DM_Gripper – オープンソース組み立てガイド
DM_Gripperは、DM-4310-2ECモーターを中心に設計されたオープンソースの3Dプリント製ロボットグリッパーです。そのモジュラー設計は組み立てと分解の容易さを重視し、ホビイストとロボティクス開発者の両方が迅速にプロトタイプを作成、カスタマイズ、スケールできるようにします。
DAMIAOアクチュエーターと完全に互換性があり、DM_Gripperは他のアクチュエーターブランドとの統合にも柔軟性を提供します。その独特な交換可能クロウシステムにより、ユーザーは異なる形状のクロウを素早く交換でき、多様なロボットタスクと使用ケースをサポートします。
すべてのグリッパー部品は完全に3Dプリント可能で、最小限のサポート要件で、メーカー、研究者、エンジニアにとってアクセスしやすくなっています。
このwikiには以下が含まれます:
- メカニズム設計の概要
- 完全な部品表(BOM)
- 3Dプリントガイドとセットアップ
- ステップバイステップ組み立て手順
- デモと実用的な使用例
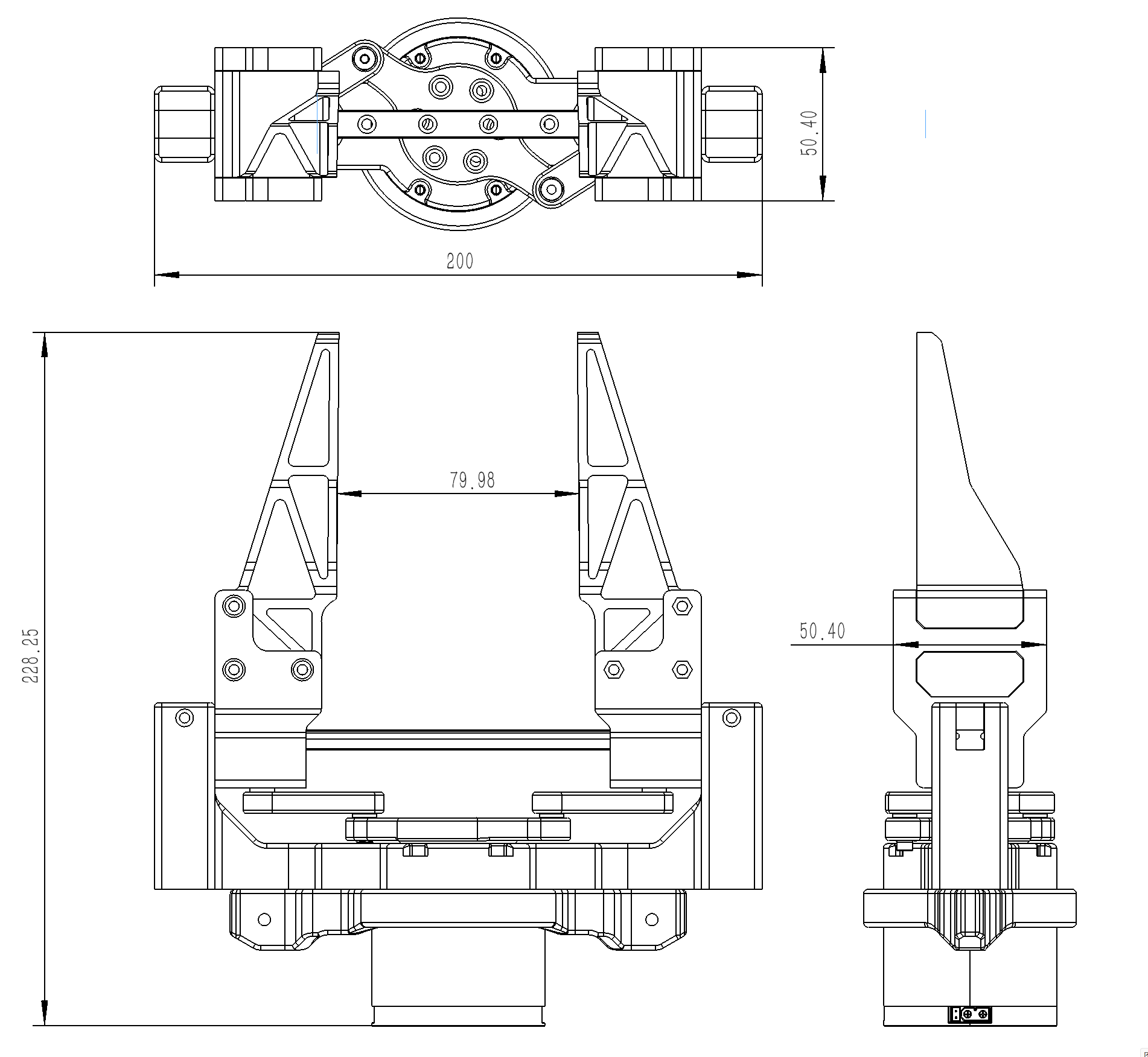
寸法/動作範囲
寸法と動作範囲は以下にミリメートル単位で示されており、使用するクロウによって高さが変わります。
駆動メカニズム
このグリッパーは古典的なデュアルクランク&スライダーメカニズムを特徴とし、回転運動を軸方向運動に変換します。
- クランク&スライダーショーケース:

