LeRobot SO-101 アーム用 GR00T N1.5 のファインチューニングと Jetson AGX Thor へのデプロイ
はじめに
このwikiでは、LeRobot SO-101 アーム用のNVIDIA Isaac GR00T N1.5をファインチューニングし、NVIDIA Jetson Thorにデプロイする方法を説明します。以下の内容を含みます:
- LeRobot SO-101 と Jetson AGX Thor のハードウェア準備
- Jetson Thor 上での GR00T N1.5 のソフトウェア環境セットアップ
- LeRobot トレーニングプラットフォームの使用:データ収集、データセット形式、SO-101 アーム用のファインチューニング
- トレーニング済み GR00T N1.5 ポリシー(LeRobot + SO-101)を Jetson Thor にデプロイするワークフロー例
- トラブルシューティングのヒントと一般的な落とし穴

初期セットアップから完全なデプロイまでをサポートするため、詳細なステップバイステップの手順とリファレンスドキュメントが提供されています。
NVIDIA Jetson Thor Developer Kit の使い方
Jetson Thor の概要
NVIDIA® Jetson AGX Thor™ Developer Kitは、物理AIとヒューマノイドロボティクスのためのパワーハウスです。NVIDIA Blackwell GPU を中心に構築され、128 GB の高速メモリを含み、40-130 W(一般的な使用では最大130 W)の電力エンベロープ内で動作しながら、最大2,070 FP4 TFLOPSのAI計算能力を提供します。
Jetson AGX Thor Developer Kit は Seeed Studio からこちらで入手できます:Seeed – NVIDIA Jetson AGX Thor™ Developer Kit

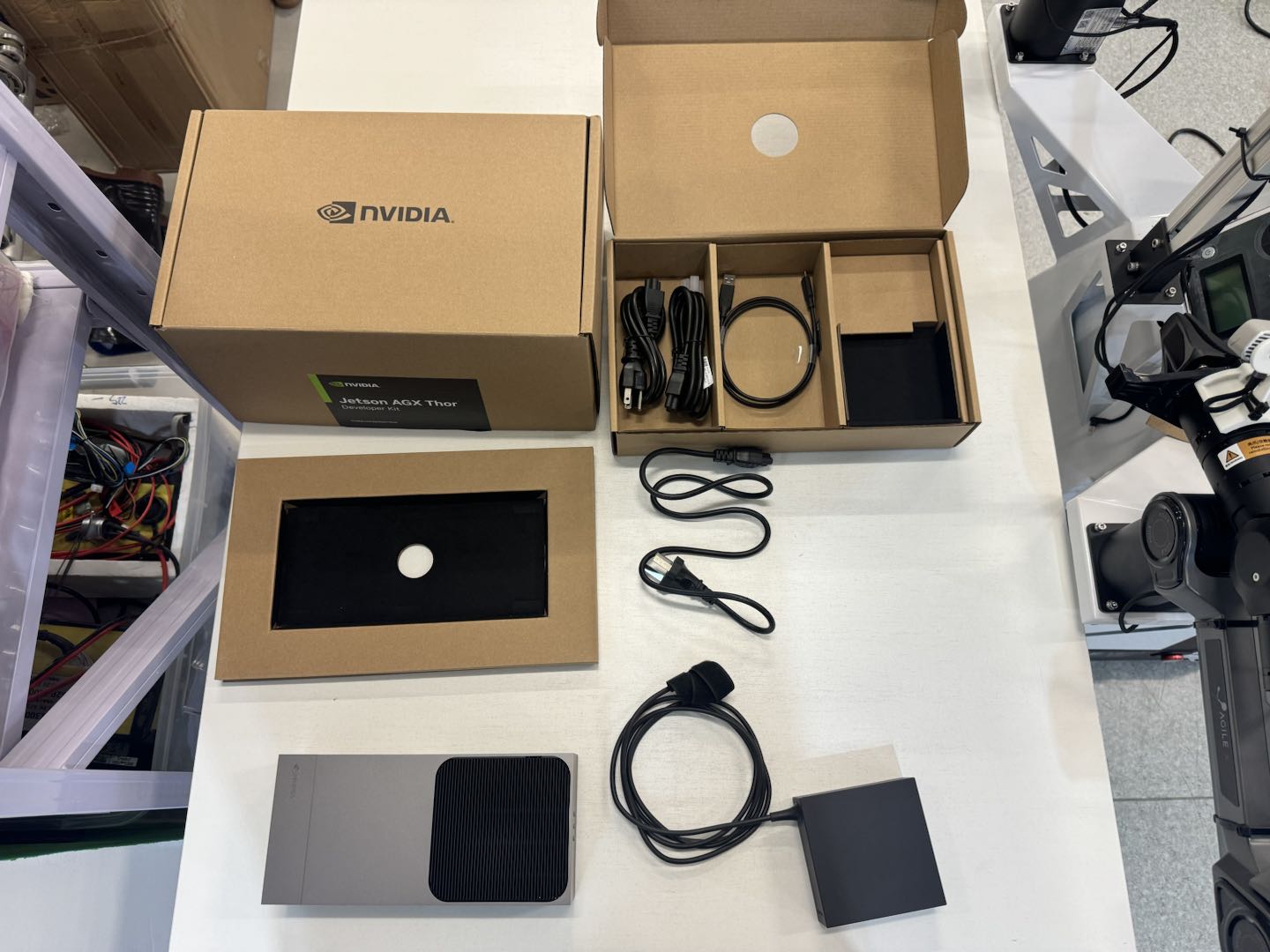
ボックスに含まれるハードウェアアイテムは、Thor ユニット1台と電源アダプターです:
Thor システムイメージの書き込み
2025年9月10日現在、Thor で利用可能な最新のシステムイメージバージョンは 38.2 です。Thor のシステムを再書き込みする必要がある場合は、このセクションの手順に従ってください。 書き込みに必要なアイテム:
- 25 GB 以上の利用可能なディスク容量を持つホストデバイス(Ubuntu または Windows OS サポート)
- 最低16 GB の容量を持つUSBドライブ
- モニターと DP/HDMI ディスプレイケーブル
- 240 W 以上を供給できる電源環境
- USB インターフェースを持つキーボード
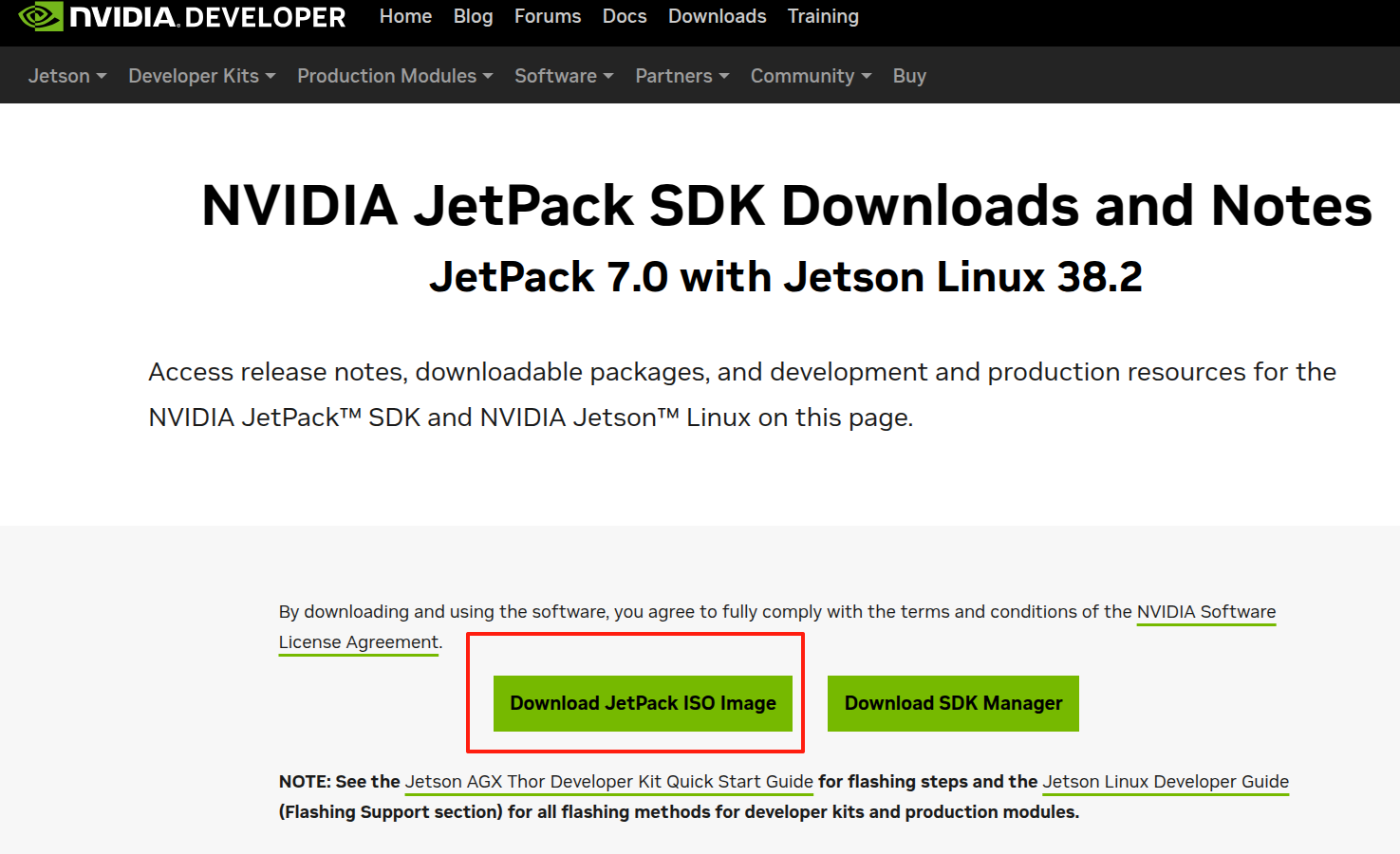
まず、NVIDIA公式ウェブサイトから Thor 用の ISO 形式システムイメージをダウンロードします。ダウンロードページにアクセスするにはこちらをクリックしてください:
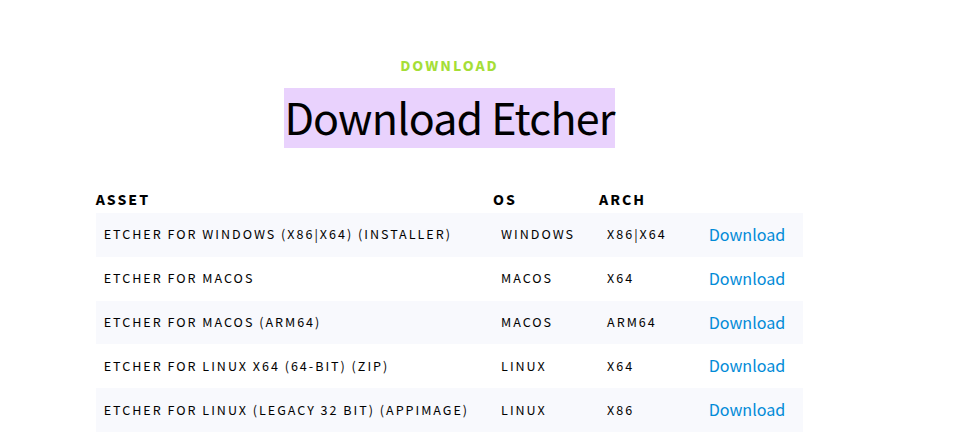
ホストマシンに Balena Etcher をインストールします。インストーラーをダウンロードするにはこちらをクリックし、ホストオペレーティングシステムに基づいて適切なバージョンを選択してください:
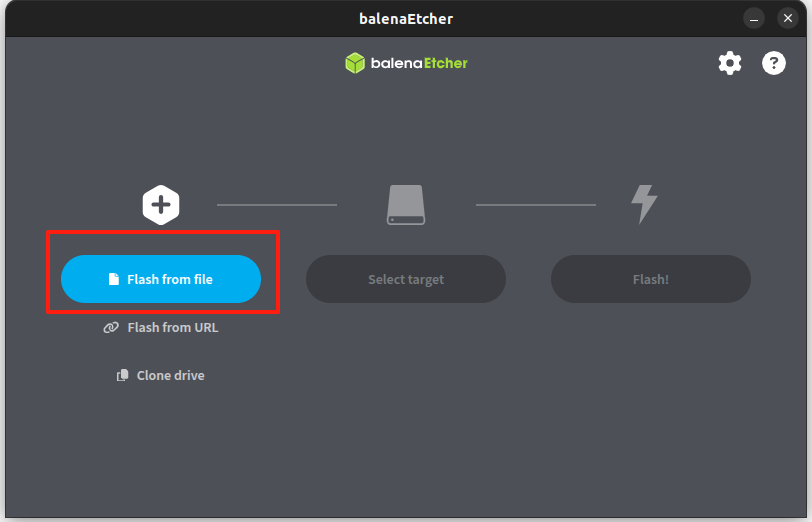
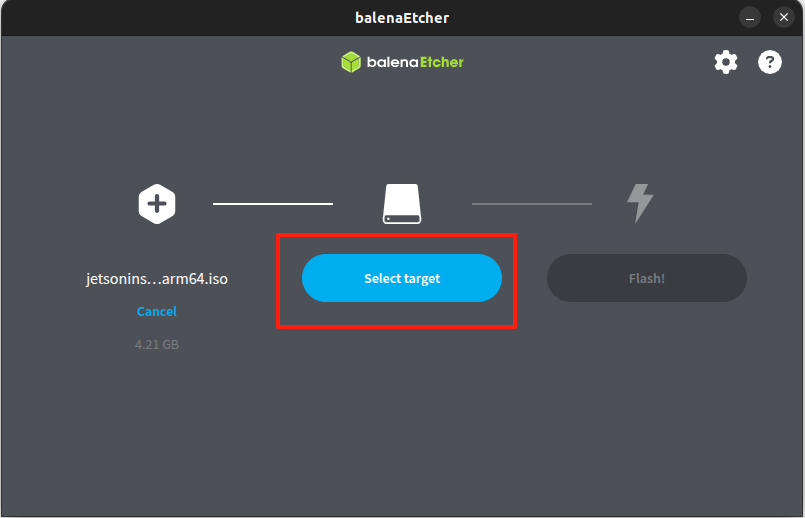
ISO イメージファイルをダウンロードし、Balena Etcher を正常にインストールした後、USB ドライブをホストマシンに挿入します。次に、Balena Etcher を起動して Thor 書き込み用のブータブル USB ドライブを作成します:
このプロセスは USB ドライブをフォーマットします。事前に重要なデータをバックアップしてください。
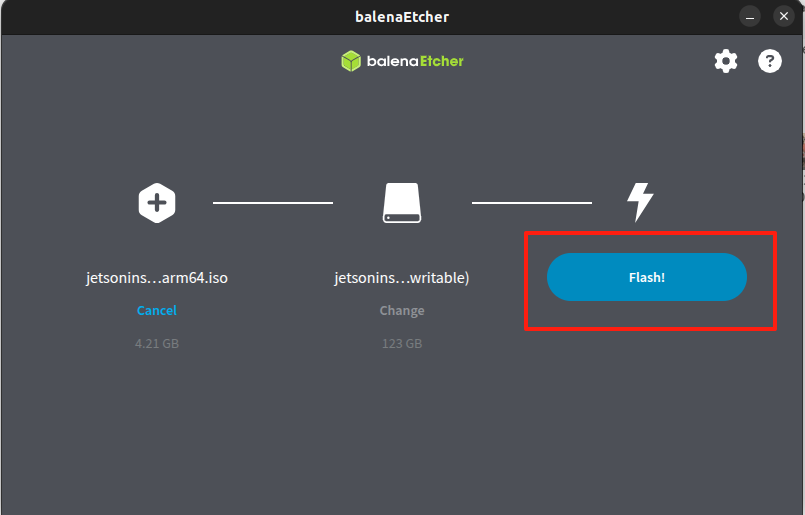
ローカルストレージからダウンロードした ISO イメージファイルを選択し、次にターゲットデバイス(つまり、USB ドライブ)を選択します。
ターゲットデバイス名とマウントディレクトリを慎重に確認してください! Flash! をクリックし、プロセスが完了するまで待ちます。完了すると、Thor にシステムを書き込むための USB ドライブの準備が整います:
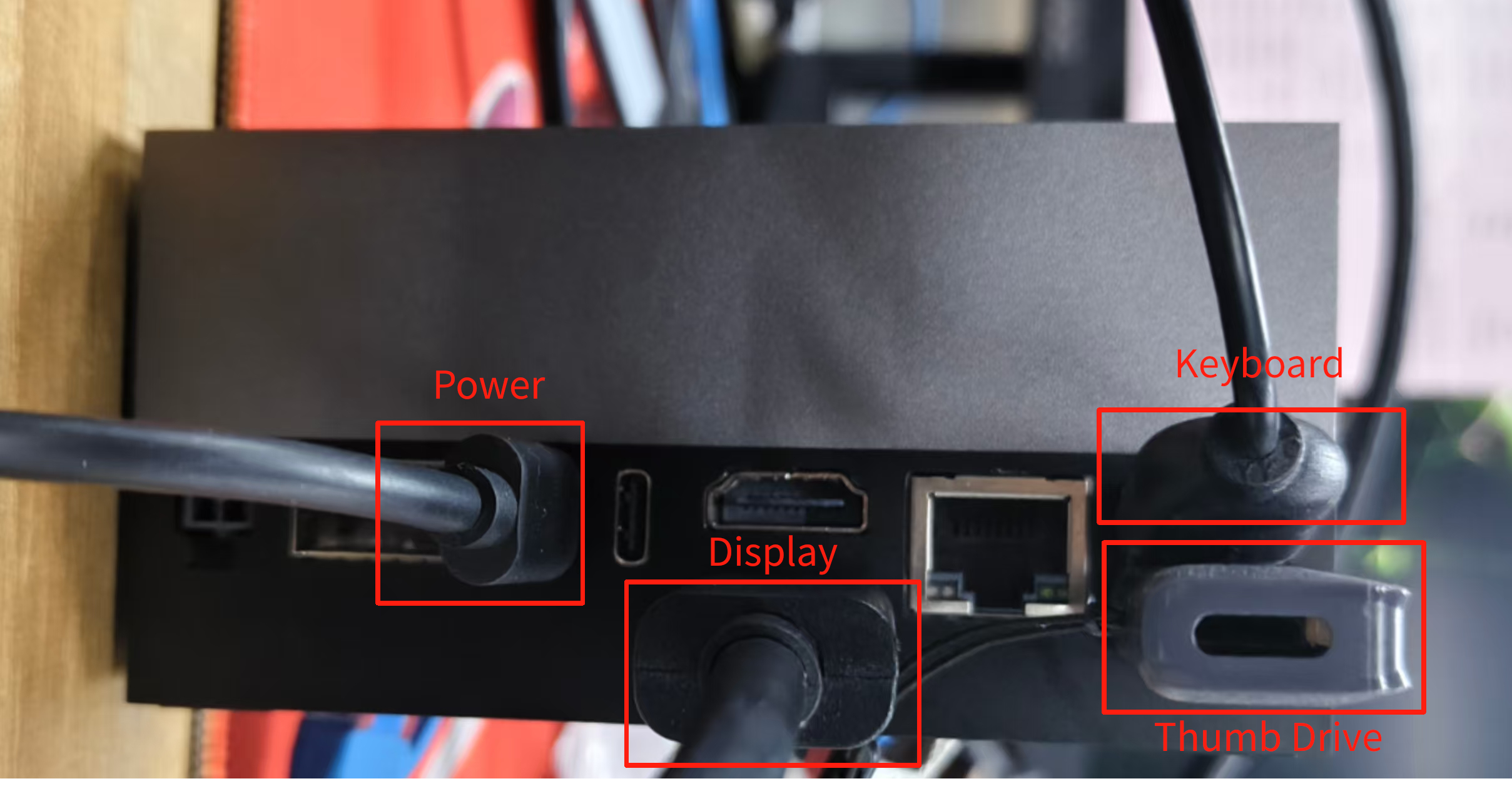
次に、準備した USB ドライブ、キーボード、ディスプレイケーブル(DP/HDMI)、電源(Type-C)を Thor ボードに挿入して書き込みプロセスを開始します。
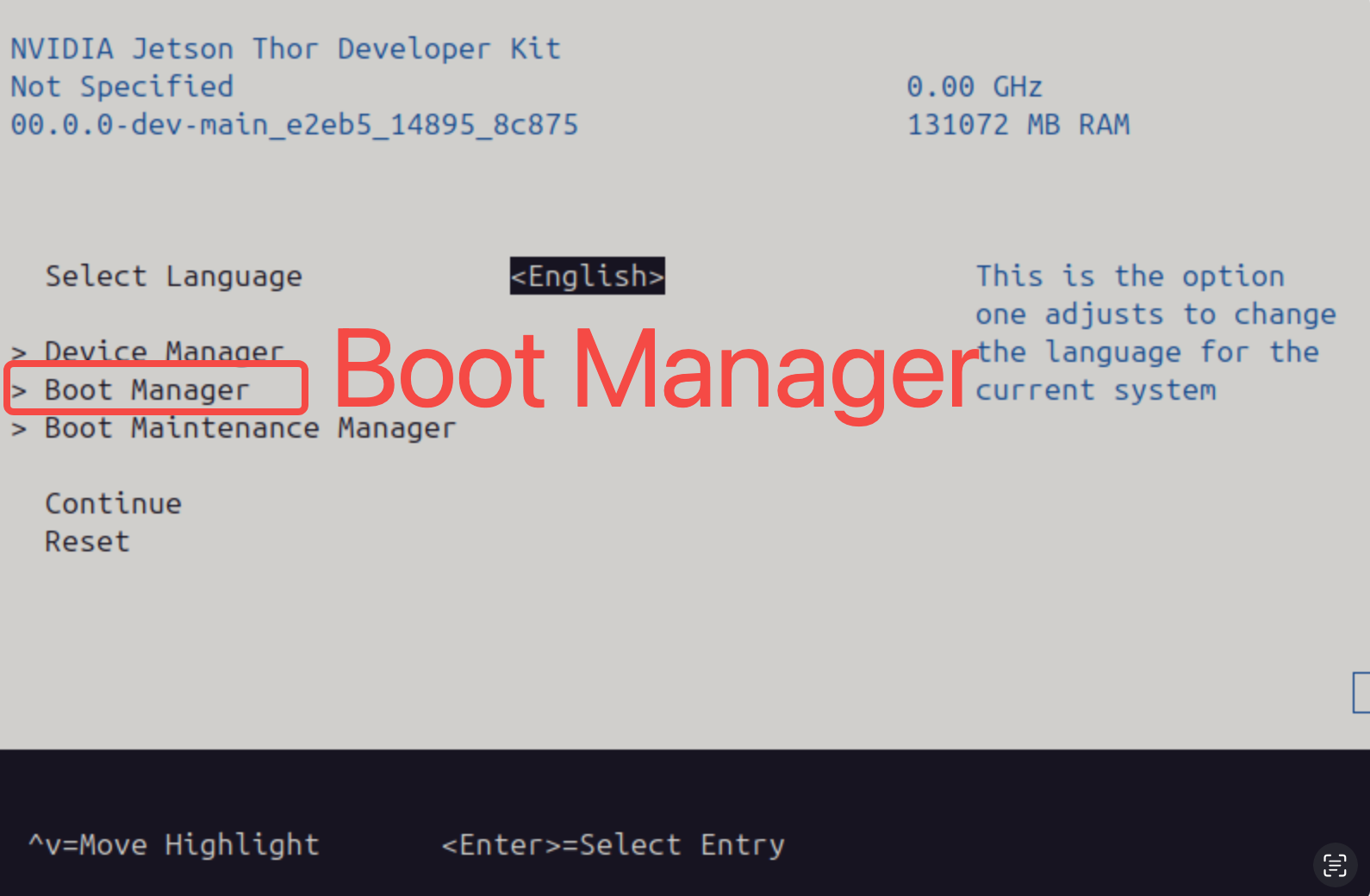
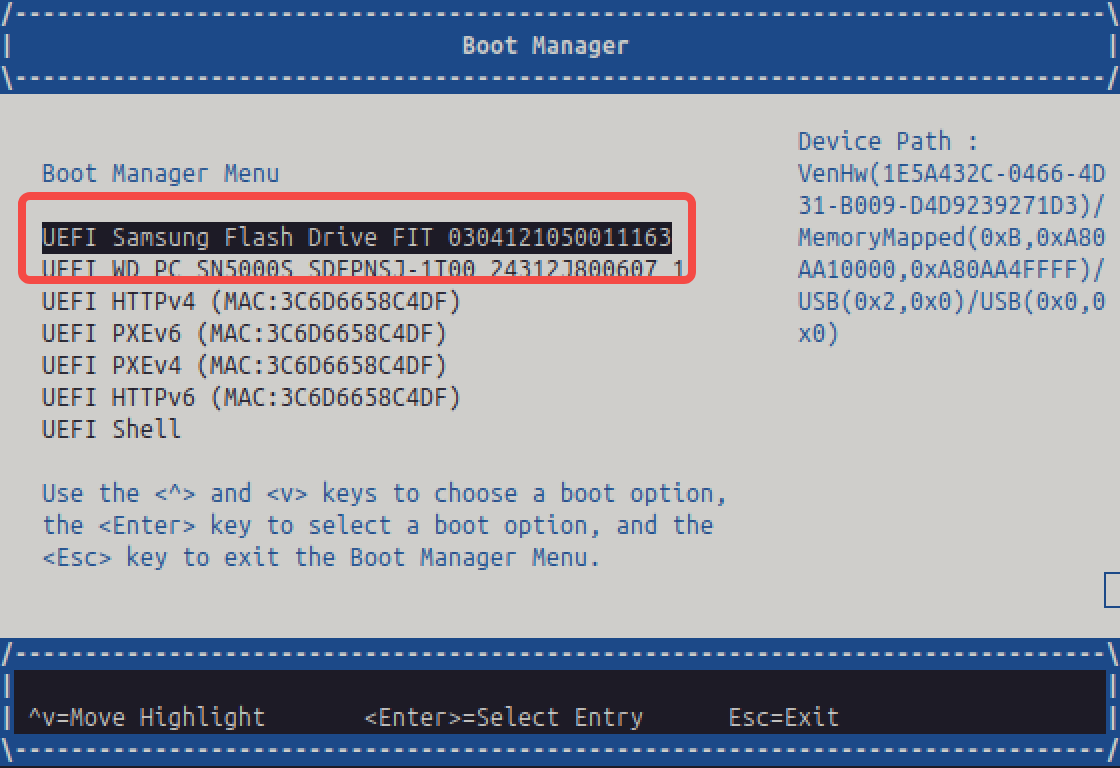
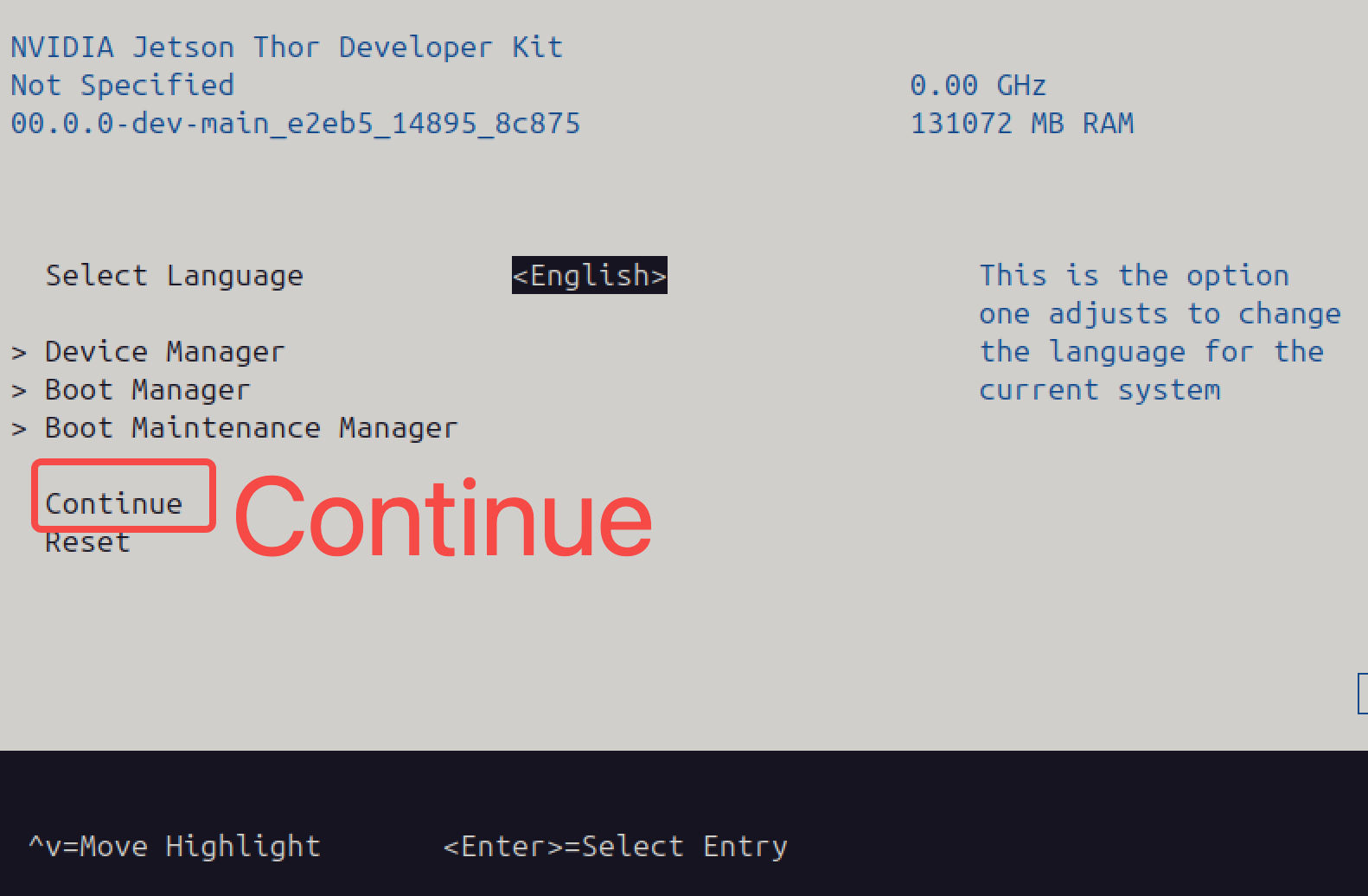
Thor の電源を入れ、ブートインターフェースに入ります。Boot Manager を選択し、次に Thor に挿入された USB ドライブ(USB ドライブ名に基づく)を選択します。Esc を押して前のメニューに戻り、Continue を選択します:
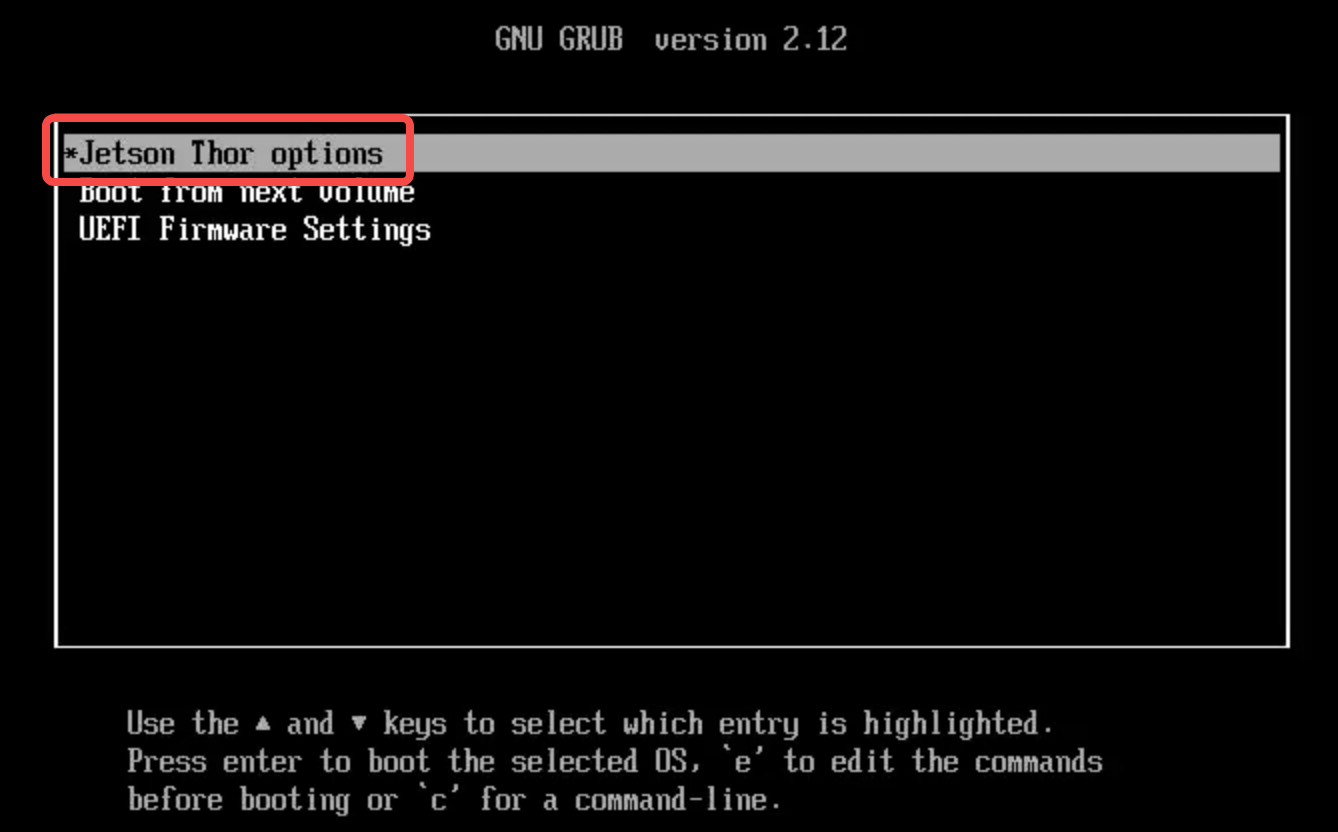
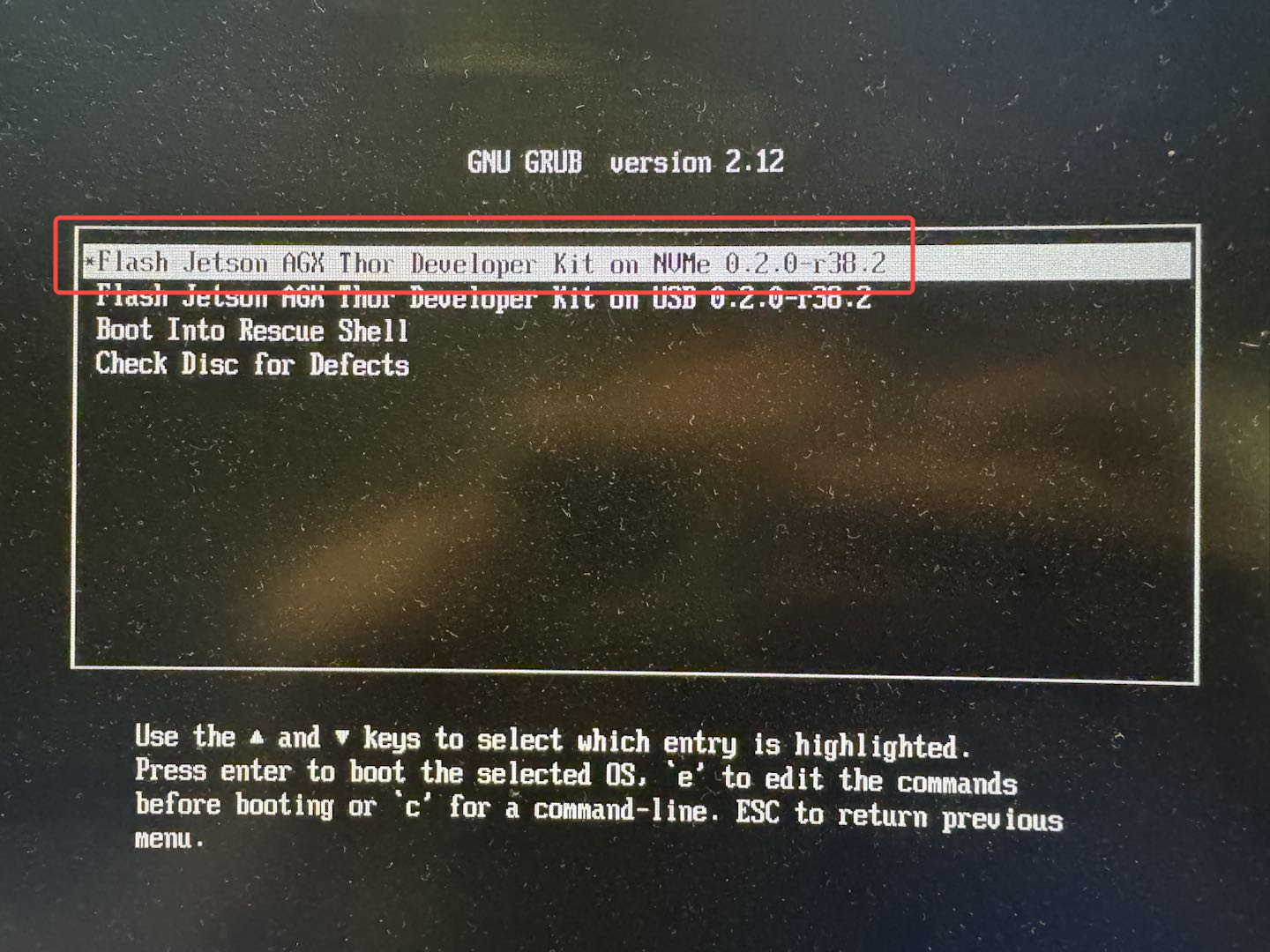
短い黒い画面の後、以下のインターフェースが表示されます。Jetson Thor options を選択して Enter を押します。次に、オプション
Flash Jetson AGX Thor Developer Kit on NVMe 0.2.0-r38.2 を選択して、システムイメージを Thor の NVMe ソリッドステートドライブに書き込みます:
大量のログ情報が画面に表示されます。約15分待ちます。この段階が完了すると、デバイスは自動的に再起動し、次のインターフェースに進みます。Update Progress バーが100%に達するまで待ちます。これは書き込みプロセスが正常に完了したことを示します:
書き込み後、初期システム設定を進めることができます:
このシステムイメージには、CUDA、TensorRT、またはJetPackの他のSDKコンポーネントは含まれていません。
Thor での基本開発環境セットアップ
このセクションでは、開発目的で Thor によく使用されるソフトウェア依存関係をインストールする方法の例を提供します。これらの依存関係は、後続の開発を促進することを目的としています。
リストされた依存関係は参考のみであることに注意してください。個々のプロジェクト要件に応じて追加のパッケージをインストールしてください。
必須開発依存関係のインストール
JetPack SDK インストール
ターミナルを開き、以下のコマンドを実行します。短時間待つと、CUDA、TensorRT、その他のSDKコンポーネントがインストールされます:
sudo apt update
sudo apt install nvidia-jetpack
ブラウザインストール
Firefox は Ubuntu 24.04 で安定して動作することがテストされ、確認されています:
sudo apt update
sudo apt install firefox
Jtop インストール
jtop をインストールするには、以下の手順を参照してください。
sudo apt update
sudo apt install python3
sudo apt install python3-pip
sudo pip3 install -U pip
sudo pip3 install jetson-stats
Miniconda インストール
Miniconda は開発環境を分離するために使用されます。miniconda をインストールするには、以下の手順を参照してください:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
conda --version
GPU版PyTorchのインストール
Thor でソースから GPU 版 PyTorch をコンパイルすると、互換性の問題が発生する可能性があります。便宜上、Thor で PyTorch 対応の開発環境を迅速にセットアップするのに役立つ、事前コンパイル済みの .whl ファイルを提供します。
ここでは、Thor に PyTorch 2.9 をインストールするための事前コンパイル済みホイールファイルを提供します。このファイルは Python 3.10 + CUDA 13 環境でコンパイルされました。
Python 3.10 + CUDA 13 pytorch2.9 をクリックして .whl ファイルをダウンロードしてください。
Python 3.10 + CUDA 13 torchvision0.24 をクリックして .whl ファイルをダウンロードしてください。
Python 3.10 + CUDA 13 torchvision0.23 をクリックして .whl ファイルをダウンロードしてください。
その他の Python 3.12 + CUDA 13 thor 用事前コンパイル済み依存関係 .whl ファイルは以下で見つけることができます:
https://pypi.jetson-ai-lab.io/sbsa/cu130。
期待されるホイールファイルが利用できない場合、開発者は開発環境のセットアップを完了するために必要な依存関係を自分でビルドする必要があります。
追加依存関係のインストール
このドキュメントでは、開発者が Jetson AGX Thor 開発環境に迅速に適応できるよう支援するリファレンス Docker イメージを提供します。 このイメージは参考のみであり、開発者は特定のニーズに基づいて使用するかどうかを自由に選択できます。
イメージサイズが40 GBを超えるため、サーバーからのダウンロードは比較的遅くなります。
この Docker イメージは GR00T N1.5 推論を安定して実行できます。イメージ内の pip list コマンドの出力は以下の通りです:
pip.list
Package Version Location Installer Editable project location
------------------------- ----------------- ---------------- -------------------------------------- -------------------------
