Damiao 43シリーズモーター入門ガイド
この記事では、Damiao 43シリーズモーターの使い始め方と、reComputer Mini Jetson OrinでC++とPythonを使用する方法を紹介します。

仕様
以下は、すべてのモーターモデルのパラメータを記載した完成版の表です:
| モーターモデル | 定格トルク (Nm) | ピークトルク (Nm) | 無負荷速度 (rpm) | 定格速度 (rpm) | 減速比 | サイズ 直径*高さ (mm) | 重量 (g) | 供給電圧 (V) | 推奨電圧範囲 (V) | 定格相電流 (A) | ピーク相電流 (A) | 定格電力 (W) | 極対数 | 通信方式 | エンコーダタイプ | 設置 | 相抵抗 (Ω) | 相インダクタンス (uH) | 磁束鎖交 (Wb) | 回転慣性 (Kg*m²) | トルク定数 (Nm/A) | ドライブ最大電流 (A) | 速度ループKP | デフォルトPMAX (rad) | デフォルトVMAX (rad/s) | デフォルトTMAX (Nm) | 速度定数 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J4310-2EC V1.1 | 3 | 7 | 200 | 120 | 10 | 57 * 46 | ~300 | 24 | 15-32 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4310-2EC V1.1(48V) | 3 | 7 | 400 | 120 | 10 | 57 * 46 | ~300 | 48 | 15-52 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4340-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 53.3 | ~362 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 53.3 | ~362 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 56.5 | ~375 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 56.5 | ~375 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | 磁気、デュアル | 内蔵 | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
主な特徴
- CAN BUS & CANFD
- デュアルエンコーダ
- 高トルク密度
- 高精度
- 中空設計
入門ガイド
使用前の環境準備
PCのWindowsシステム
- Damiaoデバッグツールをダウンロードします。
- USB2CANツールをダウンロードします
回路をPCに接続
CAN通信方式を使用するため、WindowsのホストコンピュータでデバッグするためにUSB-CANインターフェースが追加で必要です。
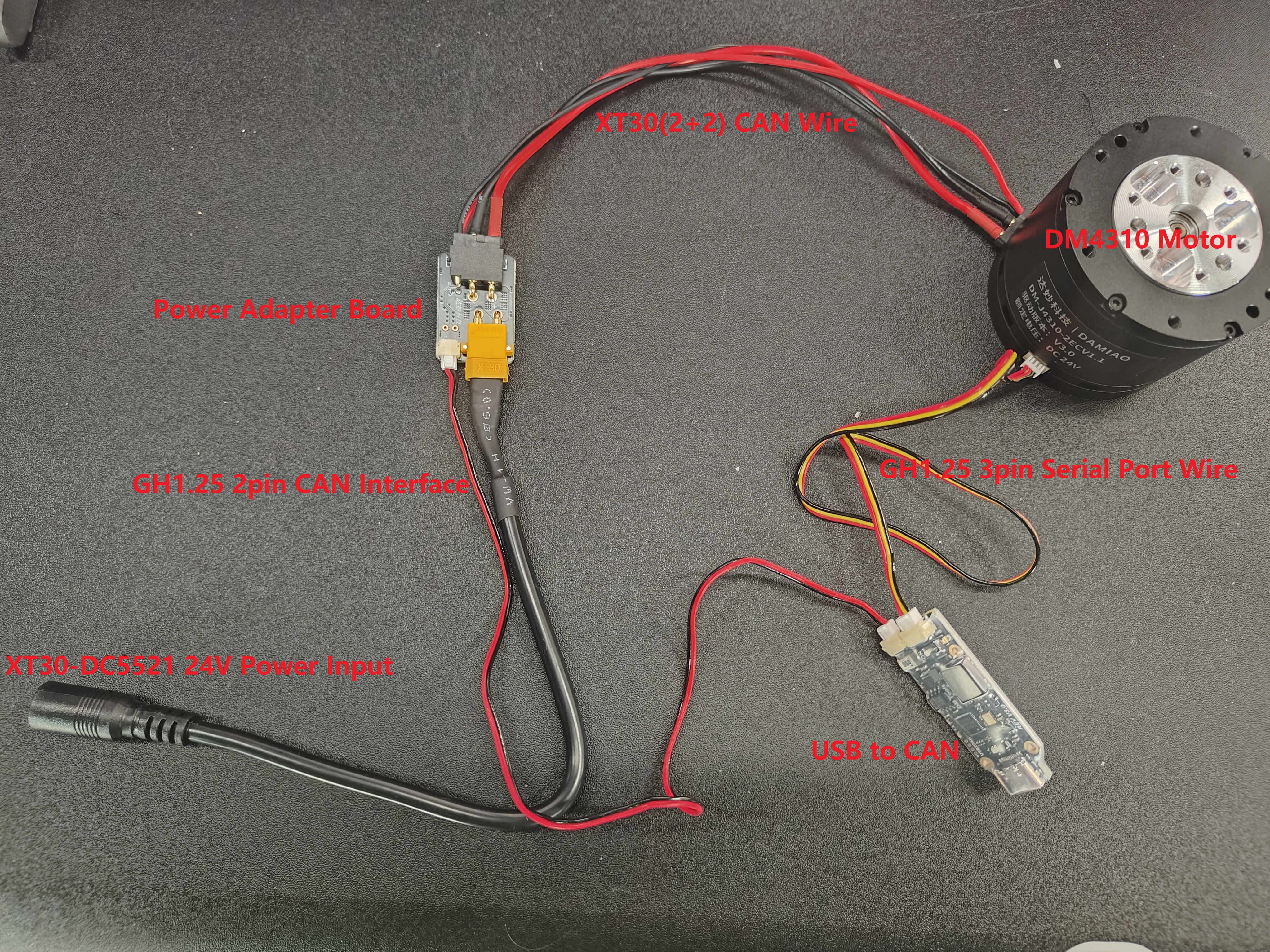
ここでは、モーター用に別途24V電源を提供し、USBをコンピュータに接続する必要があります。
Debugging_Tools_v.1.6.8.8.exeを使用してモーターをテスト
アプリの下部で中国語と英語を切り替えることができます。
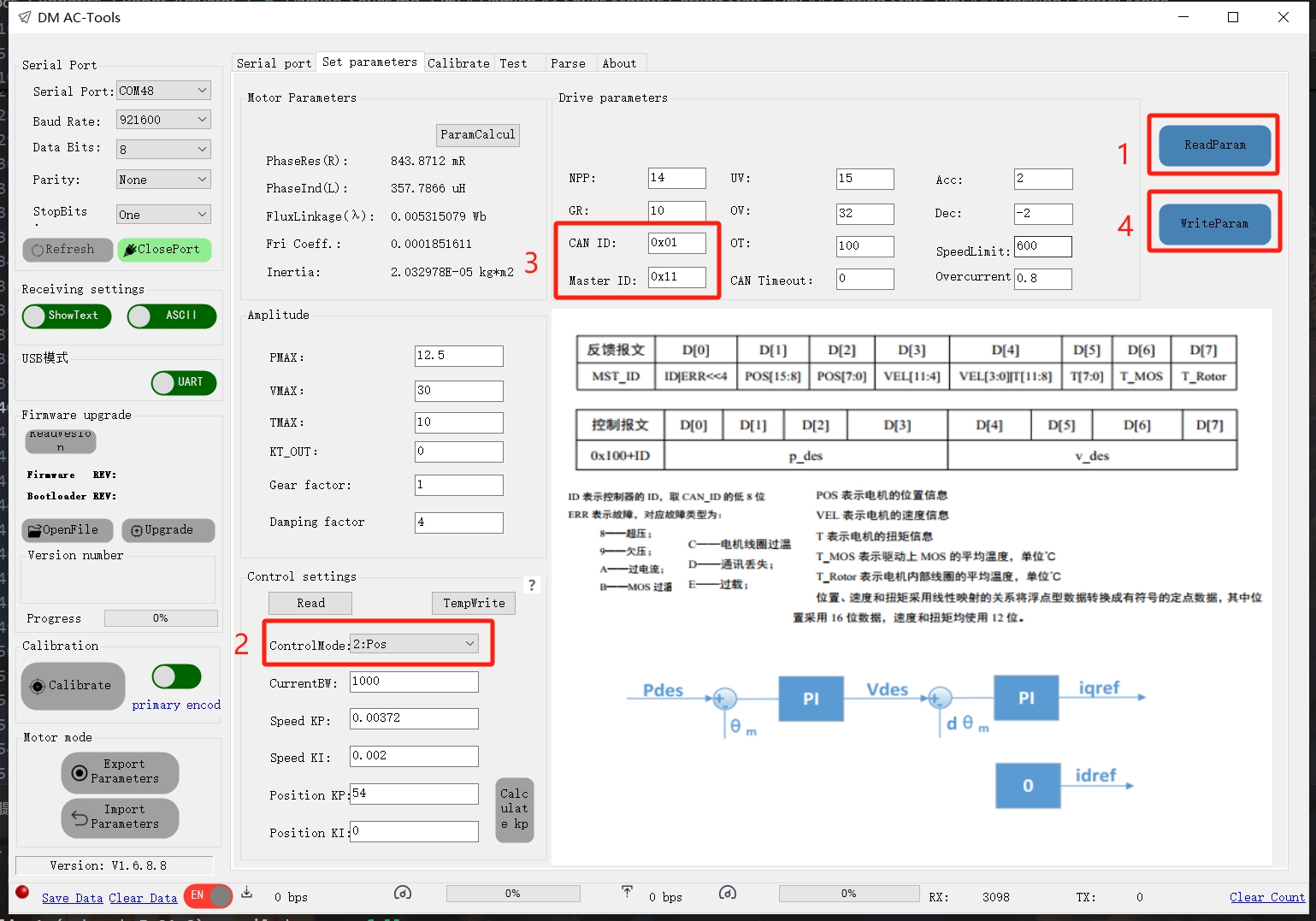
| シリアルポート接続パラメータの設定 | モーターに接続 | パラメータ読み取り | CAN ID設定 | パラメータ書き込み |
|---|---|---|---|---|
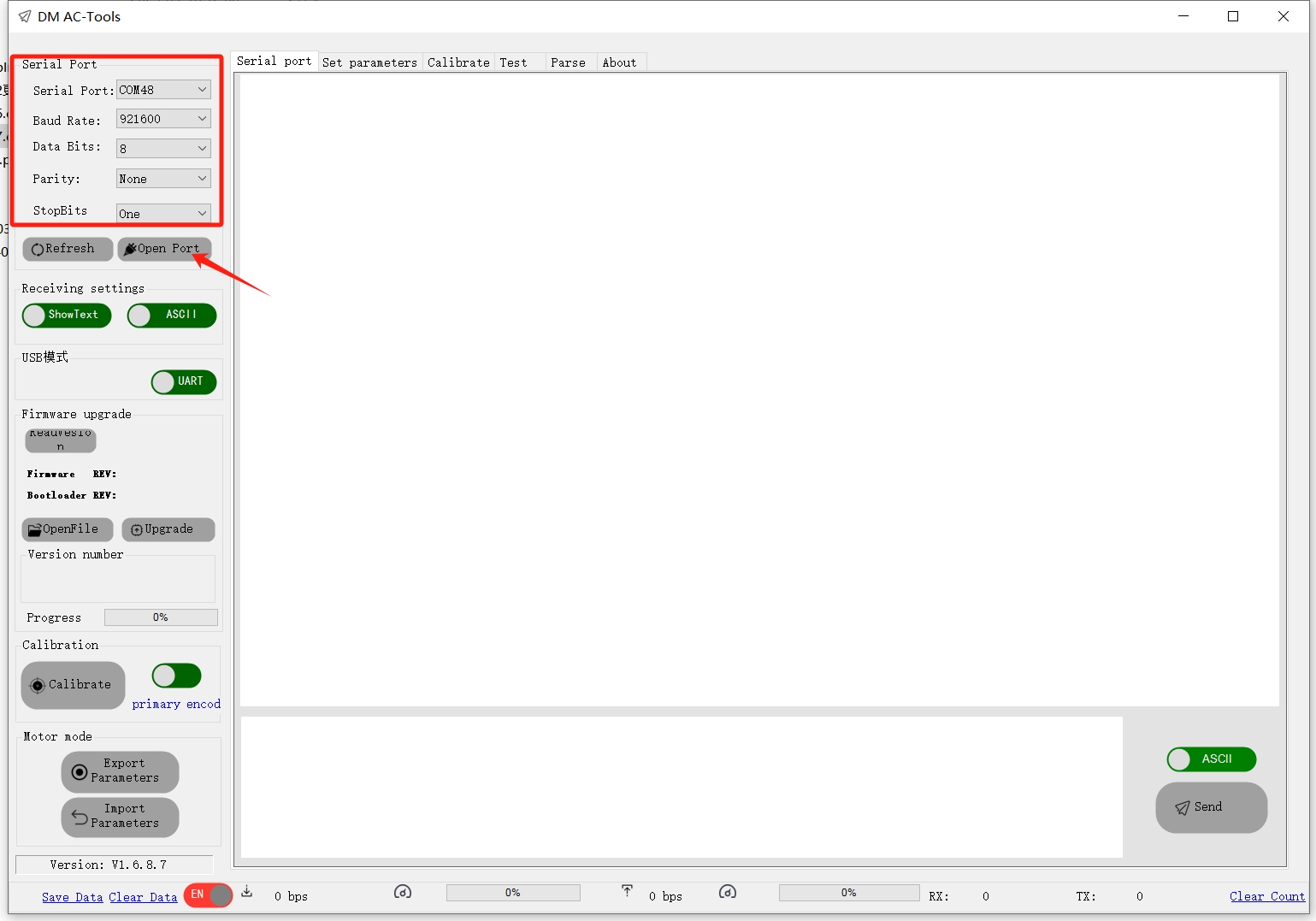 |  |  |  |  |
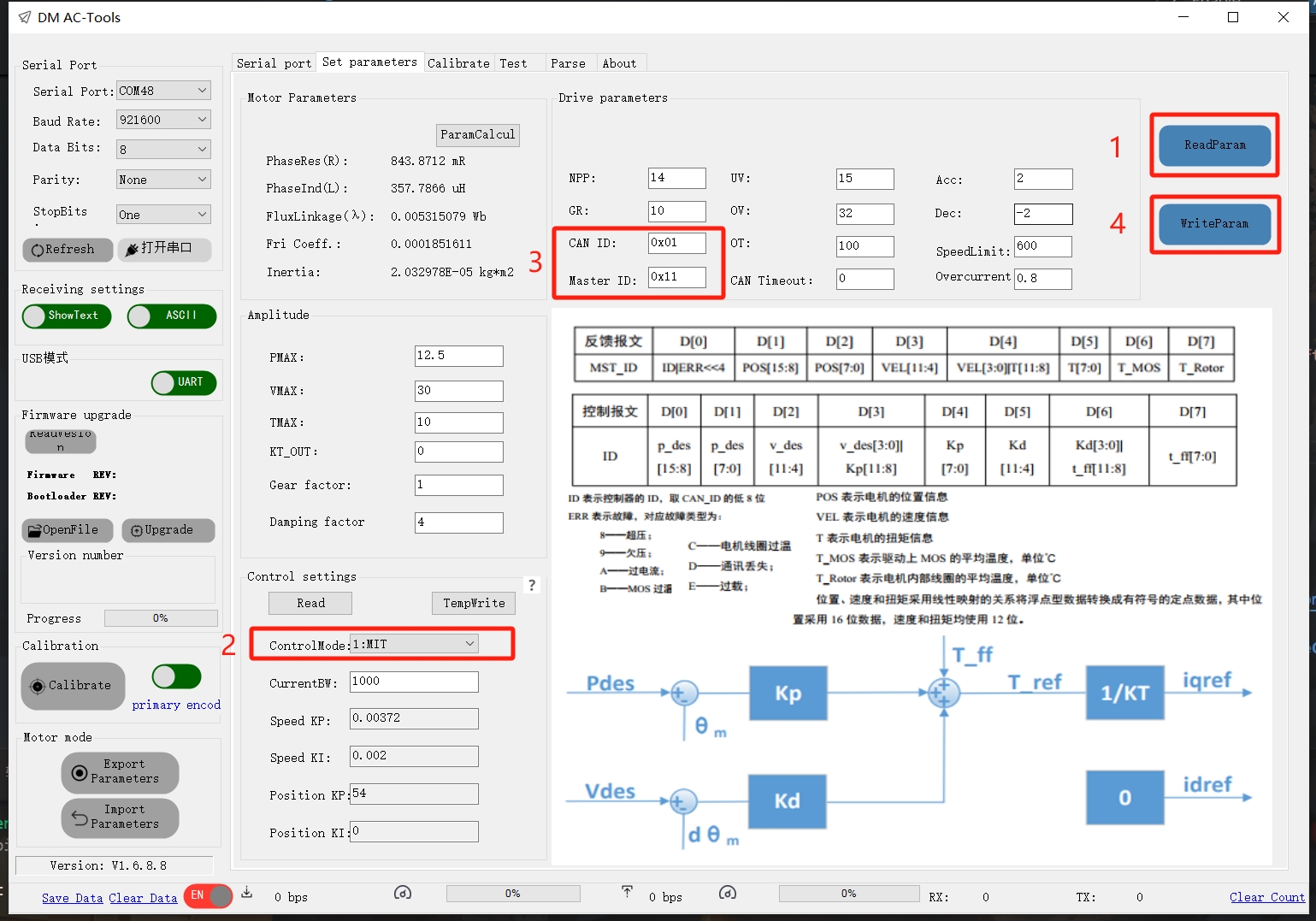
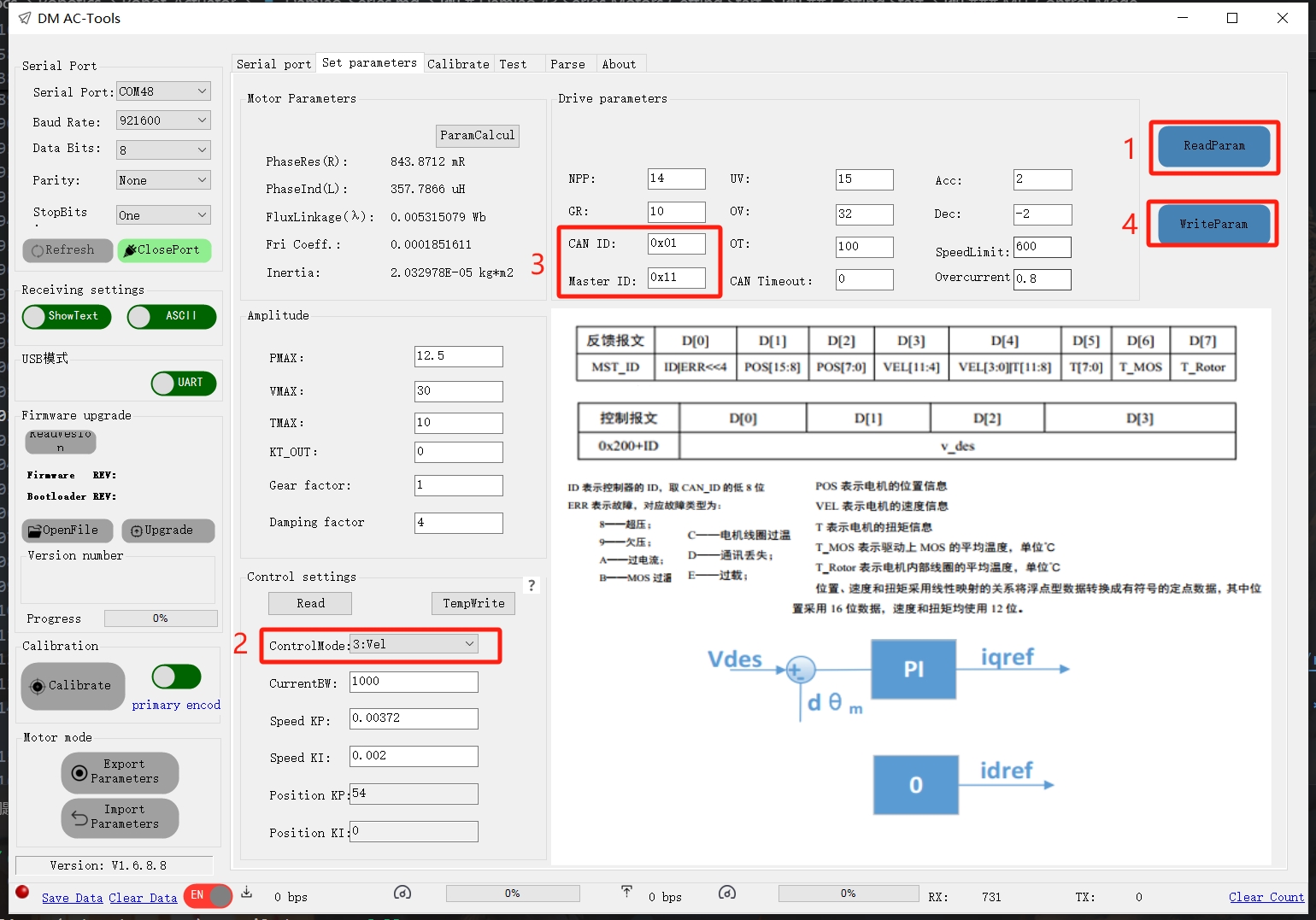
| シリアルポートには、コンピュータが自動認識したポートを使用し、その他の設定はすべてデフォルトのままにします。 | "Open Port"ボタンをクリックすると、ホストコンピュータに自動接続されます。初回接続の場合、ダイアログボックスにモーター情報が表示されます | "Set Parameters"セクションで"Read Param"をクリックすると、モーターの現在の詳細情報と動作モードが表示されます。 | ここで、まずCAN IDを設定してください。 | 設定後、"Write Param"をクリックしてパラメータを更新します。 |
CAN_ID: ドライブがCANコマンドを受信するために使用するフレームID(16進数)。
Master ID: ドライブがフィードバックを送信するために使用するフレームID(16進数)。
Master IDはホストIDです。各モーターに固有のMaster IDを設定することをお勧めします。
良い慣行は、Master IDをCAN_IDより0x10高く設定することです(例:CAN_ID = 0x01の場合、Master ID = 0x11)。
例:
モーター1: CAN_ID = 0x01, Master ID = 0x11
モーター2: CAN_ID = 0x02, Master ID = 0x12
Master IDを0x00に設定しないでください!!!
(1) 基本パラメータ
- NPP: モーターの極対数、キャリブレーションによって自動決定されます。
- UV: 供給電圧がしきい値(最小15V)を下回ると、ドライブは動作を停止します。
- OV: 上限電圧を設定します。ドライブは起動時に供給電圧をチェックし、超過した場合は動作を無効にします(起動時に一度だけチェック)。
- Acc/Dec: 非MITモードで速度変化の割合を制限するために使用されます。
- GR(Gear Ratio): 出力速度/位置に影響し、間接的にトルクフィードバックに影響します。浮動小数点値をサポートします。
- OT: コイル温度しきい値(推奨≤100°C)。これを超えると故障モードがトリガーされます(モーターを無効にしてエラーを報告)。
- CAN_ID: CANコマンドを受信するためのフレームID(16進数)。
- Master ID: ドライブフィードバック用のフレームID(16進数)。ベストプラクティス:
MasterID = CAN_ID + 0x10に設定(例:0x01→0x11)。0x00に設定しないでください。 - CAN Timeout: タイムアウト期間を定義する32ビット整数(単位:50µsサイクル)。この間隔内にCANコマンドが検出されない場合、モーターは保護モードに入ります。
- Speed Limit (速度モードのみ): 減速前の最大速度(単位:rad/s)。
- Overcurrent: 最大相電流制限(パーセンテージ)。
(2) モーターパラメータ
- ドライブによって自動識別されます。ドライブボードを交換する際は再キャリブレーションが必要です。ドライブに永続的に保存されます。
(3) コマンドスケーリング(振幅設定)
- PMAX: MITモードでは、コマンド入力をスケーリングします;他のモードでは、フィードバック出力をスケーリングします。マッピングルールについてはCANプロトコルを参照してください。
- VMAX: PMAXと同じです。
- TMAX: PMAXと同じです。
- KT_OUT: モータートルク定数。モーターパラメータが正確に識別されている場合は0に設定します。
- Gear Ratio Coefficient: ギアのトルク伝達比。
注意: ドライブはMIT通信プロトコル形式を使用します。
(4) 制御設定
- 制御モード:
- MITモード
- 位置-速度モード(台形加減速)
- 速度モード
