Jetson AGX Orin上でDepth Anything V3をデプロイ

はじめに
Depth Anything V3は、単一のRGB画像から高品質な深度マップを生成することで3D知覚を革新する最先端の単眼深度推定モデルです。特殊なハードウェアや複数のカメラ入力を必要とする従来の深度推定手法とは異なり、Depth Anything V3は高度な深層学習技術を活用して、標準的な2D画像のみを使用して正確な深度情報を予測します。これにより、ハードウェアの制約と計算効率が重要な考慮事項となるエッジAIアプリケーションにとって特に価値があります。このwikiでは、リアルタイムロボティクスアプリケーション向けのROS2統合を使用して、Jetson AGX Orin上でDepth Anything V3をデプロイする方法をガイドします。

前提条件
- reComputer Mini J501 Carrier Board(Jetson AGX Orin)JetPack 6.2搭載
- USBカメラ
- ROS2 Humble環境がインストール済み
技術的ハイライト
-
高品質単眼深度推定: Depth Anything V3は、特殊な深度センサーやステレオカメラセットアップを必要とせずに、単一のRGB画像から正確な深度マップを生成します。
-
エッジデプロイメント最適化: このモデルは、Jetson AGX Orinなどのエッジデバイスでの効率的な推論のために特別に設計されており、最大パフォーマンスのためのTensorRT最適化を備えています。
-
リアルタイム処理: 高解像度画像をリアルタイムで処理する能力があり、自律ナビゲーション、障害物回避、ロボット操作タスクに適しています。
-
ROS2統合: ロボットシステムへのシームレスな統合のために、深度マップとポイントクラウド配信を備えたネイティブROS2 Humbleサポートを提供します。
-
柔軟な入力サポート: USBカメラ、ROSイメージトピック、事前録画されたビデオストリームなど、さまざまな入力ソースで動作します。
環境設定
**ステップ1.**依存関係のインストール
sudo apt update
sudo apt install -y \
build-essential \
cmake \
git \
libopencv-dev \
python3-pip \
python3-colcon-common-extensions \
v4l-utils
ステップ2. Python依存関係のインストール
pip3 install numpy opencv-python
ステップ3. CUDA環境変数の設定
# Add CUDA environment variables to .bashrc
echo '
# CUDA Environment
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export CUDACXX=$CUDA_HOME/bin/nvcc
' >> ~/.bashrc
# Reload shell configuration
source ~/.bashrc
# Verify CUDA installation
nvcc --version

ステップ4. ROS2 USBカメラパッケージのインストール
# Install USB camera driver for ROS2
sudo apt install -y ros-humble-usb-cam
