Edge Impulseを使用したGrove Vision AIのモデル高速トレーニング
Grove - Vision AI Moduleは、Himax HX6537-Aプロセッサをベースにした親指サイズのボードで、2メガピクセルのOV2640カメラ、マイク、3軸加速度計、3軸ジャイロスコープを搭載しています。32 MBのSPIフラッシュストレージを提供し、顔認識や人物検出のための機械学習アルゴリズムがプリインストールされており、カスタマイズされたモデルもサポートしています。このモジュールはXIAOエコシステムやArduinoと互換性があり、AI対応カメラプロジェクトを始めるのに最適です!
このモジュールはEdge Impulseに完全対応しており、カメラからの生データをサンプリングし、モデルを構築し、トレーニング済みの機械学習モデルをスタジオから直接モジュールにデプロイすることができます。プログラミングは不要です。Seeed Studio Bazaarから直接購入可能です。
このボード用のEdge Impulseファームウェアはオープンソースで、GitHubにホストされています:edgeimpulse/firmware-seeed-vision-ai-internal
クイックリンク:
- ファームウェアのソースコード:GitHubリポジトリ
- 事前コンパイル済みファームウェア:seeed-grove-vision-ai.zip
依存関係のインストール
このボードをEdge Impulseでセットアップするには、以下のソフトウェアをインストールする必要があります:
- Edge Impulse CLI。
- Linuxの場合:
- GNU Screen:例えば
sudo apt install screenでインストール。
- GNU Screen:例えば
- 最新のBouffalo Lab Dev Cubeをダウンロード。
Edge Impulse CLIのインストールに問題がありますか? インストールとトラブルシューティングガイドを参照してください。
Edge Impulseへの接続
すべてのソフトウェアが揃ったら、ボードをEdge Impulseに接続します。
ステップ1. BL702チップのファームウェアを更新
BL702は、PCとHimaxチップ間の通信を可能にするUSB-UARTチップです。Edge Impulseファームウェアが正しく動作するように、このファームウェアを更新する必要があります。
- 以下のリンクから最新バージョンのブートローダーファイルをダウンロードします。ブートローダーの名前は通常
tinyuf2-grove_vision_ai_vx.x.x.binです。
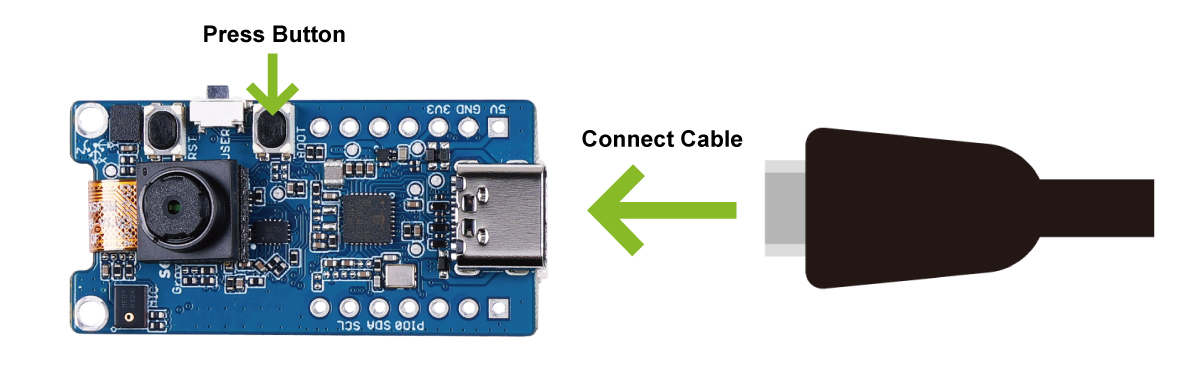
- ボードをUSB Type-CケーブルでPCに接続し、ボード上のBootボタンを押しながら接続します。
- 事前にインストールしたBouffalo Lab Dev Cubeソフトウェアを開き、BL702/704/706を選択し、Finishをクリックします。

