Seeed Studio BeagleBone® Green Eco
Seeed Studio BeagleBone® Green Eco は、BeagleBoard.org® Foundation と共同開発された産業グレードのオープンソース シングルボード コンピューターで、堅牢な TI AM3358 SoC を搭載しています。この「Eco」バージョンは高効率を目指して設計されており、最適化されたエネルギー消費を確保するために先進的な TI 電源管理チップ(TPS6521403)を組み込んでいます。16GB のオンボード eMMC ストレージと高速ネットワーク接続のためのギガビット イーサネット ポートを備え、要求の厳しいアプリケーションに十分対応できます。シームレスなハードウェア プロトタイピングのために、2つのシグネチャ Grove コネクタを統合し、Seeed の豊富な Grove センサーとモジュールのエコシステムへの直接的でハンダ付け不要のアクセスを提供します。
Linux を10秒未満で起動し、USB ケーブル1本だけで5分未満で開発を開始できます。
特徴
特徴1:強力なコアとリアルタイム処理
- TI AM3358 1GHz ARM® Cortex-A8 プロセッサを統合し、処理を高速化する NEON™ SIMD コプロセッサを搭載しています。また、産業オートメーションやロボティクスに重要な決定論的で低遅延の制御のためのデュアルコア プログラマブル リアルタイム ユニット(PRU-ICSS)も含まれています。
特徴2:エコフレンドリーな電源管理
- PFM モードや動的電圧スケーリングなどの機能を持つ先進的な TI TPS6521403 PMIC を使用しています。これにより電力消費が大幅に最適化され、エネルギーに敏感なアプリケーションやバッテリー駆動アプリケーションに理想的です。
特徴3:4倍のストレージ容量と10倍のネットワーク速度
- 16GB のオンボード eMMC ストレージ(4倍の増加)で大幅に向上し、ギガビット イーサネット ポートで接続性をアップグレードし、高速で安定したネットワーク通信のために前世代の最大10倍の帯域幅を提供します。
特徴4:豊富でモダンな接続性
- ギガビット イーサネット ポートや電源とデータ用のモダンな USB Type-C ポートを含むアップグレードされた高速インターフェースを搭載しています。迅速なプロトタイピングのために、2つの内蔵 Grove コネクタ(I2C & UART)も含まれており、Seeed Studio の豊富なセンサーとアクチュエーターのエコシステムへの簡単でハンダ付け不要の接続を可能にします。
特徴5:開発準備完了
- BeagleBoard.org® Foundation が指定した Debian ソフトウェア イメージがプリロードされており、開発プロセスを合理化するための確立されたツールとライブラリを備えた堅牢で馴染みのある Linux 環境を提供します。
仕様
| カテゴリ | 項目 | Seeed Studio BeagleBone® Green Eco | Seeed Studio BeagleBone® Green |