# Install additional ROS2 dependencies
sudo apt install -y ros-humble-cv-bridge
sudo apt install -y ros-humble-image-transport
sudo apt install -y ros-humble-image-geometry
sudo apt install -y ros-humble-cv-bridge ros-humble-image-transport ros-humble-rviz2
ステップ5. Depth Anything V3 ROS2環境のセットアップ
# Clone the repository
git clone https://github.com/zibochen6/ros2-depth-anything-v3-trt.git
# Navigate to the project directory
cd ros2-depth-anything-v3-trt
ステップ6. ROS2パッケージのビルド
# Build the depth_anything_v3 package with Release configuration
colcon build --packages-select depth_anything_v3 --cmake-args -DCMAKE_BUILD_TYPE=Release
# Source the workspace
source install/setup.bash
ステップ7. TensorRTエンジンの生成
エンジンファイルを生成する前に、Depth Anything V3の.onnxモデルを事前にダウンロードし、ros2-depth-anything-v3-trt/onnxディレクトリに配置する必要があります。
# Make the engine generation script executable
chmod +x generate_engines.sh
# Generate TensorRT engines from ONNX models
./generate_engines.sh onnx
.engineファイルが生成されている間、しばらくお待ちください。変換が完了すると、onnxディレクトリに以下のように2つのファイルが作成されます。

深度推定の実行
深度推定用カメラ
ステップ1. USBカメラの接続
USBカメラをJetson AGX Orinデバイスに接続します。カメラが検出されていることを確認してください:
# Check if USB camera is detected
ls /dev/video*
期待される出力:
/dev/video0 /dev/video1
ステップ2. カメラキャリブレーション
v4l2_cameraパッケージは、Linux Video4Linux2(V4L2)APIとROS 2トピック間のブリッジとして機能し、キャリブレーションパイプラインで簡単に使用できる画像とカメラ情報メッセージを配信します。
カメラキャリブレーションパッケージのインストール:
# Install Camera Calibration Package
sudo apt install ros-humble-camera-calibration