- Current Bandwidth: 電流ループゲイン(デフォルト:
1000)。 - Speed KP/KI, Position KP/KI: 速度および位置ループのPIDパラメータ。
MIT制御モード
1. MITトルク制御モード:
- Set Parametersセクションで、Read Paramをクリックして現在のモーターパラメータを表示します。
- Control ModeをMIT Modeに設定します。
- 設定されたCAN IDを確認します。
- Write Paramをクリックしてすべての設定を保存します。
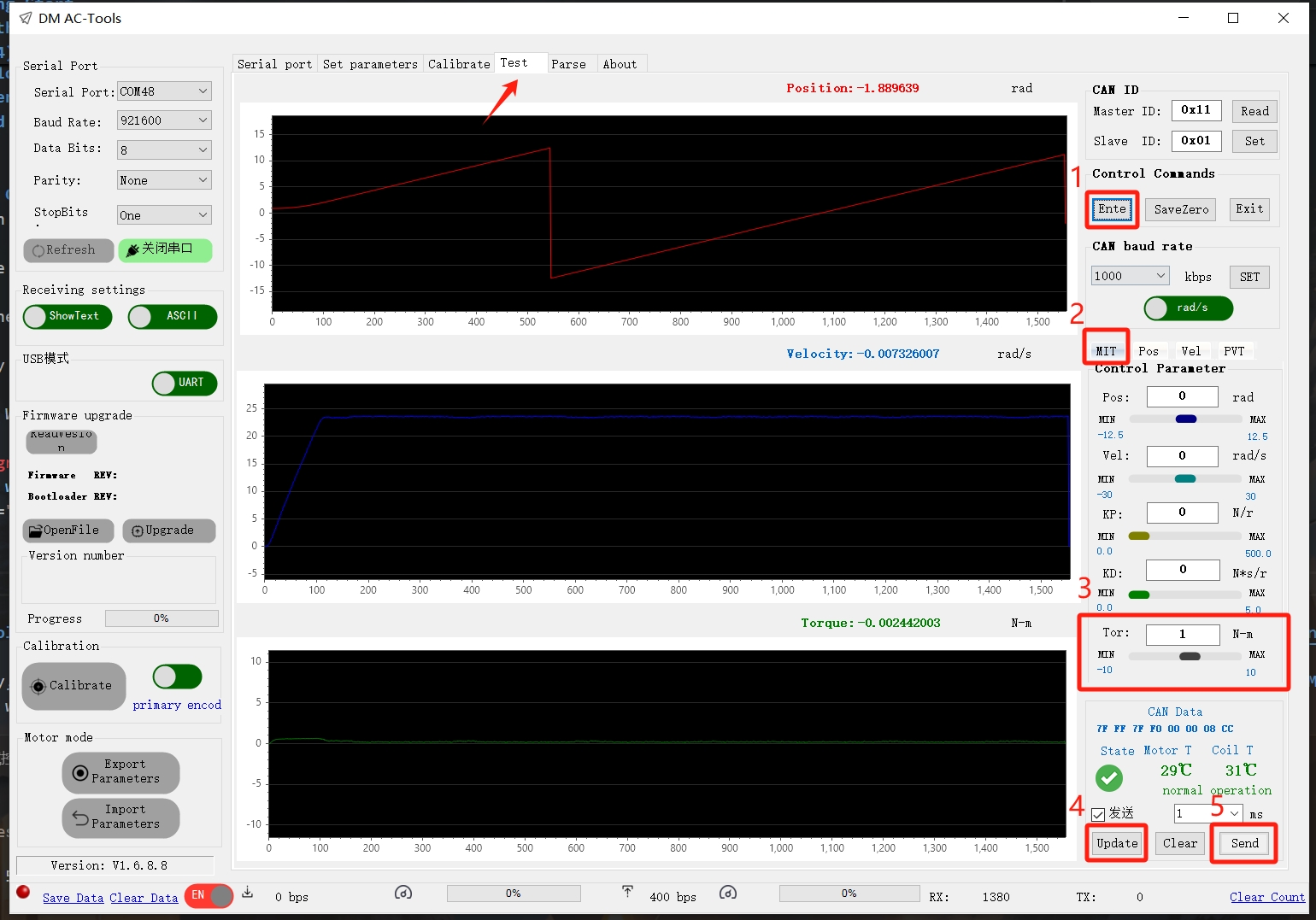
- Testタブで、**"Enable Motor"**ボタン(Ente)をクリックします。
- MIT Controlセクションで:
- Torque (Nm)を1に設定します。
- Update → Sendをクリックします。
モーターが回転を開始します。
CANデータ(16進数形式)をコピーして、シリアルポートデバッグツールを使用してモーターを駆動することもできます。

2. MIT速度制御モード:
- Testタブで、**"Enable Motor"**ボタン(Ente)をクリックします。
- MIT Controlセクションで:
- Vel (rad/s)を5に設定します。
- KD (N*s/r)を1に設定します。
- Update → Sendをクリックします。
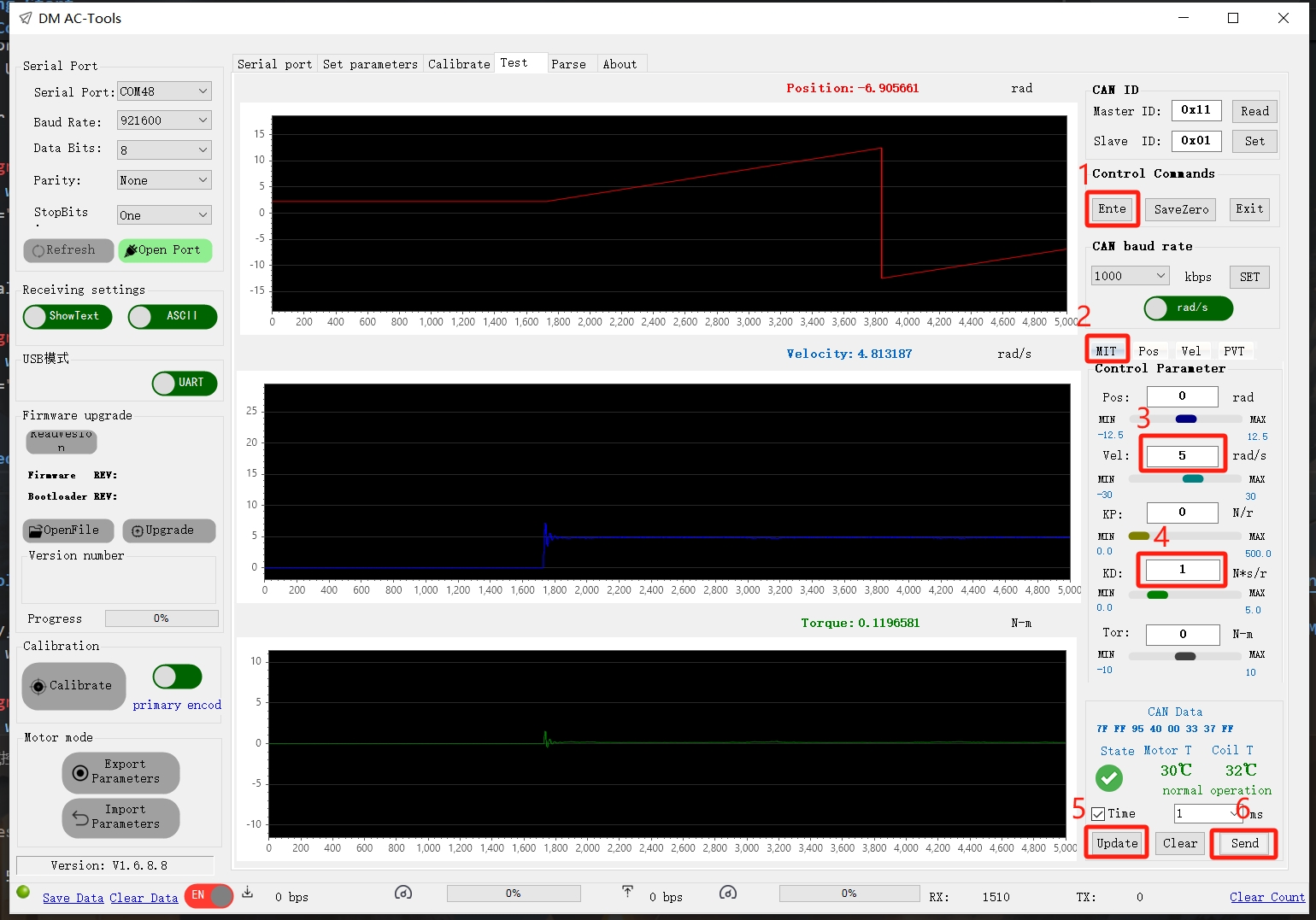
モーターが回転を開始します。CANデータ(16進数形式)をコピーして、シリアルポートデバッグツールを使用してモーターを駆動することもできます。
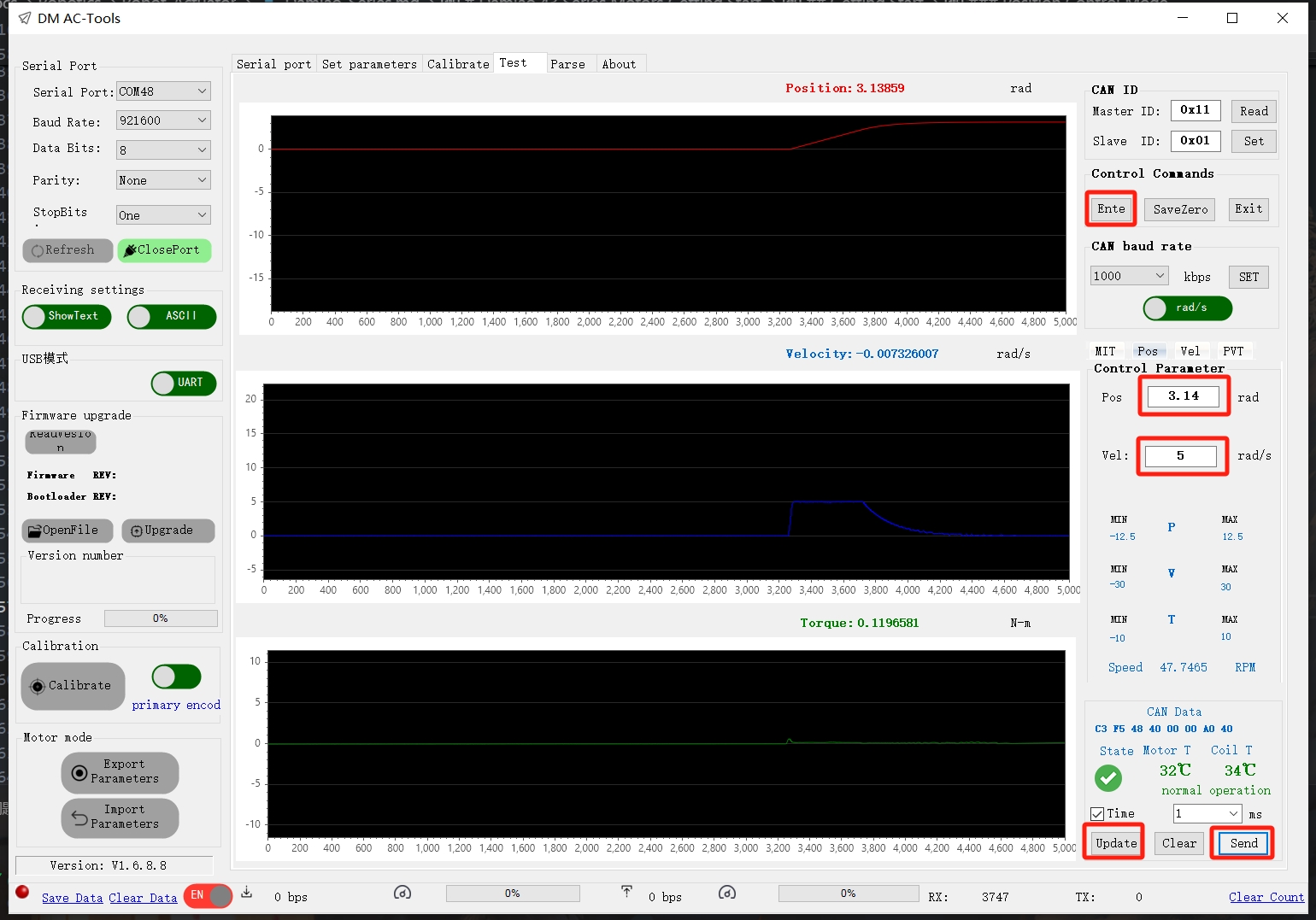
3. MIT位置制御モード:
- Testタブで、**"Enable Motor"**ボタン(Ente)をクリックします。
- **"SaveZero"**を使用して現在の位置をゼロ点として設定できます。
- MIT Controlセクションで:
- Pos (rad)を3.14に設定します。
- KP (N/r)を2に設定します。
- KD (N*s/r)を1に設定します。
- Update → Send をクリックします。
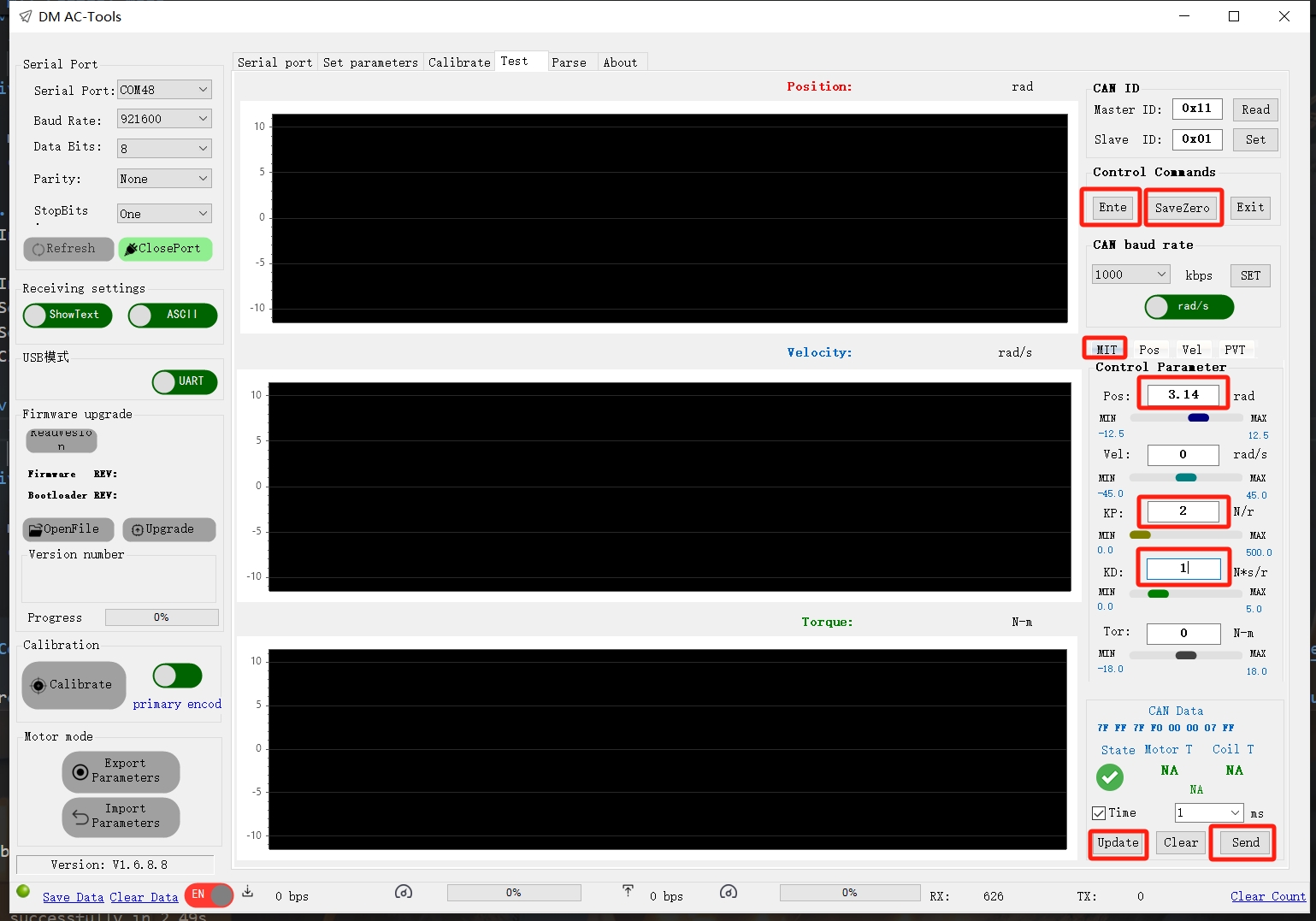
モーターが回転を開始します。CAN データ(16進形式)をコピーして、シリアルポートデバッグツールを使用してモーターを駆動することもできます。
速度制御モード
- Set Parameters セクションで、Read Param をクリックして現在のモーターパラメータを表示します。
- Control Mode を Vel Mode に設定します。
- 設定された CAN ID を確認します。
- Write Param をクリックしてすべての設定を保存します。
- Test タブで、"Enable Motor" ボタン(Ente)をクリックします。
- Vel Control セクションで:
- Vel (rad/s) を 5 に設定します。
- Update → Send をクリックします。
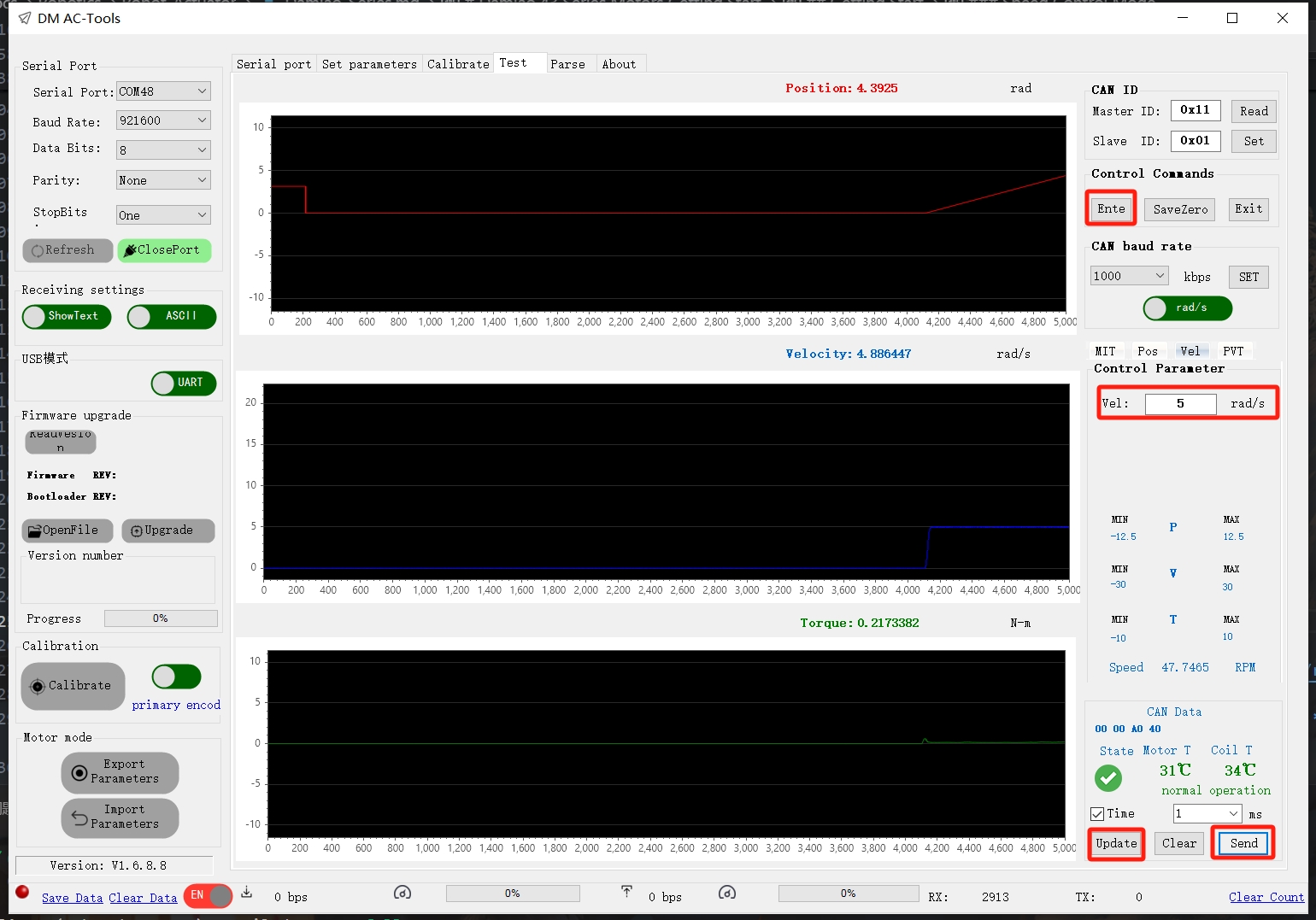
モーターが回転を開始します。CAN データ(16進形式)をコピーして、シリアルポートデバッグツールを使用してモーターを駆動することもできます。
位置制御モード
- Set Parameters セクションで、Read Param をクリックして現在のモーターパラメータを表示します。
- Control Mode を Pos Mode に設定します。
- 設定された CAN ID を確認します。
- Write Param をクリックしてすべての設定を保存します。
- Test タブで、"Enable Motor" ボタン(Ente)をクリックします。
- Pos Control セクションで:
- Pos を 3.14 に設定します。
- Vel (rad/s) を 5 に設定します。
- Update → Send をクリックします。
モーターが回転を開始します。CAN データ(16進形式)をコピーして、シリアルポートデバッグツールを使用してモーターを駆動することもできます。
reComputer Mini Jetson Orin を使用したモーター制御
現在、市場でモーター用の最も一般的な CAN 通信インターフェースは XT30 (2+2) と JST コネクタ を使用しています。私たちの reComputer Mini Jetson Orin と reComputer Robotics デバイスは デュアル XT30 (2+2) ポート と JST ベースの CAN インターフェース を搭載しており、シームレスな互換性を提供します。
reComputer Mini:

reComputer Robotics

CAN の使用に関する詳細については、この wiki を参照してください。
CAN インターフェースの有効化
ステップ1: CAN0 と CAN1 を使用する前に、底面カバーを取り外し、両方の 120Ω 終端抵抗を ON 位置に設定してください。

ステップ2: XT30 (2+2) インターフェースを介してモーターを reComputer Mini CAN0 に直接接続します。
reComputer Mini の CAN インターフェースでは、H/L ピンがモーターの H/L と比較して反転しています。そのため、XT30 2+2 ケーブルハーネスで H/L 接続を逆にする必要があります。

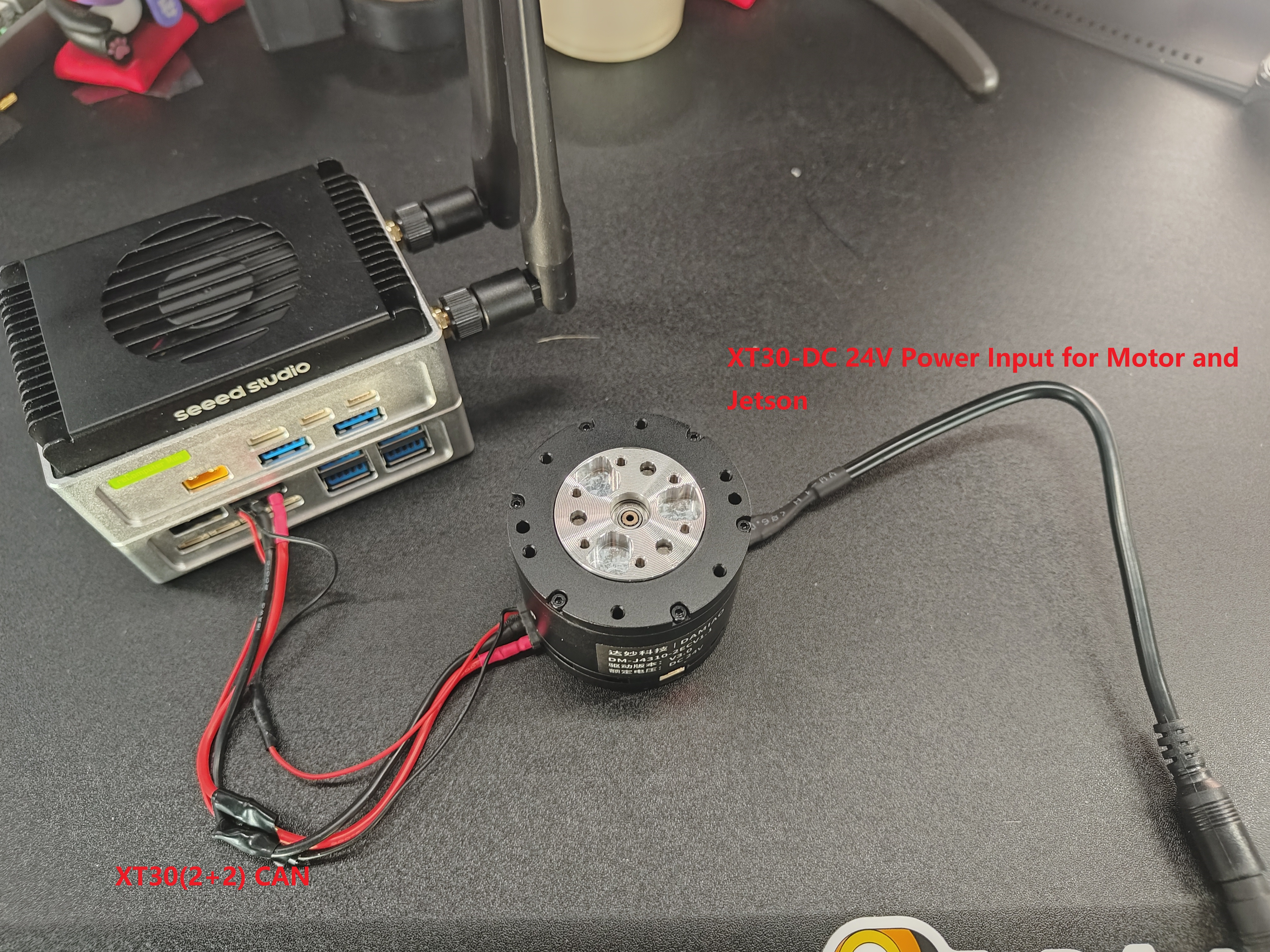
この電源は単一モーターの学習とテスト専用です。複数のモーターの場合は、別途電源ボードを設計し、Jetson の電源をモーター電源から分離して、高電流が Jetson を直接通過することを避けてください。
Jetson CAN 通信の有効化
ターミナルを開き、以下のコマンドを入力して GPIO ピンをハイにプルし、CAN0 を有効化します:
gpioset --mode=wait 0 43=0
JST インターフェース CAN1 を使用している場合は、ピン 106 をハイにプルします。
gpioset --mode=wait 0 106=0
このターミナルを開いたまま、新しいターミナルを起動し、CAN0 を設定します。
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
C++ サンプル
インストールとコンパイル
- CMake のインストール
sudo apt update
sudo apt install cmake
- CAN ツールのインストール
sudo apt install can-utils
- プログラムのダウンロードとコンパイル
- ワークスペースを作成してリポジトリをクローンします:
mkdir -p ~/orin_ws/src
cd ~/orin_ws/src
git clone https://gitee.com/xauter/orin-control.git
- コンパイル:
cd ~/orin_ws/src/orin-control/dm_hw
mkdir build
cd build
cmake ..
make
使用方法
- CAN デバイスの確認
ターミナルを開いて実行します:
ip -brief link | grep can
- プログラムの実行
build フォルダで実行します:
cd ~/orin_ws/src/orin-control/dm_hw/build
./dm_main
モーターが 緑色 に点灯し、正弦波速度 で回転します。
Python を使用した制御
- Python 環境のインストール
pip install python-can numpy
~/damiao/scriptsディレクトリの下に scripts という名前のフォルダを作成して、Python スクリプトを保存します。
