Grove による MCP の拡張
概要
このドキュメントでは、ESP32-S3 ベースの SenseCAP Watcher 開発ボード上で Grove インターフェースを介して DHT20 温湿度センサーを使用する方法について説明します。
ハードウェアの準備
| SenseCAP Watcher for XiaoZhi | Grove - Temperature & Humidity Sensor V2.0 (DHT20) |
|---|---|
 | 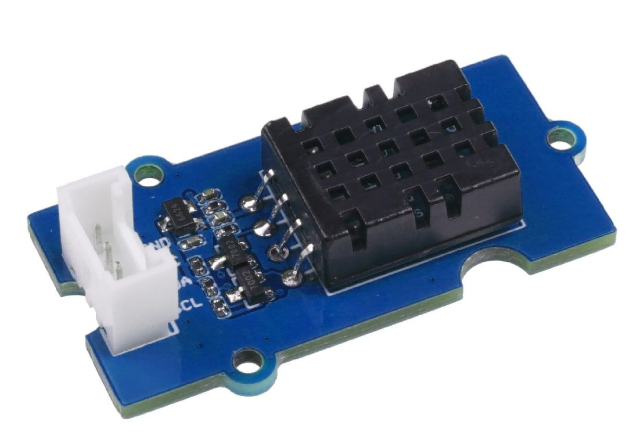 |
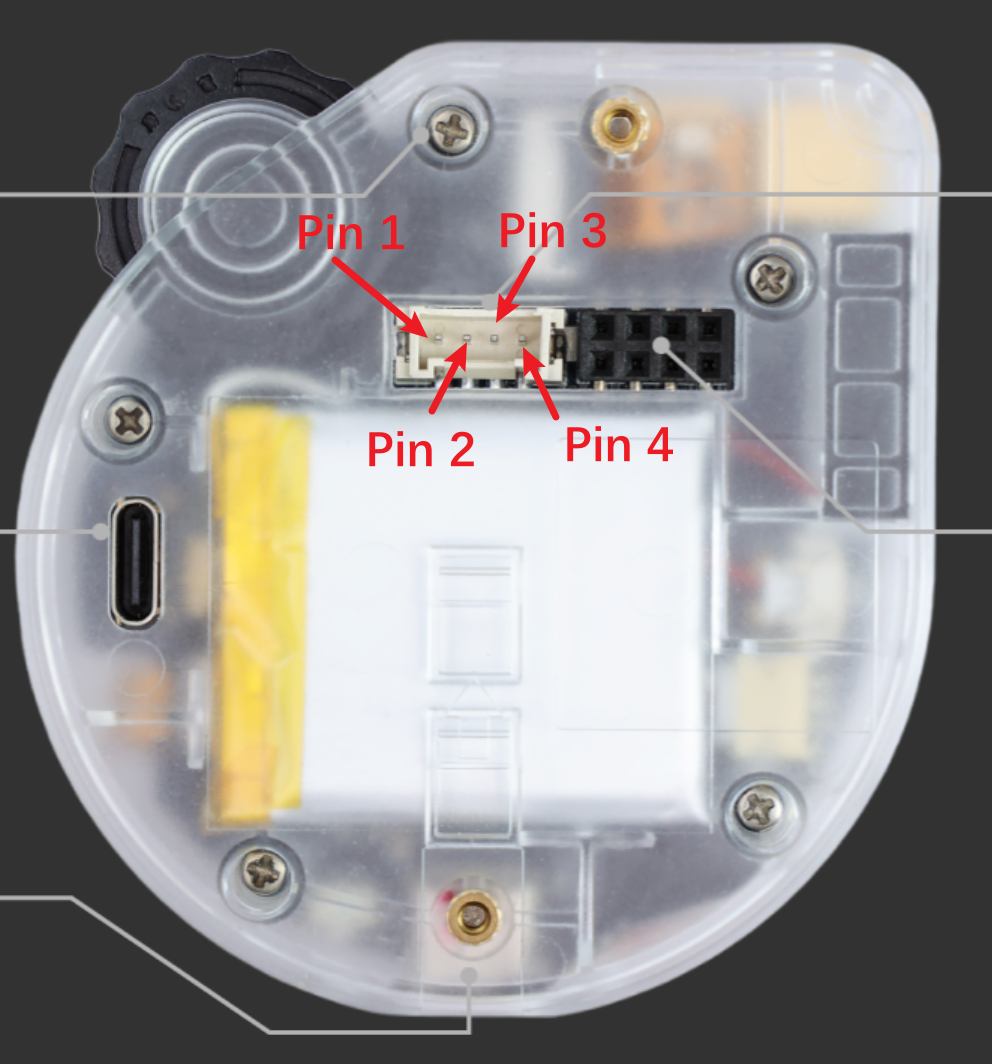
Grove インターフェース定義(J5)
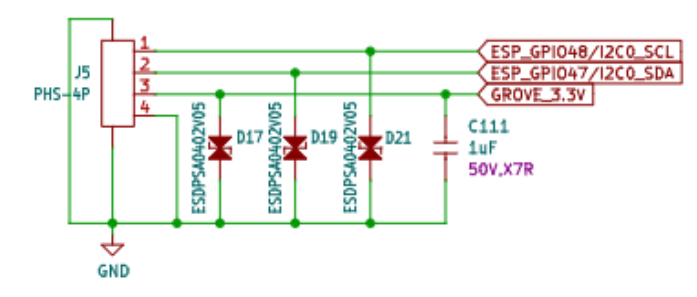
ハードウェア回路図によると、Grove インターフェースは以下のピンを使用します:
| Grove ピン | 機能 | ESP32-S3 接続 |
|---|---|---|
| Pin 1 | SCL | GPIO48 (I2C0_SCL) |
| Pin 2 | SDA | GPIO47 (I2C0_SDA) |
| Pin 3 | VCC | GROVE_3.3V (3.3V 電源) |
| Pin 4 | GND | GND |
DHT20 センサー
- I2C アドレス:0x38(固定、変更不可)
- 供給電圧:2.0V - 5.5V(3.3V を使用)
- 通信プロトコル:I2C(最大 400kHz)
- 測定範囲:
- 温度:-40°C ~ +80°C(精度:±0.5°C)
- 湿度:0% ~ 100% RH(精度:±3% RH)
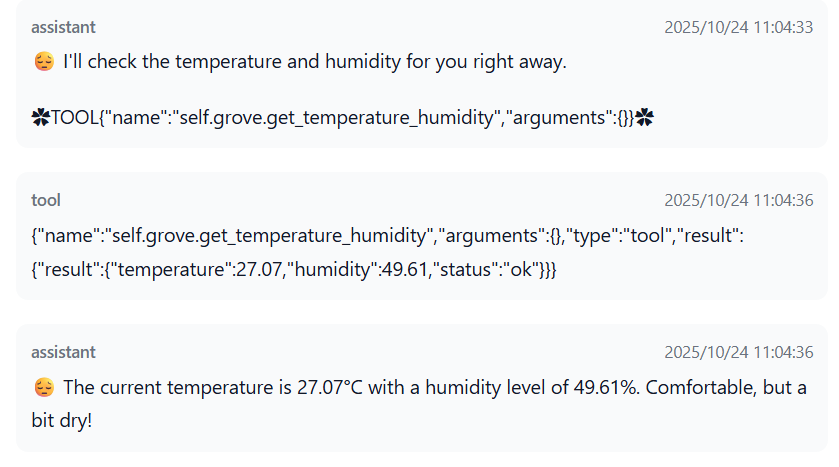
実行結果
ファイル構造
元のコード:
新しいファイル:
-
上記の 2 つのファイルを以下の場所に配置してください:
- ファイルの場所
main/boards/sensecap-watcher/
├── dht20.h # DHT20 driver header
└── dht20.cc # DHT20 driver implementation
- ファイルの場所
変更されたファイル
-
変更されたコード部分については、コア機能(内部 MCP ツールインターフェース)を参照してください。
-
上記のファイルを以下の場所で置き換えてください:
- ファイルの場所
main/boards/sensecap-watcher/
└── sensecap_watcher.cc # Integrates DHT20 sensor and MCP tool
- ファイルの場所
注意
上記のサンプルコードは参考用です。適切な統合と正常なコンパイルを確保するために、特定のセンサーモデル、開発環境、ファームウェアバージョンに応じて変更してください。
- Grove I2C センサーは I2C バスに直接接続できます。
- 非 I2C センサーは利用可能な GPIO ピンを介して接続でき、さまざまなセンサータイプの柔軟な統合が可能です。
コア機能(DHT20 センサー)
1. センサーの初期化
DHT20 ドライバーは完全な初期化プロセスを実装します:
- ステップ1. センサーリセット:0xBA リセットコマンドを送信
- ステップ2. システム設定:レジスタ 0xE1 に [0x08, 0x00] を書き込み
- ステップ3. キャリブレーション確認:ステータスレジスタのビット[3]をチェックしてセンサーがキャリブレーションされていることを確認
