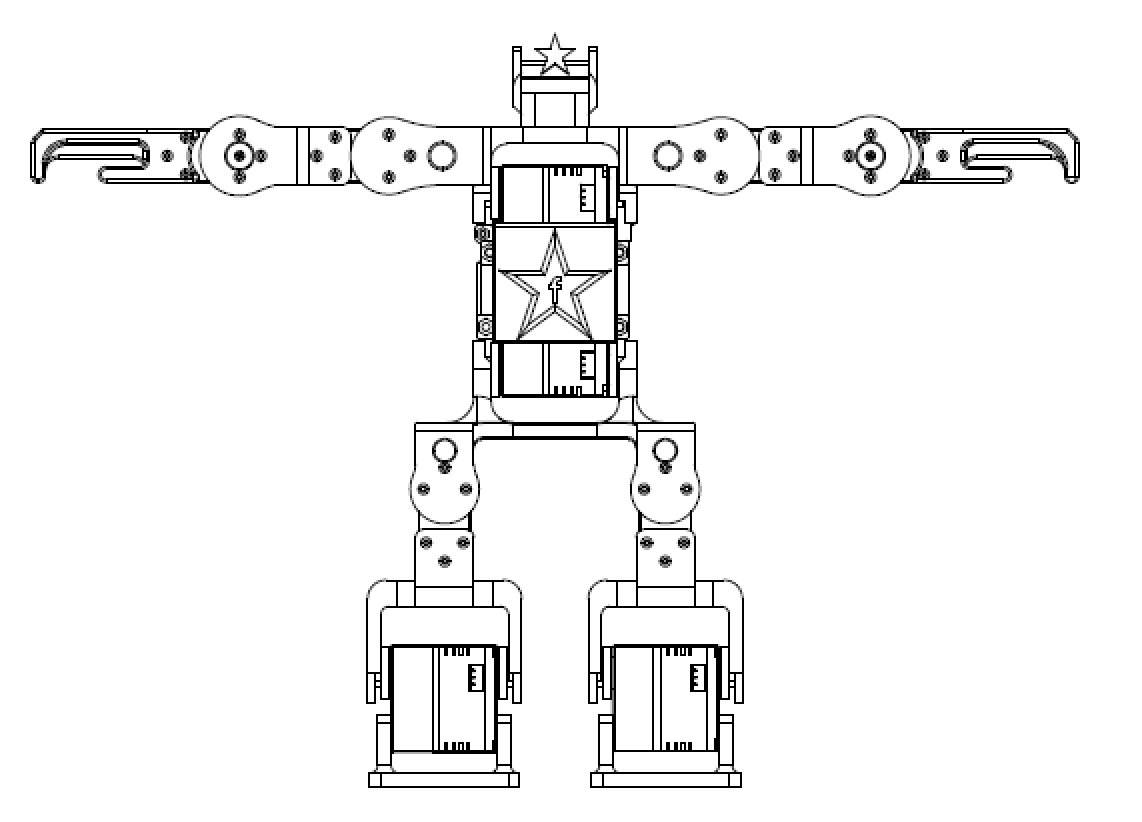
- 全サーボのゼロ度姿勢
7. 図面 & モデルデータのダウンロード
完全な 3D プリントデータを入手するには、次のページをご覧ください: MakerWorld - Atom S
今後、より充実した組立動画や図解マニュアルを順次公開していきます。このページの更新をぜひチェックしてください。
8. 最初のデモを動かしてみよう
開封後すぐに試せるクイックスタートガイド
Atom S は、工場出荷時に基本制御プログラムが書き込まれ、初期組立も完了しています。電源とスマートフォンを用意するだけで、ロボットの動きやリモートコントロール機能をすぐに体験できます。
ハードウェア電源の準備
配送制限により、キットには標準でバッテリーが含まれていません。開始前に互換性のあるバッテリーを用意し、ロボット背面の電源ポートに接続してください。
- バッテリ仕様: 3S 12.6 V Li-Po(リチウムポリマー)バッテリー
- バッテリコネクタタイプ: T プラグ
- 電源投入チェック: 電源を接続すると、メインコントローラボード(XIAO ESP32S3)上のインジケータ LED が点灯し、システムが起動したことを示します。
Web リモートコントローラへの接続
スマートフォンまたは Bluetooth 対応 PC で Bluetooth を有効にし、OS に応じて互換性のあるブラウザを選択してください。Web リモートは基盤となる Web Bluetooth API に依存しているため、ブラウザの互換性が重要です。
- PC(Windows / macOS): Google Chrome または Microsoft Edge を使用してください。
- Android: Google Chrome を使用してください。システム標準ブラウザや WeChat のスキャンからの起動は使用しないでください。
- iOS: Safari、Chrome、Edge は Web Bluetooth をサポートしていません。App Store から Bluefy など WebBLE プロトコルをサポートするサードパーティブラウザをダウンロードしてください。
アクセス URL: Remote Controller
- 未接続状態:

- 画面上部の SYSTEM LINK ボタンをタップしてデバイスを検索・接続します。
- 表示された Bluetooth デバイス一覧から ESP32_Pro_Remote という名前のデバイスを選択し、ペアリングをタップします。
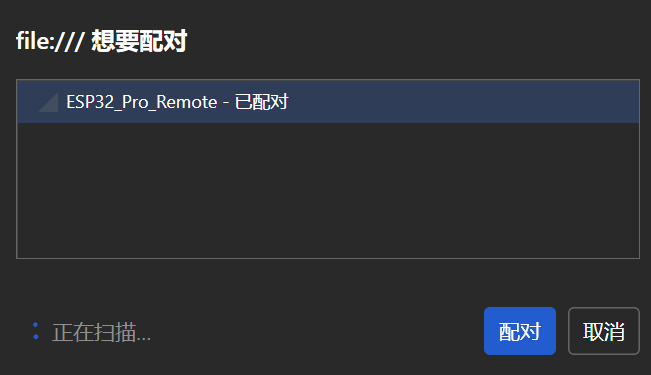
- 接続済み:接続が完了すると、ロボットは自動的に「おじぎ」動作を行い、デフォルトの直立姿勢に戻ります。これにより、システムが準備完了であることを示します。

最初の連続モーションティーチングシーケンスを始める
