reComputer JetsonでPX4を制御する
reComputer Mini J3010 (Jetson Orin Nano 4G) のような高性能コンパニオンコンピュータと PX4フライトコントローラ を組み合わせることで、自律走行車、ボート、ドローンを含む幅広いインテリジェント無人システムのコアアーキテクチャが構築されます。この強力な組み合わせにより、物流、科学研究、捜索救助、精密農業などの分野で革新的なアプリケーションが実現されます。
このセットアップにより、視覚ナビゲーション、物体追跡、リアルタイム障害物回避などの複雑なオンボードタスクが可能になります。これら2つの「頭脳」間の通信リンクは、システム全体のパフォーマンスと信頼性にとって重要です。

- JetsonをPixhawkに物理的に接続する方法。
- uXRCE-DDS、MAVSDK、MAVROSの長所と短所。
- 3つの通信方法すべてのステップバイステップセットアップ手順。
- 接続を確認し、一般的な問題をトラブルシューティングする方法。
前提条件
開始する前に、以下を確認してください:
- ハードウェア: 下記の「実験環境」表に記載されているすべてのデバイス。
- ソフトウェア: Jetson Pack 6.2とROS 2 Humbleの新規インストール。
- ツール: Jetsonに
gitとpipがインストールされていること。 - 知識: Linuxコマンドライン、ROS 2の概念(ノード、トピック)、QGroundControlでのPX4パラメータの基本的な知識。
システム構成
実験環境
| コンポーネント | デバイス/ソフトウェア | バージョン/モデル |
|---|---|---|
| コンパニオンコンピュータ | デバイス | reComputer Mini J3010 (Jetson Orin Nano 4G) |
| OS | Ubuntu 22.04 (JetPack 6.2) | |
| ROS | ROS 2 Humble | |
| フライトコントローラ | MCU | Pixhawk 4 Mini |
| ファームウェア | PX4 v1.15 | |
| 地上局PC | OS | Ubuntu 22.04 |
| QGC | QGroundControl v5.0以上 |
ハードウェア接続
Jetsonのネイティブ UARTを使用することを強く推奨します。これにより、USBポートを占有しない堅牢な接続が実現できます。
- 配線: 4ピンJST-GHケーブルを使用して、**Pixhawk 4 Miniの
TELEM1ポートをJetson Orin NanoのUART1**ヘッダーに接続します。 - デバイスファイル: このシリアルポートは、JetsonのOSでは