- ステップ4. 再試行メカニズム:キャリブレーションが失敗した場合、最大 5 回まで再試行
esp_err_t ret = dht20_sensor_->Initialize();
if (ret == ESP_OK) {
ESP_LOGI(TAG, "DHT20 initialized successfully");
}
2. 温度・湿度の読み取り
読み取りプロセス:
- ステップ1. 測定トリガー:コマンド [0xAC, 0x33, 0x00] を送信
- ステップ2. 測定待機:80ms 遅延
- ステップ3. 8 バイト読み取り:[ステータス、湿度 High、Middle、Low | 温度 High、Middle、Low、CRC]
- ステップ4. データ解析:
- 湿度 = (20 ビット生値) × 100 / 2^20
- 温度 = (20 ビット生値) × 200 / 2^20 - 50
float temperature, humidity;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret == ESP_OK) {
printf("Temperature: %.2f°C, Humidity: %.2f%%\n", temperature, humidity);
}
3. I2C 通信プロトコル
| 機能 | コマンド/レジスタ | データ |
|---|---|---|
| センサーリセット | 0xBA | - |
| 設定レジスタ | 0xE1 | [0x08, 0x00] |
| 測定トリガー | - | [0xAC, 0x33, 0x00] |
| ステータス読み取り | - | 1 バイト |
| データ読み取り | - | 7 バイト |
4. ステータスバイト定義
| ビット | 機能 | 値 |
|---|---|---|
| bit[7] | 測定ステータス | 1=測定中、0=アイドル |
| bit[6:4] | 予約済み | - |
| bit[3] | キャリブレーションステータス | 1=キャリブレーション済み、0=未キャリブレーション |
| bit[2:0] | 予約済み | - |
5. データ解析アルゴリズム
// Humidity data (20 bits)
uint32_t humidity_raw = (data[1] << 12) | (data[2] << 4) | (data[3] >> 4);
float humidity = humidity_raw * 100.0f / 1048576.0f;
// Temperature data (20 bits)
uint32_t temperature_raw = ((data[3] & 0x0F) << 16) | (data[4] << 8) | data[5];
float temperature = temperature_raw * 200.0f / 1048576.0f - 50.0f;
コア機能(内部 MCP ツールインターフェース)
1. 機能説明
- ツール名:
self.grove.get_temperature_humidity - ツール用途:Grove 接続された DHT20 センサーから現在の温度と湿度を読み取る
2. 呼び出し例
AI は以下のように呼び出すことができます:
result = call_tool("self.grove.get_temperature_humidity", {})
3. 戻り値の形式
-
成功時:
{
"temperature": 25.32,
"humidity": 65.47,
"status": "ok"