- モーションシミュレーションショーケース
BOM
🔩 ファスナー
| 名前 | 数量 |
|---|---|
| フィリップスパンヘッドスクリュー PM3×8 | 8 |
| 六角穴付きキャップスクリュー M3×20 | 4 |
| 六角穴付きキャップスクリュー M3×25 | 6 |
| 六角穴付きキャップスクリュー M3×50 | 8 |
| 六角穴付きキャップスクリュー M3×16 | 12 |
| 304ナイロンロッキング六角セルフロッキングナット M3 (厚さ-3.9mm × 幅-5.5mm) | 18 |
| スプリングワッシャー – M3 | 4 |
| フラットワッシャー – M3×7mm (外径) × 0.5mm (厚さ) | 8 |
⚙️ ベアリング
| 名前 | 数量 |
|---|---|
| F3-8M ミニチュアスラストベアリング (内径-3mm × 外径-8mm × 厚さ-3.5mm) | 4 |
🛠️ リニアモーション
| 名前 | 数量 |
|---|---|
| ステンレス鋼リニアレール MGN9, 200 mm | 1 |
| リニアレールキャリッジ MGN9C (標準) | 2 |
🔌 アクチュエーター
| 名前 | 数量 |
|---|---|
| DM4310-2ECモーター | 1 |
🧩 カスタムプリント品
| 名前 | 数量 |
|---|---|
| 3Dプリント部品 | 1セット |
組み立てガイド
3Dプリントガイド
-
専用サポート材料またはPETG+PLAを AMS に入れており、サポート面で最高の表面仕上げを求める場合は、 このWikiを参照してください。 注意:プリントジョブに時間がかかる場合があります。
-
プリントするフィラメントが1つしかない場合は、正しい向きでプリントし、以下の手順が必要かどうかを決定してください(Bambu StudioでADVANCEDをオンにしてください)。
警告PETGまたはABSを使用している場合は、Top Z距離を変更しないでください。デフォルトのままにしてください。PLAを使用する場合のみこれを変更してください。
-
ステップ1:最小限のサポートが必要なプリントレイアウト

-
ステップ2:スカーフ設定により、緑の長方形でマークされた部分でより良い表面仕上げが得られます。

-
ステップ3:私のプリント設定:0.2mmレイヤー高さ、25%インフィル密度、スタイル – 3Dハニカム。




-
ステップバイステップ組み立てウォークスルー
- ステップ1:8本のM3×8マッシュルームヘッドスクリューでクロウホルダーをMGN9Cスライダーに固定する
- ステップ2:ベアリング、ローター、リンケージを「ハンバーガー」スタイルで積み重ねる
- ステップ3:スロットの上下に8個のM7ワッシャーを配置する
- ステップ4:ワッシャーの上下に4個のナットを配置する
- ステップ5:4組のM3×20スクリューとスプリングワッシャーをナットにねじ込む(必要に応じてプライヤーを使用)
- ステップ6:ベースとアクチュエーターを所定の位置に配置する;ロータープレートとアクチュエーターのパターンが一致する必要がある
- ステップ7:6本のM3×16スクリューでロータープレートをアクチュエーターに固定する
- ステップ8:次のステップのためにクロウベースを最大範囲まで押し出す
- ステップ9:カムホルダーを底部に取り付ける
- ステップ10:4組のM3×25スクリューとナットでカムホルダーを固定する
- ステップ11:6本のM3×16スクリューでベースを固定する(この段階でレールを引き出し、後でスライドして戻す)
- ステップ12:2組のM3×50スクリューとナットを使用してレールをベースにロックする
- ステップ13:レールプレッサーをスライドして挿入し、2組のM3×25スクリューとナットで固定する
- ステップ14:クロウをクロウホルダーに配置し、6組のM3×50スクリューとナットで固定する
デモとCADファイル
- まだ設定していない場合は、Damiao Actuators Wikiに従ってすべてを設定してください。
- トルクコントローラーデモ(tianrkingに感謝)に従って、クールなGUIでグリッパーを動かしてください。

- CADリソース:編集可能なSTEPファイルとSTLはこちらで入手できます。