/dev/ttyTHS1に対応します。
Pixhawk 4 Miniのポート/ピン配置の詳細(クリックして展開)
| UART | デバイス | QGCパラメータの説明 | FC上のポートラベル |
|---|---|---|---|
| UART1 | /dev/ttyS0 | GPS1 | GPSモジュール |
| USART2 | /dev/ttyS1 | TELEM1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 | なし |
| UART4 | /dev/ttyS3 | TELEM/SERIAL4 | UART/I2C B |
| USART6 | /dev/ttyS4 | なし | RC IN |
| UART7 | /dev/ttyS5 | なし | デバッグ |
| UART8 | /dev/ttyS6 | なし | 未接続(PX4IOなし) |
TELEM1 / TELEM2 ポート
| ピン | 信号 | 電圧 |
|---|---|---|
| 1(赤) | VCC | +5V |
| 2(黒) | TX(出力) | +3.3V |
| 3(黒) | RX(入力) | +3.3V |
| 4(黒) | CTS(入力) | +3.3V |
| 5(黒) | RTS(出力) | +3.3V |
| 6(黒) | GND | GND |
DSM RC ポート
| ピン | 信号 | 電圧 |
|---|---|---|
| 1(なし) | VDD_5V_SBUS_RC | +5V |
| 2(黄) | SBUS* | +3.3V |
| 3(なし) | RSSI** | +3.3V |
| 4(赤) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(黒) | GND | GND |
UART & I2C B ポート *
| ピン | 信号 | 電圧 |
|---|---|---|
| 1(赤) | VCC | +5V |
| 2(黒) | TX(出力) | +3.3V |
| 3(黒) | RX(入力) | +3.3V |
| 4(黒) | SCL2 | +3.3V |
| 5(黒) | SDA2 | +3.3V |
| 6(黒) | GND | GND |
SBUS RC ポート
| ピン | 信号 | 電圧 |
|---|---|---|
| 1(赤) | VDD_5V_SBUS_RC | +5V |
| 2(黄) | SBUS* | +3.3V |
| 3(なし) | RSSI** | +3.3V |
