IMX219 カメラセットアップガイド
IMX219 は広く使用されている 8 メガピクセル CMOS イメージセンサで、15 ピンの CSI フラットケーブルを使用します。
ハードウェアの取り付け
CSI カメラはホットスワップをサポートしていません。すべての配線作業は、開発ボードの電源を完全に切った状態で行う必要があります。
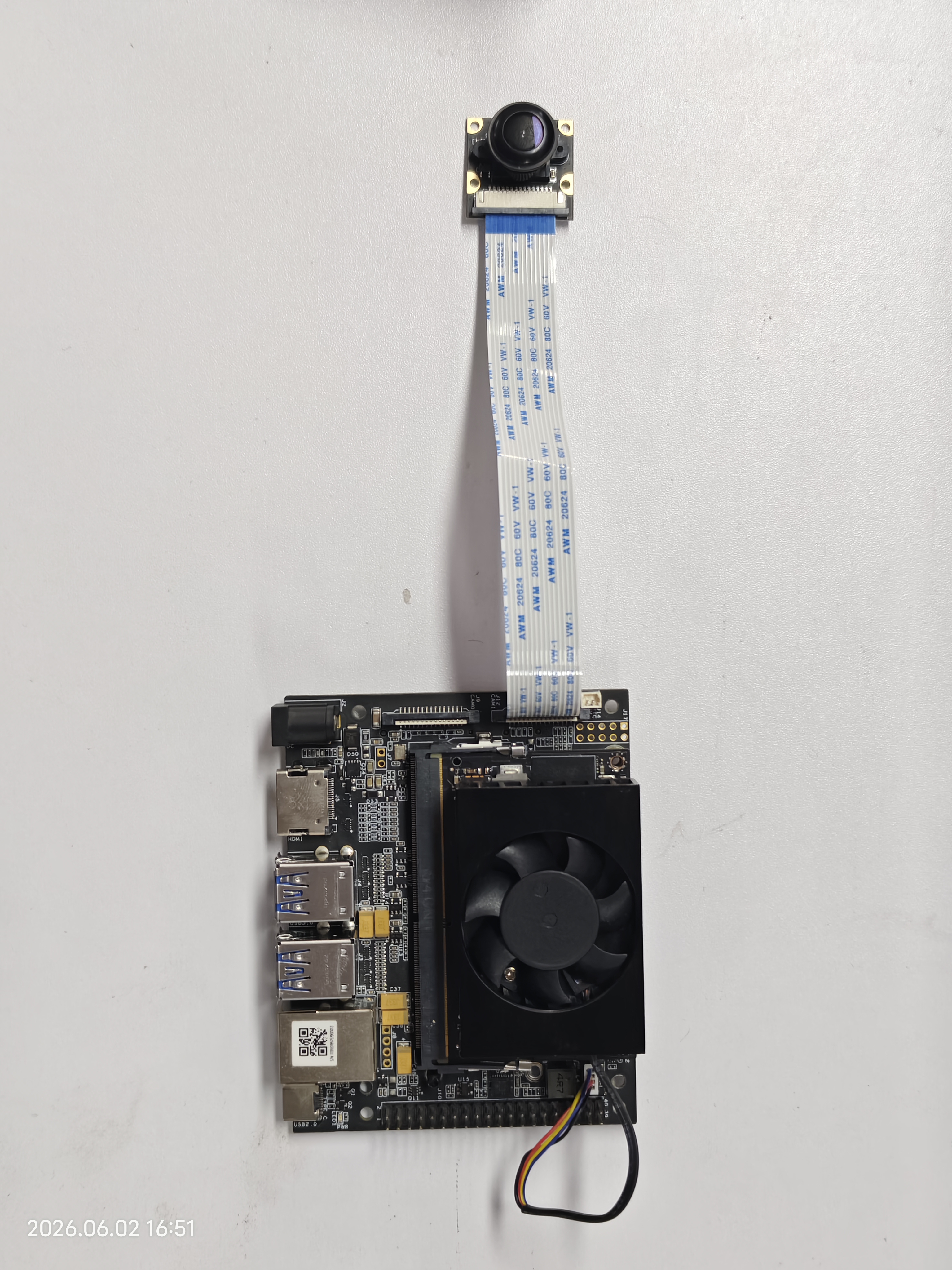
Jetson ボードの CSI コネクタのラッチを持ち上げます。 CSI フラットケーブルを挿入し、ケーブルの金属端子が Jetson キャリアボード上の端子と正しく合うようにします。 ラッチをしっかり押し下げて、ケーブルを固定します。
ソフトウェアドライバの設定
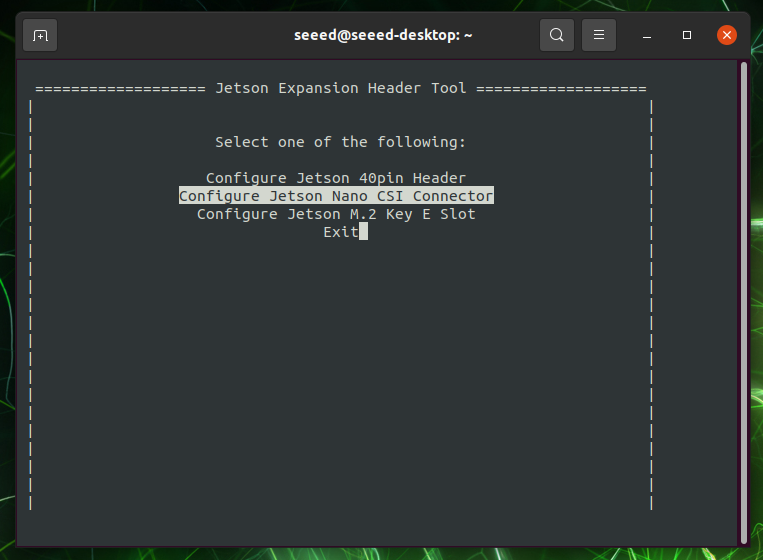
NVIDIA の設定ツールを起動します:
sudo /opt/nvidia/jetson-io/jetson-io.py
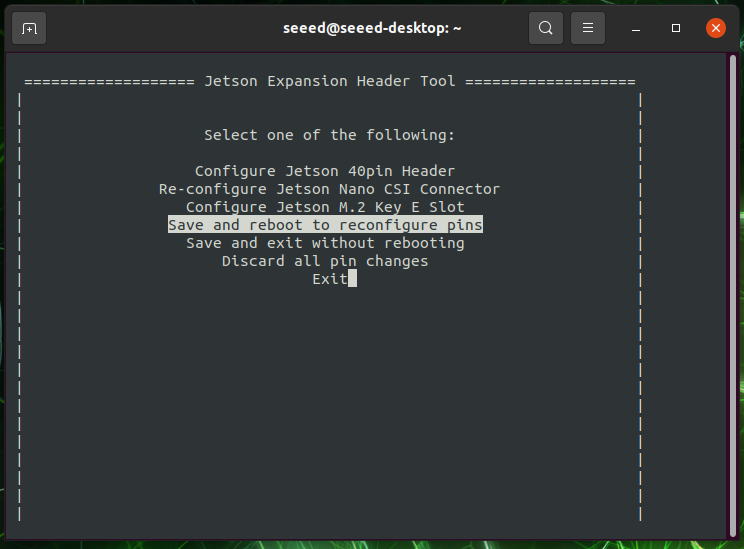