absl-py 2.3.1 /opt/venv/lib/python3.12/site-packages pip
accelerate 1.2.1 /opt/venv/lib/python3.12/site-packages pip
aiohappyeyeballs 2.6.1 /opt/venv/lib/python3.12/site-packages pip
aiohttp 3.12.15 /opt/venv/lib/python3.12/site-packages pip
aiosignal 1.4.0 /opt/venv/lib/python3.12/site-packages pip
albucore 0.0.17 /opt/venv/lib/python3.12/site-packages pip
albumentations 1.4.18 /opt/venv/lib/python3.12/site-packages pip
annotated-types 0.7.0 /opt/venv/lib/python3.12/site-packages pip
antlr4-python3-runtime 4.9.3 /opt/venv/lib/python3.12/site-packages pip
anyio 4.10.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi 25.1.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi-bindings 25.1.0 /opt/venv/lib/python3.12/site-packages pip
arrow 1.3.0 /opt/venv/lib/python3.12/site-packages pip
asttokens 3.0.0 /opt/venv/lib/python3.12/site-packages pip
astunparse 1.6.3 /opt/venv/lib/python3.12/site-packages pip
async-lru 2.0.5 /opt/venv/lib/python3.12/site-packages pip
attrs 23.2.0 /usr/lib/python3/dist-packages debian
av 12.3.0 /opt/venv/lib/python3.12/site-packages pip
babel 2.17.0 /opt/venv/lib/python3.12/site-packages pip
beautifulsoup4 4.13.5 /opt/venv/lib/python3.12/site-packages pip
bleach 6.2.0 /opt/venv/lib/python3.12/site-packages pip
blessings 1.7 /opt/venv/lib/python3.12/site-packages pip
blinker 1.9.0 /opt/venv/lib/python3.12/site-packages pip
certifi 2025.8.3 /opt/venv/lib/python3.12/site-packages pip
cffi 2.0.0 /opt/venv/lib/python3.12/site-packages pip
charset-normalizer 3.4.3 /opt/venv/lib/python3.12/site-packages pip
click 8.2.1 /opt/venv/lib/python3.12/site-packages pip
cloudpickle 3.1.1 /opt/venv/lib/python3.12/site-packages pip
cmake 3.31.6 /opt/venv/lib/python3.12/site-packages pip
comm 0.2.3 /opt/venv/lib/python3.12/site-packages pip
contourpy 1.3.3 /opt/venv/lib/python3.12/site-packages pip
cramjam 2.11.0 /opt/venv/lib/python3.12/site-packages pip
cryptography 41.0.7 /usr/lib/python3/dist-packages debian
cuda-bindings 13.0.0 /opt/venv/lib/python3.12/site-packages pip
cuda-core 0.3.2 /opt/venv/lib/python3.12/site-packages pip
cuda-pathfinder 1.2.2 /opt/venv/lib/python3.12/site-packages pip
cycler 0.12.1 /opt/venv/lib/python3.12/site-packages pip
Cython 3.1.3 /opt/venv/lib/python3.12/site-packages pip
datasets 4.0.0 /opt/venv/lib/python3.12/site-packages pip
dbus-python 1.3.2 /usr/lib/python3/dist-packages
debugpy 1.8.16 /opt/venv/lib/python3.12/site-packages pip
decorator 5.2.1 /opt/venv/lib/python3.12/site-packages pip
decord 0.6.0 /opt/venv/lib/python3.12/site-packages pip
deepdiff 8.6.1 /opt/venv/lib/python3.12/site-packages pip
defusedxml 0.7.1 /opt/venv/lib/python3.12/site-packages pip
devscripts 2.23.7 /usr/lib/python3/dist-packages
diffusers 0.36.0.dev0 /opt/venv/lib/python3.12/site-packages pip
dill 0.3.8 /opt/venv/lib/python3.12/site-packages pip
distro 1.9.0 /usr/lib/python3/dist-packages debian
dm-tree 0.1.8 /opt/venv/lib/python3.12/site-packages pip
docker-pycreds 0.4.0 /opt/venv/lib/python3.12/site-packages pip
docstring_parser 0.17.0 /opt/venv/lib/python3.12/site-packages pip
docutils 0.22 /opt/venv/lib/python3.12/site-packages pip
draccus 0.11.5 /opt/venv/lib/python3.12/site-packages pip
einops 0.8.1 /opt/venv/lib/python3.12/site-packages pip
eval_type_backport 0.2.2 /opt/venv/lib/python3.12/site-packages pip
evdev 1.9.2 /opt/venv/lib/python3.12/site-packages pip
executing 2.2.1 /opt/venv/lib/python3.12/site-packages pip
Farama-Notifications 0.0.4 /opt/venv/lib/python3.12/site-packages pip
fastjsonschema 2.21.2 /opt/venv/lib/python3.12/site-packages pip
fastparquet 2024.11.0 /opt/venv/lib/python3.12/site-packages pip
feetech-servo-sdk 1.0.0 /opt/venv/lib/python3.12/site-packages pip
filelock 3.19.1 /opt/venv/lib/python3.12/site-packages pip
flash_attn 2.8.4 /opt/venv/lib/python3.12/site-packages pip
Flask 3.1.2 /opt/venv/lib/python3.12/site-packages pip
flatbuffers 25.2.10 /opt/venv/lib/python3.12/site-packages pip
fonttools 4.59.2 /opt/venv/lib/python3.12/site-packages pip
fqdn 1.5.1 /opt/venv/lib/python3.12/site-packages pip
frozenlist 1.7.0 /opt/venv/lib/python3.12/site-packages pip
fsspec 2025.3.0 /opt/venv/lib/python3.12/site-packages pip
gast 0.6.0 /opt/venv/lib/python3.12/site-packages pip
gitdb 4.0.12 /opt/venv/lib/python3.12/site-packages pip
GitPython 3.1.45 /opt/venv/lib/python3.12/site-packages pip
google-pasta 0.2.0 /opt/venv/lib/python3.12/site-packages pip
grpcio 1.74.0 /opt/venv/lib/python3.12/site-packages pip
gymnasium 1.0.0 /opt/venv/lib/python3.12/site-packages pip
h11 0.16.0 /opt/venv/lib/python3.12/site-packages pip
h5py 3.12.1 /opt/venv/lib/python3.12/site-packages pip