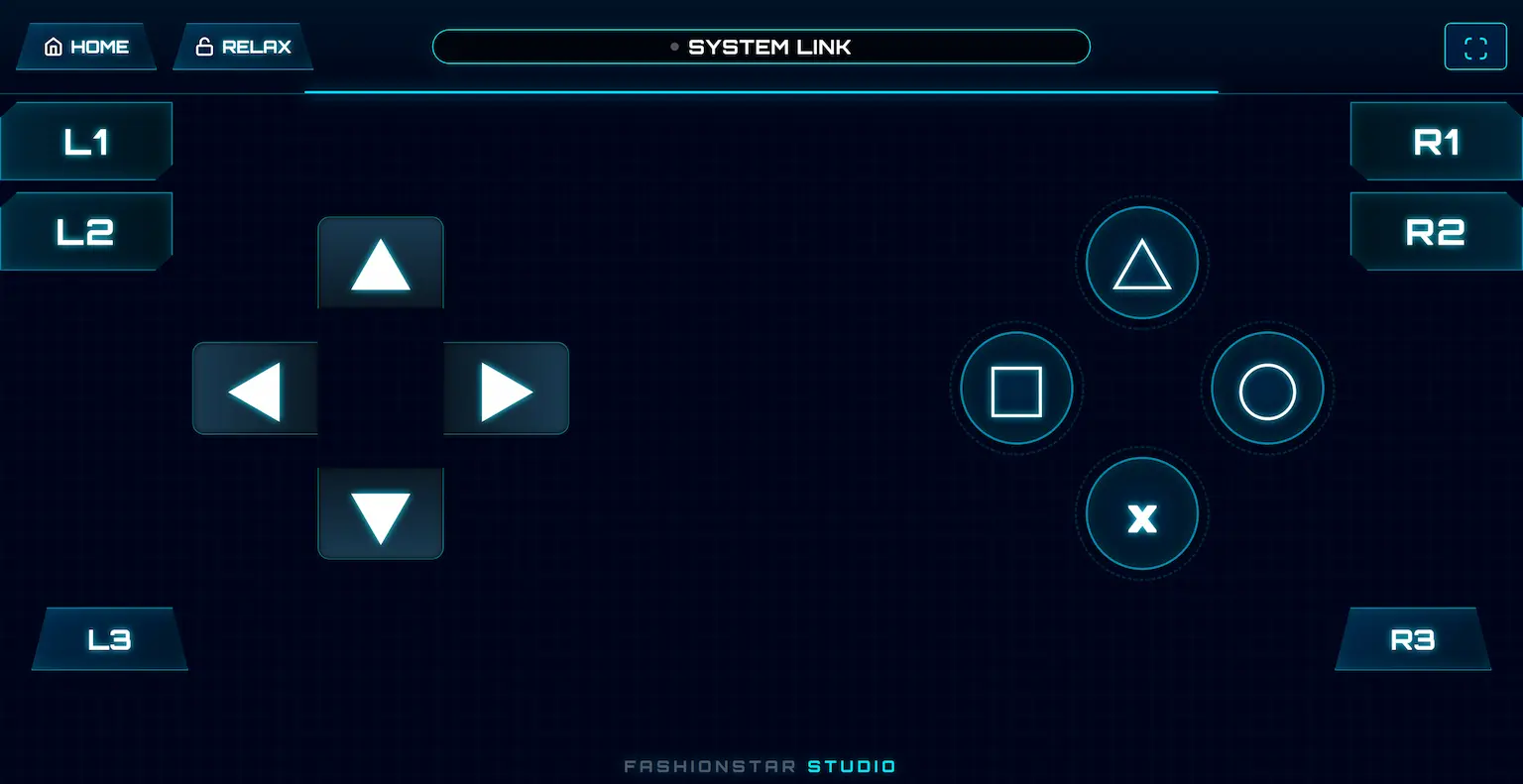
Web 仮想ゲームパッドを使うことで、コードを書くことなく、ロボットに素早く連続モーションシーケンスを教えることができます:
- 準備:左上の HOME ボタンをタップして、ロボットが標準的な初期直立姿勢になっていることを確認します。
- 関節のロック解除:左上の RELAX ボタンをタップして、ロボットをダンピングモードにします。この時点で、すべてのサーボの電源が切られ、各関節を手動で動かすことができます。
- 最初のフレームを記録:ロボットのポーズを手動で取らせ、Left ◀ 方向キーをタップして現在のポーズを記録します。
- 後続フレームを記録:ロボットのポーズを変更し、再度 Left ◀ をタップします。この操作を繰り返してモーションフレームのシーケンスを記録します。デフォルトで最大 100 フレームまでサポートされます。
- モーションシーケンスを再生:すべてのポーズを記録したら、Right ▶ 方向キーをタップすると、ロボットは記録されたすべての動作をスムーズに再生します。
- 再生速度の調整:再生が速すぎる、または遅すぎる場合は、Up ▲(加速)または Down ▼(減速)をタップしてモーション速度を調整します。
- ワンキー・デモ:右側の Square □ ボタンをタップすると、工場出荷時のデフォルトデモモーションを直接再生します。
クイック体験を完了し、さらにモーション JSON のエクスポート、メインコントローラロジックの変更、または他のコントローラとの接続を行いたい場合は、以下のセクションを続けてお読みください。
9. カスタムモーション開発のコアワークフロー
ポーズ設計とデータエクスポート(Web Motion Editor)
-
接続と読み取り:PC ブラウザから RUC-01 インターフェースボードに接続し、ロボットのサーボ状態をリアルタイムで読み取ります。
-
ロック解除とティーチング:ワンクリックでサーボの電源を切りダンピングモードにし、ロボットを手動で動かして各フレームのポーズを記録します。
-
配置と微調整:キーフレーム間の実行時間とインターバルを調整し、ソフトウェア内でリアルタイム再生してモーションの滑らかさを最適化します。
-
JSON エクスポート:モーションが正しいことを確認したら、モーショングループ全体を標準的な
.jsonファイルとしてエクスポートします。
データ統合とファームウェア書き込み(ESP32 メインコントローラ)
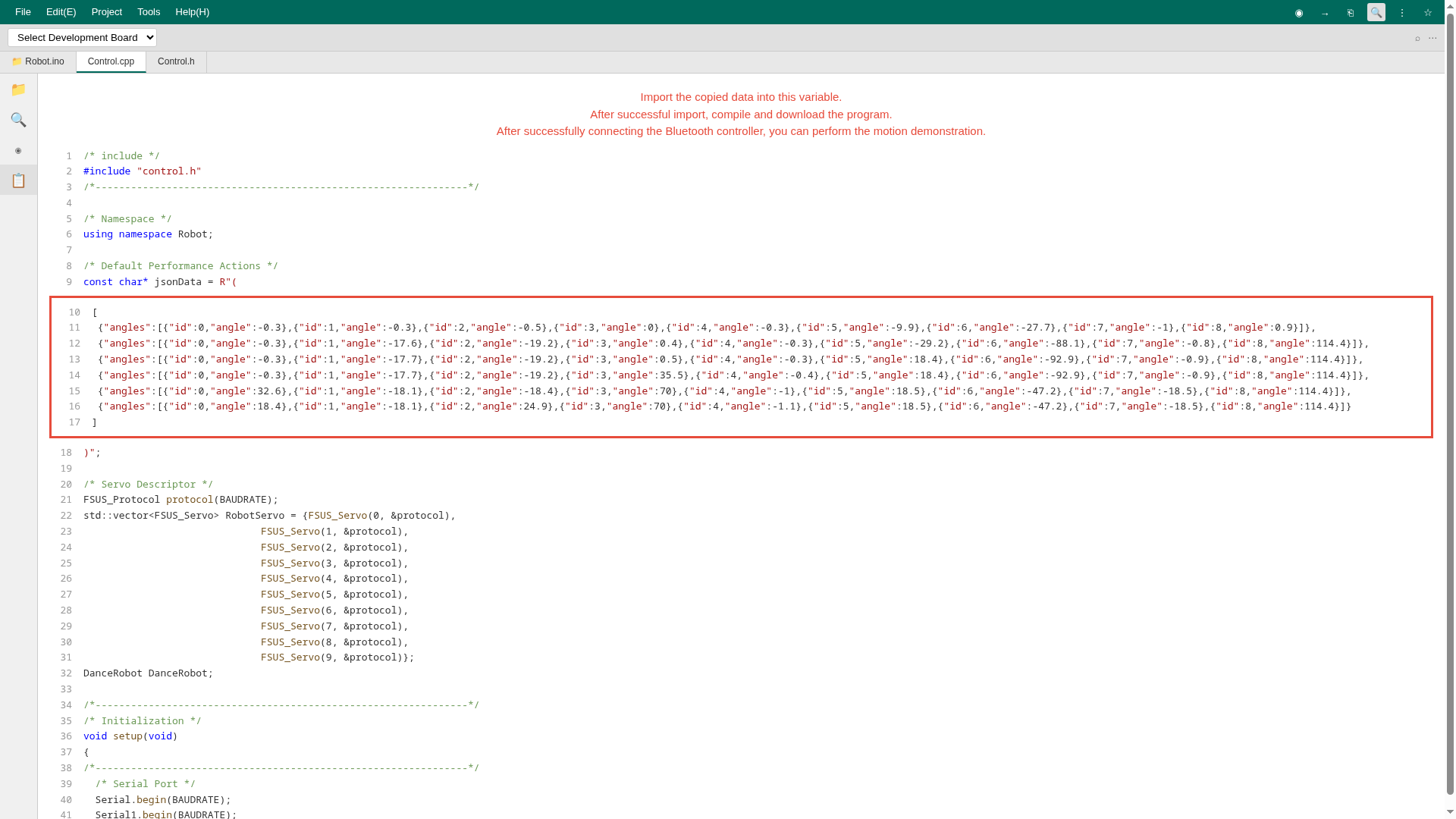
- オープンソース:付属の ESP32 メインコントローラプロジェクトのソースコードを Arduino IDE で開きます。
- コードの置き換え:エクスポートした