mkdir -p ~/damiao/scripts
- damiao_motor.py ファイルの作成
cd ~/damiao/scripts
touch damiao_motor.py
以下のコードを damiao_motor.py にコピーします
damiao_motor.py
## This is a derivative of the following software.
## https://github.com/cmjang/DM_Control_Python/blob/main/DM_CAN.py
import can
from time import sleep, time
import numpy as np
from enum import IntEnum
from struct import unpack
from struct import pack
class Motor:
def __init__(self, MotorType, SlaveID, MasterID):
"""
define Motor object 定义电机对象
:param MotorType: Motor type 电机类型
:param SlaveID: CANID 电机ID
:param MasterID: MasterID 主机ID 建议不要设为0
"""
self.Pd = float(0)
self.Vd = float(0)
self.goal_position = float(0)
self.goal_tau = float(0)
self.state_q = float(0)
self.state_dq = float(0)
self.state_tau = float(0)
self.state_tmos = int(0)
self.state_trotor = int(0)
self.SlaveID = SlaveID
self.MasterID = MasterID
self.MotorType = MotorType
self.isEnable = False
self.NowControlMode = Control_Type.MIT
self.temp_param_dict = {}
def recv_data(self, q: float, dq: float, tau: float, tmos: int, trotor: int):
self.state_q = q
self.state_dq = dq
self.state_tau = tau
self.state_tmos = tmos
self.state_trotor = trotor
def getPosition(self):
"""
get the position of the motor 获取电机位置
:return: the position of the motor 电机位置
"""
return self.state_q
def getVelocity(self):
"""
get the velocity of the motor 获取电机速度
:return: the velocity of the motor 电机速度
"""
return self.state_dq
def getTorque(self):
"""
get the torque of the motor 获取电机力矩
:return: the torque of the motor 电机力矩
"""
return self.state_tau
def getParam(self, RID):
"""
get the parameter of the motor 获取电机内部的参数,需要提前读取
:param RID: DM_variable 电机参数
:return: the parameter of the motor 电机参数
"""
if RID in self.temp_param_dict:
return self.temp_param_dict[RID]
else:
return None
class MotorControl:
#send_data_frame = np.array(
# [0x55, 0xAA, 0x1e, 0x03, 0x01, 0x00, 0x00, 0x00, 0x0a, 0x00, 0x00, 0x00, 0x00, 0, 0, 0, 0, 0x00, 0x08, 0x00,
# 0x00, 0, 0, 0, 0, 0, 0, 0, 0, 0x00], np.uint8)
# 4310 4310_48 4340 4340_48
Limit_Param = [[12.5, 30, 10], [12.5, 50, 10], [12.5, 8, 28], [12.5, 10, 28],
# 6006 8006 8009 10010L 10010
[12.5, 45, 20], [12.5, 45, 40], [12.5, 45, 54], [12.5, 25, 200], [12.5, 20, 200],
# H3510 DMG62150 DMH6220
[12.5 , 280 , 1],[12.5 , 45 , 10],[12.5 , 45 , 10]]
def __init__(self, channel: str, bitrate: int = 1000000):
"""
define MotorControl object 定义电机控制对象
:param serial_device: serial object 串口对象
"""
#self.serial_ = serial_device
self.motors_map = dict()
self.data_save = bytes() # save data
#if self.serial_.is_open: # open the serial port
# print("Serial port is open")
# serial_device.close()
#self.serial_.open()
self.canbus = can.interface.Bus(channel=channel, interface='socketcan', bitrate=bitrate)
#print("can is open")
def controlMIT(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float):
"""
MIT Control Mode Function 达妙电机MIT控制模式函数
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:return: None
"""
if DM_Motor.SlaveID not in self.motors_map:
print("controlMIT ERROR : Motor ID not found")
return
kp_uint = float_to_uint(kp, 0, 500, 12)
kd_uint = float_to_uint(kd, 0, 5, 12)
MotorType = DM_Motor.MotorType
Q_MAX = self.Limit_Param[MotorType][0]
DQ_MAX = self.Limit_Param[MotorType][1]
TAU_MAX = self.Limit_Param[MotorType][2]
q_uint = float_to_uint(q, -Q_MAX, Q_MAX, 16)
dq_uint = float_to_uint(dq, -DQ_MAX, DQ_MAX, 12)
tau_uint = float_to_uint(tau, -TAU_MAX, TAU_MAX, 12)
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