hf-xet 1.1.9 /opt/venv/lib/python3.12/site-packages pip
httpcore 1.0.9 /opt/venv/lib/python3.12/site-packages pip
httplib2 0.20.4 /usr/lib/python3/dist-packages
httpx 0.28.1 /opt/venv/lib/python3.12/site-packages pip
huggingface-hub 0.34.4 /opt/venv/lib/python3.12/site-packages pip
hydra-core 1.3.2 /opt/venv/lib/python3.12/site-packages pip
id 1.5.0 /opt/venv/lib/python3.12/site-packages pip
idna 3.10 /opt/venv/lib/python3.12/site-packages pip
imageio 2.34.2 /opt/venv/lib/python3.12/site-packages pip
importlib_metadata 8.7.0 /opt/venv/lib/python3.12/site-packages pip
iniconfig 2.1.0 /opt/venv/lib/python3.12/site-packages pip
inquirerpy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
iopath 0.1.9 /opt/venv/lib/python3.12/site-packages pip
ipykernel 6.30.1 /opt/venv/lib/python3.12/site-packages pip
ipython 9.5.0 /opt/venv/lib/python3.12/site-packages pip
ipython_pygments_lexers 1.1.1 /opt/venv/lib/python3.12/site-packages pip
ipywidgets 8.1.7 /opt/venv/lib/python3.12/site-packages pip
isoduration 20.11.0 /opt/venv/lib/python3.12/site-packages pip
itsdangerous 2.2.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.classes 3.4.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.context 6.0.1 /opt/venv/lib/python3.12/site-packages pip
jaraco.functools 4.3.0 /opt/venv/lib/python3.12/site-packages pip
jedi 0.19.2 /opt/venv/lib/python3.12/site-packages pip
jeepney 0.9.0 /opt/venv/lib/python3.12/site-packages pip
Jinja2 3.1.6 /opt/venv/lib/python3.12/site-packages pip
json5 0.12.1 /opt/venv/lib/python3.12/site-packages pip
jsonlines 4.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonpointer 3.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonschema 4.25.1 /opt/venv/lib/python3.12/site-packages pip
jsonschema-specifications 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
jupyter 1.1.1 /opt/venv/lib/python3.12/site-packages pip
jupyter_client 8.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter-console 6.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter_core 5.8.1 /opt/venv/lib/python3.12/site-packages pip
jupyter-events 0.12.0 /opt/venv/lib/python3.12/site-packages pip
jupyter-lsp 2.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server 2.17.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server_terminals 0.5.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab 4.4.7 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_myst 2.4.2 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_pygments 0.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_server 2.27.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_widgets 3.0.15 /opt/venv/lib/python3.12/site-packages pip
keras 3.11.3 /opt/venv/lib/python3.12/site-packages pip
keyring 25.6.0 /opt/venv/lib/python3.12/site-packages pip
kiwisolver 1.4.9 /opt/venv/lib/python3.12/site-packages pip
kornia 0.7.4 /opt/venv/lib/python3.12/site-packages pip
kornia_rs 0.1.9 /opt/venv/lib/python3.12/site-packages pip
lark 1.2.2 /opt/venv/lib/python3.12/site-packages pip
launchpadlib 1.11.0 /usr/lib/python3/dist-packages
lazr.restfulclient 0.14.6 /usr/lib/python3/dist-packages
lazr.uri 1.0.6 /usr/lib/python3/dist-packages
lazy_loader 0.4 /opt/venv/lib/python3.12/site-packages pip
lerobot 0.3.4 /opt/lerobot /opt/venv/lib/python3.12/site-packages pip
libclang 18.1.1 /opt/venv/lib/python3.12/site-packages pip
llvmlite 0.44.0 /opt/venv/lib/python3.12/site-packages pip
lockfile 0.12.2 /opt/venv/lib/python3.12/site-packages pip
Mako 1.3.10 /opt/venv/lib/python3.12/site-packages pip
Markdown 3.9 /opt/venv/lib/python3.12/site-packages pip
markdown-it-py 4.0.0 /opt/venv/lib/python3.12/site-packages pip
MarkupSafe 3.0.2 /opt/venv/lib/python3.12/site-packages pip
matplotlib 3.10.0 /opt/venv/lib/python3.12/site-packages pip
matplotlib-inline 0.1.7 /opt/venv/lib/python3.12/site-packages pip
mdurl 0.1.2 /opt/venv/lib/python3.12/site-packages pip
mergedeep 1.3.4 /opt/venv/lib/python3.12/site-packages pip
mistune 3.1.4 /opt/venv/lib/python3.12/site-packages pip
ml_dtypes 0.5.3 /opt/venv/lib/python3.12/site-packages pip
more-itertools 10.8.0 /opt/venv/lib/python3.12/site-packages pip
mpmath 1.3.0 /opt/venv/lib/python3.12/site-packages pip
msgpack 1.1.1 /opt/venv/lib/python3.12/site-packages pip
multidict 6.6.4 /opt/venv/lib/python3.12/site-packages pip
multiprocess 0.70.16 /opt/venv/lib/python3.12/site-packages pip
mypy_extensions 1.1.0 /opt/venv/lib/python3.12/site-packages pip
namex 0.1.0 /opt/venv/lib/python3.12/site-packages pip
nbclient 0.10.2 /opt/venv/lib/python3.12/site-packages pip
nbconvert 7.16.6 /opt/venv/lib/python3.12/site-packages pip
nbformat 5.10.4 /opt/venv/lib/python3.12/site-packages pip