|---|---|---|---|
| プロセッサ | コア | TI AM3358 1GHz ARM® Cortex-A8 | TI AM3358 1GHz ARM® Cortex-A8 |
| アクセラレータ | NEON 浮動小数点ユニット & 3D グラフィックス アクセラレータ | NEON 浮動小数点ユニット & 3D グラフィックス アクセラレータ | |
| メモリ | RAM | 512MB DDR3L, 800MHz | 512MB DDR3L, 800MHz |
| フラッシュ ストレージ | 16GB eMMC (Kingston EMMC16G-WW28) | 4GB 8-bit eMMC | |
| EEPROM | 4KB | 4KB | |
| 外部ストレージ | microSD カード スロット、最大32GB対応 | microSD カード スロット、最大32GB対応 | |
| 電源 | 電源管理 | TI TPS6521403 PMIC | TI TPS65217C PMIC |
| 電圧レギュレータ | TI TPS62A01DRL (3.3V Buck コンバータ);TI TPS74501PDRV (1.8V Always-On LDO);TI TPS2117DRL (Power Mux) | TI TL5209DR (3.3V LDO レギュレータ) | |
| 入力電圧 | 5V DC (USB Type-C 経由) | 5V DC (micro USB 経由) | |
| インターフェース | USB | 1x USB 2.0 Host Type-A;1x USB 2.0 Type-C (電源 & デバイス通信) | 1x USB クライアント (電源 & 通信);1x USB ホスト |
| ネットワーク | ギガビット イーサネット (10/100/1000Mbps) | イーサネット (10/100Mbit) | |
| 拡張ヘッダー | 2x 46 ピン ヘッダー | 2x 46 ピン ヘッダー | |
| Grove | 1x I2C, 1x UART2 | 1x I2C, 1x UART2 | |
| ボタン | 1x リセット ボタン;1x ユーザー(Boot) ボタン | 1x リセット ボタン;1x ユーザー(Boot) ボタン;1x 電源ボタン | |
| インジケータ | 1x 電源 LED、4x ユーザープログラマブル LED | 4x LED (ハートビート、microSD、CPU、eMMC) | |
| 物理 | 寸法 | 86.4mm x 53.3mm x 18mm | 86.4mm x 53.3mm x 18mm |
| 重量 | 40g | 45g | |
| 動作温度 | -40 ~ 85℃ | 0 ~ 75℃ |
アプリケーション アイデア
- モノのインターネット
- スマート ハウス
- 産業
- オートメーション & プロセス制御
- ヒューマン マシン インターフェース
- センサー ハブ
- ロボット
ハードウェア概要