.jsonデータをすべてコピーし、Robot.inoファイル内の既存のjsonData変数の内容を置き換えます。 - コンパイルと書き込み:プロジェクトを再コンパイルし、更新されたファームウェアを ESP32S3 メインコントローラボードに書き込みます。
無線リモコンとトリガー実行(Web Remote Terminal)
- 無線接続:スマートフォンで Remote Controller の Web リモコンを開き、ロボットとペアリングします。
- ワンキートリガー:インターフェース上の Square □ ボタン(コマンド
0x10)をタップすると、ロボットはデータケーブルなしで、新しく設計したモーションシーケンスを自律的かつ連続的に実行します。
Motion Editor ガイド
エディタレイアウト
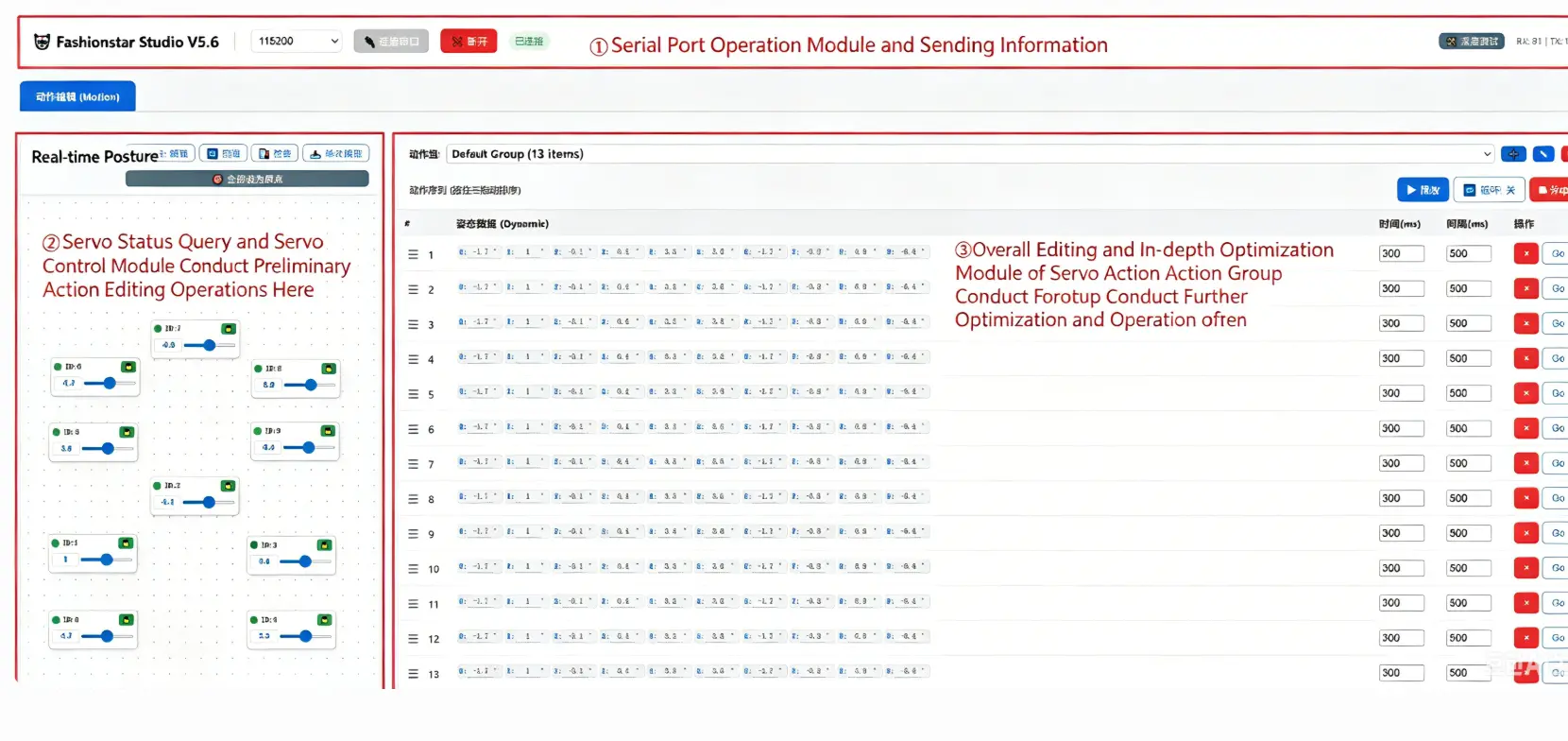
3 つの主要モジュール:
- シリアルポートの接続 / 切断とメッセージステータス
- サーボステータス / 角度の問い合わせと制御
- モーショングループの最適化とインポート / エクスポート
コントロールリファレンス
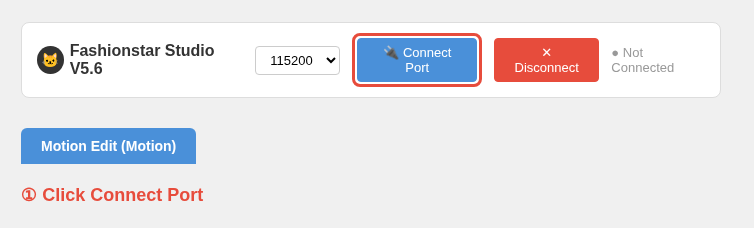
シリアルポートの接続 / 切断

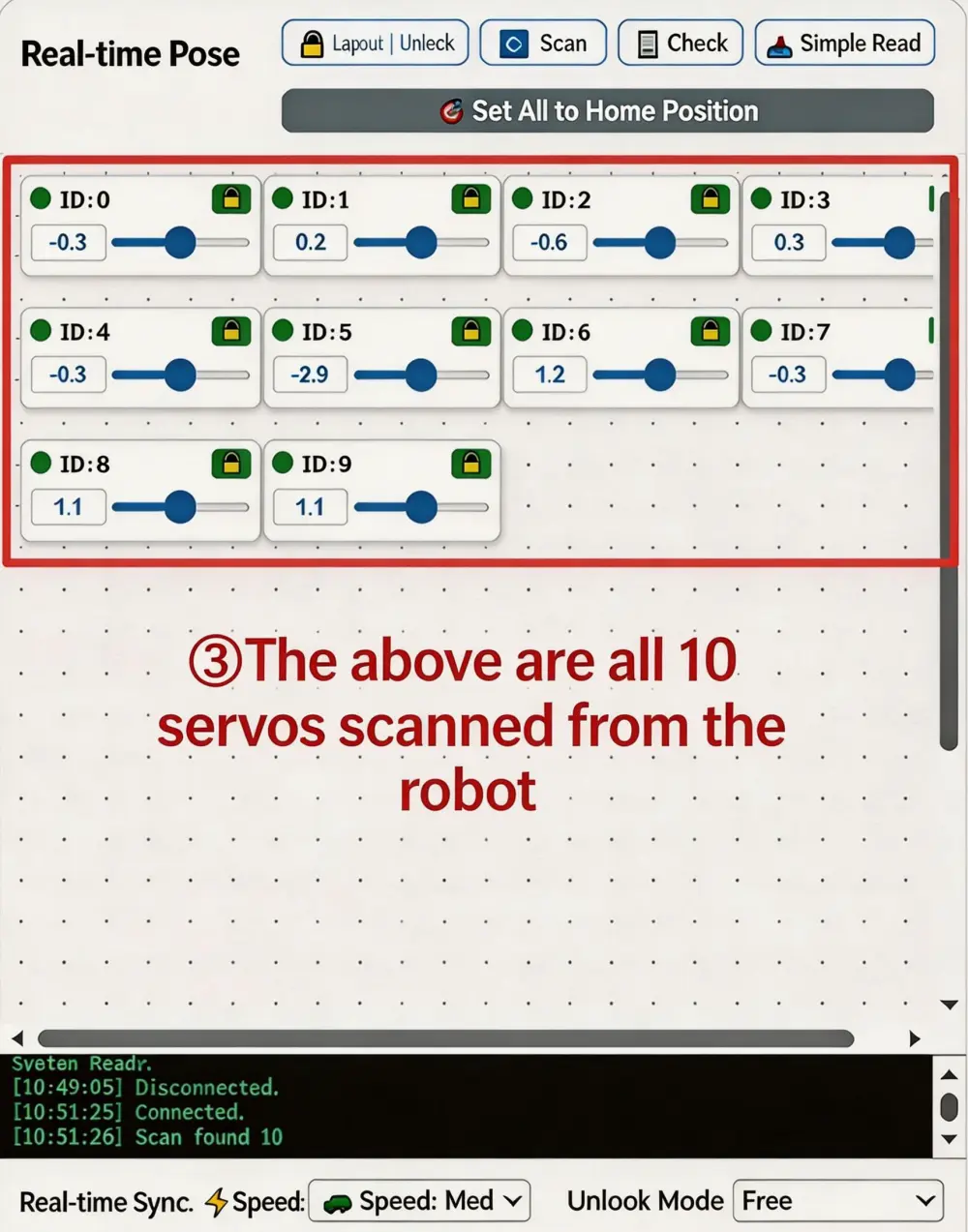
リアルタイムポーズページ
- レイアウト:キャンバス上で各サーボコントロールをドラッグしてロボットパーツを配置します。ID は一対一で対応しており、クリックしてレイアウトをロックします。
- スキャン:オンラインのすべてのサーボを再スキャンします。
- チェック:過電圧 / 低電圧保護、スタール(ロック)、その他の異常状態を確認します。
- 一度読み取り:現在の角度を一度だけ読み取ります。
- ステータスカラー:緑 = 角度制御、赤 = 解放 / ダンピング。

ドラッグによる角度制御:
- リアルタイム読み取り:サーボ角度を連続的に読み取ります。
- 速度:ドラッグ中の速度を制限し、過度な動作を防ぎます。
- ロック解除モード:ティーチング用にサーボを解放します(電源オフ解放 / ダンピング解放)。

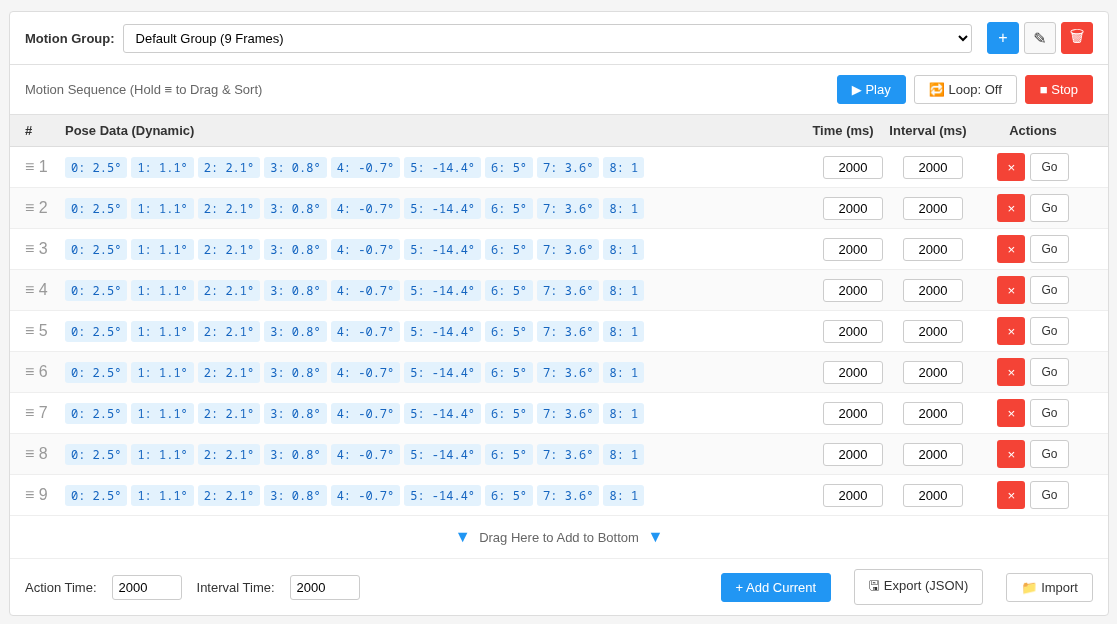
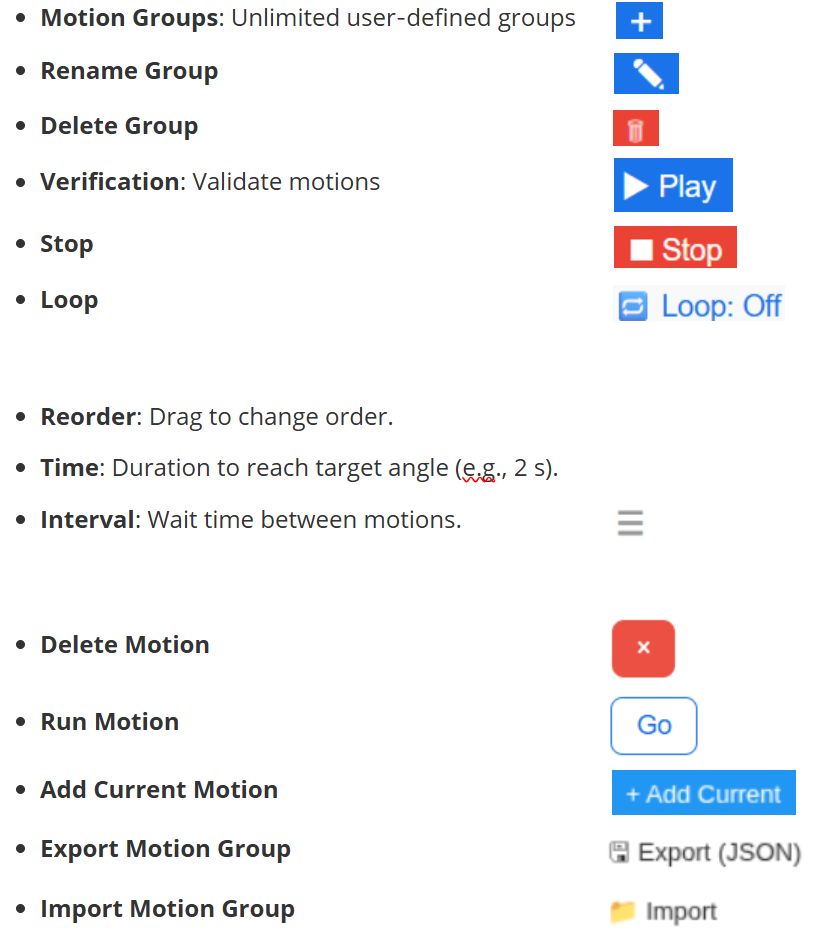
モーショングループページ
以下で各ボタンについて説明します:
エディタからオフラインモーションへ(XIAO ESP32S3 Sense)
- 1. 「Connect」をクリックしてシリアルポートを開きます。
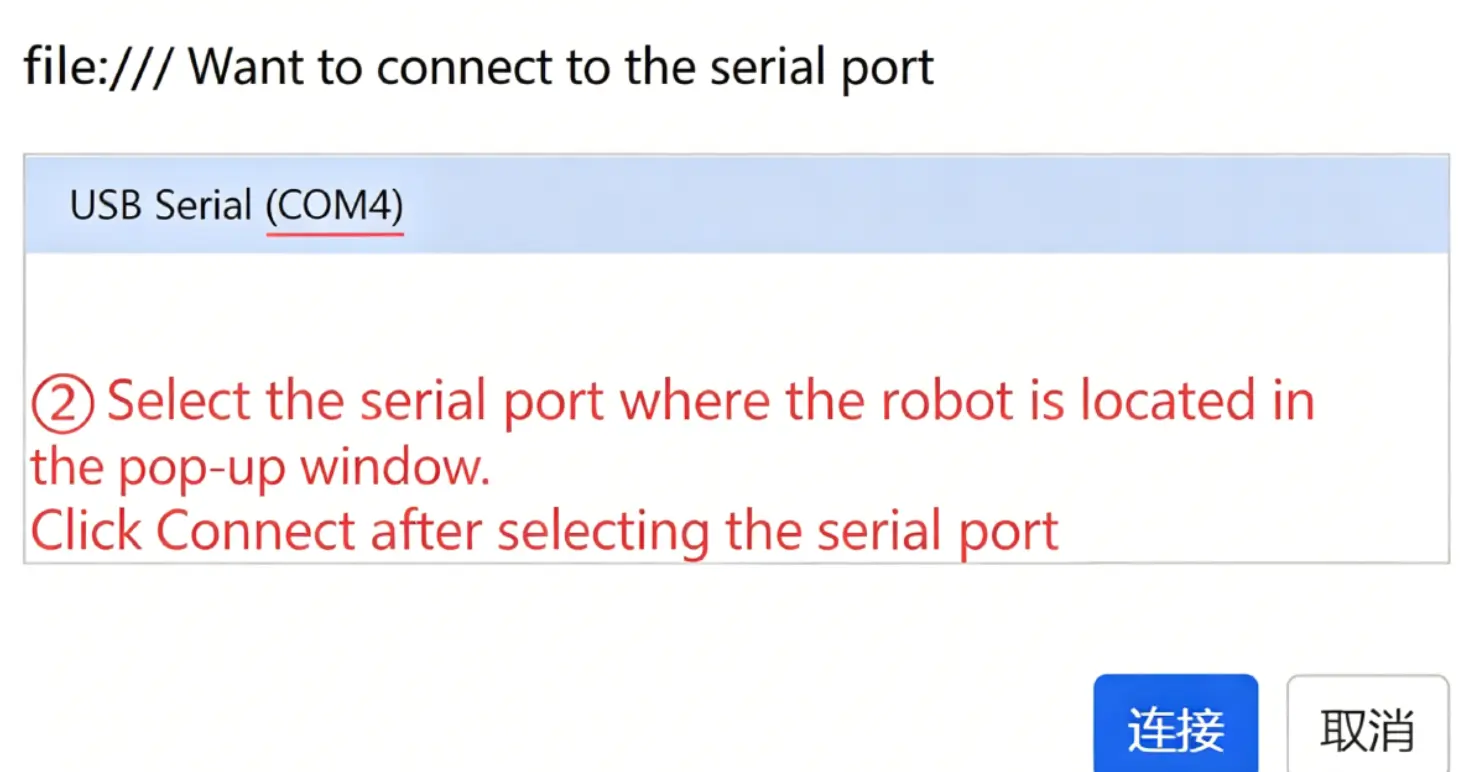
- 2. 対象のシリアルポートを選択します。
- 3. ロボット上のすべてのサーボをスキャンします。
- 4. 「Release All」をクリックして、すべてのサーボの電源を切り手動で位置決めできるようにするか、必要なサーボだけをロック解除します。