nest-asyncio 1.6.0 /opt/venv/lib/python3.12/site-packages pip
networkx 3.5 /opt/venv/lib/python3.12/site-packages pip
nh3 0.3.0 /opt/venv/lib/python3.12/site-packages pip
ninja 1.13.0 /opt/venv/lib/python3.12/site-packages pip
notebook 7.4.5 /opt/venv/lib/python3.12/site-packages pip
notebook_shim 0.2.4 /opt/venv/lib/python3.12/site-packages pip
numba 0.61.2 /opt/venv/lib/python3.12/site-packages pip
numpy 2.3.3 /opt/venv/lib/python3.12/site-packages pip
numpydantic 1.6.7 /opt/venv/lib/python3.12/site-packages pip
nvtx 0.2.13 /opt/venv/lib/python3.12/site-packages pip
oauthlib 3.2.2 /usr/lib/python3/dist-packages
omegaconf 2.3.0 /opt/venv/lib/python3.12/site-packages pip
onnx 1.17.0 /opt/venv/lib/python3.12/site-packages pip
opencv-contrib-python 4.13.0 /opt/venv/lib/python3.12/site-packages pip
opencv-python 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opencv-python-headless 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opt_einsum 3.4.0 /opt/venv/lib/python3.12/site-packages pip
optimum 1.27.0 /opt/venv/lib/python3.12/site-packages pip
optree 0.17.0 /opt/venv/lib/python3.12/site-packages pip
orderly-set 5.5.0 /opt/venv/lib/python3.12/site-packages pip
packaging 25.0 /opt/venv/lib/python3.12/site-packages pip
pandas 2.2.3 /opt/venv/lib/python3.12/site-packages pip
pandocfilters 1.5.1 /opt/venv/lib/python3.12/site-packages pip
parso 0.8.5 /opt/venv/lib/python3.12/site-packages pip
peft 0.17.0 /opt/venv/lib/python3.12/site-packages pip
pettingzoo 1.25.0 /opt/venv/lib/python3.12/site-packages pip
pexpect 4.9.0 /opt/venv/lib/python3.12/site-packages pip
pfzy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
pid 3.0.4 /opt/venv/lib/python3.12/site-packages pip
pillow 11.3.0 /opt/venv/lib/python3.12/site-packages pip
pip 25.2 /opt/venv/lib/python3.12/site-packages pip
pkginfo 1.12.1.2 /opt/venv/lib/python3.12/site-packages pip
platformdirs 4.4.0 /opt/venv/lib/python3.12/site-packages pip
pluggy 1.6.0 /opt/venv/lib/python3.12/site-packages pip
portalocker 3.2.0 /opt/venv/lib/python3.12/site-packages pip
prometheus_client 0.22.1 /opt/venv/lib/python3.12/site-packages pip
prompt_toolkit 3.0.52 /opt/venv/lib/python3.12/site-packages pip
propcache 0.3.2 /opt/venv/lib/python3.12/site-packages pip
protobuf 6.32.0 /opt/venv/lib/python3.12/site-packages pip
psutil 7.0.0 /opt/venv/lib/python3.12/site-packages pip
ptyprocess 0.7.0 /opt/venv/lib/python3.12/site-packages pip
pure_eval 0.2.3 /opt/venv/lib/python3.12/site-packages pip
pyarrow 21.0.0 /opt/venv/lib/python3.12/site-packages pip
pycparser 2.23 /opt/venv/lib/python3.12/site-packages pip
pycuda 2025.1.1 /opt/venv/lib/python3.12/site-packages pip
pydantic 2.10.6 /opt/venv/lib/python3.12/site-packages pip
pydantic_core 2.27.2 /opt/venv/lib/python3.12/site-packages pip
Pygments 2.19.2 /opt/venv/lib/python3.12/site-packages pip
PyGObject 3.48.2 /usr/lib/python3/dist-packages
PyJWT 2.7.0 /usr/lib/python3/dist-packages debian
pynput 1.8.1 /opt/venv/lib/python3.12/site-packages pip
pyparsing 3.1.1 /usr/lib/python3/dist-packages debian
pyrsistent 0.20.0 /usr/lib/python3/dist-packages
pyserial 3.5 /opt/venv/lib/python3.12/site-packages pip
pytest 8.4.2 /opt/venv/lib/python3.12/site-packages pip
python-apt 2.7.7+ubuntu5 /usr/lib/python3/dist-packages
python-daemon 3.1.2 /opt/venv/lib/python3.12/site-packages pip
python-dateutil 2.9.0.post0 /opt/venv/lib/python3.12/site-packages pip
python-json-logger 3.3.0 /opt/venv/lib/python3.12/site-packages pip
python-xlib 0.33 /opt/venv/lib/python3.12/site-packages pip
pytools 2025.2.4 /opt/venv/lib/python3.12/site-packages pip
pytorch3d 0.7.8 /opt/venv/lib/python3.12/site-packages pip
pytz 2025.2 /opt/venv/lib/python3.12/site-packages pip
PyYAML 6.0.2 /opt/venv/lib/python3.12/site-packages pip
pyyaml-include 1.4.1 /opt/venv/lib/python3.12/site-packages pip
pyzmq 27.1.0 /opt/venv/lib/python3.12/site-packages pip
ray 2.40.0 /opt/venv/lib/python3.12/site-packages pip
readme_renderer 44.0 /opt/venv/lib/python3.12/site-packages pip
referencing 0.36.2 /opt/venv/lib/python3.12/site-packages pip
regex 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
requests 2.32.3 /opt/venv/lib/python3.12/site-packages pip
requests-toolbelt 1.0.0 /opt/venv/lib/python3.12/site-packages pip
rerun-sdk 0.24.1 /opt/venv/lib/python3.12/site-packages pip
rfc3339-validator 0.1.4 /opt/venv/lib/python3.12/site-packages pip
rfc3986 2.0.0 /opt/venv/lib/python3.12/site-packages pip
rfc3986-validator 0.1.1 /opt/venv/lib/python3.12/site-packages pip
rfc3987-syntax 1.1.0 /opt/venv/lib/python3.12/site-packages pip
rich 14.1.0 /opt/venv/lib/python3.12/site-packages pip
rpds-py 0.27.1 /opt/venv/lib/python3.12/site-packages pip