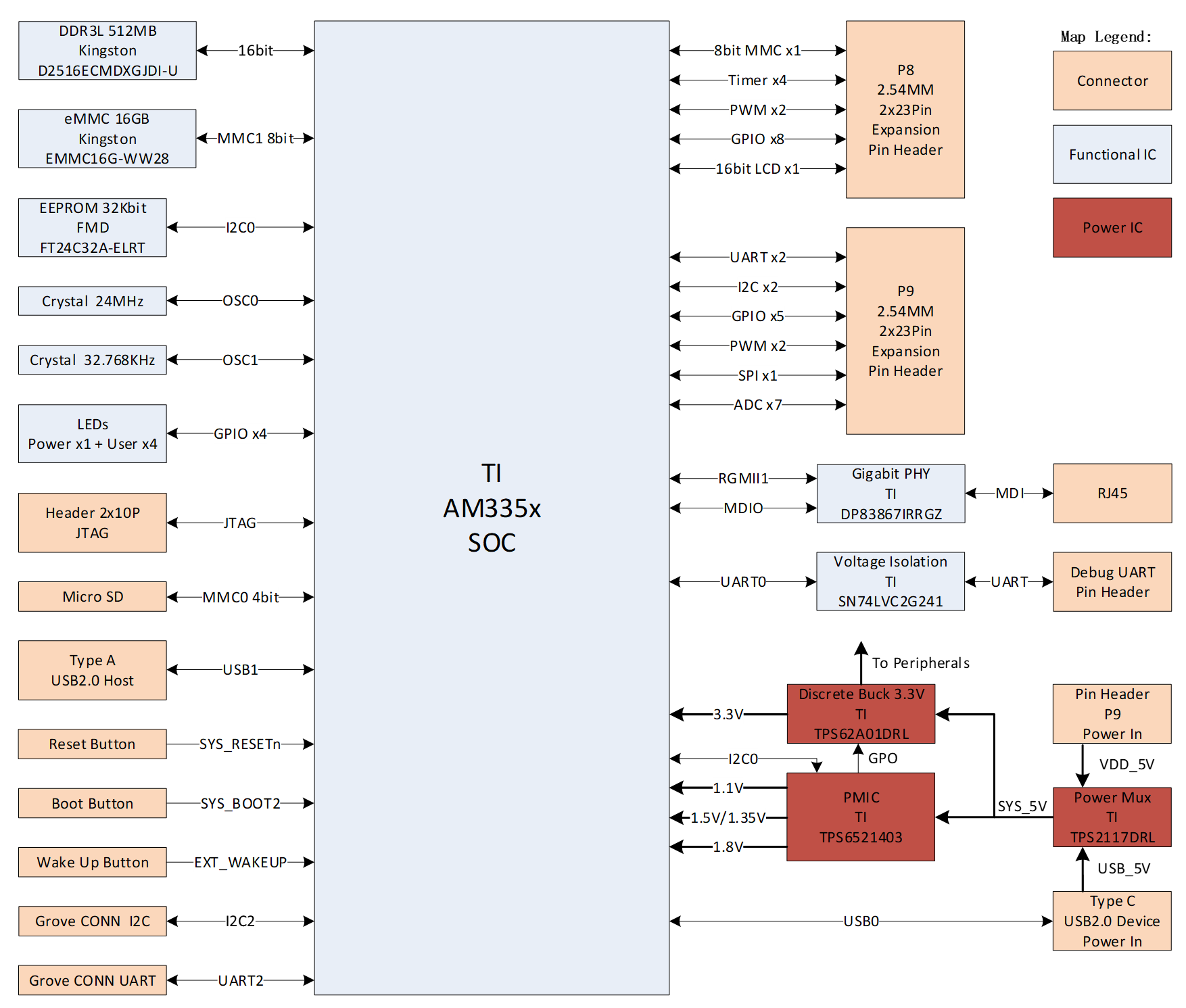
BeagleBone® Green Eco の機能ブロック図 BeagleBone® Green Eco は Texas Instruments の AM335x ARM Cortex-A8 プロセッサを中心に構築されており、多様な組み込みアプリケーションのための堅牢な基盤を提供します。以下は、ボードのハードウェア アーキテクチャを構成する主要コンポーネントと相互接続を示す機能ブロック図です。この図は、AM335x SoC がメモリ、ストレージ、周辺機器、および様々な I/O オプションとどのようにインターフェースするかを示しています。
プロセッサ BeagleBone® Green Eco は、単一の SoC 内で計算処理、グラフィックス アクセラレーション、リアルタイム制御機能を組み合わせた Texas Instruments AM335x 1GHz ARM® Cortex-A8 プロセッサを統合しています。このアーキテクチャは、複雑な計算タスクの効率的な実行のために NEON™ SIMD エンジンと VFPv3 浮動小数点ユニットを備えた ARMv7-A を実装し、組み込みアプリケーションの電力効率を維持します。 特徴的な機能は、メイン ARM プロセッサから独立して動作するデュアル 32 ビット RISC コアで構成されるプログラマブル リアルタイム ユニット サブシステムおよび産業通信サブシステム(PRU-ICSS)です。これらの PRU は、サブマイクロ秒の応答時間での決定論的リアルタイム制御と、特殊な産業通信プロトコルの実装を可能にします。AM335x は、TI の Processor SDK と開発環境を通じて Linux やリアルタイム オペレーティング システムを含む高レベル オペレーティング システムをサポートします。
- AM335x 1GHz ARM® Cortex-A8 プロセッサ、15.0mm x 15.0mm、NFBGA (324)
- 高速化されたメディアと信号処理のための NEON™ SIMD コプロセッサと VFPv3 浮動小数点ユニット
- OpenGL ES 2.0をサポートするPowerVR SGX™グラフィックスアクセラレータ
- リアルタイム産業通信・制御用のデュアル32ビットPRU-ICSS
- EtherCAT、PROFINET、PROFIBUSを含む産業インターフェースのサポート
メモリとストレージ BeagleBone® Green Ecoには以下が含まれます:
- 1x 512MB(4Gb)DDR3L RAM(Kingston D2516ECMDXGJDI-U)16ビットインターフェース付き
- 1x 16GB eMMCオンボードフラッシュストレージ(Kingston EMMC16G-WW28)MMC1 8ビットインターフェース付き
- 1x 32Kbit EEPROM(FMD FT24C32A-ELRT)I2C0経由で接続
- 拡張可能ストレージ用のMicroSDカードスロット(MMC0 4ビットインターフェース)