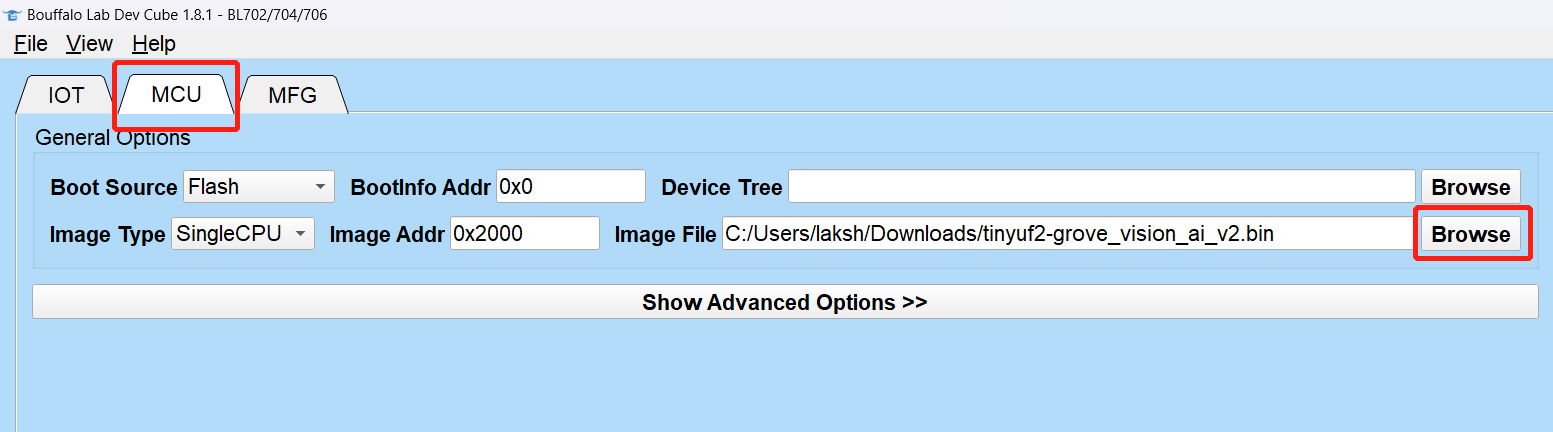
- MCUタブに移動します。Image fileの下でBrowseをクリックし、先ほどダウンロードしたファームウェアを選択します。
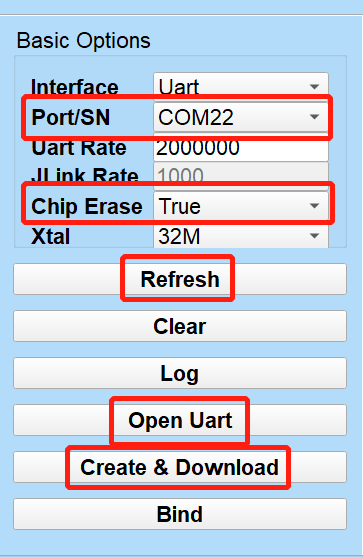
- Refreshをクリックし、接続されたボードに関連するPortを選択します。Chip EraseをTrueに設定し、Open UARTをクリックしてからCreate & Downloadをクリックし、プロセスが完了するのを待ちます。
プロセスが成功すると、All Successと表示されます。
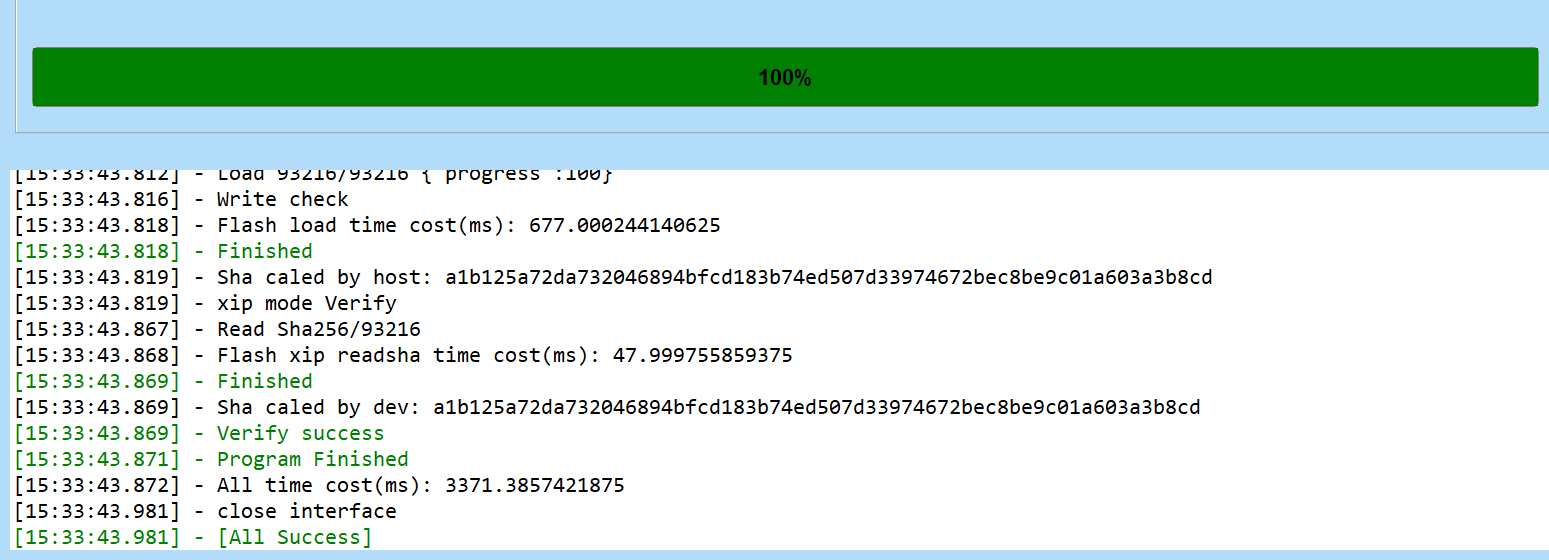
フラッシング中にエラーが発生した場合は、Create & Downloadを複数回クリックして、All Successメッセージが表示されるまで試してください。
ステップ2. Edge Impulseファームウェアを更新
ボードにはまだ適切なEdge Impulseファームウェアが搭載されていません。ファームウェアを更新するには:
-
最新のEdge Impulseファームウェアをダウンロードし、解凍してfirmware.uf2ファイルを取得します。
-
再度USB Type-CケーブルでボードをPCに接続し、ボード上のBootボタンをダブルクリックしてマスストレージモードに入ります。
-