| 4(なし) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(黒) | GND | GND |
脚注:
- (UART & I2C B ポート): シリアル通信やI2Cをサポートするセンサーを接続するための予備ポート。例:2基目のGPSモジュールなど。
- (SBUS信号): SBUSまたはDSM/Spektrumレシーバーの信号線をここに接続します。
- (RSSI信号): RC信号強度情報をオートパイロットへ送信します。
すべてのシリアルコマンドで sudo を使うのを避けるには、ユーザーを dialout グループに追加する必要があります。これは一度だけ行う重要な設定です。
sudo usermod -a -G dialout $USER
この変更を反映させるには、Jetsonを再起動する必要があります。
方法の選び方:比較
作業に入る前に、トレードオフを理解しましょう。最適な選択はプロジェクトの目的によって決まります。
| 特徴 | uXRCE-DDS(ROS 2ネイティブ)🚀 | MAVSDK(高レベルAPI)🐍 | MAVROS(ROSブリッジ)🌉 |
|---|---|---|---|
| アーキテクチャ | PX4とROS 2がDDSデータ空間を共有し、ネイティブ通信を実現。 | ラッパー付きのスタンドアロンC++ライブラリで高レベルAPIを提供。 | MAVLinkプロトコルをROSのトピック/サービスへ変換するブリッジ/ゲートウェイ。 |
| 性能 | 最高。ゼロコピーで最小レイテンシ。 | 高い。API呼び出しが効率的なMAVLinkメッセージを直接生成。 | 良好。MAVLink→ROS変換レイヤ由来の軽微なオーバーヘッドあり。 |
| 使いやすさ | 中程度。Agentとpx4_msgsのビルドが必要。 | 最も簡単。関数ベースで直感的。素早いプロトタイピングに最適。 | 学習コストは高いが、ROSエコシステムとの統合が最も深い。 |
| 柔軟性 | 優秀。PX4内部(uORB)の全トピックへ直接アクセス可能。 | 限定的。離陸やウェイポイントなど一般的操作は可、rawデータは不可。 | 優秀。ほぼ全てのMAVLinkメッセージ/パラメータ/サービスへアクセス可。 |
| ROS統合 | ROS 2ネイティブ。公式で将来性のある方法。 | ROSに非依存。どのプロジェクトでも利用可、ROSノードで包むのも容易。 | ROS中心。ROS 1のデファクトで、ROS 2でも広く利用。 |
| ユースケース | 低レベルデータへのアクセスが必要な性能重視のROS 2案件。 | タスクレベルのスクリプト、試作、非ROS案件、教育用途。 | Nav2やMoveItなどと統合する複雑なROSシステム。 |