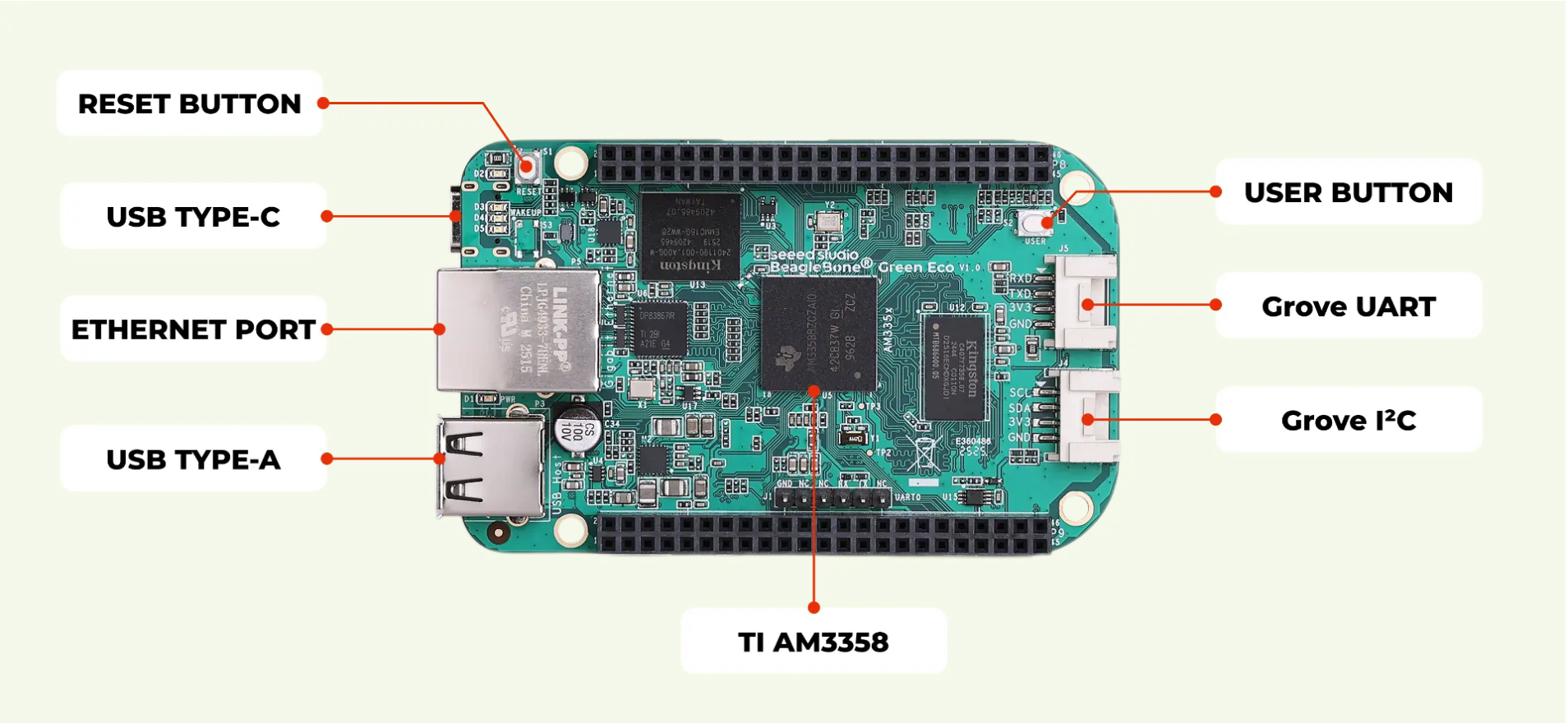
インターフェースと周辺機器 BeagleBone® Green Ecoは以下をサポートします:
- ギガビットイーサネット接続
- 1x USB 2.0 Type-Cポート(電源と通信用)
- 1x USB 2.0ホストインターフェース、Type-A
アプリケーション固有のケープをサポートする拡張コネクタ/ヘッダー
- 2x 46ピンヘッダー
- 1x 6ピンUART0ヘッダー
- 2つのGroveコネクタ(1つはI2C、1つはUART)でGroveエコシステムのセンサーとアクチュエータに簡単接続
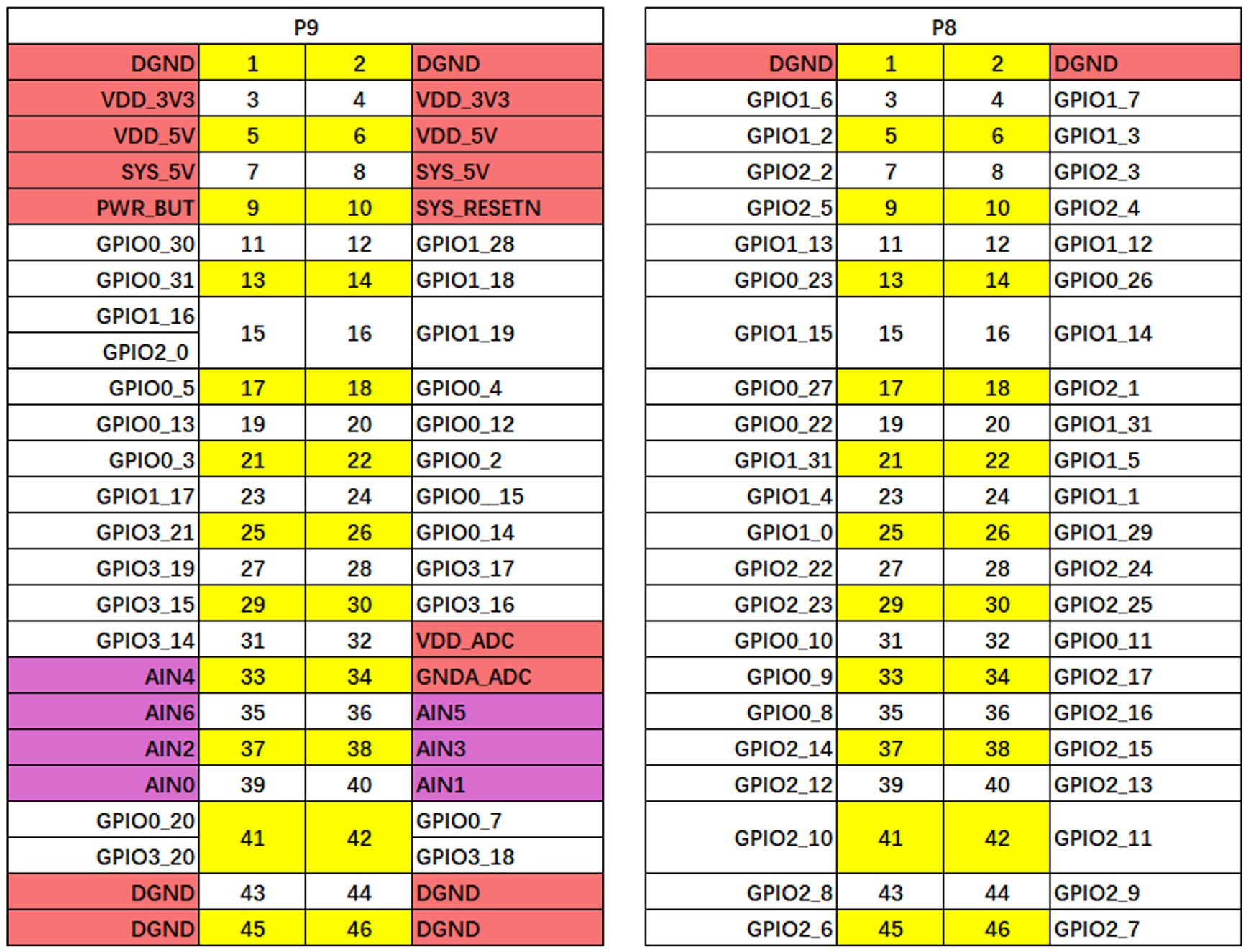
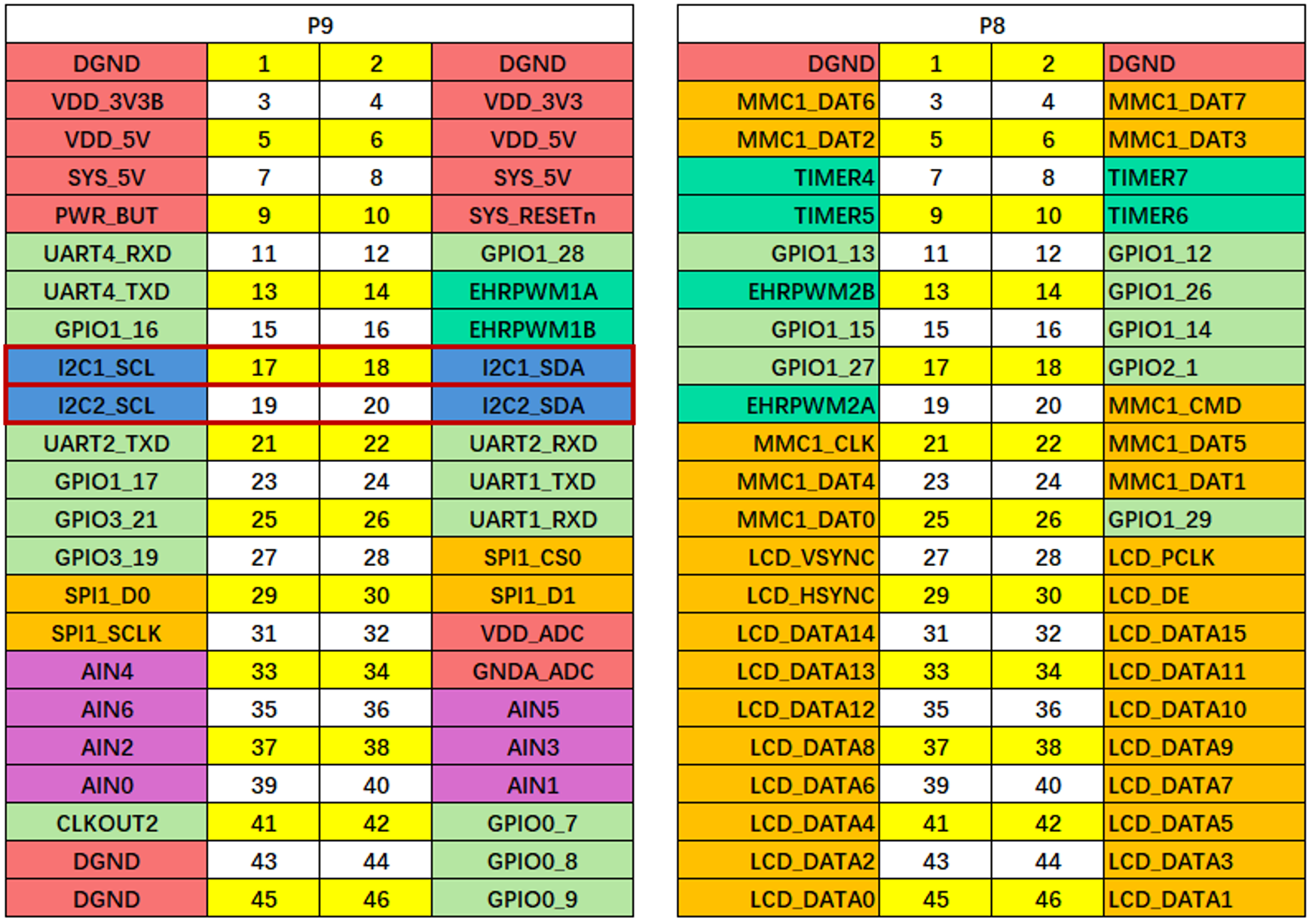
ヘッダーピン定義
各デジタルI/Oピンには、GPIOを含む8つの異なるモードを選択できます。
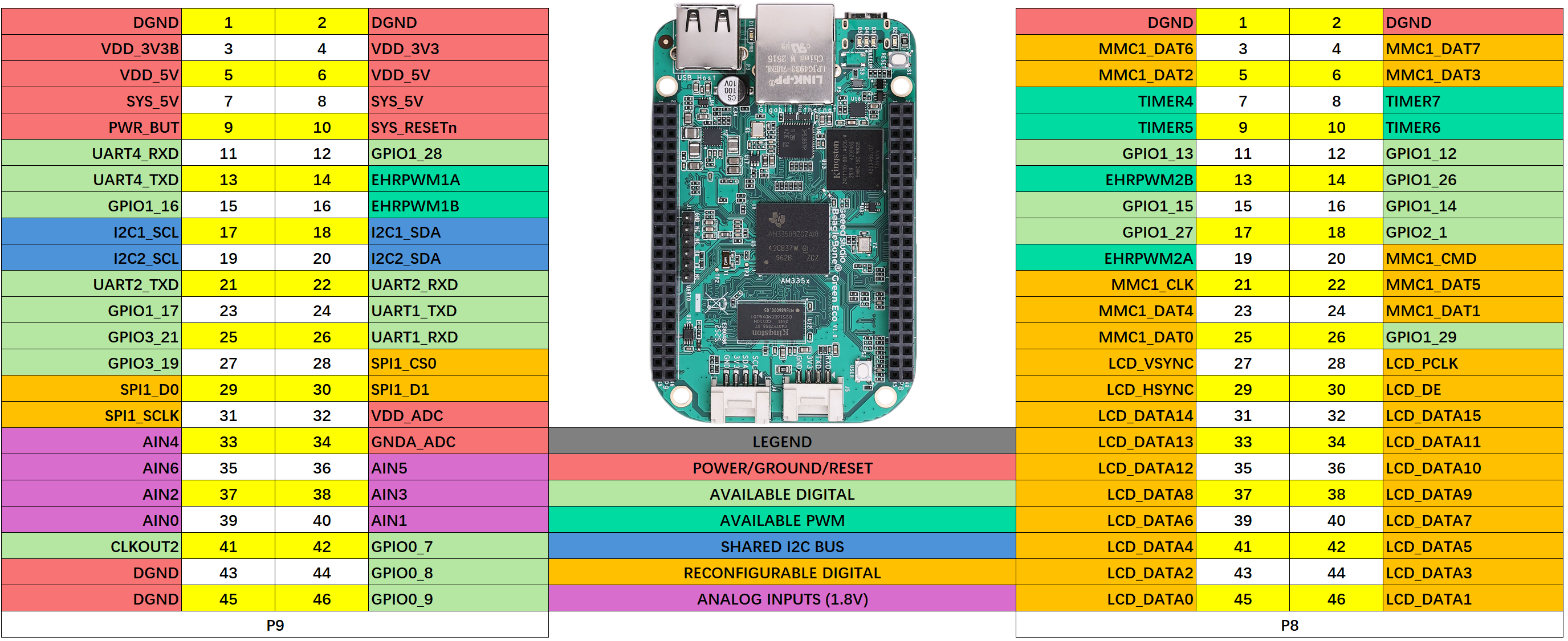
65個の可能なデジタルI/O
GPIOモードでは、各デジタルI/Oは割り込みを生成できます。
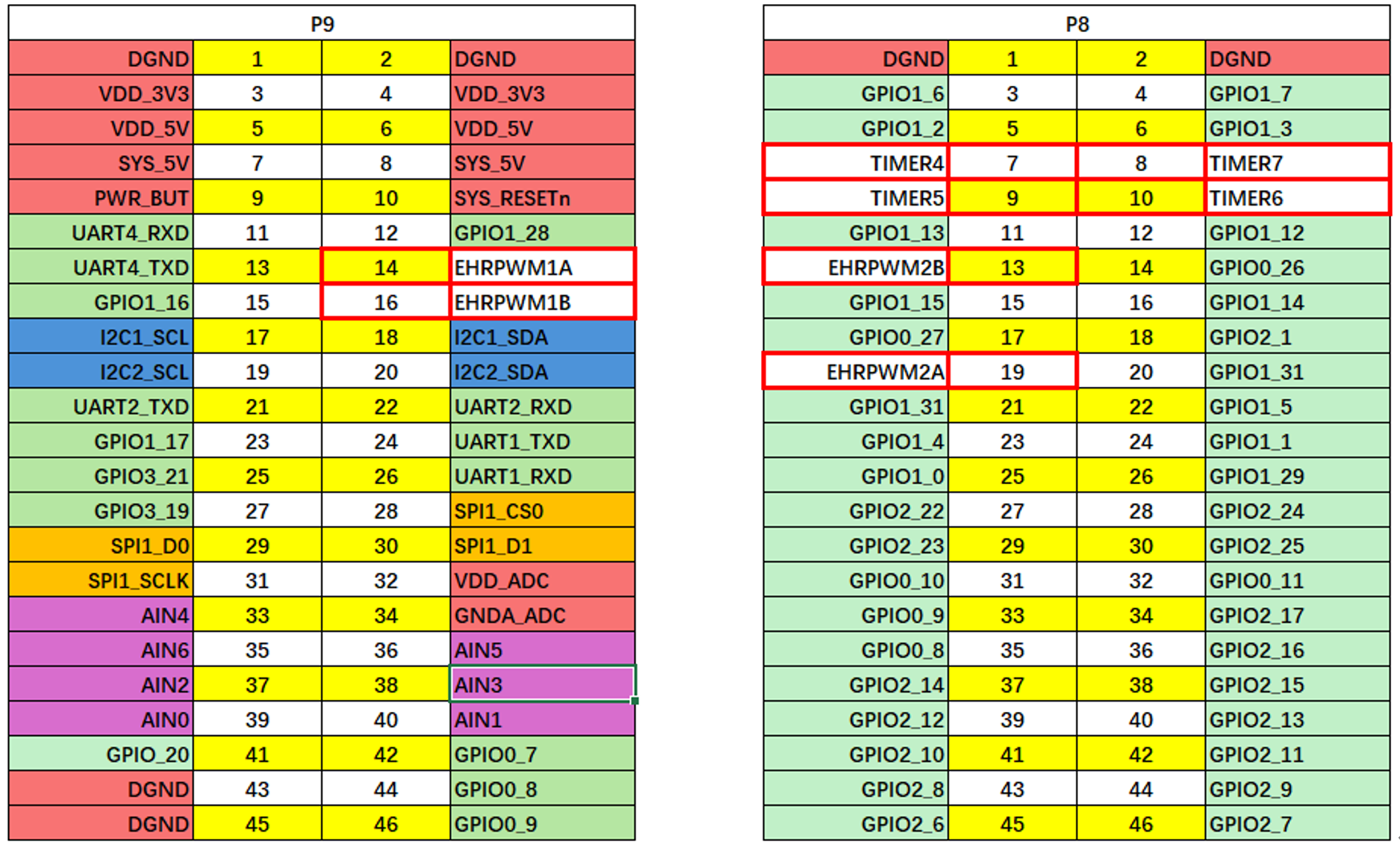
PWMとタイマー
最大8つのデジタルI/Oピンをパルス幅変調器(PWM)で設定して、モーター制御や疑似アナログ電圧レベル生成の信号を、追加のCPUサイクルを消費することなく生成できます。
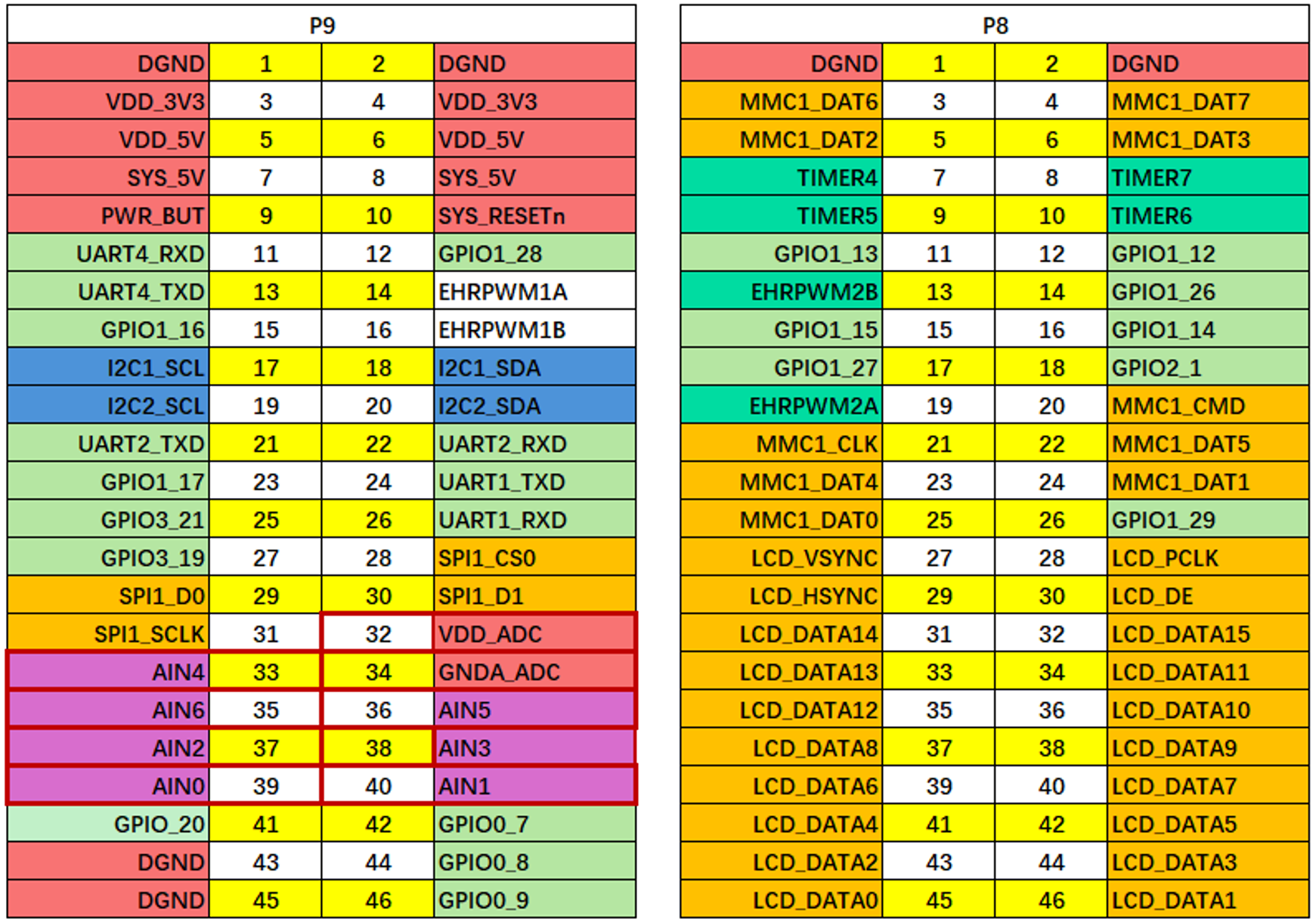
アナログ入力
アナログ入力ピンには1.8V以上を入力しないでください。これは8チャンネルの単一12ビットアナログ-デジタルコンバータで、そのうち7チャンネルがヘッダーで利用可能です。
UART
UART0ピンにアクセスしてデバッグケーブルを接続するための専用ヘッダーがあります。5つの追加シリアルポートが拡張ヘッダーに配線されていますが、そのうち1つは単方向のみがヘッダーに配線されています。
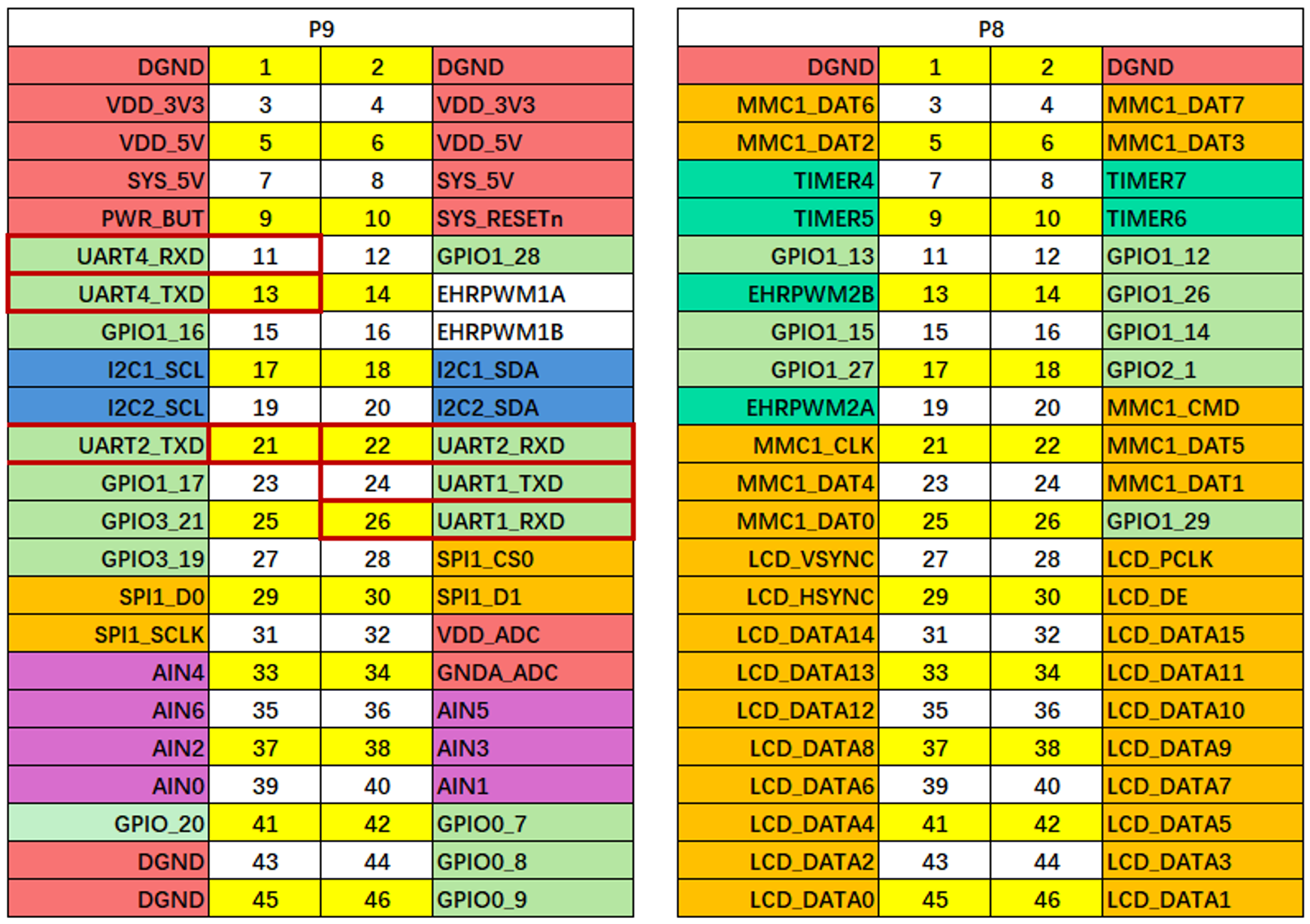
I2C
最初のI2Cバスはケープアドオンボード上のEEPROM読み取りに使用されており、その機能を妨げることなく他のデジタルI/O操作には使用できませんが、利用可能なアドレスで他のI2Cデバイスを追加することは可能です。2番目のI2Cバスは設定と使用が可能です。
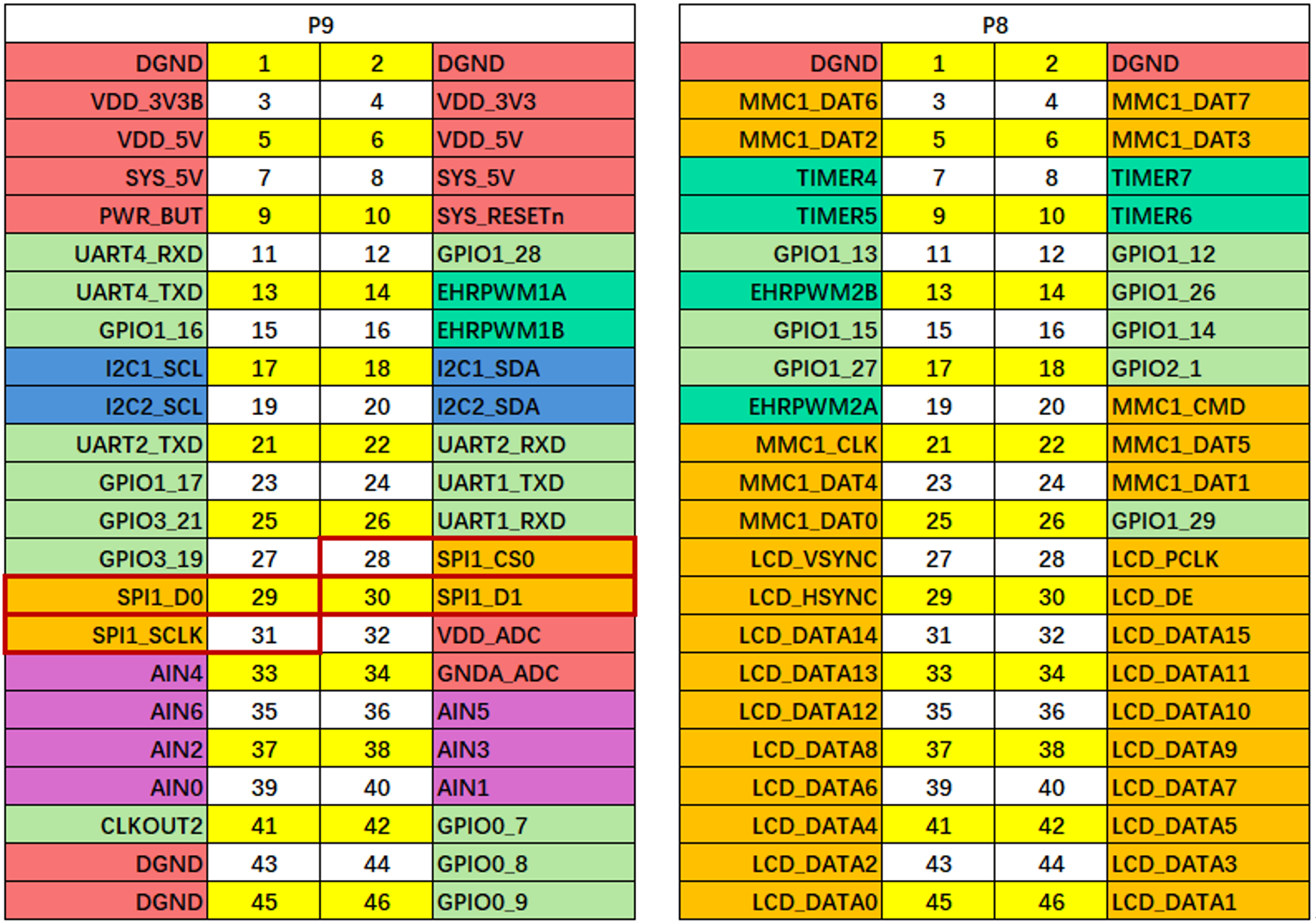
SPI
高速でデータをシフトアウトする場合は、SPIポートの1つの使用を検討してください。
入門ガイド
この章はWindows 10環境で記述されています。他のオペレーティングシステムでも手順は同様です。
ステップ1. Seeed Studio BeagleBone® GreenをUSB経由で接続
付属のmicro USBケーブルを使用して、Seeed Studio BeagleBone® Greenをコンピュータに接続します。これによりボードに電源が供給され、開発インターフェースが提供されます。Seeed Studio BeagleBone® Greenはオンボードの2GBまたは4GB eMMCからLinuxを起動します。