} -
失敗時:
{
"error": "DHT20 sensor not initialized"
}または
{
"error": "Failed to read DHT20: ESP_ERR_TIMEOUT"
}
4. 変更されたコード部分と説明
ヘッダーファイルのインクルードを追加
-
sensecap_watcher.ccの先頭に以下のインクルード文を追加してください:#include "dht20.h"
#include "mcp_server.h" -
目的
-
dht20.h — DHT20 センサーのドライバー API を導入し、温度と湿度の読み取りを可能にします。
-
mcp_server.h — 内部 MCP サーバーに関連する API を提供し、MCP ツールの通信と登録を可能にします。
-
メンバー変数を追加
-
SensecapWatcherクラスに以下のメンバー変数を追加してください:DHT20* dht20_sensor_ = nullptr; -
目的
dht20_sensor_— Grove インターフェース経由で接続された DHT20 センサーオブジェクトへのポインタ。SensecapWatcherインスタンスのライフサイクル全体を通じて温湿度センサーを初期化、保存、アクセスするために使用されます。InitializeDHT20()で割り当てられ、MCP ツールがセンサーデータを読み取るために使用されます。- センサーがまだセットアップされていないことを示すために
nullptrに初期化され、読み取り前にヌルチェックが実行されます。
DHT20 初期化と MCP ツールを追加
-
SensecapWatcherクラスに以下のメンバー関数を追加してください:void InitializeDHT20() {
ESP_LOGI(TAG, "Initialize DHT20 sensor on Grove port");
// Create DHT20 sensor instance
dht20_sensor_ = new DHT20(i2c_bus_);
// Initialize and calibrate the sensor
esp_err_t ret = dht20_sensor_->Initialize();
if (ret != ESP_OK) {
ESP_LOGE(TAG, "DHT20 initialization failed: %s", esp_err_to_name(ret));
delete dht20_sensor_;
dht20_sensor_ = nullptr;
return;
}
ESP_LOGI(TAG, "DHT20 sensor initialized successfully");
// Register MCP tool for reading temperature and humidity
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("self.grove.get_temperature_humidity",
"Read temperature and humidity from the Grove-connected DHT20 sensor.\n"
"Return format: {\"temperature\": value(°C), \"humidity\": value(%), \"status\": \"ok\"}\n"
"If reading fails, returns an error message.",
PropertyList(),
