reComputerでROSを使用して複数のCSIカメラを使用する方法
はじめに
このチュートリアルでは、reComputer J30/J40シリーズデバイス上でROSを通じて複数のCSIカメラの画像データを読み取り、画像トピックを公開してRVIZ可視化インターフェースに表示する方法について、ステップバイステップのガイドを提供します。

前提条件
-
reComputer J30/40シリーズ:提供されたチュートリアルに従ってJetPack 5.xシステムのインストールとROS Noetic環境のセットアップが完了していることを確認してください。
-
サポートされているカメラは以下の通りです:
-
IMX219カメラ
- Raspberry Pi Camera V2
- IMX219-130 8MP Camera with 130° FOV
- IMX219-160 8MP Camera with 160° FOV
- IMX219-200 8MP Camera with 200° FOV
- IMX219-77 8MP Camera with 77° FOV
- IMX219 M12/CS mount CMOS Camera Module
- IMX219-83 8MP 3D Stereo Camera Module
- IMX219-77IR 8MP IR Night Vision Camera with 77° FOV
- IMX219-160IR 8MP Camera with 160° FOV
- IMX219 M12/CS mount CMOS Camera Module
-
IMX477カメラ
-
はじめに
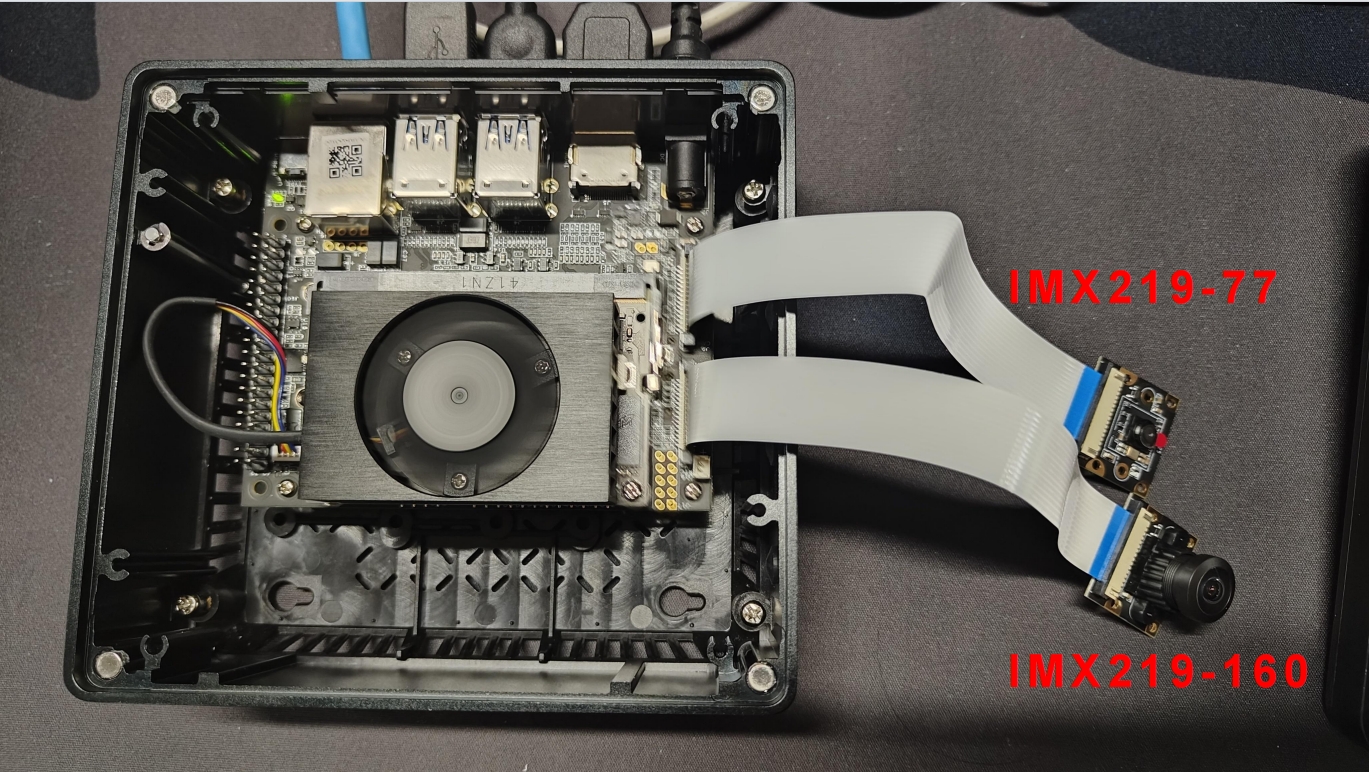
カメラの接続
このチュートリアルに従ってCSIカメラの接続とテストを完了し、システムにROSがすでにインストールされていることを確認してください。
インストール
-
ステップ1: reComputer上でターミナルを開き、ワークスペース用のディレクトリを作成します:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src -
ステップ2: 必要なROSパッケージをクローンします:
git clone https://github.com/ZhuYaoHui1998/csi_camera_reader.git -
ステップ3: ワークスペースをビルドします:
cd ~/catkin_ws/
catkin_make -
ステップ4: 環境を更新するために、再度セットアップファイルをソースします:
source devel/setup.bash
使用方法
-
1つのカメラストリームをROSトピック /csi_cam_0/image_raw に公開するには、ターミナルで次のコマンドを使用します:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=0 -
sensor_idを1に変更してインターフェースに合わせることもできます:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=1 -
2つのCSIカメラを同時に開いてROSにトピックを公開したい場合は、次のコマンドを実行できます:
roslaunch csi_camera_reader dual_camera.launchターミナルで「rostopic list」コマンドを入力すると、カメラによって公開された画像トピックを確認できます。

RVIZ可視化ツールを使用して画像トピックを購読し、視覚情報を表示することもできます。

技術サポートと製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちの製品での体験ができるだけスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。