- 5. 「Time」と「Interval」を設定します。
- 6. 各編集後に「Add Current」をクリックして、グループに追加します。
- 7. 再生して確認します。
注意
各モーションフレームは個別に編集(角度、時間、インターバル)および検証できます。
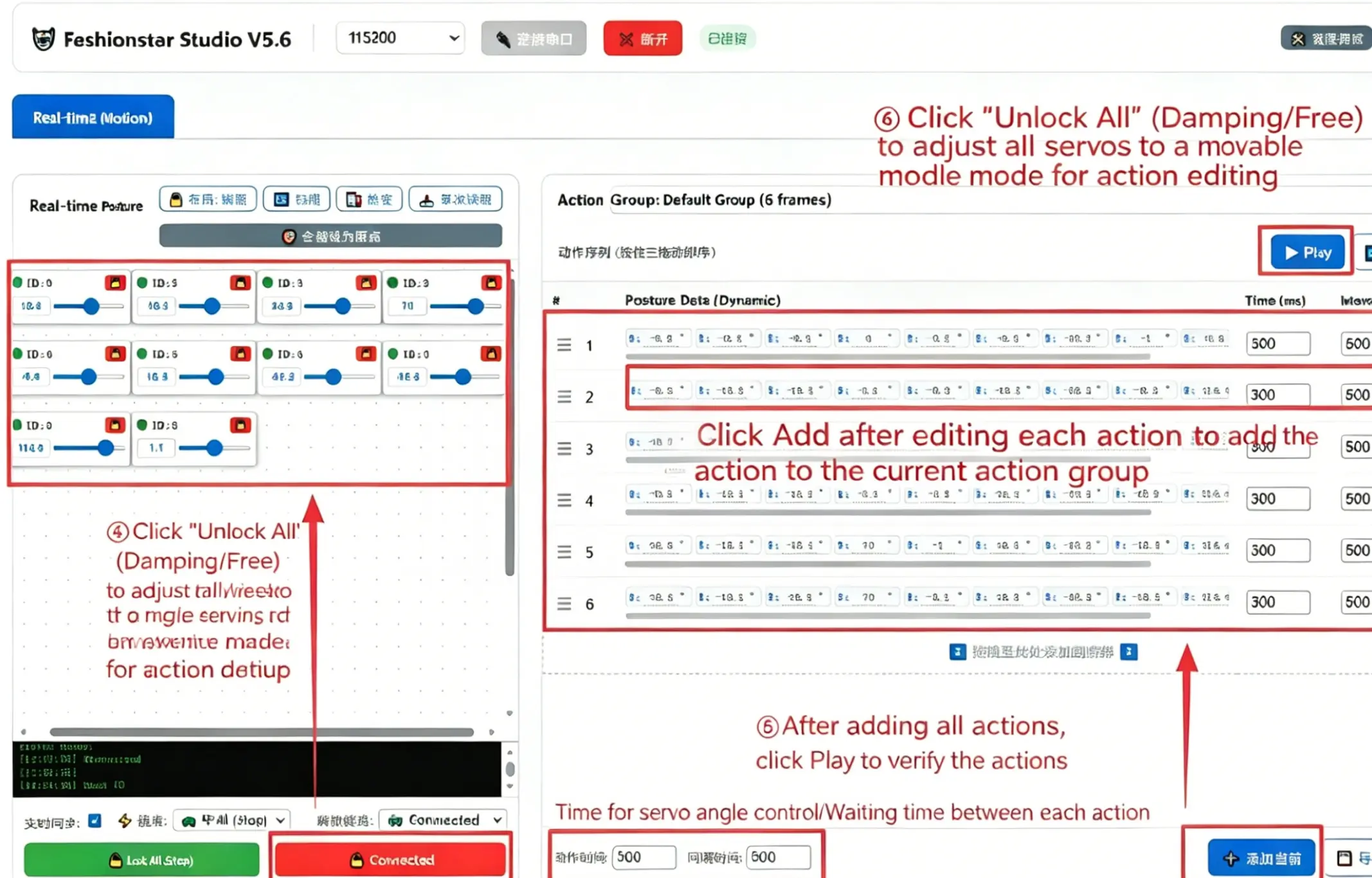
- 8. 「Export (JSON)」をクリックしてモーショングループをエクスポートします。
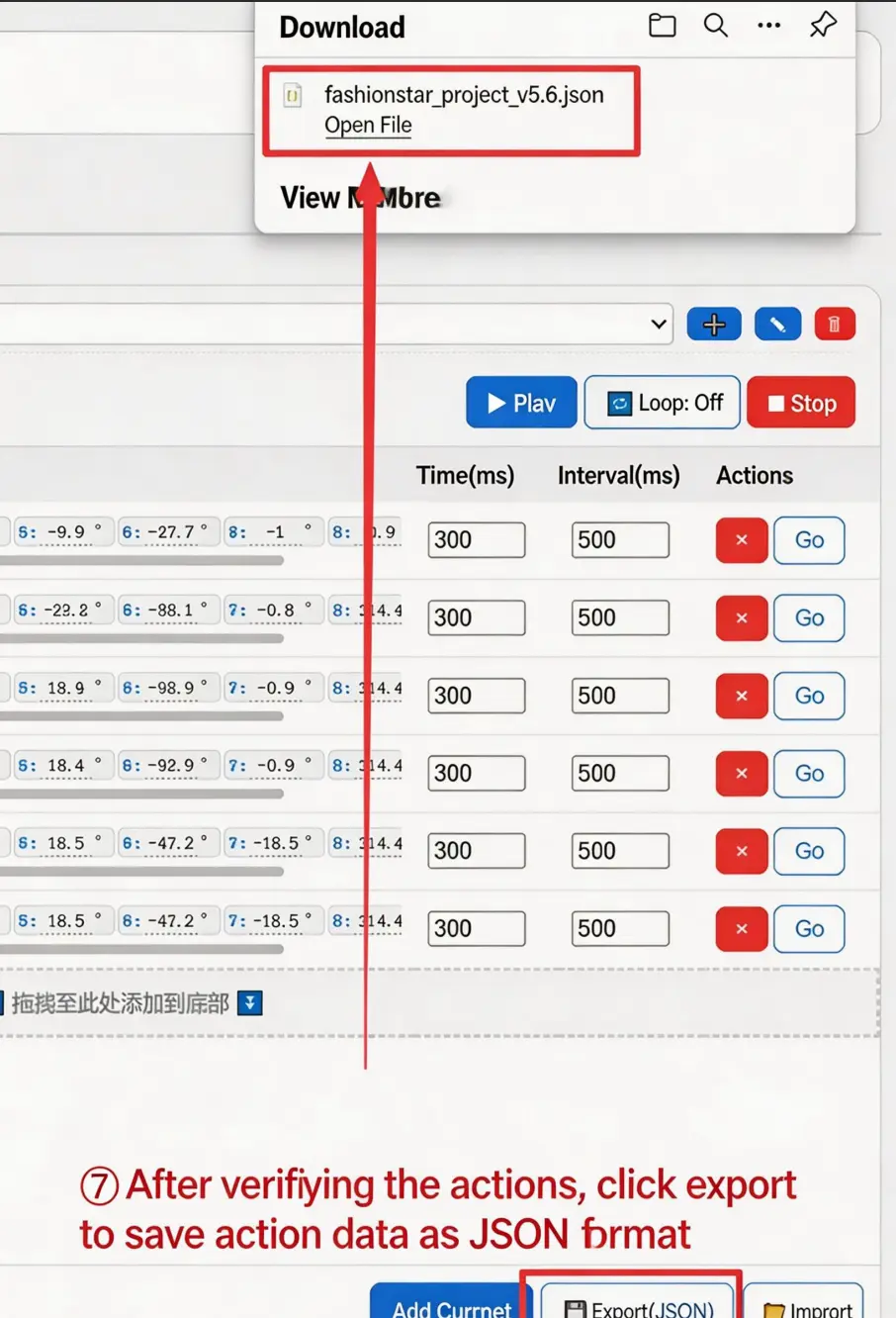
- 9. エクスポートした JSON を開き、
framesの内容(外側の[]を含む)をコピーします。
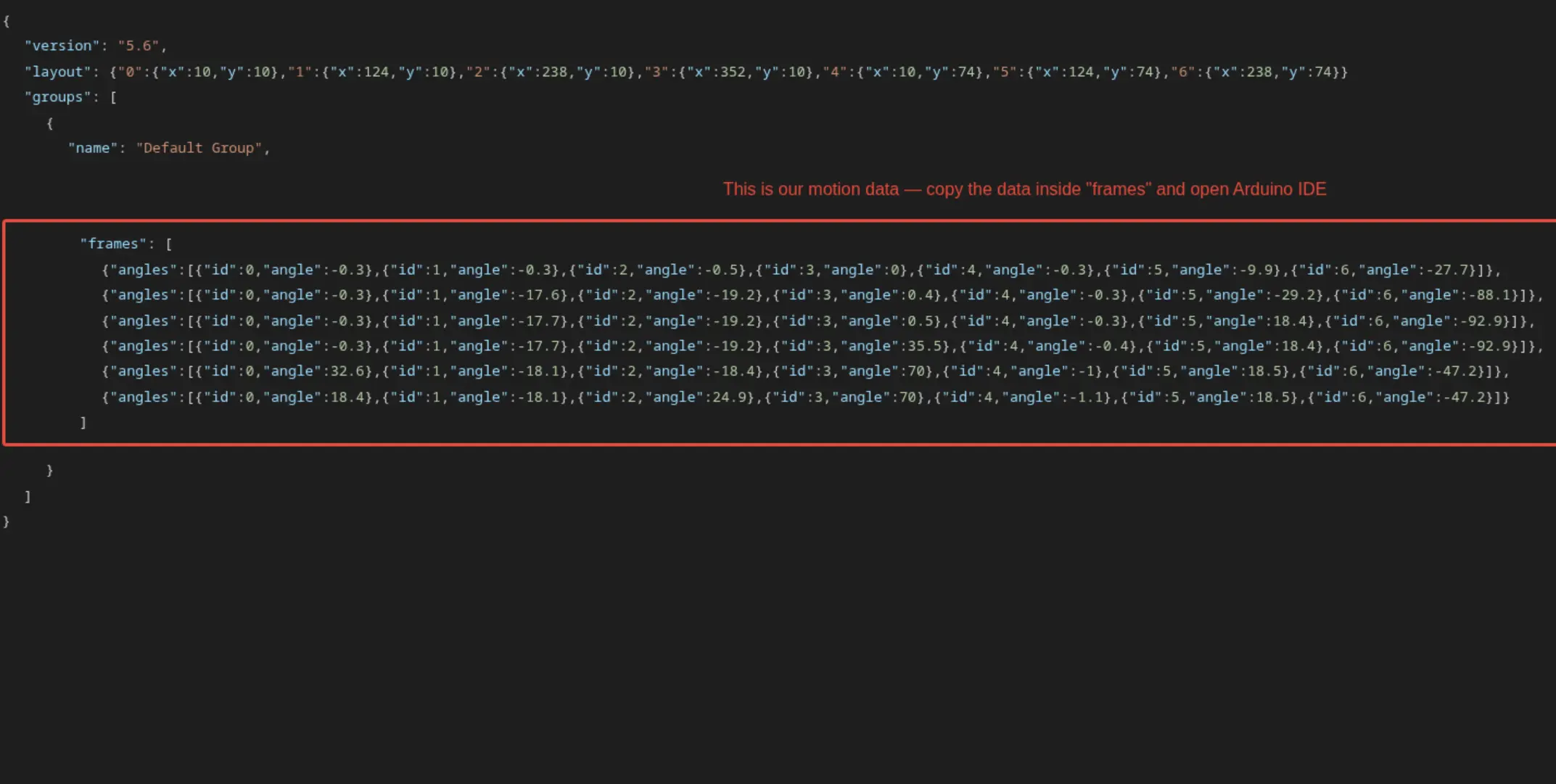
- 10. プログラム内の
jsonDataをコピーした内容で置き換えます。コンパイルと書き込み後、Bluetooth ゲームパッドからロボットを制御できます(詳細は「Robot Control Parameters」を参照)。
ロボット制御パラメータ(必要に応じて調整)
デフォルト値
BAUDRATE: UART ボーレート。SERVO_NUM: サーボの数。
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
Bluetooth(使用する場合)
BLE_NAME: ゲームパッド名。BLE_UUID: ゲームパッド UUID。
/* Bluetooth settings -- modify according to actual conditions */
#define BLE_NAME "LOOKBON" /* Bluetooth name */
#define BLE_UUID "AE02" /* ID for Bluetooth data reception */
Web Remote(使用する場合)
SERVICE_UUID: サービス ID。CHARACTERSTIC_UUID: キャラクタリスティック ID。
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
ティーチングモード
MAX_ACTIONNUM: ティーチングモードで許可されるモーションフレームの最大数。Default_RobotRunSpeed_Demonstration: デフォルトの実行速度。MIN_RobotRunSpeed_Demonstration: 最も遅い実行速度。MAX_RobotRunSpeed_Demonstration: 最も速い実行速度。Adjust_RobotRunSpeed_Step: ティーチングモードでの速度調整ステップ値(1 ステップあたり ±200)。
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