Configure Jetson Nano CSI Connector に移動します。
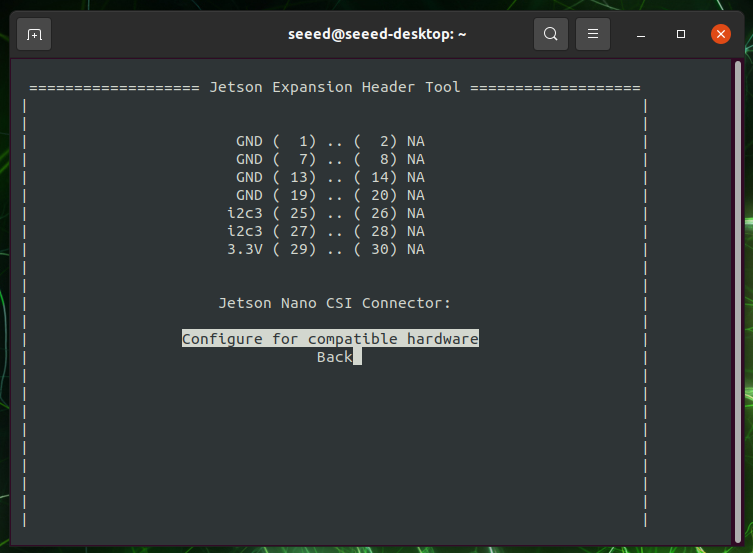
Configure for compatible hardware を選択します。 リストから Camera IMX219 Dual を選択します。
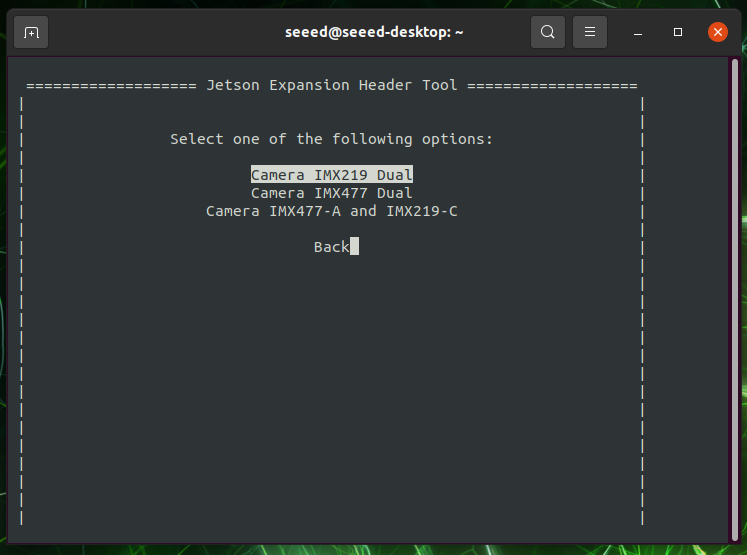
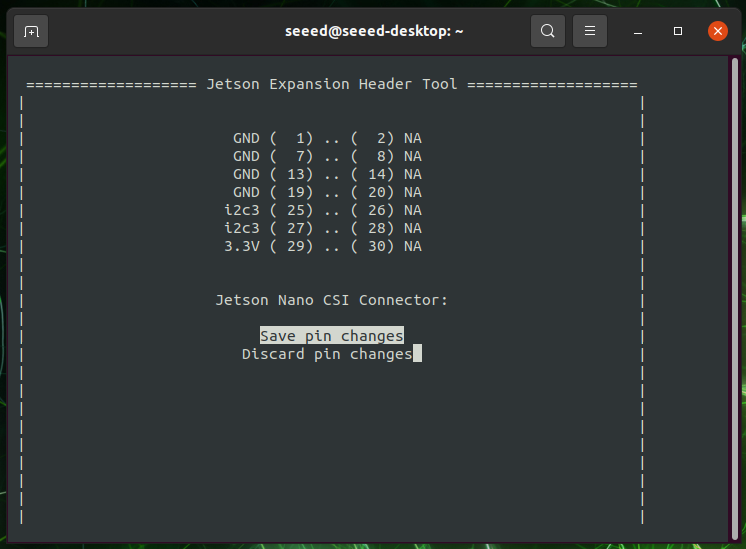
Save pin changes を選択します。 Save and reboot を選択してピンを再設定し、デバイスツリーの変更を適用します。
💡 ヒント:単眼カメラを接続する場合は、正しく動作させるために「Camera IMX219 Dual」モードを選択する必要があります。逆に、デュアルカメラ構成を接続する場合は「Single」モードを選択してください。
デバイスノードの確認 システムが再起動したら、ターミナルを開き、次のコマンドを実行してハードウェアが認識されているか確認します:
ls /dev/video*
出力に /dev/video0 のようなデバイスノードが含まれていれば、ハードウェア接続は成功しています。その後、最も簡単な方法でカメラをテストできます:
nvgstcapture
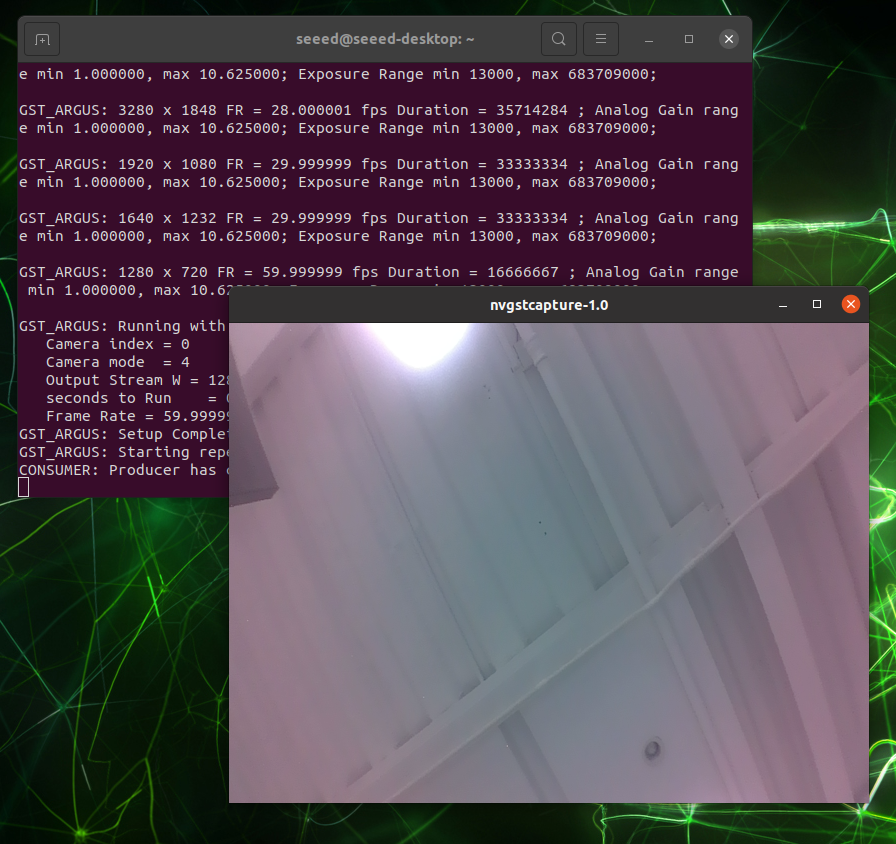
カメラ映像の端に赤みがかって見えることがあります。これは ISP(Image Signal Processing)設定ファイルが不足していることが原因です。
ISP ファイルの設定
NVIDIA 公式の ISP 設定ファイルをダウンロードしてインストールすることで、色の歪みを修正できます。
ファイルをダウンロードして展開します:
wget https://files.seeedstudio.com//Driver/Camera_overrides.tar.gz
tar zxvf Camera_overrides.tar.gz
ファイルをシステムの Nvidia カメラ設定ディレクトリに移動し、パーミッションを変更します:
sudo mv camera_overrides.isp /var/nvidia/nvcam/settings/
sudo chmod 664 /var/nvidia/nvcam/settings/camera_overrides.isp
sudo chown root:root /var/nvidia/nvcam/settings/camera_overrides.isp
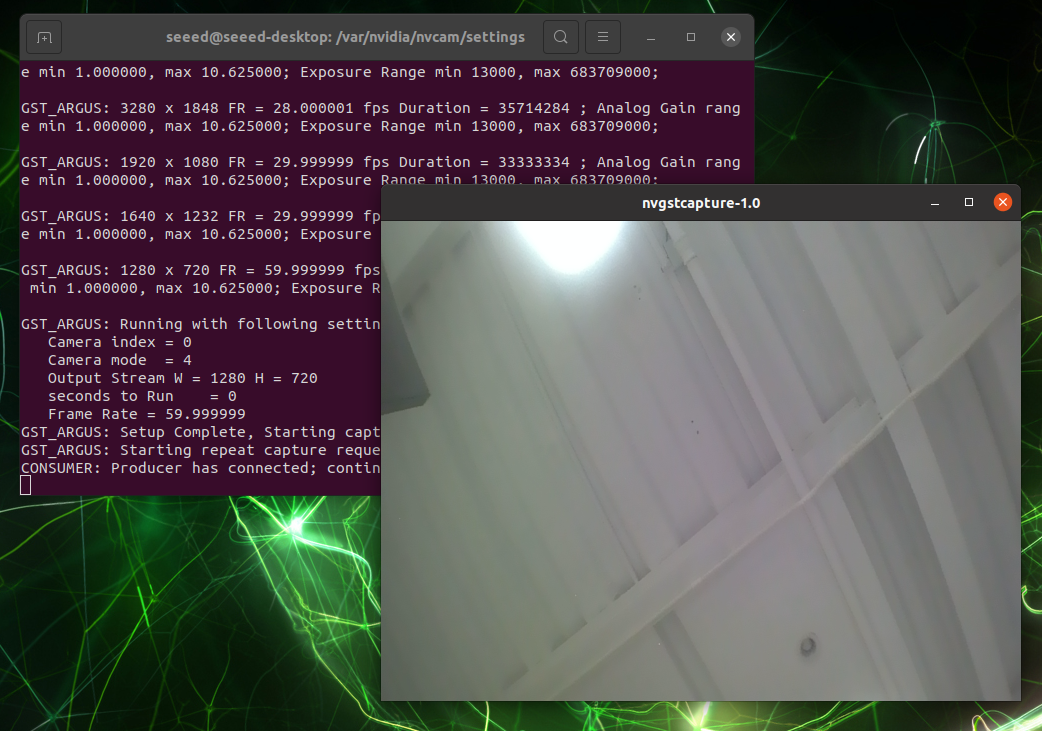
ISP ファイルを置き換えたら、カメラプレビューアプリケーションを再起動します。端の赤みは修正されているはずです。
⚠️ 注意:この ISP 上書きファイルを適用した状態で標準の Raspberry Pi V2 カメラに戻すと、画像の周囲が青みがかって見える場合があります。異なるカメラモジュールを切り替える際は、元の ISP 設定をバックアップまたは復元することを推奨します。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選べる複数のコミュニケーションチャネルをご用意しています。