Isaac ROS AprilTag
前提条件
AprilTagをデプロイする前に、reComputerでIsaac ROSの基本環境が正常にセットアップされていることを確認してください インストールガイド。ROS2がインストールされていない場合は、このドキュメントを参照してください。
Isaac ROS AprilTagパッケージトピック
購読トピック:
| ROSトピック | インターフェース | 説明 |
|---|---|---|
| image | sensor_msgs/Image | 入力カメラストリーム。 |
| camera_info | sensor_msgs/CameraInfo | 入力カメラ内部パラメータストリーム。 |
配信トピック:
| ROSトピック | タイプ | 説明 |
|---|---|---|
| tag_detections | isaac_ros_apriltag_interfaces/AprilTagDetectionArray | AprilTag検出メッセージの配列。 |
| tf | tf2_msgs/TFMessage | 検出されたAprilTag(TagFamily:ID)のカメラのframe_idに対する相対的な姿勢。 |
1. Isaac ROS AprilTag環境セットアップ
ワークスペースの作成(既に完了している場合はスキップ)
mkdir -p ~/workspaces/isaac_ros-dev/src
echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc
source ~/.bashrc
パッケージとROSバッグデータのクローン
cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_apriltag.git
cd ${ISAAC_ROS_WS}/src/isaac_ros_apriltag && \
git lfs pull -X "" -I "resources/rosbags/quickstart.bag"
Dockerコンテナに入る
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
2. ROSバッグデータでのテスト
AprilTagパッケージのインストール(Docker内)
sudo apt-get install -y ros-humble-isaac-ros-apriltag
AprilTagノードの起動
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
新しいターミナルを開く(Docker内)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
ROSバッグの再生
ros2 bag play --loop src/isaac_ros_apriltag/resources/rosbags/quickstart.bag
RViz2での可視化
ローカルターミナルでRViz2を開き、ImageとTFコンポーネントを追加します:
ros2 run rviz2 rviz2

3. USBカメラでのテスト
ROS2がローカルにインストールされていることを確認してください。
USBカメラワークスペースの作成
cd ~/
mkdir -p usbcam/src
cd usbcam/src
usb_camパッケージのクローンとビルド
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
colcon build
echo "source ~/usbcam/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
カメラフォーマットの確認
カメラを接続し、デバイスパス(例:/dev/video*)を確認します。以下でテストします:
cd ~/usbcam
ros2 run usb_cam usb_cam_node_exe

サポートされているピクセルフォーマット:
rgb8, yuyv, yuyv2rgb, uyvy, uyvy2rgb, m4202rgb, mono8, mono16, y102mono8, raw_mjpeg
カメラの設定
/usbcam/src/usb_cam/config/params_1.yamlのpixel_formatを変更します。
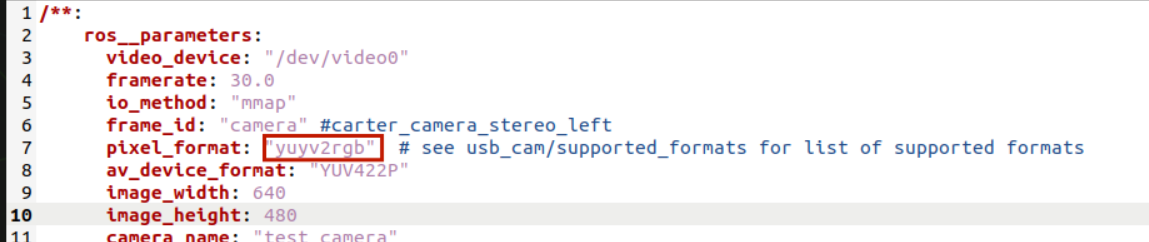
frame_idを調整します(デフォルト:camera)。/usbcam/src/usb_cam/launch/camera_config.py(58行目と62行目)でトピック名をAprilTagの要件(/imageと/camera_info)に合わせてリマップします。

再ビルドとカメラの起動
cd ~/usbcam
colcon build
ros2 launch usb_cam camera.launch.py
AprilTagノードの実行(Docker内)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
RViz2での可視化
Fixed Frameをカメラのframe_idに設定し、/imageを購読するImageコンポーネントを追加し、TFを有効にします。
注:このテストでは200mm × 200mmのAprilTagを使用しています。

技術サポートと製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。