データフィールド(必要に応じてカスタマイズ)
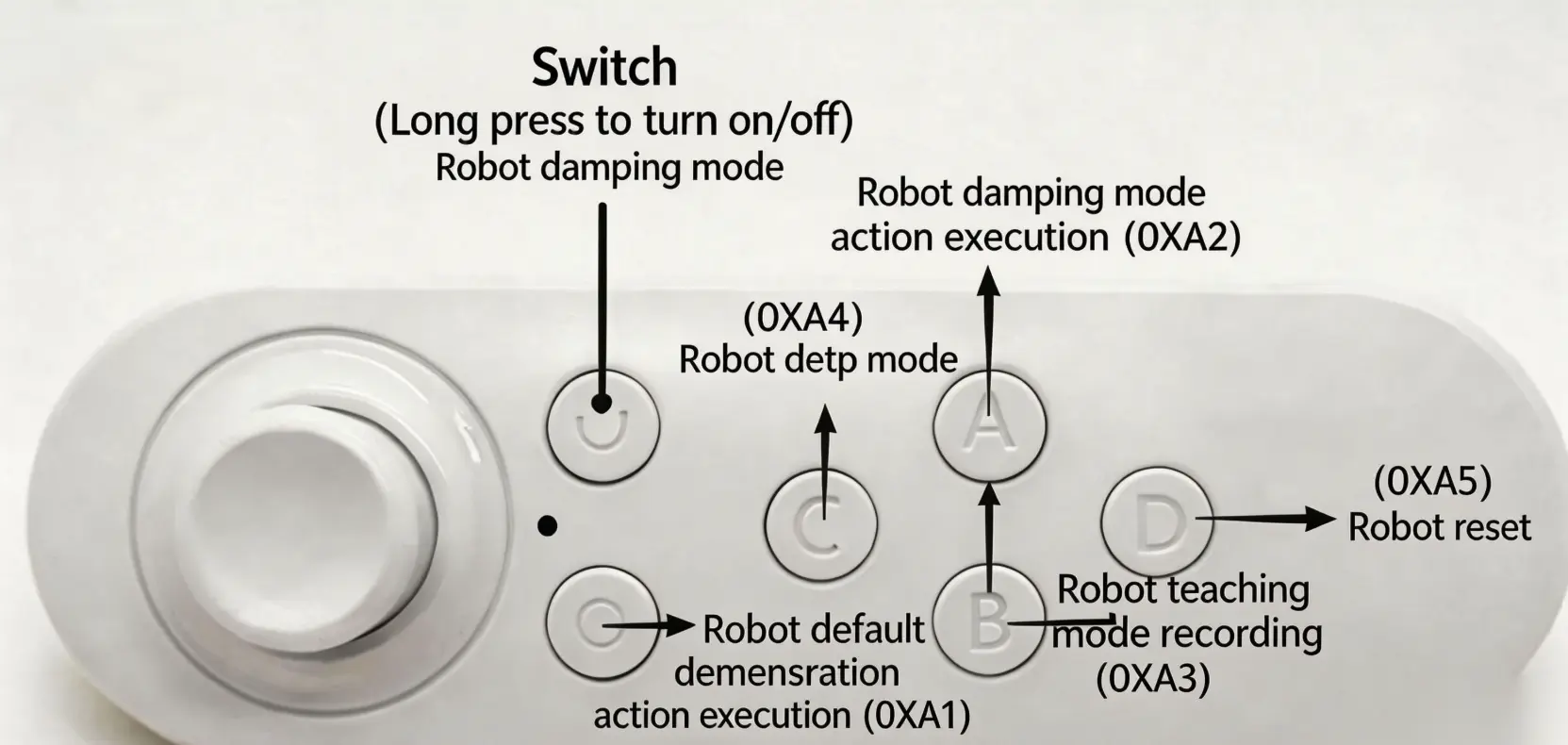
RemoteControl_DefaultDemoAction: デフォルトのデモモーション(エディタからエクスポート)。RemoteControl_Exe: ティーチングモード実行コマンド。RemoteControl_Record: ティーチングモード記録コマンド。RemoteControl_Damping: ダンピングモードコマンド。RemoteControl_Reset: リセットコマンド。RemoteControl_ReduceRunSpeed: ティーチングモード実行速度を下げる。RemoteControl_AddRunSpeed: ティーチングモード実行速度を上げる。
Bluetooth に関する注意:実際のコントローラデータはお使いのデバイスに依存します。必要に応じてコード内でボタンを定義してください。
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0xA1 /* Default demonstration motion */
#define RemoteControl_Exe 0xA2 /* Teaching mode execution command */
#define RemoteControl_Record 0xA3 /* Record motion command */
#define RemoteControl_Damping 0xA4 /* Damping mode command */
#define RemoteControl_Reset 0xA5 /* Robot reset command */
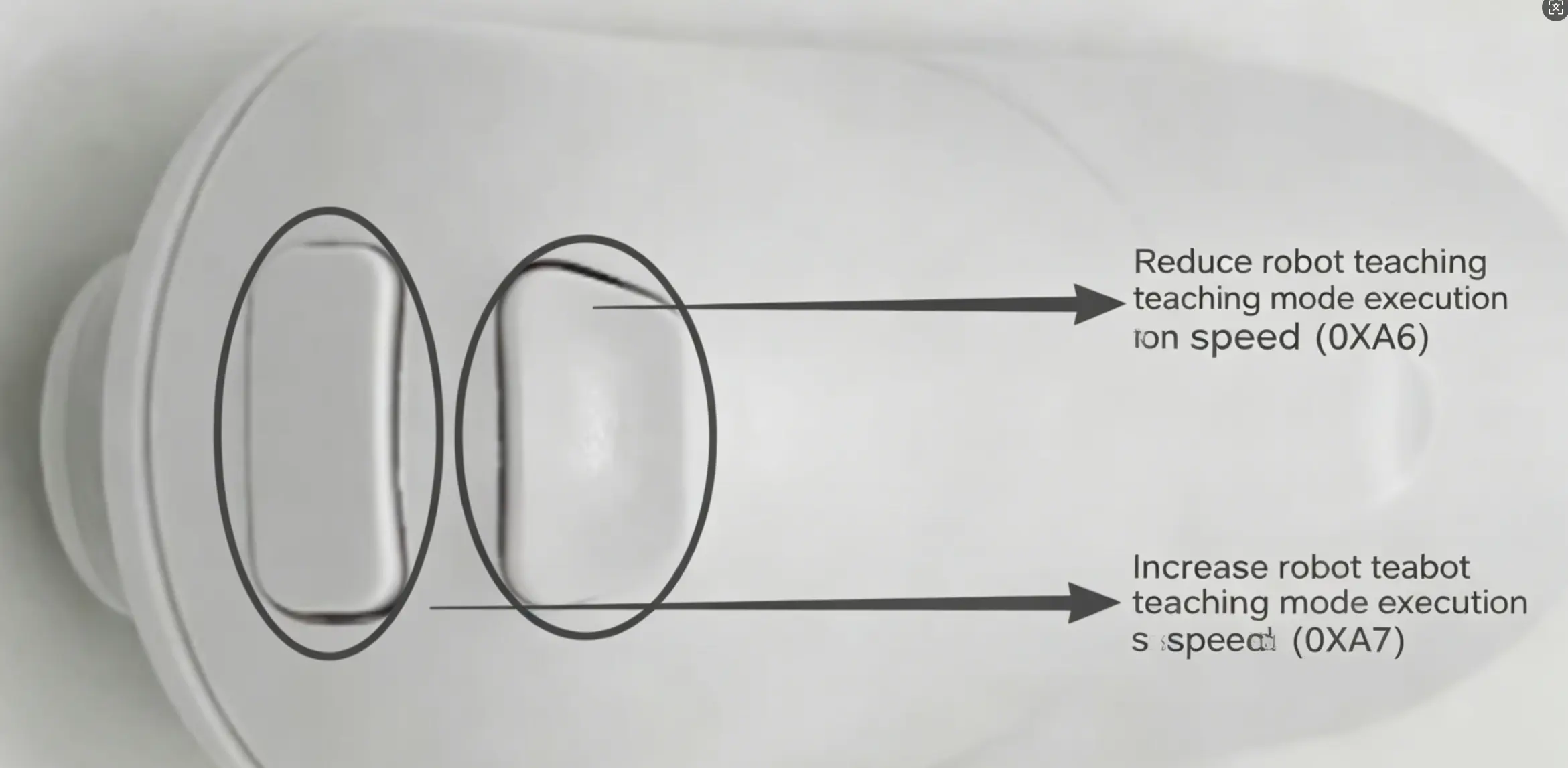
#define RemoteControl_ReduceRunSpeed 0xA6 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0xA7 /* Increase teaching run speed */
Web リモートに関する注意:同様に、統合前にデータおよびボタンのマッピングを必ず確認してください。
/* Web remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command */
#define RemoteControl_Record 0x04 /* Record motion command */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed */
#define RemoteControl_Damping 0x04 /* Damping mode command */