Seeed Studio BeagleBone® Greenはフラッシュドライブとして動作し、ドキュメントとドライバーのローカルコピーを提供します。このインターフェースは新しいイメージでmicroSDカードを再設定するために使用することはできませんが、uEnv.txtファイルを使用してブートパラメータを更新するために使用できます。
PWR LEDが点灯し続けているのが確認できます。10秒以内に、他のLEDがデフォルト設定で点滅しているのが確認できるはずです。
- D2は起動時にハートビートパターンで点滅するよう設定されています
- D3は起動時にmicroSDカードアクセス中に点灯するよう設定されています
- D4は起動時にCPUアクティビティ中に点灯するよう設定されています
- D5は起動時にeMMCアクセス中に点灯するよう設定されています
ステップ2. ドライバーのインストール
お使いのオペレーティングシステム用のドライバーをインストールして、BeagleへのUSB経由ネットワークアクセスを可能にします。追加のドライバーによりボードへのシリアルアクセスが提供されます。
| オペレーティングシステム | USBドライバー | コメント |
|---|---|---|
| Windows(64ビット) | 64ビットインストーラー | |
| Windows(32ビット) | 32ビットインストーラー | |
| Mac OS X | Network Serial | 両方のドライバーセットをインストールしてください。 |
| Linux | mkudevrule.sh | ドライバーのインストールは必須ではありませんが、いくつかのudevルールが役立つ場合があります。 |
追加のFTDI USB to serial/JTAG情報とドライバーはhttps://www.ftdichip.com/Drivers/VCP.htmから入手できます。
追加のUSB to仮想イーサネット情報とドライバーはhttps://www.linux-usb.org/gadget/とhttps://joshuawise.com/horndisから入手できます。
ステップ3. Beagleにブラウザでアクセス
ChromeまたはFirefox(Internet Explorerは動作しません)を使用して、ボード上で実行されているWebサーバーにアクセスします。ボードの機能を示すプレゼンテーションが読み込まれます。キーボードの矢印キーを使用してプレゼンテーションをナビゲートしてください。
http://192.168.7.2をクリックして、Seeed Studio BeagleBone® Greenを起動します。 古いソフトウェアイメージでは、ネットワークを開始するためにBeagleBone®ドライブをEJECTする必要があります。最新のソフトウェアイメージでは、この手順は不要です。

ステップ4. Cloud9 IDE
ボード上にあるプログラムの編集を開始するには、以下をクリックしてCloud9 IDEを使用できます