方法1:uXRCE-DDS(ROS 2ネイティブ統合)
PX4の内部メッセージング uORB をROS 2ネットワークへ直接ブリッジし、オーバーヘッド無しの通信を実現するPX4公式の解決策です。
ステップ1:Micro XRCE-DDS Agentのコンパイル
AgentはJetson上で動作する軽量プログラムで、フライトコントローラのシリアル接続とROS 2ネットワークの仲介役を担います。
# 1. Agentリポジトリの特定バージョンをクローン
cd ~
git clone -b v2.4.2 https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent
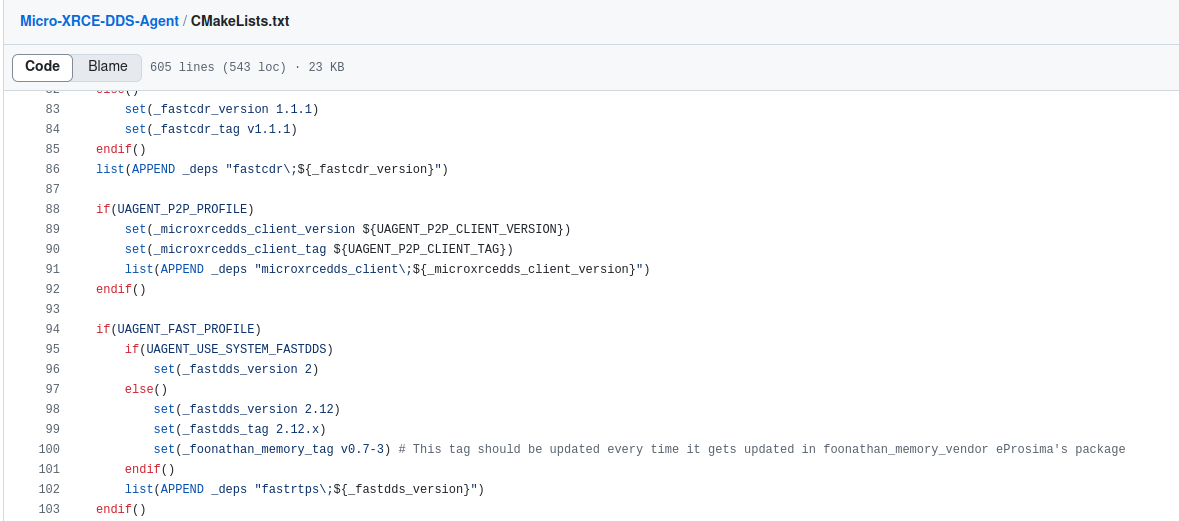
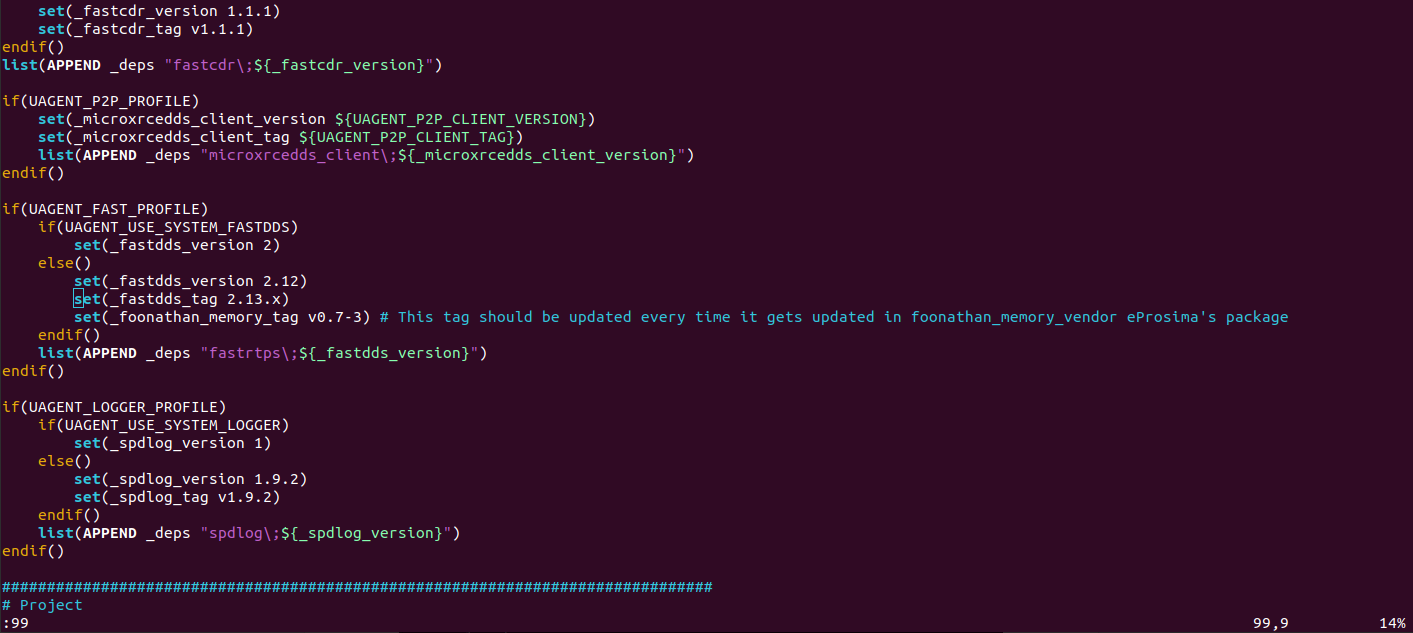
# 2. 重要:Fast-DDS依存バージョンをパッチ
# fastddsのv2.12.xタグはベンダにより削除されたため、動作する版へ更新
sed -i 's/v2.12.x/v2.13.x/g' SuperBuild.cmake
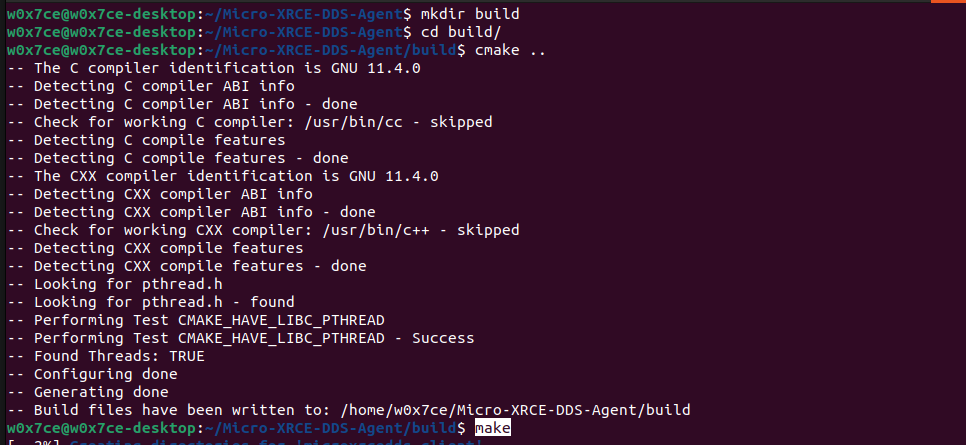
# 3. Agentをビルドしてインストール
mkdir build && cd build
cmake ..
make
sudo make install # MicroXRCEAgentをグローバルにインストール
ステップ2: px4_msgs ROS 2パッケージをビルドする
ROS 2がPX4のトピックを理解できるよう、メッセージ定義をビルドします。
# 1. ROS 2ワークスペースを作成
mkdir -p ~/px4_ros_ws/src
cd ~/px4_ros_ws/src
# 2. 必要なリポジトリをクローン
git clone https://github.com/PX4/px4_msgs.git
git clone https://github.com/PX4/px4_ros_com.git # サンプルを含む
# 3. 利用中のファームウェアに一致するブランチへチェックアウト
cd px4_msgs
git checkout release/1.15
# 4. ワークスペースをビルド
cd ~/px4_ros_ws
source /opt/ros/humble/setup.bash
colcon build
px4_msgs のバージョンは、PX4 ファームウェアのバージョンと必ず一致している必要があります。これは互換性のために非常に重要です。