#define RemoteControl_Reset 0x08 /* Robot reset command */
リセット角度
ROBOT_RESET_POSITION_0~ROBOT_RESET_POSITION_9: サーボ ID 0~9 のゼロ位置(ロボットのリセットポーズ)。
注意:これらはロボットのリセットポーズに合わせて変更してください。
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 0;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = 0;
constexpr float ROBOT_RESET_POSITION_9 = 0;
リモートコントロール リファレンス
Bluetooth ゲームパッド
- ゲームパッドの電源ボタンを長押しして電源を入れ、MCU(XIAO_ESP32S3)とペアリングします。
- ペアリングが成功すると、ロボットがおじぎしてリセットします。
モーション機能:
- "Run Motion": 内蔵モーションを実行します。
- "Reset Robot": リセットポーズに戻します。
- "Damping Mode": 関節を自由に動かせるティーチング状態に入ります。
- "Record Teaching Motion": 現在のモーションを記録します。
- "Execute Teaching Motion": 記録済みモーションを実行します(デフォルトではクリアされません)。
- "Decrease Teaching Speed": 実行速度を下げます(右腕サーボ ID 6 のスイングで速度を示します)。
- "Increase Teaching Speed": 実行速度を上げます(右腕サーボ ID 6 のスイングで速度を示します)。
10. 標準メインコントローラ ファームウェア書き込みガイド(Seeed Studio XIAO ESP32S3 ベース)
このセクションは標準の XIAO ESP32S3 メインコントローラ環境にのみ適用されます。プロジェクトで STM32 や Raspberry Pi を使用している場合は、付録のマルチプラットフォーム Fashionstar サーボ制御 SDK を直接参照してください。
開発環境のセットアップ(Arduino IDE)
公式 Arduino ウェブサイトから最新の Arduino IDE をダウンロードしてインストールします。Arduino IDE 2.x を推奨します。
ESP32 ハードウェアサポートパッケージの導入
まず Arduino IDE の Preferences を開きます:
- Windows:
File > Preferences - macOS:
Arduino IDE > Settings...またはPreferences...