これにより、ファイルエクスプローラーにGROVEAIという新しいストレージドライブが表示されます。firmware.uf2ファイルをGROVEAIドライブにドラッグ&ドロップします。
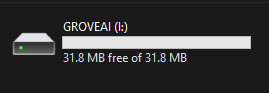
コピーが完了すると、GROVEAI ドライブは消えます。これにより、コピーが成功したかどうかを確認できます。
ステップ 3. キーの設定
コマンドプロンプトまたはターミナルで以下を実行します:
edge-impulse-daemon
これによりウィザードが開始され、ログインと Edge Impulse プロジェクトの選択を求められます。プロジェクトを切り替えたい場合は、--clean オプションを付けてコマンドを実行してください。
また、Google Chrome や Microsoft Edge の最近のバージョンでは、Edge Impulse CLI を使用せずにボードから直接データを収集することができます。詳細については、このブログ記事をご覧ください。
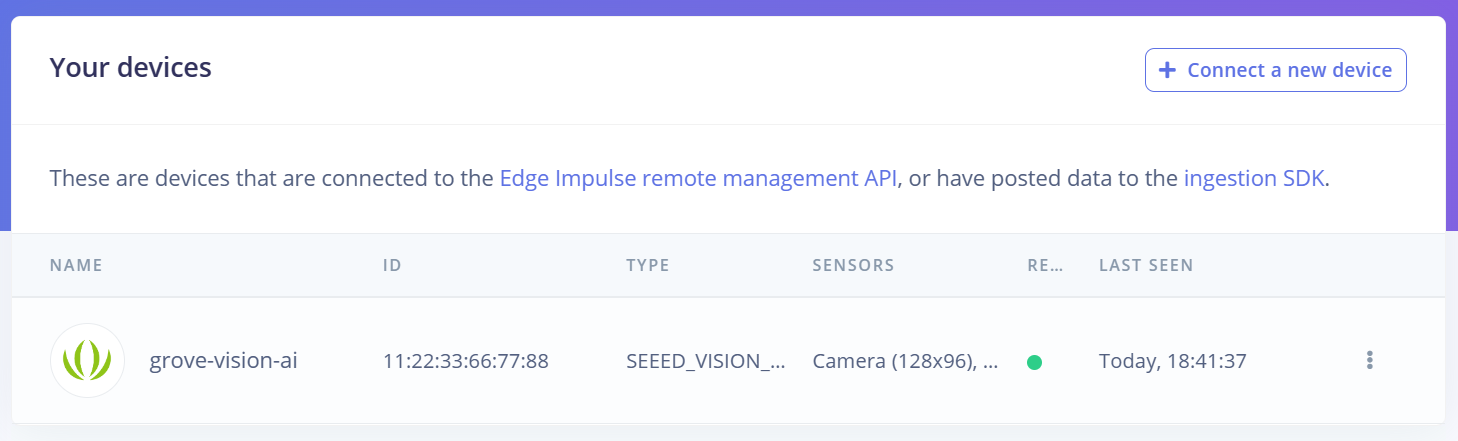
ステップ 4. デバイスが接続されていることを確認する
これで完了です!デバイスは Edge Impulse に接続されました。これを確認するには、Edge Impulse プロジェクトにアクセスし、Devices をクリックしてください。ここにデバイスが表示されます。
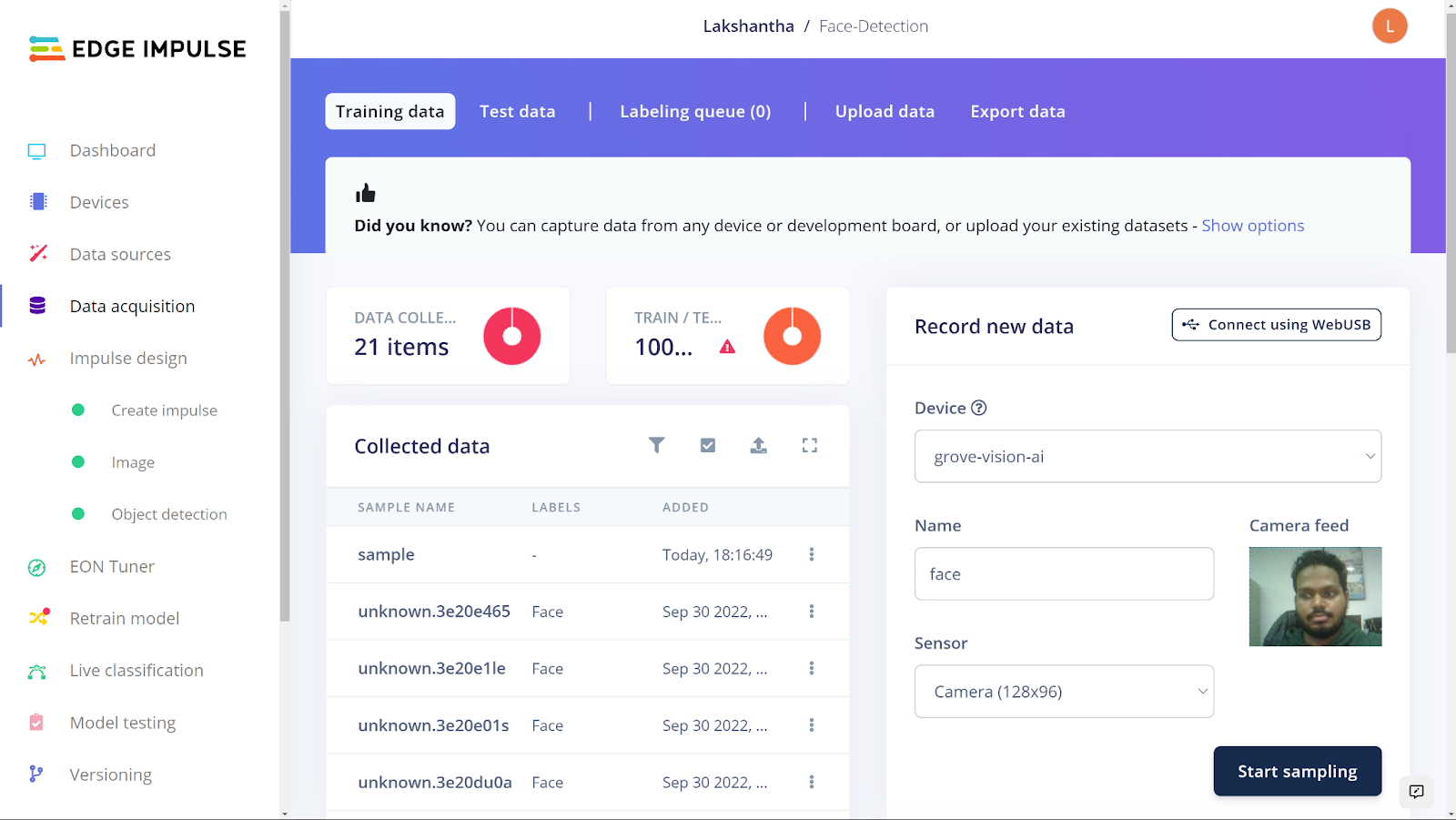
Grove - Vision AI からデータを収集する