[this](const PropertyList&) -> ReturnValue {
if (!dht20_sensor_) {
return "{\"error\": \"DHT20 sensor not initialized\"}";
}
float temperature = 0.0f;
float humidity = 0.0f;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret != ESP_OK) {
std::string error_msg = "{\"error\": \"Failed to read DHT20: ";
error_msg += esp_err_to_name(ret);
error_msg += "\"}";
return error_msg;
}
// Format response as JSON
char buffer[128];
snprintf(buffer, sizeof(buffer),
"{\"temperature\": %.2f, \"humidity\": %.2f, \"status\": \"ok\"}",
temperature, humidity);
return std::string(buffer);
});
ESP_LOGI(TAG, "DHT20 MCP tool registered: self.grove.get_temperature_humidity");
} -
コンストラクタでDHT20初期化呼び出しを追加
SensecapWatcher() {
...
InitializeCamera();
InitializeDHT20(); // Initialize Grove DHT20 sensor
} -
目的
InitializeDHT20()— Grove インターフェース上のDHT20センサーを初期化し、温度と湿度データへの内部アクセスを可能にするMCPツールを登録します。- この関数は
DHT20インスタンスを作成し、キャリブレーションを行い、初期化エラーをチェックします。 - 初期化が成功すると、JSON経由でセンサーデータを読み取るためのMCPツール
self.grove.get_temperature_humidityを登録します。 - ボードの起動時にセンサーが準備完了状態になるよう、
SensecapWatcherのコンストラクタで呼び出されます:
トラブルシューティング
よくある問題
- センサー初期化失敗
- 考えられる原因:
- Grove インターフェースが正しく電源供給されていない
- I2C接続の問題
- センサーが接続されていない、または損傷している
- 解決方法
uint32_t grove_power = esp_io_expander_get_level(io_exp_handle, BSP_PWR_GROVE);
ESP_LOGI(TAG, "Grove power status: %d", grove_power);
- 読み取りタイムアウト
- 考えられる原因:
- センサーがビジー状態
- I2Cバスの競合
- 解決方法
- 読み取り間隔を1秒以上確保する
- I2C上の他のデバイスを確認する
- 無効なデータ
- 考えられる原因:
- センサーがキャリブレーションされていない
- CRCチェックが失敗(現在のバージョンでは未実装)
- 解決方法:
- センサーを再初期化する
- CRCチェック(data[6])の実装を検討する
参考資料
メンテナンス
コードはmain/boards/sensecap-watcher/に存在し、他のボードには影響しません。