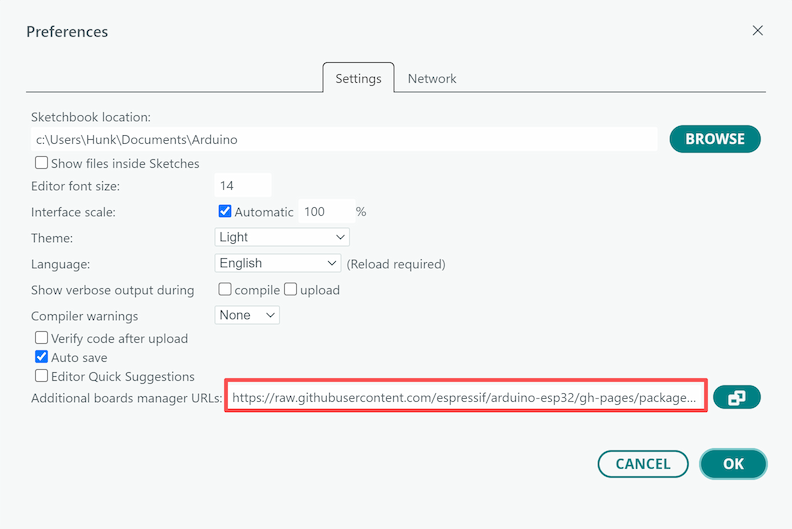
"Additional Boards Manager URLs" に次の URL を入力します:
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
ESP32 ビルド環境の展開(バージョン要件厳守)
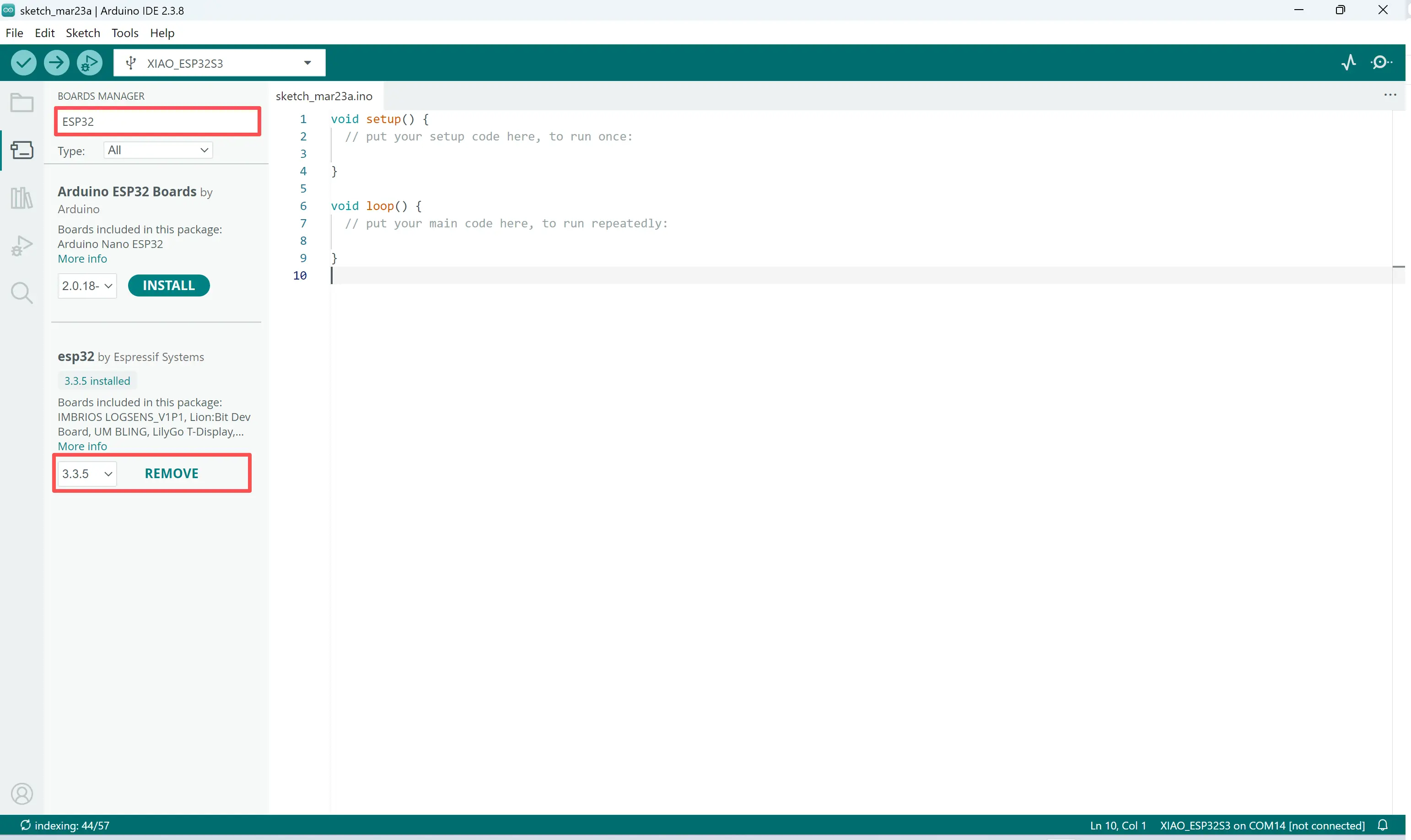
Tools > Board > Boards Managerを開きますesp32を検索しますEspressif Systems提供のパッケージを見つけます- バージョン 3.3.5 を手動で選択してインストールします
最新バージョンをそのままインストールしないでください。本プロジェクトの Bluetooth とバスドライバの組み合わせにはバージョン 3.3.5 が必要であり、これ以外では Bluetooth やバス通信がコンパイルエラーや異常動作を起こす可能性があります。
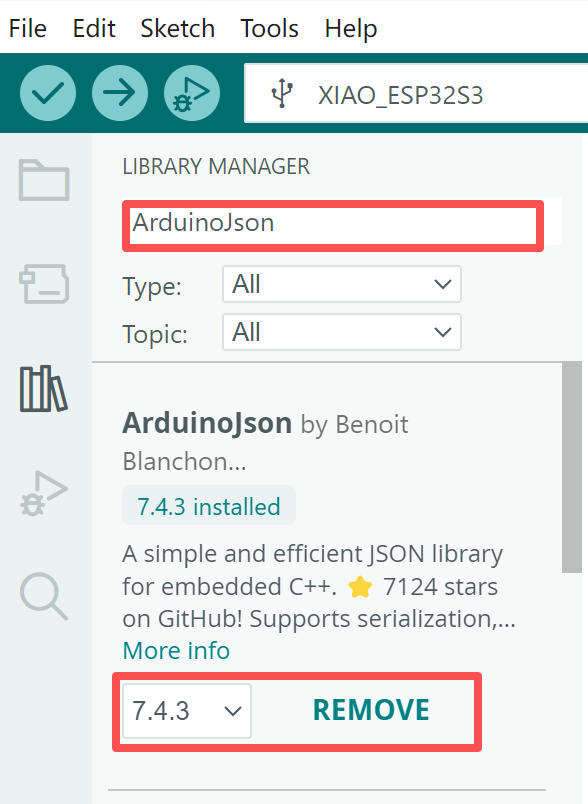
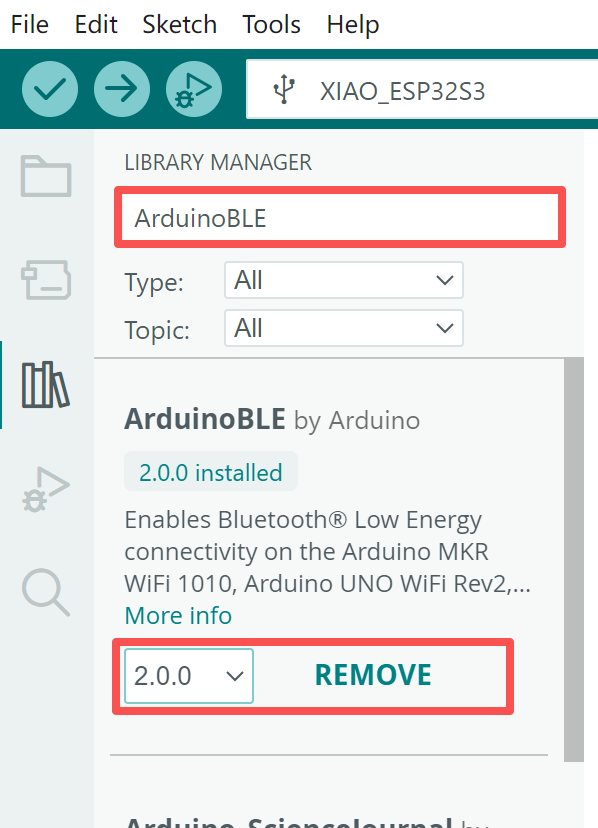
必要なライブラリのインストール(ArduinoJson と ArduinoBLE)
システムは JSON パースと Bluetooth サービスのために、以下のサードパーティライブラリに依存しています:
ArduinoJsonArduinoBLE
インストール方法:
Sketch > Include Library > Manage Libraries...を開きますArduinoJsonを検索してインストールしますArduinoBLEを検索してインストールします
Fashion Star サーボ コアドライバ SDK の展開
下位ドライバを正しく呼び出すため、公式 SDK を手動でインストールする必要があります:
- 同梱の資料パッケージ内から
fashionstar-uart-servo-arduino-sdk-V2.rarを探します - アーカイブを解凍します
- SDK フォルダ全体を Arduino のデフォルトライブラリディレクトリにコピーします
デフォルトライブラリパス:
- Windows:
C:\Users\Username\Documents\Arduino\libraries - macOS:
~/Documents/Arduino/libraries
コピー後、Arduino IDE を完全に閉じてから再度開き、ローカルライブラリを再読み込みさせます。
ボードの選択とコンパイル / 書き込み
- XIAO ESP32S3 を Type-C データケーブルで PC に接続します
Tools > Board > esp32を開き、XIAO_ESP32S3を選択しますTools > Portを開き、メインコントローラボードに対応するポートを選択します
ポート名は通常次のように表示されます:
- Windows:
COM3、COM5など - macOS:
/dev/cu.usbmodem...または/dev/cu.usbserial...