safetensors 0.6.2 /opt/venv/lib/python3.12/site-packages pip
scikit-build 0.18.1 /opt/venv/lib/python3.12/site-packages pip
scikit-image 0.25.2 /opt/venv/lib/python3.12/site-packages pip
scipy 1.16.1 /opt/venv/lib/python3.12/site-packages pip
SecretStorage 3.4.0 /opt/venv/lib/python3.12/site-packages pip
semantic-version 2.10.0 /opt/venv/lib/python3.12/site-packages pip
Send2Trash 1.8.3 /opt/venv/lib/python3.12/site-packages pip
sentencepiece 0.2.1 /opt/venv/lib/python3.12/site-packages pip
sentry-sdk 2.37.1 /opt/venv/lib/python3.12/site-packages pip
service 0.6.0 /opt/venv/lib/python3.12/site-packages pip
setproctitle 1.3.7 /opt/venv/lib/python3.12/site-packages pip
setuptools 80.9.0 /opt/venv/lib/python3.12/site-packages pip
setuptools-rust 1.12.0 /opt/venv/lib/python3.12/site-packages pip
shtab 1.7.2 /opt/venv/lib/python3.12/site-packages pip
siphash24 1.8 /opt/venv/lib/python3.12/site-packages pip
six 1.16.0 /usr/lib/python3/dist-packages
smmap 5.0.2 /opt/venv/lib/python3.12/site-packages pip
sniffio 1.3.1 /opt/venv/lib/python3.12/site-packages pip
soupsieve 2.8 /opt/venv/lib/python3.12/site-packages pip
stack-data 0.6.3 /opt/venv/lib/python3.12/site-packages pip
sympy 1.14.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard-data-server 0.7.2 /opt/venv/lib/python3.12/site-packages pip
tensorflow 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorrt 10.13.2.6 /opt/venv/lib/python3.12/site-packages pip
termcolor 3.1.0 /opt/venv/lib/python3.12/site-packages pip
terminado 0.18.1 /opt/venv/lib/python3.12/site-packages pip
tf_keras 2.20.1 /opt/venv/lib/python3.12/site-packages pip
tianshou 0.5.1 /opt/venv/lib/python3.12/site-packages pip
tifffile 2025.9.9 /opt/venv/lib/python3.12/site-packages pip
timm 1.0.14 /opt/venv/lib/python3.12/site-packages pip
tinycss2 1.4.0 /opt/venv/lib/python3.12/site-packages pip
tokenizers 0.21.4 /opt/venv/lib/python3.12/site-packages pip
toml 0.10.2 /opt/venv/lib/python3.12/site-packages pip
torch 2.9.0 /opt/venv/lib/python3.12/site-packages pip
torchvision 0.24.0 /opt/venv/lib/python3.12/site-packages pip
tornado 6.5.2 /opt/venv/lib/python3.12/site-packages pip
tqdm 4.67.1 /opt/venv/lib/python3.12/site-packages pip
traitlets 5.14.3 /opt/venv/lib/python3.12/site-packages pip
transformers 4.51.3 /opt/venv/lib/python3.12/site-packages pip
triton 3.5.0+gite3b8f77a /opt/venv/lib/python3.12/site-packages pip
twine 6.2.0 /opt/venv/lib/python3.12/site-packages pip
typeguard 4.4.2 /opt/venv/lib/python3.12/site-packages pip
types-python-dateutil 2.9.0.20250822 /opt/venv/lib/python3.12/site-packages pip
typing_extensions 4.12.2 /opt/venv/lib/python3.12/site-packages pip
typing-inspect 0.9.0 /opt/venv/lib/python3.12/site-packages pip
tyro 0.9.17 /opt/venv/lib/python3.12/site-packages pip
tzdata 2025.2 /opt/venv/lib/python3.12/site-packages pip
uri-template 1.3.0 /opt/venv/lib/python3.12/site-packages pip
urllib3 2.5.0 /opt/venv/lib/python3.12/site-packages pip
uv 0.8.16 /opt/venv/lib/python3.12/site-packages pip
wadllib 1.3.6 /usr/lib/python3/dist-packages
wandb 0.18.0 /opt/venv/lib/python3.12/site-packages pip
wcwidth 0.2.13 /opt/venv/lib/python3.12/site-packages pip
webcolors 24.11.1 /opt/venv/lib/python3.12/site-packages pip
webencodings 0.5.1 /opt/venv/lib/python3.12/site-packages pip
websocket-client 1.8.0 /opt/venv/lib/python3.12/site-packages pip
Werkzeug 3.1.3 /opt/venv/lib/python3.12/site-packages pip
wheel 0.45.1 /opt/venv/lib/python3.12/site-packages pip
widgetsnbextension 4.0.14 /opt/venv/lib/python3.12/site-packages pip
wrapt 1.17.3 /opt/venv/lib/python3.12/site-packages pip
xxhash 3.5.0 /opt/venv/lib/python3.12/site-packages pip
yarl 1.20.1 /opt/venv/lib/python3.12/site-packages pip
zipp 3.23.0 /opt/venv/lib/python3.12/site-packages pip
このイメージは Docker Hub から直接プルでき、PyTorch、TensorRT、FlashAttention などの一般的に使用される依存関係が含まれています:
docker pull johnnync/isaac-gr00t:r38.2.arm64-sbsa-cu130-24.04
この Docker イメージは ACT モデル推論用の LeRobot スクリプトの呼び出しをサポートしていません。完全な LeRobot スクリプトスイートを実行する必要がある場合は、このイメージ外の環境を使用してください。
Thor で Docker を実行するには、以下のコマンドを参照してください。your_docker_img:tag を Docker イメージ名とタグに置き換えるか、イメージ ID を使用してください:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
your_docker_img:tag
SO-ARM を使用したデータ収集
データ収集の詳細なチュートリアルについては、以下のリンクを参照してください:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#record-the-dataset
このリンクには、構成、組み立て、キャリブレーション、データ収集、トレーニング、推論をカバーする SO-ARM の完全なチュートリアルが含まれています。
lerobot ロボットアームのデータ収集は、PC または Jetson デバイス上で直接実行できます。
- 方法 1:Jetson を使用してデータを収集
- 方法 2:Ubuntu PC を使用してデータを収集
データ収集手順は両方の方法で基本的に同じです。
Jetson は同じ帯域幅要件を持つ 2 台の USB カメラを同時にストリーミングできない場合があります。2 台の USB カメラを接続する場合は、異なる USB ハブチップに接続する必要があります!