さらに、PX4 ファームウェア v1.14 以降で標準となった uXRCE-DDS による完全なネイティブ ROS 2 サポートを利用するには、2MB のフラッシュメモリを搭載したフライトコントローラ(本ガイドで使用している Pixhawk 4 Mini など)が必要です。
古いクラシックハードウェア、たとえばよく使われる Pixhawk 2.4.8(およびその他の FMUv2 ベースのボード)はフラッシュメモリが 1MB しかなく、この方法に必要な標準のプリビルドファームウェアを実行できません。理論的にはカスタムで削減版ファームウェアを作ることも可能ですが、非常に複雑です。
もし Pixhawk 2.4.8 やその他 1MB フラッシュのボードを使用している場合、この方法はスキップし、代わりに 方法 2 (MAVSDK) または 方法 3 (MAVROS) を使用することを強くお勧めします。これらは MAVLink プロトコルを使用しており、あなたのハードウェアで完全にサポートされています。
px4_msgs のブランチは、PX4 ファームウェアのバージョンと一致している必要があります。これによりメッセージ定義の互換性が保証されます。

ステップ3:PX4ファームウェアの設定
QGroundControlに接続し、以下のパラメータを設定します:
UXRCE_DDS_CFG:TELEM1に設定(当該ポートでXRCE-DDSクライアントを有効化)。SER_TEL1_BAUD:921600 8N1に設定。MAV_1_CONFIG:Disabledに設定(同一ポートでのMAVLink競合を防止)。- パラメータを保存し、フライトコントローラを再起動。
ステップ4:起動と確認
-
JetsonでAgentを起動(1つ目のターミナル):
ターミナル1:Agentの実行MicroXRCEAgent serial --dev /dev/ttyTHS1 -b 921600 -
ROS 2トピックを確認(新しいターミナル):
ターミナル2:トピック確認# 各ターミナルでワークスペースを読み込む
source ~/px4_ros_ws/install/setup.bash
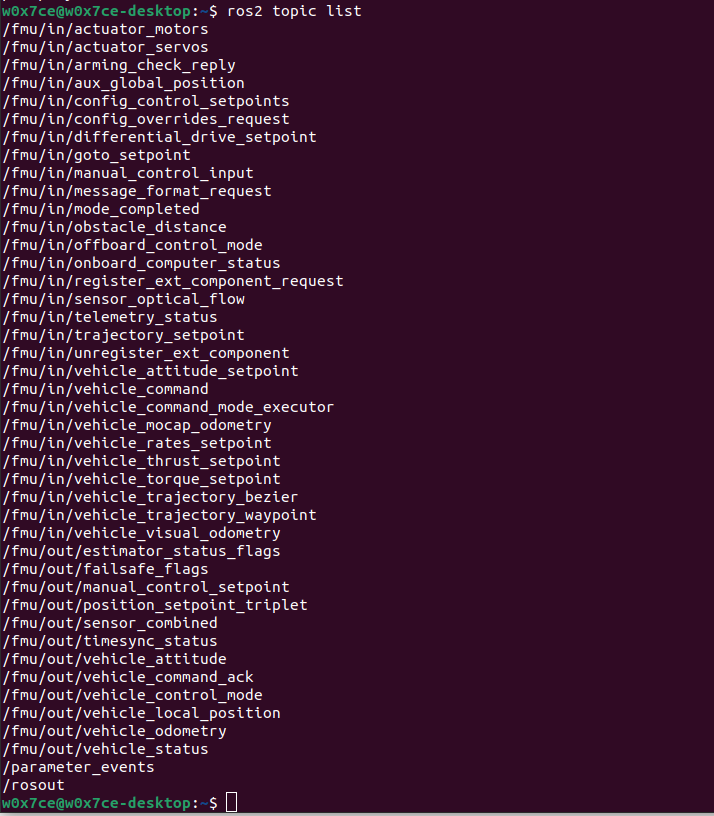
# /fmu/で始まるトピックが列挙されるはず
ros2 topic list | grep /fmu/
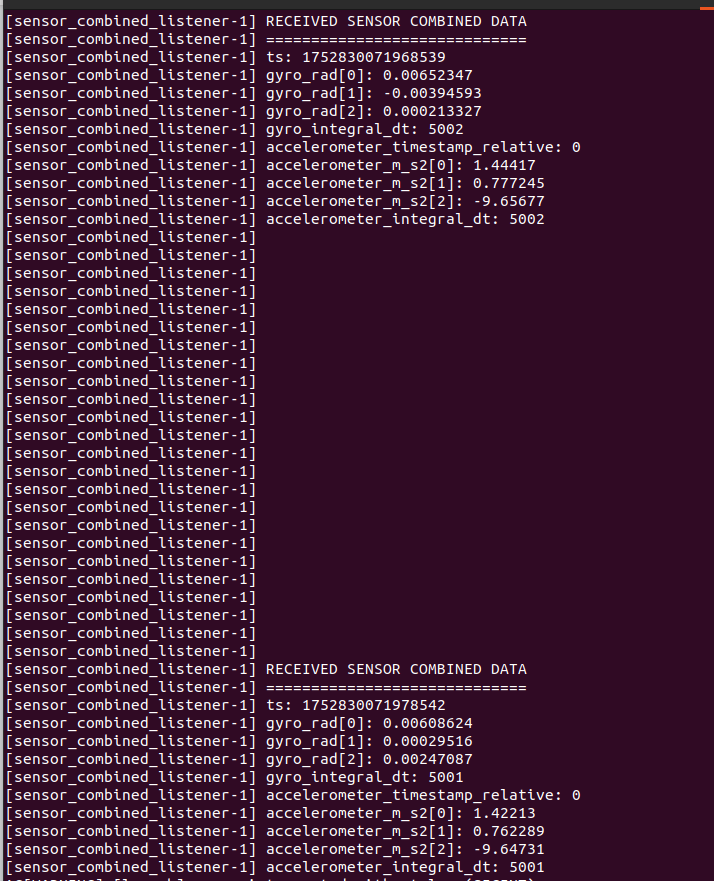
# トピックをエコーしてFCUからのライブデータを確認
ros2 topic echo /fmu/out/vehicle_odometry