最新ソフトウェアへの更新
より良いパフォーマンスを維持するために、ボードを最新のソフトウェアに更新する必要があります。ここでは、ステップバイステップでその方法を説明します。
ステップ1. 最新のソフトウェアイメージをダウンロード
まず、こちらから適切なイメージをダウンロードする必要があります。

サイズの関係で、このダウンロードには30分以上かかる場合があります。
ダウンロードするファイルは**.img.xz**拡張子を持ちます。これはSDカードのセクター単位の圧縮イメージです。
ステップ2. 圧縮ユーティリティをインストールしてイメージを展開
7-zipをダウンロードしてインストールします。
お使いのシステムに適したバージョンを選択してください。
7-zipを使用してSDカードの**.imgファイル**を展開します
ステップ3. SDカードプログラミングユーティリティをインストール
Image Writer for Windowsをダウンロードしてインストールします。必ずバイナリ配布版をダウンロードしてください。
ステップ4. SDカードにイメージを書き込み
まず、microSDカードをコンピュータに接続するためのSDアダプターが必要です。次に、Image Write for Windowsソフトウェアを使用して、展開したイメージをSDカードに書き込みます。
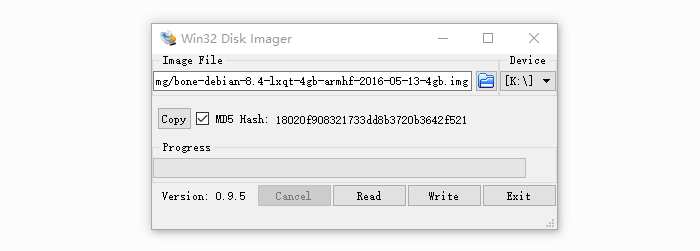
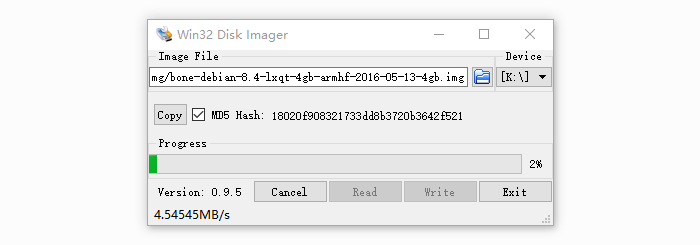
Writeボタンをクリックすると、プロセスが開始されます。
- デバイスの損傷に関する警告が表示される場合があります。書き込み先がSDカードを指している限り、これを受け入れても問題ありません。
- この時点でBeagleBone®をコンピュータに接続しないでください。
- このプロセスには最大10分かかる場合があります。
ステップ5. SDカードからボードを起動
SDカードを(まず電源を切った)ボードに挿入します。その後、ボードはSDカードから起動します。
オンボードeMMCにイメージを書き込む必要がない場合は、この章の残りを読む必要はありません。そうでなければ続行してください。
オンボードeMMCにイメージを書き込みたい場合は、ボードを起動してファイルを変更する必要があります。
/boot/uEnv.txt内で:
##enable BeagleBone® Black: eMMC Flasher: #cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh 以下に変更:
##enable BeagleBone® Black: eMMC Flasher: cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh
その後、4つのユーザーLEDが以下のように点灯します
上記のトレーシングライトが見つからない場合は、RESETボタンを押してボードをリセットしてください。