Thor で 2 台の USB カメラを同時にストリーミングするには、1 台のカメラを USB-A ポートに接続した後、USB Type-C ポート経由で接続された外部 USB ハブも使用する必要があります。これにより、2 台目の USB カメラが Thor 内の異なる USB ハブコントローラーにマウントされることが保証されます。 互換性のある USB Type-C ハブの例を以下に示します:

USB Type-C ドックは、周辺機器が適切に機能するように、Thor の特定のポートに接続する必要があります。以下に示すとおりです:

Lerobot 環境セットアップ(オプション)
Lerobot の開発環境セットアップ手順は、以下のリンクのサブセクションで確認できます:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#install-lerobot
モーターの設定
SO-ARM の各関節のモーターは、組み立て前に設定する必要があります。設定手順は、以下のリンクのサブセクションで確認できます:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#configure-the-motors
組み立て
SO-ARM のマスターアームとフォロワーアームのインストール手順は、以下のリンクのサブセクションで確認できます:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#assembly
SO-ARM キャリブレーション
SO-ARM が完全に組み立てられた後、キャリブレーションが必要です。キャリブレーション手順については、以下のリンクのサブセクションを参照してください:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#calibrate
ロボットアームをキャリブレーションする際は、USB カメラを接続しないでください。ポートの競合や不正なポート割り当てが発生する可能性があります。
キャリブレーションスクリプトを実行した後、ロボットアームの各関節を手動で動かして、完全な可動域に到達することを確認してください!これを行わないと、テレオペレーション中にリーダーアームとフォロワーアームの姿勢が一致しない可能性があります。
カメラの追加
一般的に、ロボットアームの手首/グリッパーに 1 台のカメラを設置し、デスクトップ表面にもう 1 台のカメラを設置して、アームの姿勢を適切にカバーすることが推奨されます。 具体的な設置方法はアプリケーションシナリオによって異なります。以下に示す例は参考用です。
詳細については、以下のリンクのサブセクションを参照してください:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#add-cameras
データ収集
カメラの設置とロボットアームのキャリブレーションの両方が完了した後、データセット収集手順は以下のリンクのサブセクションで確認できます:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#record-the-dataset
収集したデータの可視化
SO-ARM で収集したデータを可視化するには、以下のリンクのサブセクションを参照してください:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#visualize-the-dataset
ポリシートレーニング
収集したデータに基づいて、ポリシーをトレーニングする手順は以下のリンクのサブセクションで確認できます:
https://wiki.seeedstudio.com/ja/lerobot_so100m_new/#train-a-policy
以下のセクションでは、クラウドベースのトレーニングプラットフォームを紹介し、基本的な使用方法を説明します。リモートサーバーでより効率的にトレーニングを完了することを選択できます。
クラウドでポリシーをトレーニングすることを選択した場合は、データセットが事前にクラウドサーバーにアップロードされているか、Hugging Face Hub からダウンロードされていることを確認してください。ただし、Hugging Face Hub から直接ダウンロードする際の潜在的なネットワーク問題のため、データセットをクラウドサーバーに手動でアップロードすることを強く推奨します。
NVIDIA Brev を使用したポリシートレーニング
NVIDIA Brev は、人気のクラウドプラットフォーム上の NVIDIA GPU インスタンスへの合理化されたアクセス、自動環境セットアップ、柔軟なデプロイメントオプションを提供し、開発者が即座に実験を開始できるようにします。
プラットフォームアクセス URL: https://login.brev.nvidia.com/signin
プラットフォームを使用するにはアカウントを登録する必要があります。このセクションでは、トレーニングプラットフォームの基本的な使用方法を紹介します。
クラウドベーストレーニングプラットフォームの有効化
ステップバイステップの手順
- クラウドサーバーインスタンスの作成 - ステップ 1
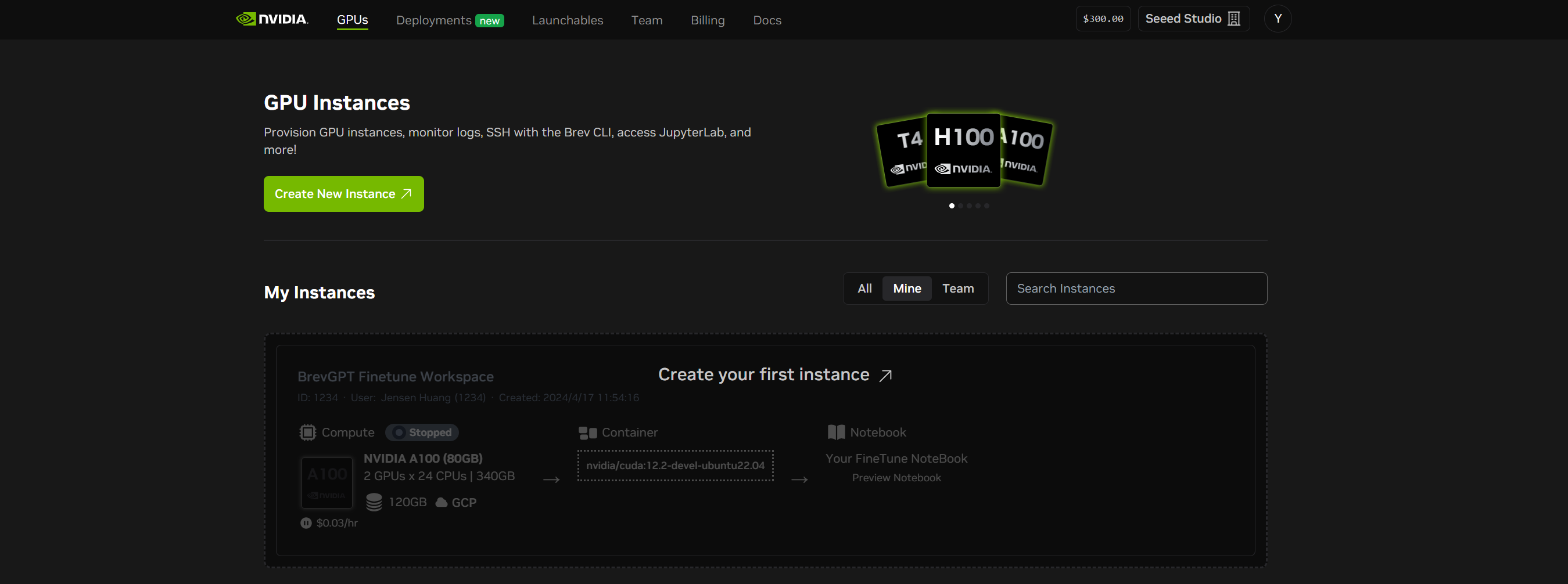
- クラウドサーバーインスタンスの作成 - ステップ 2
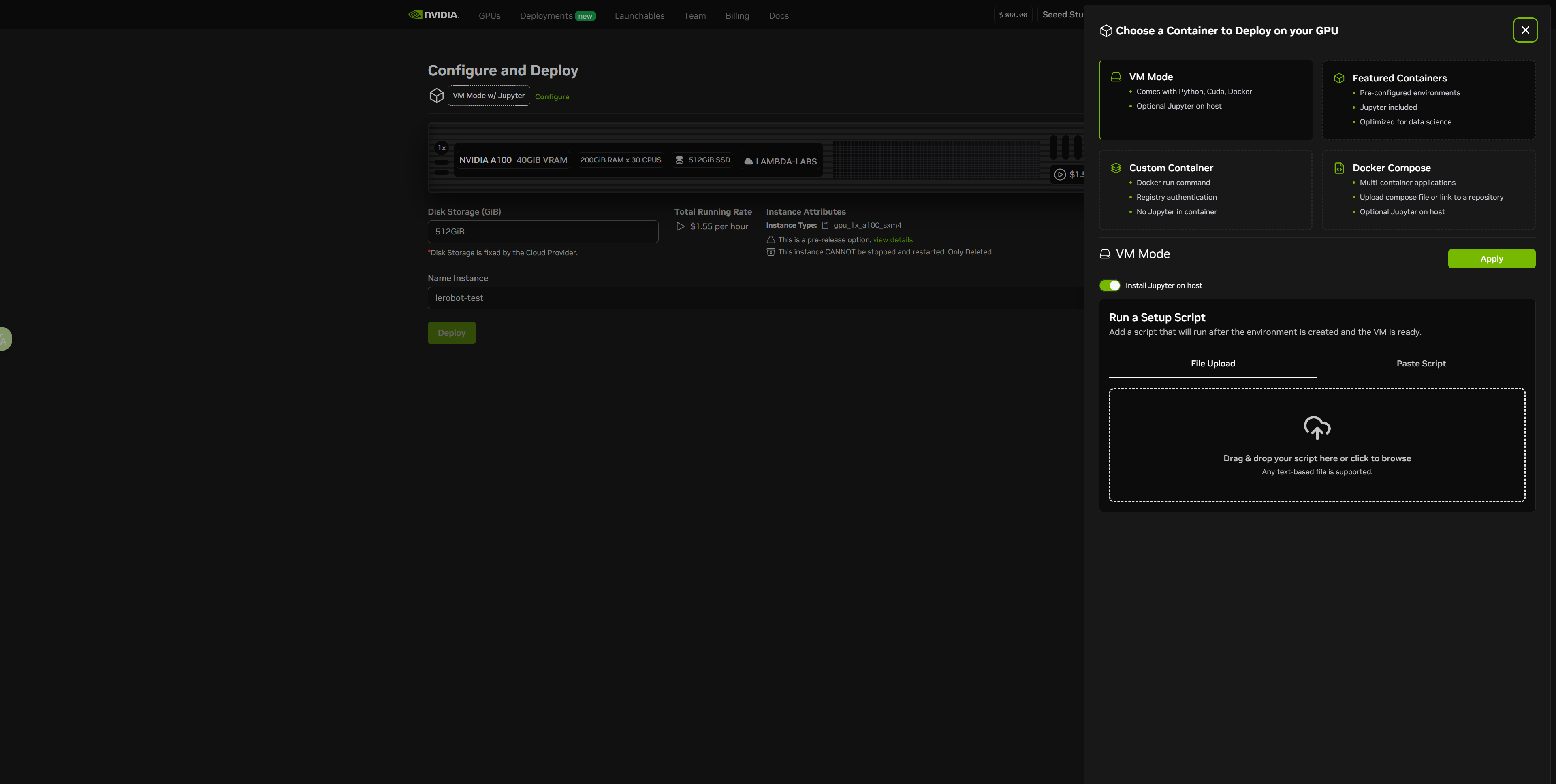
- クラウドサーバーインスタンスの作成 - ステップ 3
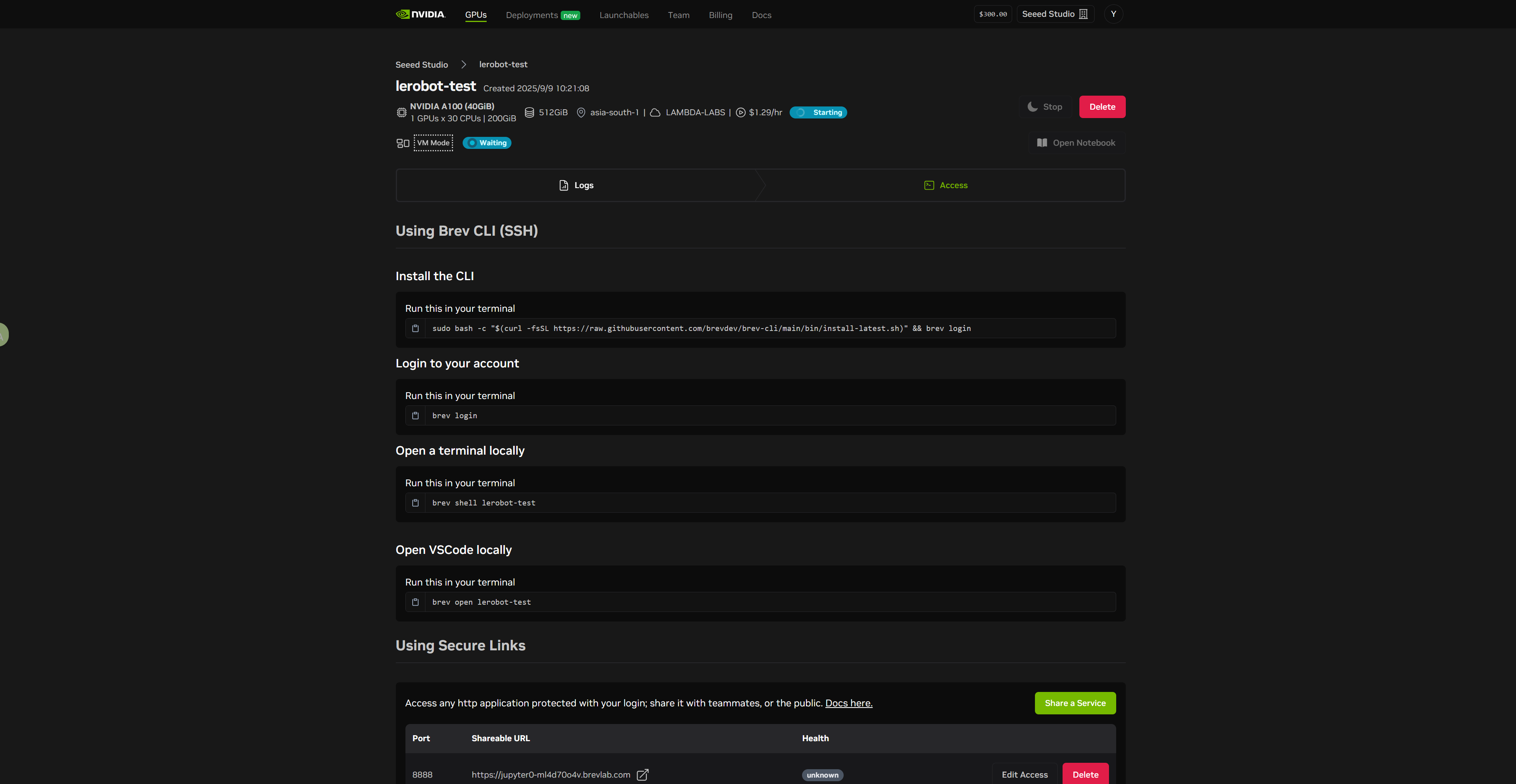
ウェブベース Jupyter Notebook の起動:

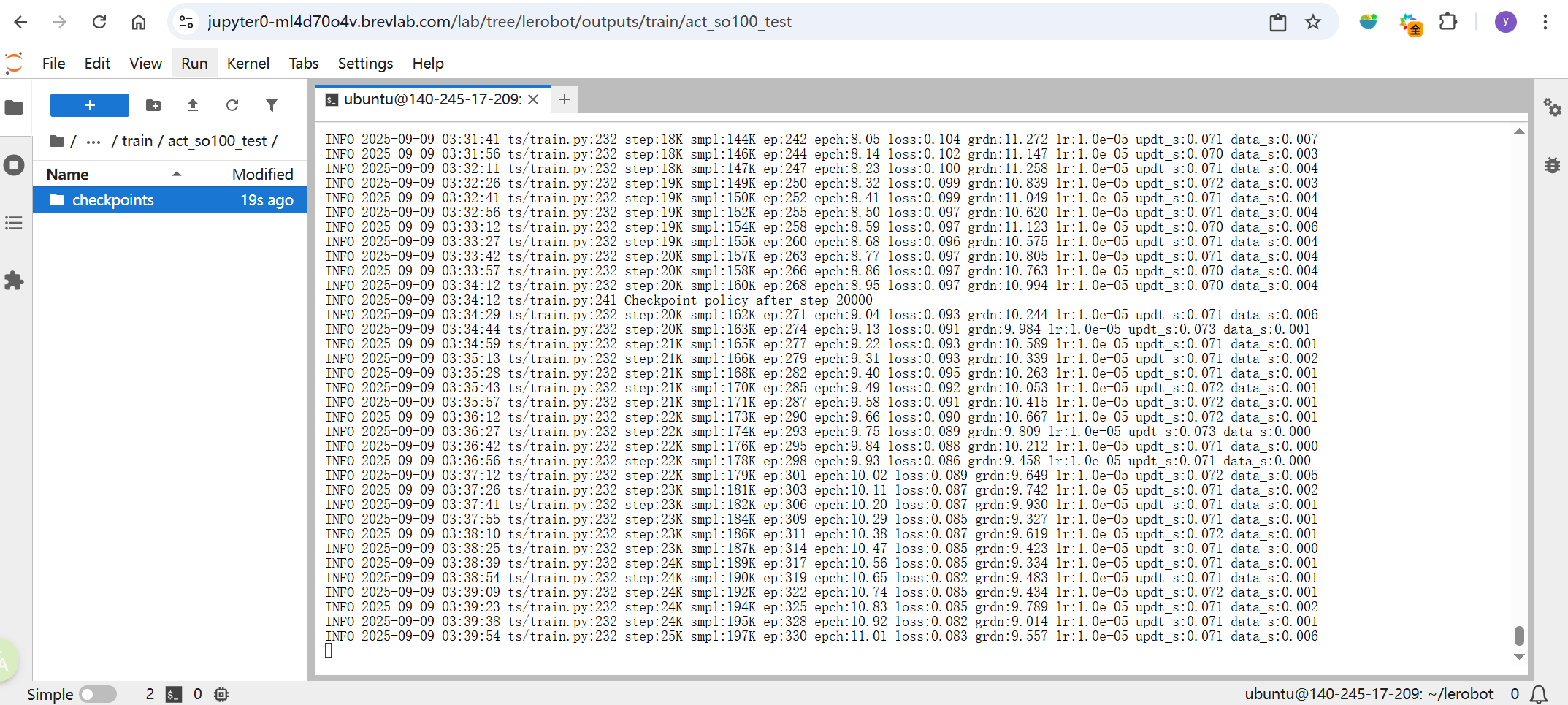
モデルのトレーニングとサーバーからのエクスポート
開発者はノートブックターミナル内で直接モデルをトレーニングできます。以下は GR00T N1.5 をトレーニングし、その後サーバーからエクスポートする例です。
サーバーに Conda をインストール:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
source ~/miniconda3/bin/activate
conda init --all
Isaac-GR00T リポジトリのクローン:
git clone https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
gr00t 環境の作成:
conda create -n gr00t python=3.10
conda activate gr00t