最後に、Arduino IDE でプロジェクトのソースコード(.ino)を開き、左上の Upload ボタンをクリックし、コンソールに "Upload successful" と表示されるまで待ちます。
11. 低レベル制御パラメータ設定仕様(標準メインコントローラ Seeed Studio XIAO ESP32S3 ベース)
Arduino IDE でプロジェクトのソースコードを開いた後、以下のマクロ定義および定数を、実際のプロジェクト要件に応じて変更できます。各パラメータがどのファイルに存在するかを確認し、誤って変更しないようにしてください。
基本ハードウェアパラメータ
Control.h 内にあります
BAUDRATE: メインコントローラと RUC-01 間の通信に使用するシリアルボーレートSERVO_NUM: ロボットサーボの総数
/* User-modifiable robot data area */
/* define */
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
UART 物理ピンのリマッピング
Robot.ino 内にあります
TX_PIN/RX_PIN: ESP32S3 と RUC-01 アダプタボード間の通信に使用するシリアルピン
/* Serial1 -- GPIO D6 = GPIO43 D7 = GPIO44 */
#define TX_PIN 43
#define RX_PIN 44
Web リモート Bluetooth 通信パラメータ
Robot.ino および Control.h 内にあります
BLE_NAME: Bluetooth ブロードキャスト名SERVICE_UUID/CHARACTERISTIC_UUID: Web リモートとメインコントローラが通信を確立するために使用するサービス UUID とキャラクタリスティック UUID
/* Set Bluetooth name */
BLE.setLocalName("ESP32_Pro_Remote");
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
ティーチングモード パラメータリファレンス
Control.h 内にあります
MAX_ACTIONNUM: ティーチングモードで記録可能なモーションフレームの最大数Default_RobotRunSpeed_Demonstration: デフォルトの実行速度MIN / MAX_RobotRunSpeed_Demonstration: 速度調整の上下限Adjust_RobotRunSpeed_Step: 速度を増減させる際のステップ値
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
ボタンデータおよびコマンドマクロ定義
Control.h 内にあります
ワイヤレスリモート通信では、Web リモートはボタン状態を 2 つの独立した変数にパックします:
btn_Main: メイン操作エリアのボタンbtn_border: システム制御エリアのボタン
そのため、一部の 16 進コマンドは両方のエリアに現れる場合がありますが、対応する変数が異なるため競合しません。
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
/* The following commands correspond to btn_Main (red hexadecimal labels in the mapping diagram) */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion command (Square button) */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command (D-pad Right) */
#define RemoteControl_Record 0x04 /* Record motion frame command (D-pad Left) */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed (D-pad Down) */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed (D-pad Up) */
/* The following commands correspond to btn_border (yellow hexadecimal labels in the mapping diagram) */
#define RemoteControl_Damping 0x04 /* Damping / release mode command (RELAX button) */
#define RemoteControl_Reset 0x08 /* Robot reset command (HOME button) */
モーショングループデータ マウント領域
Robot.ino 内にあります
モーションエディタからエクスポートした .json データを jsonData 変数内にコピーし、R( と );` を保持します:
/* Default demonstration motion */
const char* jsonData = R"(
[
// Paste the JSON data exported from the motion editor here, completely replacing this section
{"angles":[{"id":0,"angle":0},{"id":1,"angle":0} ... ],"time":2000,"delay":500}
]
)";
JSON バッファ割り当てサイズ
Control.cpp 内にあります
モーションシーケンスが長すぎると、実行時メモリが不足したり、JSON パースに失敗する可能性があります。この場合は、DynamicJsonDocument の容量を適切に増やしてください:
/* Create a JSON document object with sufficient space allocated */
DynamicJsonDocument doc(4096);
モーションの複雑さに応じて、8192 以上に増やしてください。
ロボットのリセット角度パラメータとゼロ点補正
Control.h 内にあります
ROBOT_RESET_POSITION_0 ~ 9:それぞれサーボ ID 0〜9 のゼロ初期角度に対応します
機械組立ての公差により、各ロボットの絶対ゼロ位置にはわずかな個体差があります。ロボットの直立姿勢を確認したうえで、これらのパラメータを微調整して補正することを推奨します。
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 90;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = -90;
constexpr float ROBOT_RESET_POSITION_9 = 0;
12. Web リモートターミナル機能辞書と下位レベルマッピング
ブラウザ互換性と基本的な Bluetooth ペアリング手順については、まず本書の第 2 章を参照してください。本章では主に、制御インターフェース上のボタン配置と、後続の二次開発を容易にするための下位レベルの 16 進マッピング関係について説明します。
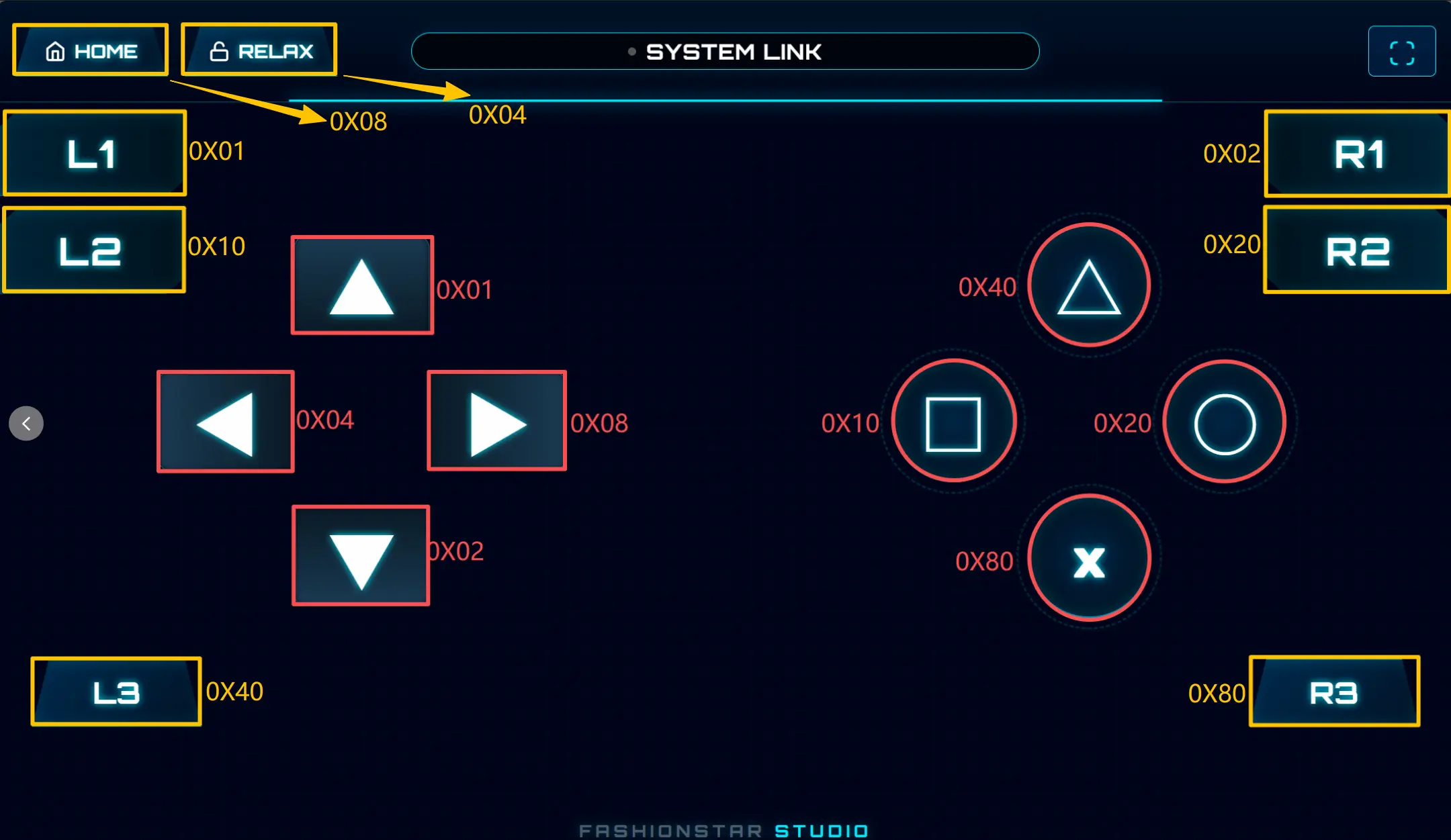
システム制御エリア
対応するコード変数:btn_border
このエリアは主にインターフェースの上部および端に配置されており、ロボットのグローバル状態を制御するために使用されます:
- HOME (
0x08):現在のモーションを中断し、ロボットをデフォルトのキャリブレーション済み直立姿勢に戻し、メモリ上のティーチングデータを消去します - RELAX (
0x04):ダンピング/フリーモードに入り、すべてのサーボの保持トルクを解除して、手動ティーチングを容易にします - その他の黄色ラベルボタン:
L1、L2、R1、R2、L3、R3など。これらは現行の工場出荷デモではモーションが割り当てられておらず、開発者が必要に応じて拡張できます
メイン操作エリア
対応するコード変数:btn_Main
メイン操作エリアには方向キーと右側のファンクションキーが含まれており、主にモーションの作成と実行を担当します:
- 方向キー 左 ◀ (
0x04):現在のモーションフレームを記録 - 方向キー 右 ▶ (
0x08):現在記録されているモーションシーケンスを再生 - 方向キー 上 ▲ (
0x01):実行速度を上げる - 方向キー 下 ▼ (
0x02):実行速度を下げる - 四角 □ (
0x10):メインコントローラの Flash に事前保存されているデフォルトのjsonDataモーションを実行 - その他の赤色ラベルボタン:
△、○、×など。これらは現行ファームウェアでは未定義であり、必要に応じて下位レベルコードでマッピングできます
FAQ
元の Web サイトページは作成中です。利用可能になり次第、内容が追加されます。
よくある質問
Q1: Atom-S にはどのようなバッテリーを使用すべきですか?
A: XT60 コネクタ付きの標準的な 2S または 3S Li-Po(リチウムポリマー)バッテリーを推奨します。
Q2: XIAO ESP32-S3 を別のメインコントローラに置き換えることはできますか?
A: 本設計は XIAO ESP32-S3 に最適化されていますが、十分な GPIO を備えた任意の ESP32 開発ボードであれば、わずかな変更で使用できます。
Q3: ファームウェアはどのように更新しますか?
A: XIAO ESP32-S3 を USB でコンピュータに接続し、Arduino IDE または PlatformIO を開いて新しいプログラムを書き込みます。
Q4: モーションエディタはどこにありますか?
A: Web モーションエディタにはブラウザからアクセスできます。詳細な操作については、第 7.1 章を参照してください。
一般的なトラブルシューティング
ファームウェア書き込みが反応しない/フリーズする
- 症状:Arduino IDE が
A fatal error occurred: Failed to connectと表示する、または書き込み処理が停止したままになる - 対処:
- USB ケーブルを接続したままにする
- 開発ボード上の BOOT ボタンを長押しする
- IDE の Upload ボタンをクリックする
- コンソールに
Connecting...が表示される、または転送進行状況の表示が始まったら BOOT ボタンを離す
Web ターミナルで Bluetooth デバイスを列挙できない
- 症状:「Find Device」をクリックしても、Bluetooth デバイス一覧が空のまま
- トラブルシューティング:
Web Bluetooth APIをサポートするブラウザを使用しているか確認する- Windows ユーザー:OS バージョンが少なくとも Win10(1703 以降)であることを確認する
- macOS ユーザー:システムの「プライバシーとセキュリティ」設定で、ブラウザに Bluetooth 権限が付与されているか確認する
関節が弱い/姿勢を保持できない
- 症状:ファームウェアは正常に動作し通信も確立しているが、ロボットが荷重を十分に支えられない
- トラブルシューティング:
- 3S バッテリーの充放電能力が十分か確認する
- バス配線が緩んでいないか、逆接続になっていないか確認する
- サーボを交換した場合は、10 個すべてのサーボ ID(0〜9)がプロジェクト定義と一致しているか確認し、ID 競合を避ける