方式2:MAVSDK(高レベルAPI)
MAVSDKはMAVLinkの複雑さを抽象化し、プログラムによるドローン制御のためのシンプルでモダンなAPIを提供します。高レベルのミッションスクリプトに最適です。
ステップ1:PX4ファームウェアの設定
QGroundControlで、ポート設定をDDSからMAVLinkモードに戻します。
UXRCE_DDS_CFG:Disabledに戻す。MAV_1_CONFIG:TELEM 1に設定(ポートをMAVLinkに割り当て)。MAV_1_MODE:Onboardに設定(コンパニオン用リンク)。SER_TEL1_BAUD:921600 8N1が継続していることを確認。- 保存してFCを再起動。
ステップ2:MAVSDK-Pythonのインストール
pip3 install mavsdk
ステップ3: 制御スクリプトの作成と実行
次のPythonは接続後、(例では接続確認まで。離陸・着陸は各自で拡張可)メッセージを表示します。
import asyncio
from mavsdk import System
async def run():
# ドローンオブジェクトを作成し、フライトコントローラに接続
drone = System()
await drone.connect(system_address="serial:///dev/ttyTHS1:921600")
print("ドローンの接続を待機中...")
# 接続状態の更新を返す非同期ジェネレータ
async for state in drone.core.connection_state():
if state.is_connected:
print("--> ドローンを検出しました!")
break
if __name__ == "__main__":
# asyncioイベントループを実行
asyncio.run(run())
ターミナルから実行:python3 takeoff_and_land.py
方法3:MAVROS(強力なROSブリッジ)
MAVROSは実績あるMAVLink→ROSゲートウェイで、複雑なROSベースのシステムに包括的機能と高い安定性を提供します。
ステップ1:PX4ファームウェアの設定
MAVROS向けのPX4設定はMAVSDKと同一です。TELEM1がOnboardモードでMAVLink用に設定されていることを確認してください。
ステップ2:MAVROSと依存関係のインストール
sudo apt update
sudo apt install ros-humble-mavros ros-humble-mavros-msgs