data_buf[0] = (q_uint >> 8) & 0xff
data_buf[1] = q_uint & 0xff
data_buf[2] = dq_uint >> 4
data_buf[3] = ((dq_uint & 0xf) << 4) | ((kp_uint >> 8) & 0xf)
data_buf[4] = kp_uint & 0xff
data_buf[5] = kd_uint >> 4
data_buf[6] = ((kd_uint & 0xf) << 4) | ((tau_uint >> 8) & 0xf)
data_buf[7] = tau_uint & 0xff
self.__send_data(DM_Motor.SlaveID, data_buf)
self.recv() # receive the data from serial port
def control_delay(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float, delay: float):
"""
MIT Control Mode Function with delay 达妙电机MIT控制模式函数带延迟
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:param delay: delay time 延迟时间 单位秒
"""
self.controlMIT(DM_Motor, kp, kd, q, dq, tau)
sleep(delay)
def control_Pos_Vel(self, Motor, P_desired: float, V_desired: float):
"""
control the motor in position and velocity control mode 电机位置速度控制模式
:param Motor: Motor object 电机对象
:param P_desired: desired position 期望位置
:param V_desired: desired velocity 期望速度
:return: None
"""
if Motor.SlaveID not in self.motors_map:
print("Control Pos_Vel Error : Motor ID not found")
return
motorid = 0x100 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
P_desired_uint8s = float_to_uint8s(P_desired)
V_desired_uint8s = float_to_uint8s(V_desired)
data_buf[0:4] = P_desired_uint8s
data_buf[4:8] = V_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_Vel(self, Motor, Vel_desired):
"""
control the motor in velocity control mode 电机速度控制模式
:param Motor: Motor object 电机对象
:param Vel_desired: desired velocity 期望速度
"""
if Motor.SlaveID not in self.motors_map:
print("control_VEL ERROR : Motor ID not found")
return
motorid = 0x200 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Vel_desired_uint8s = float_to_uint8s(Vel_desired)
data_buf[0:4] = Vel_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_pos_force(self, Motor, Pos_des: float, Vel_des, i_des):
"""
control the motor in EMIT control mode 电机力位混合模式
:param Pos_des: desired position rad 期望位置 单位为rad
:param Vel_des: desired velocity rad/s 期望速度 为放大100倍
:param i_des: desired current rang 0-10000 期望电流标幺值放大10000倍
电流标幺值:实际电流值除以最大电流值,最大电流见上电打印
"""
if Motor.SlaveID not in self.motors_map:
print("control_pos_vel ERROR : Motor ID not found")
return
motorid = 0x300 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Pos_desired_uint8s = float_to_uint8s(Pos_des)
data_buf[0:4] = Pos_desired_uint8s
Vel_uint = np.uint16(Vel_des)
ides_uint = np.uint16(i_des)
data_buf[4] = Vel_uint & 0xff
data_buf[5] = Vel_uint >> 8
data_buf[6] = ides_uint & 0xff
data_buf[7] = ides_uint >> 8
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def enable(self, Motor):
"""
enable motor 使能电机
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFC))
sleep(0.1)
self.recv() # receive the data from serial port
def enable_old(self, Motor ,ControlMode):
"""
enable motor old firmware 使能电机旧版本固件,这个是为了旧版本电机固件的兼容性
可恶的旧版本固件使能需要加上偏移量
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xfc], np.uint8)
enable_id = ((int(ControlMode)-1) << 2) + Motor.SlaveID
self.__send_data(enable_id, data_buf)
sleep(0.1)
self.recv() # receive the data from serial port
def disable(self, Motor):
"""
disable motor 失能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFD))
sleep(0.1)
self.recv() # receive the data from serial port
def set_zero_position(self, Motor):
"""
set the zero position of the motor 设置电机0位
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFE))
sleep(0.1)
self.recv() # receive the data from serial port
def recv(self):