フラッシュが完了すると、4つのUSRx LEDがすべて消灯します。最新のDebianフラッシャーイメージは、完了時に自動的にボードの電源を切ります。これには最大10分かかる場合があります。ボードの電源を切り、SDカードを取り外してから再度電源を入れて完了です。
Seeed Studio BeagleBone® Green用Grove
Groveは、モジュラーで標準化されたコネクタプロトタイピングシステムです。Groveは、エレクトロニクスを組み立てるためのビルディングブロックアプローチを採用しています。ジャンパーやはんだベースのシステムと比較して、接続、実験、構築が簡単で、学習システムを簡素化しますが、単純化しすぎることはありません。他のプロトタイプシステムの中には、レベルをビルディングブロックまで下げるものもあります。そのような方法で学べることは良いことですが、Groveシステムでは実際のシステムを構築することができます。物事を接続するには、ある程度の学習と専門知識が必要です。
以下に、Seeed Studio BeagleBone® Greenとうまく動作するGroveモジュールを一覧表示します。
| SKU | 名前 | インターフェース | リンク |
|---|---|---|---|
| 101020054 | Grove - 3軸デジタル加速度センサー(+16g) | I2C | リンク |
| 101020071 | Grove - 3軸デジタル加速度センサー(+400g) | I2C | リンク |
| 101020034 | Grove - 3軸デジタルコンパス | I2C | リンク |
| 101020050 | Grove - 3軸デジタルジャイロ | Analog | リンク |
| 101020081 | Grove - 6軸加速度センサー&コンパス v2.0 | I2C | リンク |
| 101020072 | Grove - 気圧センサー(BMP180) | I2C | リンク |
| 104030010 | Grove - 青色LED | I/O | リンク |
| 101020003 | Grove - ボタン | I/O | リンク |
| 111020000 | Grove - ボタン(P) | I/O | リンク |
| 107020000 | Grove - ブザー | I/O | リンク |
| 104030006 | Grove - チェーン接続RGB LED | I2C | リンク |
| 101020030 | Grove - デジタル光センサー | I2C | リンク |
| 103020024 | Grove - 指クリップ心拍センサー | I2C | リンク |
| 101020082 | Grove - 指クリップ心拍センサー(シェル付き) | I2C | リンク |
| 113020003 | Grove - GPS | UART | リンク |
| 104030007 | Grove - 緑色LED | I/O | リンク |
| 103020013 | Grove - I2C ADC | I2C | リンク |
| 103020006 | Grove - I2C ハブ | I2C | リンク |