pip install --upgrade setuptools
pip install -e .[base]
pip install --no-build-isolation flash-attn==2.7.1.post4
クラウドプラットフォームで GR00T をトレーニングまたはファインチューニングする場合は、Ampere 以降のアーキテクチャを持つ GPU(例:RTX A6000 または GeForce RTX 4090)を使用する必要があります。V100(Volta)は GR00T のトレーニングまたはファインチューニングではサポートされていません。
モデルのファインチューニングの詳細については、以下を参照してください: https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning#:~:text=1.2%20Configure%20Modality%20File
GR00T N1.5 モデルのファインチューニング:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
デフォルトのファインチューニング設定には約 25G の VRAM が必要です。それだけの VRAM がない場合は、gr00t_finetune.py スクリプトに --no-tune_diffusion_model フラグを追加してみてください。
サーバーで Gr00t をトレーニングまたはファインチューニングしたい場合は、このリンクを参照してください。
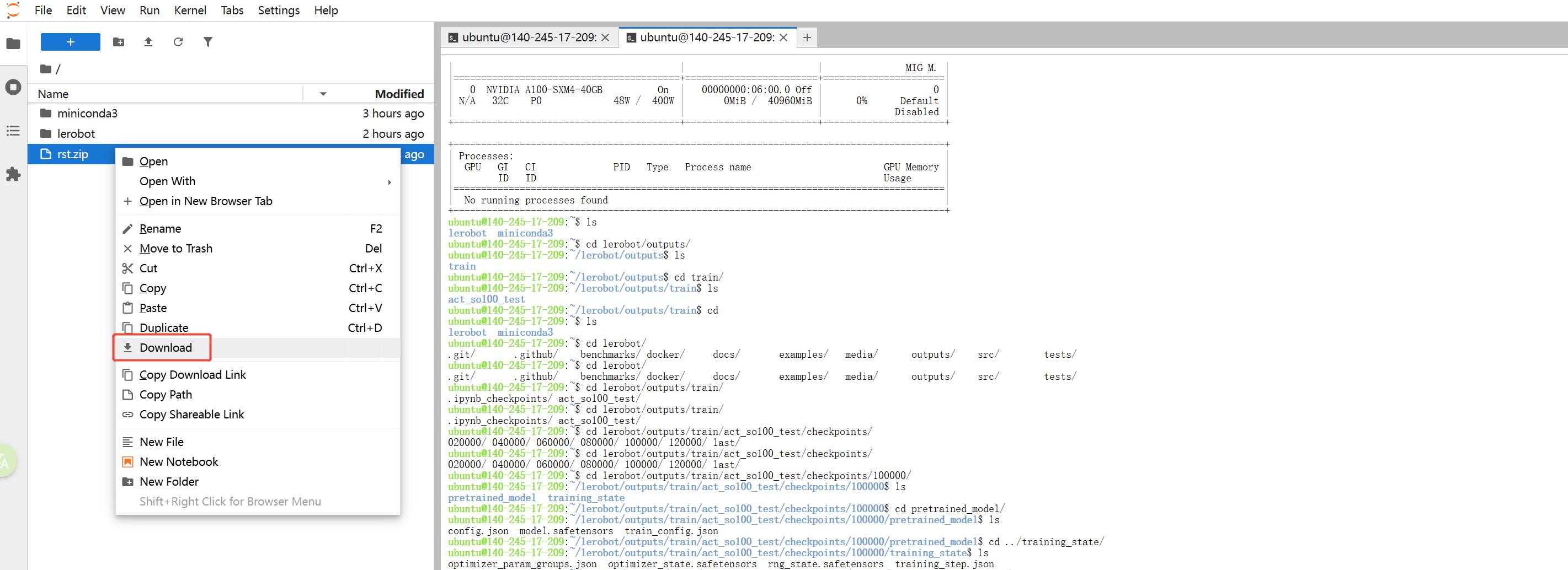
トレーニングが完了した後、モデルをローカルマシンにダウンロードしたい場合があります。しかし、Jupyter Notebook サイドバーはモデルトレーニングフォルダーへの直接ナビゲーションをサポートしていません。
解決策は次のとおりです:まず対象フォルダーを .zip または .tar.gz アーカイブに圧縮し、次にノートブックインターフェースを通じてアーカイブファイルをダウンロードします。例については以下の図を参照してください。
Thor での Isaac GR00T N1.5 推論
Jetson AGX Thor は、強力なエッジコンピューティングおよびデプロイメントプラットフォームとして、大規模モデル推論をサポートするのに十分なリソースを提供します。このセクションでは、前述の内容に基づいて、Thor で GR00T N1.5 の推論を実行する方法を説明します。
GR00T N1.5は、ロボット学習分野においてNVIDIA Researchがリリースしたオープンソースのベースラインシステムです。特に大規模モデル駆動の模倣学習とポリシー学習に焦点を当てた、エンボディードAIの訓練と推論のための統一フレームワークの提供を目的としています。
準備
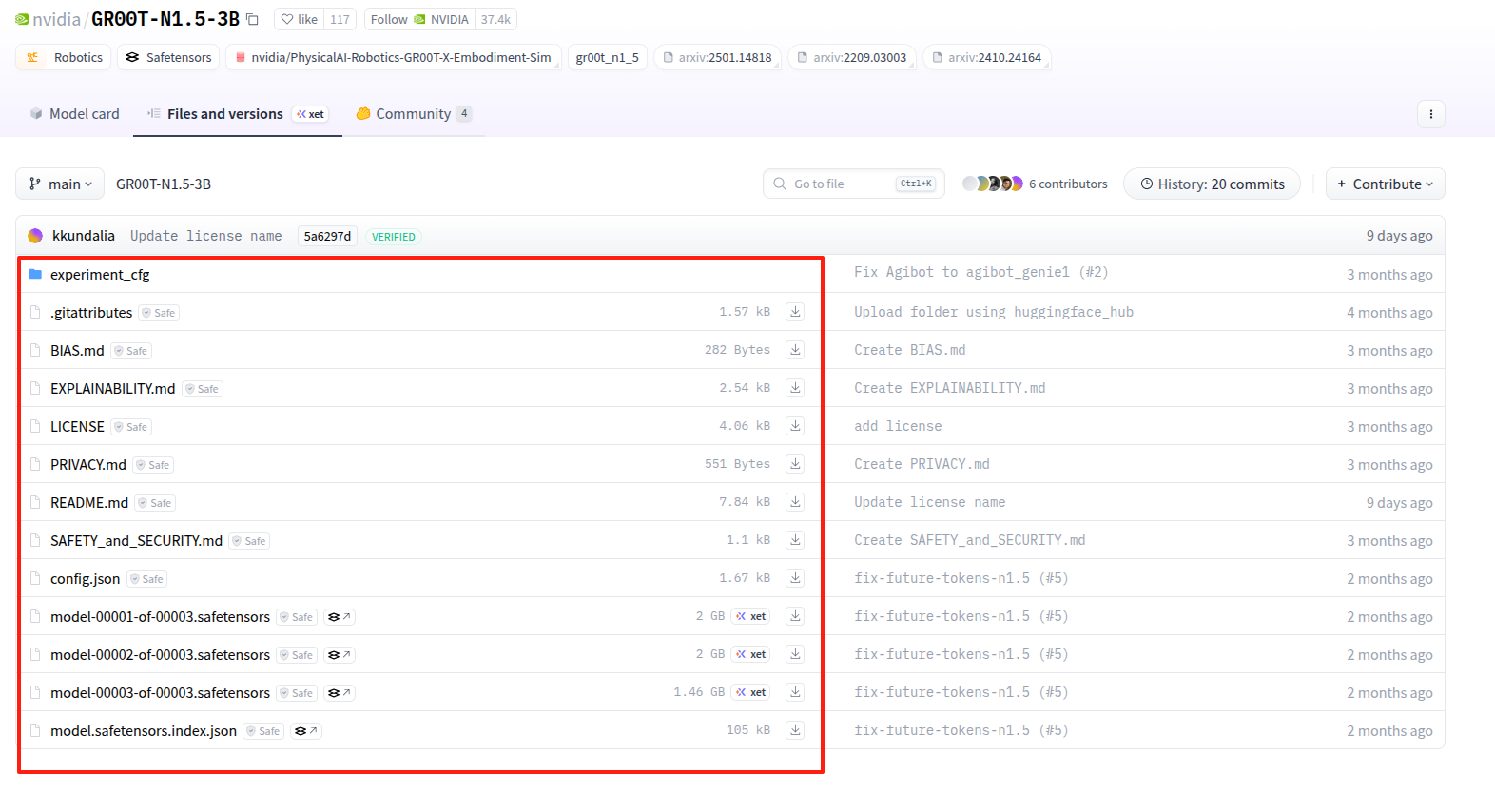
GR00T N1.5の事前訓練済みモデルはHugging Faces経由で利用可能です。以下のリンクからダウンロードできます:
https://huggingface.co/nvidia/GR00T-N1.5-3B/tree/main
GR00T推論に必要なすべての依存関係は、専用のDockerイメージに事前設定されています。
以下のコマンドを使用してコンテナを起動します:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
lerobot:r38.2.aarch64-cu130-24.04
Gr00tのソースコードをgit cloneし、インストールします:
git clone https://github.com/NVIDIA/Isaac-GR00T.git
cd Isaac-GR00T
pip install --upgrade setuptools
pip install -e .[thor]
Gr00tは、lerobotフレームワークを使用して収集されたデータセットと完全に互換性があります。Gr00tモデルのファインチューニング用にデータセットを準備するには、前の「データ収集」セクションを参照してください。
モデルファインチューニング(オプション)
NVIDIA BrevでGR00T N1.5のファインチューニングを既に実行している場合は、Thorでのこのステップをスキップできます。
ファインチューニングプロセスは、提供されたクラウド訓練プラットフォームまたはThor上のDockerコンテナ内で直接実行できます。
事前訓練済みのGR00Tモデルをダウンロードしておらず、カスタムバージョンを使用する予定がない場合は、以下のコマンドを使用してHugging Faceの重みに基づいてファインチューニングを行うことができます:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
このスクリプトは、Hugging Faceから事前訓練済みのGR00Tモデルを自動的にダウンロードし、ファインチューニングプロセスを開始します。
ローカルに保存された事前訓練済みのGR00Tモデルを使用したい場合は、以下のようにコマンドを変更してください:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av \
--base-model-path ./pretrained/GR00T-N1.5-3
--dataset-pathは、SO-ARMからの収集データのファイルパスです。
デフォルトのファインチューニング設定には約25GのVRAMが必要です。十分なVRAMがない場合は、gr00t_finetune.pyスクリプトに--no-tune_diffusion_modelフラグを追加してみてください。
GR00T N1.5での推論実行
最適なパフォーマンスを実現するために、ファインチューニングされたGR00Tモデルをデプロイする際は、データ収集時に使用された実世界のセットアップをできるだけ忠実に再現することを推奨します。これは、モデルの汎化能力が限定的であるためです。

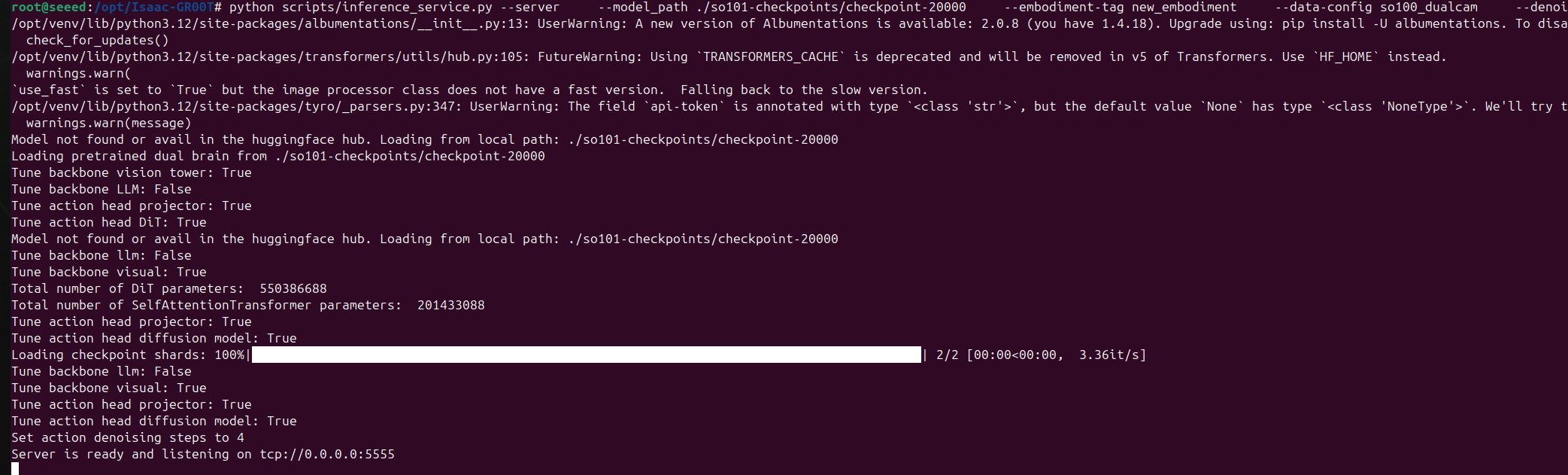
Dockerコンテナ内でターミナルを開き、GR00T推論サービスを起動します:
python scripts/inference_service.py --server \
--model_path ./so101-checkpoints \
--embodiment-tag new_embodiment \
--data-config so100_dualcam \
--denoising-steps 4