# 把上次没有解析完的剩下的也放进来
# data_recv = b''.join([self.data_save, self.serial_.read_all()])
#data_recv = b''.join([self.data_save, self.canbus.recv()])
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
# data = data_recv.data
# err = data[0] >> 12
# id = data[0] & 0x7f
# pos = (data[1] << 8) + data[2]
# vel = (data[3] << 4) + (data[4] >> 4)
# tau = ((data[4] & 0x0f) << 8) + data[5]
# t_mos = data[6]
# t_rotor = data[7]
# print(hex(id), err, id, pos, vel, tau, goal_tau, t_mos, t_rotor)
# CANID = data_recv.arbitration_id
CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data_recv.data, CANID, CMD)
# 飯田:Debug print
# print(hex(CANID),hex(CMD))
# print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
#return data
def recv_set_param_data(self):
#data_recv = self.serial_.read_all()
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_set_param_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
data = data_recv.data
CANID = data_recv.arbitration_id
# CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data, CANID, CMD)
# 飯田:Debug print
print(hex(CANID),hex(CMD))
print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
def __process_packet(self, data, CANID, CMD):
if CMD == 0x11:
if CANID != 0x00:
if CANID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[CANID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[CANID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
else:
MasterID=data[0] & 0x0f
if MasterID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[MasterID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[MasterID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
def __process_set_param_packet(self, data, CANID, CMD):
if CMD == 0x11 and (data[2] == 0x33 or data[2] == 0x55):
masterid=CANID
slaveId = ((data[1] << 8) | data[0])
if CANID==0x00: #防止有人把MasterID设为0稳一手
masterid=slaveId
if masterid not in self.motors_map:
if slaveId not in self.motors_map:
return
else:
masterid=slaveId
RID = data[3]
# 读取参数得到的数据
if is_in_ranges(RID):
#uint32类型
num = uint8s_to_uint32(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
else:
#float类型
num = uint8s_to_float(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
def addMotor(self, Motor):
"""
add motor to the motor control object 添加电机到电机控制对象
:param Motor: Motor object 电机对象
"""
self.motors_map[Motor.SlaveID] = Motor
if Motor.MasterID != 0:
self.motors_map[Motor.MasterID] = Motor
return True
def __control_cmd(self, Motor, cmd: np.uint8): # 飯田:コマンドは通ります
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, cmd], np.uint8)
self.__send_data(Motor.SlaveID, data_buf)
def __send_data(self, motor_id, data):
"""
send data to the motor 发送数据到电机
:param motor_id:
:param data:
:return:
"""
#self.send_data_frame[13] = motor_id & 0xff
#self.send_data_frame[14] = (motor_id >> 8)& 0xff #id high 8 bits
#self.send_data_frame[21:29] = data
#self.serial_.write(bytes(self.send_data_frame.T))
msg =can.Message(is_extended_id=False,arbitration_id=motor_id,data=data,is_remote_frame = False)
self.canbus.send(msg)
def __read_RID_param(self, Motor, RID): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x33, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
def __write_motor_param(self, Motor, RID, data): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x55, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
if not is_in_ranges(RID):
# data is float
data_buf[4:8] = float_to_uint8s(data)
else:
# data is int
data_buf[4:8] = data_to_uint8s(int(data))
self.__send_data(0x7FF, data_buf)
def switchControlMode(self, Motor, ControlMode):
"""