| 101020079 | Grove - IMU 10DOF | I2C | リンク |
| 101020080 | Grove - IMU 9DOF v2.0 | I2C | リンク |
| 101020040 | Grove - IR距離遮断器 | I/O | リンク |
| 104030011 | Grove - OLEDディスプレイ 0.96'' | I2C | リンク |
| 104030008 | Grove - OLEDディスプレイ 1.12'' | I2C | リンク |
| 104030005 | Grove - 赤色LED | I/O | リンク |
| 103020005 | Grove - リレー | I/O | リンク |
| 316010005 | Grove - サーボ | I/O | リンク |
| 101020023 | Grove - 音センサー | Analog | リンク |
| 101020004 | Grove - スイッチ(P) | I/O | リンク |
| 101020015 | Grove - 温度センサー | Analog | リンク |
| 101020019 | Grove - 温湿度センサー Pro | Analog | リンク |
Seeed Studio BeagleBone® Green用ケープ
プロジェクトを開始する際には、拡張ボードが必要になります。Seeed Studio BeagleBone® Green用のケープは既に多数あり、LCDディスプレイ、モータードライバー、HDMI拡張などが含まれています。以下にそのうちのいくつかを推奨します。
| Grove ケープ | モーターブリッジケープ | HDMIケープ |
|---|---|---|
 |  |  |
| 今すぐ入手! | 今すぐ入手! | 今すぐ入手! |
| Grove ケープ | 5インチLCD | 7インチLCD |
|---|---|---|
 |  |  |
| 今すぐ入手! | 今すぐ入手! | 今すぐ入手! |
参考資料
ボードに関するより多くの情報を得るのに役立つ多くの参考資料があります。
- BeagleBoardメインページ
- BeagleBoardスタートガイド
- トラブルシューティング
- ハードウェアドキュメント
- BeagleBoardのプロジェクト
- Seeed Studio BeagleBone® Green EcoのCE認証
- Seeed Studio BeagleBone® Green EcoのFCC認証
リソース
- [PDF] AM335X データシート
- [PDF] Seeed Studio BeagleBone Green Eco 回路図
- [PDF] Seeed Studio BeagleBone Green Eco 構造リファレンス
- [DXF] Seeed Studio BeagleBone Green Eco 構造リファレンス
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。