起動が成功すると、ターミナルに以下のようなログが表示されます:
別のターミナルを開き、以下のコマンドを使用して異なるシェルから同じコンテナに入ります:
sudo docker exec -it <container id> /bin/bahs
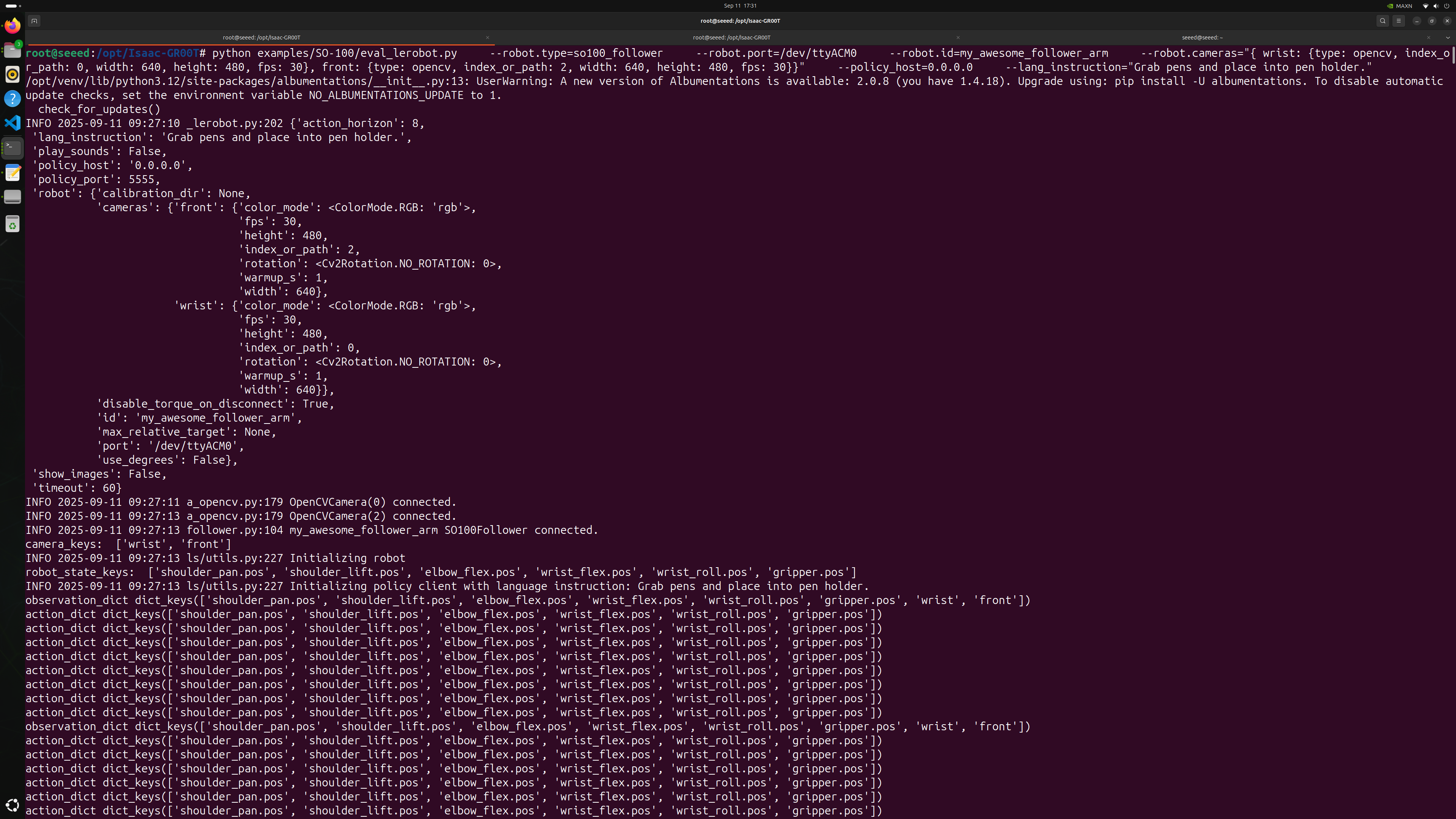
次に、この2番目のシェルで推論クライアントを開始します:
python examples/SO-100/eval_lerobot.py \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ wrist: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30}, front: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" \
--policy_host=0.0.0.0 \
--lang_instruction="Grab pens and place into pen holder."
index_or_pathをカメラのインデックス番号に置き換えてください。ls /dev/video*を実行することで確認できます。
クライアントプロセスが正常に開始されると、以下の出力が表示されます:
クライアントプロセスの初回実行時には、アームのサーボを校正する必要があります。校正プロセスは前述の通りです。
適切なテレオペレーションと推論動作を確保するために、各関節が可動域全体を動くことを確認してください。
すべてが設定されると、GR00T N1.5をJetson AGX Thorに正常にデプロイできます。システムとハードウェア環境が完全な推論をサポートすることが確認されました:
FAQ
Q1: クラウド訓練プラットフォームでBrev CLIツールが動作しない?
これは多くの場合、ネットワークの問題が原因です。
ローカルのUbuntuホストにBrev CLIをインストールしてログインし、ローカルターミナルからSSHを使用してクラウドインスタンスに接続を試みてください。
Q2: 訓練プラットフォームにデータをアップロードするには?
以下のコマンドを使用してください:scp <local-file-path> <brev-instance-name>:<remote-file-path>、例:scp -r ./record_2_cameras/ gr00t-trainer:/home/ubuntu/Datasets
Q3: インストール開始後にThorの画面が黒くなる
以前に使用またはセットアップされたJetson AGX Thor Developer KitでJetsonインストールUSBスティックを使用する場合、UEFIセットアップメニューでSoC Display Hand-Offを有効にする必要があります。
実際には、この間もバックグラウンドでフラッシュが続行されており、しばらくするとUbuntuデスクトップが表示されます。
Q4: モニターに映像出力がない(KVM経由で接続)
一部のKVMスイッチ/デバイスは、Jetson AGX Thor Developer Kitからの映像出力を適切に処理できないことが知られています。モニターをJetson AGX Thor Developer Kitに直接接続してください。
Q5: Thorのフラッシュ後、その後の起動でHDMIが信号なしを表示することがある
効果的であることが証明された回避策は、表示出力にDisplayPort(DP)コネクタに切り替えることです。
Q6: Thorイメージフラッシュ中にキーボード入力が検出されない
フラッシュ中は有線キーボードの使用を推奨します。ワイヤレスキーボードは、Thorフラッシュプロセス中に互換性が限定される場合があります。
Q7: GR00Tのクラウドファインチューニングで「GPU not supported」エラーが発生
GR00Tのクラウドファインチューニングには、Ampereアーキテクチャより古いGPUを使用しないでください(例:RTX A6000またはGeForce RTX 4090)。V100(Volta)はGR00Tの訓練やファインチューニングには対応していません。
Q8: ロボットアームコントローラーボードのシリアルデバイス名が/dev下に表示されない
標準のThorシステムにはCH34xドライバーが含まれていません。不足している場合は、以下からインストールしてください:
https://github.com/juliagoda/CH341SER
Q9: ThorのType-Cポートが外部ハブを認識しない
ThorのType-C経由で外部ハブを使用するには、QSFP28コネクタに最も近いType-Cポートに接続してください。(両方のType-Cポートが電力を供給しますが、指定されたポートのみがハブを確実にサポートします。)
Q10: キャプチャカードでフラッシュする際、後でシステムがユーザーパスワードが間違っていると表示する
フラッシュ中にキャプチャカードデスクトップを使用する場合、キーボード入力のバグが発生する可能性があります(入力が入力内容と一致しない)。設定時にユーザーパスワードを再確認してください。
Q11: Thorのデバッグポートはどこにある?
ThorのType-Cデバッグポートは磁気カバーの下に隠れています。複数のシリアルデバイスノードが作成される場合があります。最小のインデックスを持つものを使用してシリアル経由でThorにログインしてください。
Q12: GR00TイメージでLeRobotスクリプトを実行してACTを推論できない
Python 3.12環境でのLeRobot APIを使用したACT推論の呼び出しは推奨しません。Calibrationとfind portスクリプトは問題ありません。Ubuntu 24はローカルでデフォルトでPython 3.12を使用することに注意してください。
Q13: ThorでGPU SM使用率を確認するには?
以下を実行してください:
nvidia-smi dmon -s puc
出力のsm列を確認してください。
Q14: ロボットアームドライバーのシリアルポートからデータを読み取れない
SO-ARMドライバーボードの前にカメラを接続しないでください。そうすると、シリアルデバイスマッピングが正しくなくなる可能性があります。また、シリアルポートの権限が付与されていることを確認してください。
参考文献
- https://developer.nvidia.com/embedded/jetpack
- https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャネルを提供しています。