switch the control mode of the motor 切换电机控制模式
:param Motor: Motor object 电机对象
:param ControlMode: Control_Type 电机控制模式 example:MIT:Control_Type.MIT MIT模式
"""
max_retries = 20
retry_interval = 0.1 #retry times
RID = 10
self.__write_motor_param(Motor, RID, np.uint8(ControlMode))
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - ControlMode) < 0.1:
return True
else:
return False
return False
def save_motor_param(self, Motor):
"""
save the all parameter to flash 保存所有电机参数
:param Motor: Motor object 电机对象
:return:
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xAA, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.disable(Motor) # before save disable the motor
self.__send_data(0x7FF, data_buf)
sleep(0.001)
def change_limit_param(self, Motor_Type, PMAX, VMAX, TMAX):
"""
change the PMAX VMAX TMAX of the motor 改变电机的PMAX VMAX TMAX
:param Motor_Type:
:param PMAX: 电机的PMAX
:param VMAX: 电机的VMAX
:param TMAX: 电机的TMAX
:return:
"""
self.Limit_Param[Motor_Type][0] = PMAX
self.Limit_Param[Motor_Type][1] = VMAX
self.Limit_Param[Motor_Type][2] = TMAX
def refresh_motor_status(self,Motor):
"""
get the motor status 获得电机状态
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8) & 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xCC, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
self.recv() # receive the data from serial port
def change_motor_param(self, Motor, RID, data):
"""
change the RID of the motor 改变电机的参数
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:param data: 电机参数的值
:return: True or False ,True means success, False means fail
"""
max_retries = 20
retry_interval = 0.05 #retry times
self.__write_motor_param(Motor, RID, data)
for _ in range(max_retries):
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map and RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - data) < 0.1:
return True
else:
return False
sleep(retry_interval)
return False
def read_motor_param(self, Motor, RID):
"""
read only the RID of the motor 读取电机的内部信息例如 版本号等
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:return: 电机参数的值
"""
max_retries = 5
retry_interval = 0.05 #retry times
self.__read_RID_param(Motor, RID)
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
return self.motors_map[Motor.SlaveID].temp_param_dict[RID]
return None
# -------------------------------------------------
# Extract packets from the serial data
def __extract_packets(self, data):
frames = []
header = 0xAA
tail = 0x55
frame_length = 16
i = 0
remainder_pos = 0
while i <= len(data) - frame_length:
if data[i] == header and data[i + frame_length - 1] == tail:
frame = data[i:i + frame_length]
frames.append(frame)
i += frame_length
remainder_pos = i
else:
i += 1
self.data_save = data[remainder_pos:]
return frames
def LIMIT_MIN_MAX(x, min_val, max_val):
return max(min_val, min(x, max_val))
def float_to_uint(x: float, x_min: float, x_max: float, bits):
x = LIMIT_MIN_MAX(x, x_min, x_max)
span = x_max - x_min
data_norm = (x - x_min) / span
return np.uint16(data_norm * ((1 << bits) - 1))
def uint_to_float(x: np.uint16, min: float, max: float, bits):
span = max - min
data_norm = float(x) / ((1 << bits) - 1)
temp = data_norm * span + min
return np.float32(temp)
def float_to_uint8s(value):
# Pack the float into 4 bytes
packed = pack('f', value)
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def data_to_uint8s(value):
# Check if the value is within the range of uint32
if isinstance(value, int) and (0 <= value <= 0xFFFFFFFF):
# Pack the uint32 into 4 bytes
packed = pack('I', value)
else:
raise ValueError("Value must be an integer within the range of uint32")
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def is_in_ranges(number):
"""
check if the number is in the range of uint32
:param number:
:return:
"""
if (7 <= number <= 10) or (13 <= number <= 16) or (35 <= number <= 36):
return True
return False
def uint8s_to_uint32(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single uint32 value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a uint32 value
return unpack('<I', packed)[0]
def uint8s_to_float(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single float value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a float value
return unpack('<f', packed)[0]
def print_hex(data):
hex_values = [f'{byte:02X}' for byte in data]
print(' '.join(hex_values))
def get_enum_by_index(index, enum_class):
try:
return enum_class(index)
except ValueError:
return None
class DM_Motor_Type(IntEnum):
DM4310 = 0
DM4310_48V = 1
DM4340 = 2
DM4340_48V = 3
DM6006 = 4
DM8006 = 5
DM8009 = 6
DM10010L = 7
DM10010 = 8
DMH3510 = 9
DMH6215 = 10
DMG6220 = 11
class DM_variable(IntEnum):
UV_Value = 0
KT_Value = 1
OT_Value = 2
OC_Value = 3
ACC = 4
DEC = 5
MAX_SPD = 6
MST_ID = 7
ESC_ID = 8
TIMEOUT = 9
CTRL_MODE = 10
Damp = 11
Inertia = 12
hw_ver = 13
sw_ver = 14
SN = 15
NPP = 16
Rs = 17
LS = 18
Flux = 19
Gr = 20
PMAX = 21
VMAX = 22
TMAX = 23
I_BW = 24
KP_ASR = 25
KI_ASR = 26
KP_APR = 27
KI_APR = 28
OV_Value = 29
GREF = 30
Deta = 31
V_BW = 32
IQ_c1 = 33
VL_c1 = 34
can_br = 35
sub_ver = 36
u_off = 50
v_off = 51
k1 = 52
k2 = 53
m_off = 54
dir = 55
p_m = 80
xout = 81
class Control_Type(IntEnum):
MIT = 1
POS_VEL = 2
VEL = 3
Torque_Pos = 4
class DamiaoPort:
def __init__(self, device, types, can_ids, master_ids, motor_with_torque, control_mode=Control_Type.MIT):
self.device = device
self.types = types
self.can_ids = can_ids
self.master_ids = master_ids
self.control = MotorControl(self.device, bitrate=4000000)
self.motors = [Motor(type, can_id, master_id) for type, can_id, master_id in zip(types, can_ids, master_ids)]
self.stat_data = []
self.stat_time = []
for motor in self.motors:
self.control.addMotor(motor)
self.control.enable(motor)
def get_present_status(self):
self.stat_time.append(time())
stat = [[
motor.goal_position,
motor.goal_tau,
motor.getPosition(),
motor.getVelocity(),
motor.getTorque(),
motor.state_tmos,
motor.state_trotor,
] for motor in self.motors]
self.stat_data.append(stat)
return stat
def save_status(self, filename):
np.savez(filename, np.array(self.stat_time), np.array(self.stat_data))
def disable(self):
for motor in self.motors:
self.control.disable(motor)
def shutdown(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, 0)
self.control.canbus.shutdown()
def set_zero_position(self):
for motor in self.motors:
self.control.disable(motor)
sleep(1)
for motor in self.motors:
self.control.set_zero_position(motor)
sleep(1)
for motor in self.motors:
self.control.enable(motor)
return 0
async def move_towards(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
await asyncio.sleep(0.00003)
def move_regressor_sync(self, regs, search_range, search_step, goal_positions, kps, kds):
TORQUE_SCALER=30
if len(self.stat_data) == 0:
return self.move_towards_sync(goal_positions, kps, kds)
for motor, reg, goal_position, kp, kd, stat in zip(
self.motors, regs, goal_positions, kps, kds, self.stat_data[-1]):
pos = motor.getPosition()
vel = motor.getVelocity()
delta = goal_position - pos
goal_tau = kp * delta - kd * vel
_goal_pos, _goal_tau, _pos, _vel, _tau = stat