すべての設定が完了したら、以下のチュートリアルを使用して最初の機械学習モデルを構築して実行できます:
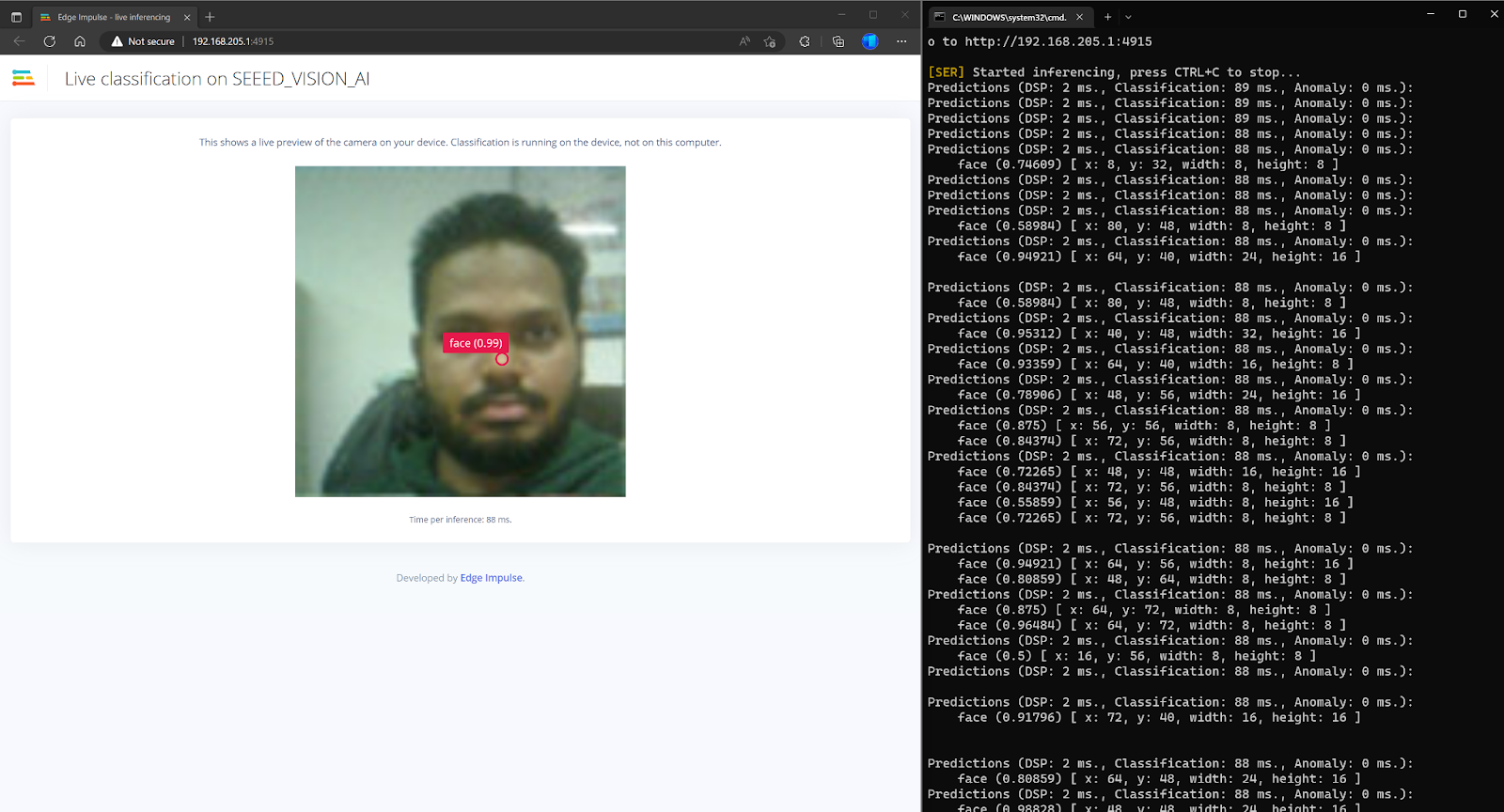
オンボードカメラからのフレームは、スタジオから直接キャプチャできます:
最後に、モデルがトレーニングされたら、それを Grove – Vision AI モジュールに簡単にデプロイして推論を開始できます!
Grove - Vision AI にモデルをデプロイする
機械学習モデルを構築し、Edge Impulse Studio から Edge Impulse ファームウェアをダウンロードした後、Edge Impulse ファームウェアの更新セクションのステップ 1 と 2 に従って、モデルの uf2 を Grove - Vision AI にデプロイします。
Edge Impulse ファームウェアをソースからコンパイルする
Edge Impulse ファームウェアをソースコードからコンパイルしたい場合は、この GitHub リポジトリを訪問し、README に記載されている手順に従ってください。公式ファームウェアで使用されているモデルは、この公開プロジェクトで確認できます。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品をスムーズにご利用いただけるよう、さまざまなサポートをご提供しています。お客様のご希望やニーズに応じた複数のコミュニケーションチャネルをご用意しています。