MAVROS は座標変換のために地理データセットを必要とします。データセットがないと、起動時にクラッシュする一般的な原因となります。このスクリプトはそれをダウンロードしてインストールします。
sudo bash /opt/ros/humble/lib/mavros/install_geographiclib_datasets.sh
ステップ3: 起動と検証
-
MAVROSノードを起動:
ターミナル1:MAVROSを起動source /opt/ros/humble/setup.bash
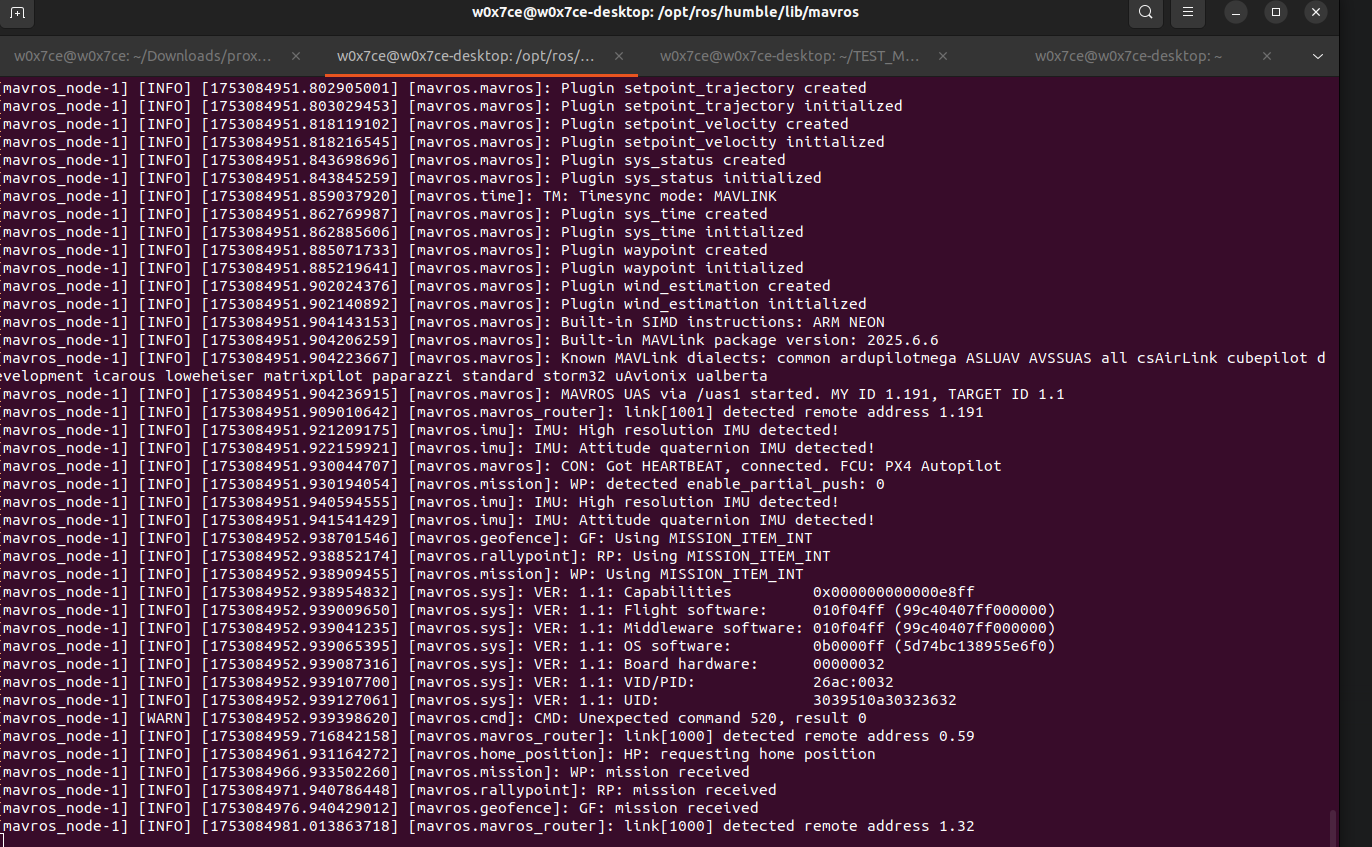
# パラメータでFCU接続URLを指定してmavrosを起動
ros2 launch mavros px4.launch fcu_url:="serial:///dev/ttyTHS1:921600" -
接続を検証:
新しいターミナルでMAVROSのステートトピックをエコー。
ターミナル2:接続確認ros2 topic echo /mavros/state出力を確認し、
connectedフィールドがtrueになればPX4と正常に通信しています。

よくある問題のトラブルシューティング
問題が発生した場合は、まずこちらを確認してください。
- シリアルポートで「Permission Denied」: ユーザーを
dialoutグループへ追加&再起動を忘れている可能性。上記「ハードウェア接続」を参照。 /dev/ttyTHS1で「No such file or directory」: 物理配線を再確認。FCの電源は入っていますか?ls /dev/ttyTHS*でデバイス名を確認。- MAVROSが起動時にクラッシュ:
install_geographiclib_dataset.shを未実行の可能性。方法3のコマンドを実行。 colcon buildが失敗: まずsource /opt/ros/humble/setup.bashを実行してROS 2環境を読み込む。依存関係が複雑な場合はrosdep install --from-paths src --ignore-src -r -yを検討。
最後に
これで、Jetson OrinとPX4フライトコントローラ間の通信を実現する3つの強力な方法を理解できました。最適解はプロジェクトのアーキテクチャ、要求性能、開発スピードによって異なります。トレードオフを理解し、堅牢な基盤を構築しましょう。
ハッピーフライング!🚁
参考資料
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます。できるだけスムーズにご利用いただけるよう、複数のサポート窓口をご用意しています。