x = np.array([[_pos, _vel, _tau, _goal_pos, _goal_tau],
[pos, vel, motor.getTorque(), goal_position, goal_tau]])
x /= np.array([[np.pi, 10, TORQUE_SCALER, np.pi, TORQUE_SCALER]])
xs = []
for tau in np.linspace(goal_tau/TORQUE_SCALER - search_range,
goal_tau/TORQUE_SCALER + search_range,
num=search_step):
x_ = x.copy()
x_[0,4] = tau
xs.append(x_.flatten())
h = reg.predict(xs)
diff = h - goal_position
tau = TORQUE_SCALER * xs[np.argmin(diff ** 2)][4]
goal_tau = tau
motor.goal_position = goal_position
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, goal_tau)
sleep(0.00003)
def move_towards_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
# sleep(0.00003)
def set_goal_torque_sync(self, goal_taus):
for motor, goal_tau in zip(self.motors, goal_taus):
motor.goal_position = 0
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def move_torque_sync(self, taus):
for motor,tau in zip(self.motors, taus):
motor.goal_position = 0
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def keep_torque_sync(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
async def set_goal_positions(self, goal_positions, kps):
for motor, goal_position, kp in zip(self.motors, goal_positions, kps):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, 1.2, goal_position, 0, 0)
await asyncio.sleep(0.00003)
def set_goal_positions_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, kd, goal_position, 0, 0)
sleep(0.00003)
def set_goal_posvel(self, goal_positions):
for motor, goal_position in zip(self.motors, goal_positions):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.control_pos_force(motor, goal_position, 1, 1)
def controlMIT(self, motor, kp, kd, q, dq, tau):
self.control.controlMIT(self.motors[motor], kp, kd, q, dq, tau)
- damiao_test.py ファイルを作成する
以下のコードを damiao_test.py にコピーしてください
damiao_motor.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import time
import math
import numpy as np
from damiao_motor import Motor, MotorControl, DM_Motor_Type, Control_Type
# Configuration parameters
NUM_MOTORS = 1 # Number of motors to control
CAN_INTERFACE = "can0" # CAN interface name
CAN_BITRATE = 1000000 # CAN bus baud rate
MOTOR_TYPE = DM_Motor_Type.DM4310 # Motor model
# Sine wave parameters
FREQUENCY = 0.1 # Frequency (Hz)
AMPLITUDE = 6 # Amplitude (rad)
DURATION = 60.0 # Operation duration (s)
def main():
# Create motor controller object
control = MotorControl(CAN_INTERFACE, bitrate=CAN_BITRATE)
# Create and add motors
motors = []
for i in range(NUM_MOTORS):
motor = Motor(MOTOR_TYPE, i + 1, i + 0X10) # CAN IDs start from 1
control.addMotor(motor)
motors.append(motor)
control.enable(motor)
print(f"Motor {i + 1} enabled")
try:
start_time = time.time()
while time.time() - start_time < DURATION:
current_time = time.time() - start_time
# Calculate sine wave position
position = AMPLITUDE * math.sin(2 * math.pi * FREQUENCY * current_time)
# Control all motors
for motor in motors:
control.controlMIT(
motor,
kp=10.0, # Position gain
kd=1.0, # Velocity gain
q=position, # Target position
dq=0.0, # Target velocity
tau=0.0 # Feedforward torque
)
# Control frequency
time.sleep(0.001) # 1kHz control frequency
except KeyboardInterrupt:
print("\nProgram interrupted by user")
finally:
# Disable all motors
for motor in motors:
control.disable(motor)
print(f"Motor {motor.SlaveID} disabled")
if __name__ == "__main__":
main()
- damiao_test.py を実行する
python damiao_test.py
モーターは緑色に点灯し、正弦波速度で回転します。
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。