# v4l2_camera is the official ROS2 maintained node that can directly publish USB camera images
sudo apt install ros-${ROS_DISTRO}-v4l2-camera
カメラノードの起動:
# Launch camera node
ros2 run v4l2_camera v4l2_camera_node \
--ros-args \
-p image_size:=[640,480] \
-p pixel_format:=YUYV
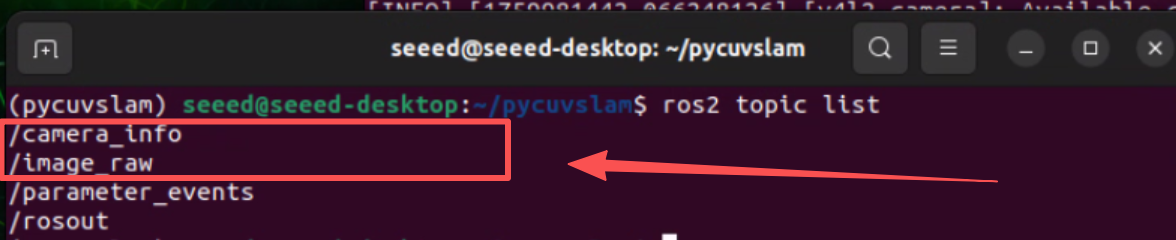
デフォルトで配信されるトピックは:
/image_raw- 生カメラ画像/camera- カメラ情報
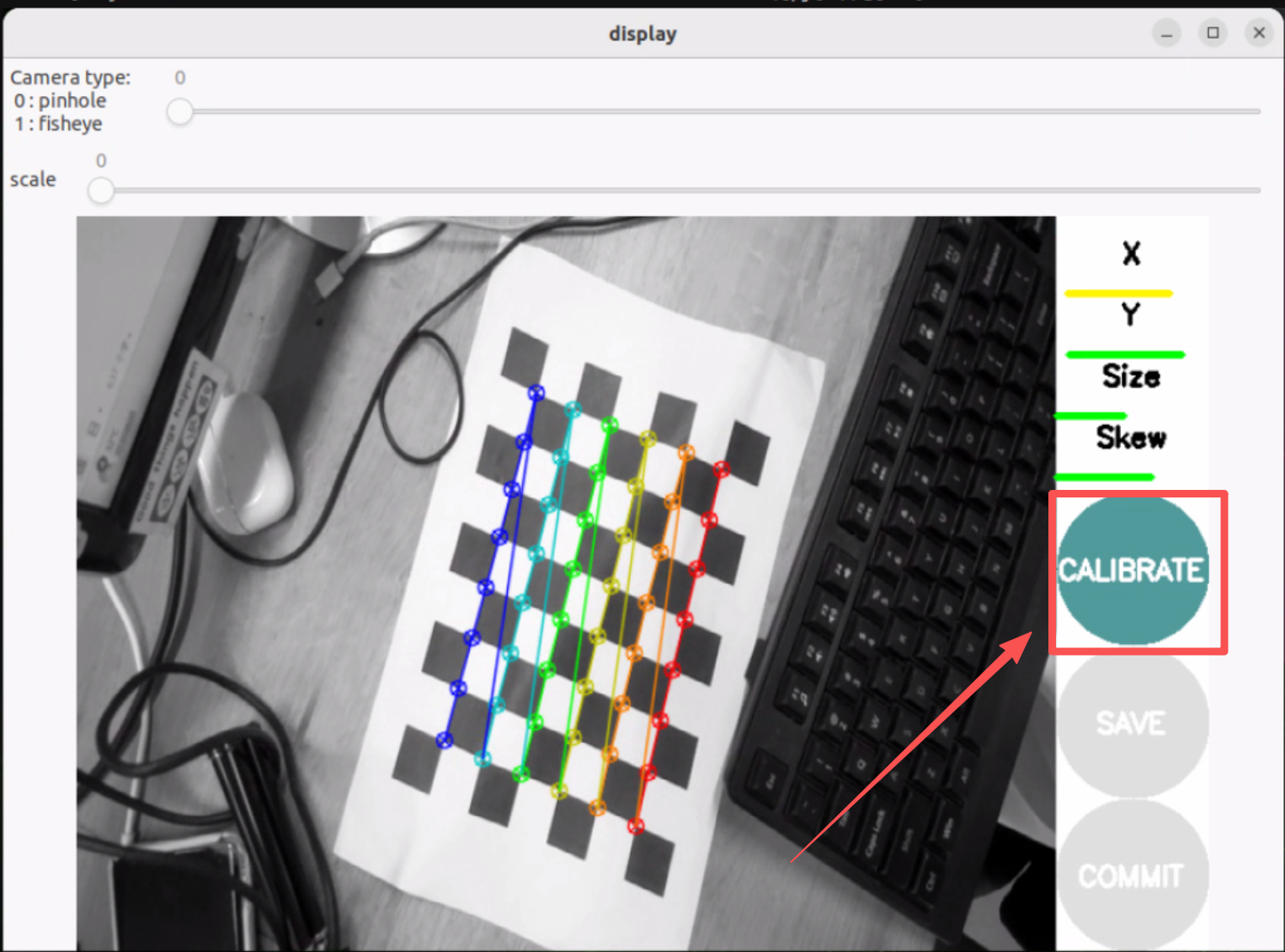
カメラキャリブレーションの実行:
# In another terminal
ros2 run camera_calibration cameracalibrator \
--size 8x6 \
--square 0.025 \
--fisheye-recompute-extrinsicsts \
--fisheye-fix-skew \
--ros-args --remap image:=/image_raw --remap camera:=/v4l2_camera
--size 8x6は内側の角の数を指します(8×6 = 9×7グリッドの48角)--square 0.025は正方形のサイズをメートル単位で指します(25mm)CALIBRATEボタンが点灯するまで、カメラを動かしてさまざまな角度から画像をキャプチャしてください
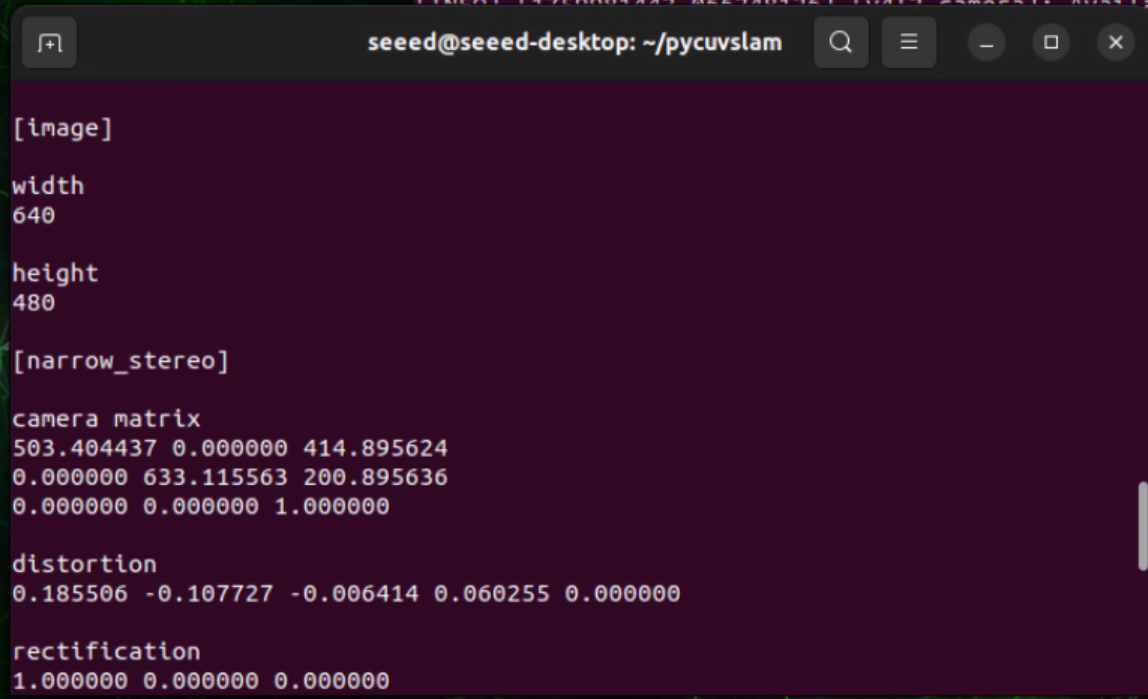
キャリブレーションが成功すると、ターミナルで以下のようなカメラパラメータが取得されます:
カメラキャリブレーションについては、このwikiを参照してください。
キャリブレーションされたパラメータをcamera_info_example.yamlファイルに書き込みます
ステップ3. USBカメラノードの起動
GMSLカメラの魚眼歪みを補正するために、キャリブレーションパラメータをcamera_info_example.yamlファイルに保存します。その後、リアルタイム深度推定のために以下のコマンドを実行します:
#Start the script for camera depth estimation
CAMERA_INFO_FILE=camera_info_example.yaml ENABLE_UNDISTORTION=1 ./run_camera_depth.sh
深度推定用ビデオ
ステップ1. ビデオファイルの準備
深度推定用のビデオファイルを準備します。
ステップ2. ビデオ深度推定ノードの起動
#Start the script for video depth estimation
./run_video_depth.sh
参考文献
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験ができるだけスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャネルを提供しています。