🍎 J501 MiniとStarAI Violaアームによるフルーツ仕分け
🚀 はじめに
このwikiでは、J501 Mini(Jetson AGX Orin)とStarAI Violaロボットアームを使用して、LeRobotフレームワークでフルーツ仕分けタスクを実行する方法を説明します。このプロジェクトでは、データ収集から展開までのエンドツーエンドワークフローを紹介し、ロボットが知的にフルーツを掴んで整理できるようにします。



学習内容:
- 🔧 J501 MiniとStarAI Violaアームのハードウェアセットアップ
- 💻 Jetson AGX OrinでのLeRobotソフトウェア環境設定
- 🎯 フルーツ仕分けタスクのデータ収集とテレオペレーション
- 🤖 ACTポリシーモデルの訓練
- 🚀 自律フルーツ仕分けのための訓練済みモデルの展開

📚 このチュートリアルでは、知的フルーツ仕分けシステムをゼロから構築するためのステップバイステップの手順を提供します。
このwikiはJetPack 6.2.1に基づいており、Jetson AGX Orinモジュールを使用しています。
🛠️ ハードウェア要件
必要なコンポーネント
- J501 Mini(Jetson AGX Orinモジュール付き)
- StarAI Violaフォロワーアーム(6+1自由度)
- StarAI Violinリーダーアーム(6+1自由度、テレオペレーション用)
- USBカメラ2台(640x480 @ 30fps推奨)
- 手首取り付けカメラ1台
- 三人称視点カメラ1台
- UC-01デバッグボード(2台、アームに付属)
- 12V電源(ロボットアーム用)
- USBケーブル(アーム通信用)
- フルーツ(仕分けデモンストレーション用)
ハードウェア仕様
| コンポーネント | 仕様 |
|---|---|
| J501 Mini | Jetson AGX Orin、JetPack 6.2.1 |
| Violaフォロワー | 6+1自由度、470mmリーチ、300gペイロード |
| Violinリーダー | 6+1自由度、470mmリーチ、テレオペレーション |
| カメラ | USB、640x480 @ 30fps、MJPG形式 |
| 電源 | 各アーム12V 10A |
💻 ソフトウェア環境セットアップ
前提条件
- Ubuntu 22.04(JetPack 6.2.1搭載のJ501 Mini)
- Python 3.10
- CUDA 12+
- PyTorch 2.6+(GPU版)
Minicondaのインストール
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
LeRobot環境の作成
# Create conda environment
conda create -y -n lerobot python=3.10 && conda activate lerobot
# Clone LeRobot repository
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
cd ~/lerobot
# Install ffmpeg
conda install ffmpeg -c conda-forge
Jetson用PyTorchとTorchvisionのインストール
Jetsonデバイスでは、LeRobotをインストールする前にGPU版のPyTorchとTorchvisionをインストールする必要があります。PyTorch-gpuとTorchvisionをインストールするには、このJetson PyTorchインストールチュートリアルに従ってください。
LeRobotと依存関係のインストール
PyTorch-gpuとTorchvisionをインストールした後、LeRobotをインストールします:
cd ~/lerobot && pip install -e .
Jetson JetPack 6.0+デバイスの場合、追加の依存関係をインストールします:
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
StarAIモーター依存関係のインストール
pip install lerobot_teleoperator_bimanual_leader
pip install lerobot_robot_bimanual_follower
PyTorchとTorchvisionの確認
pipを介してLeRobot環境をインストールすると、元のPyTorchとTorchvisionがアンインストールされ、CPU版がインストールされるため、Pythonで確認を行う必要があります:
import torch
print(torch.cuda.is_available()) # Should print True
印刷結果がFalseの場合、このJetsonチュートリアルに従ってPyTorchとTorchvisionを再インストールする必要があります。
# Remove brltty if it causes USB port conflicts
sudo apt remove brltty
🔧 ハードウェアセットアップとキャリブレーション
USBポートの設定
ロボットアームを接続し、USBポートを特定します:
cd ~/lerobot
lerobot-find-port
次のような出力が表示されます:
- リーダーアーム:
/dev/ttyUSB0 - フォロワーアーム:
/dev/ttyUSB1
USBポートアクセスを許可します:
sudo chmod 666 /dev/ttyUSB*
初期アーム位置
キャリブレーション前に、両方のアームを初期位置に移動します:
| Violinリーダーアーム | Violaフォロワーアーム |
|---|---|
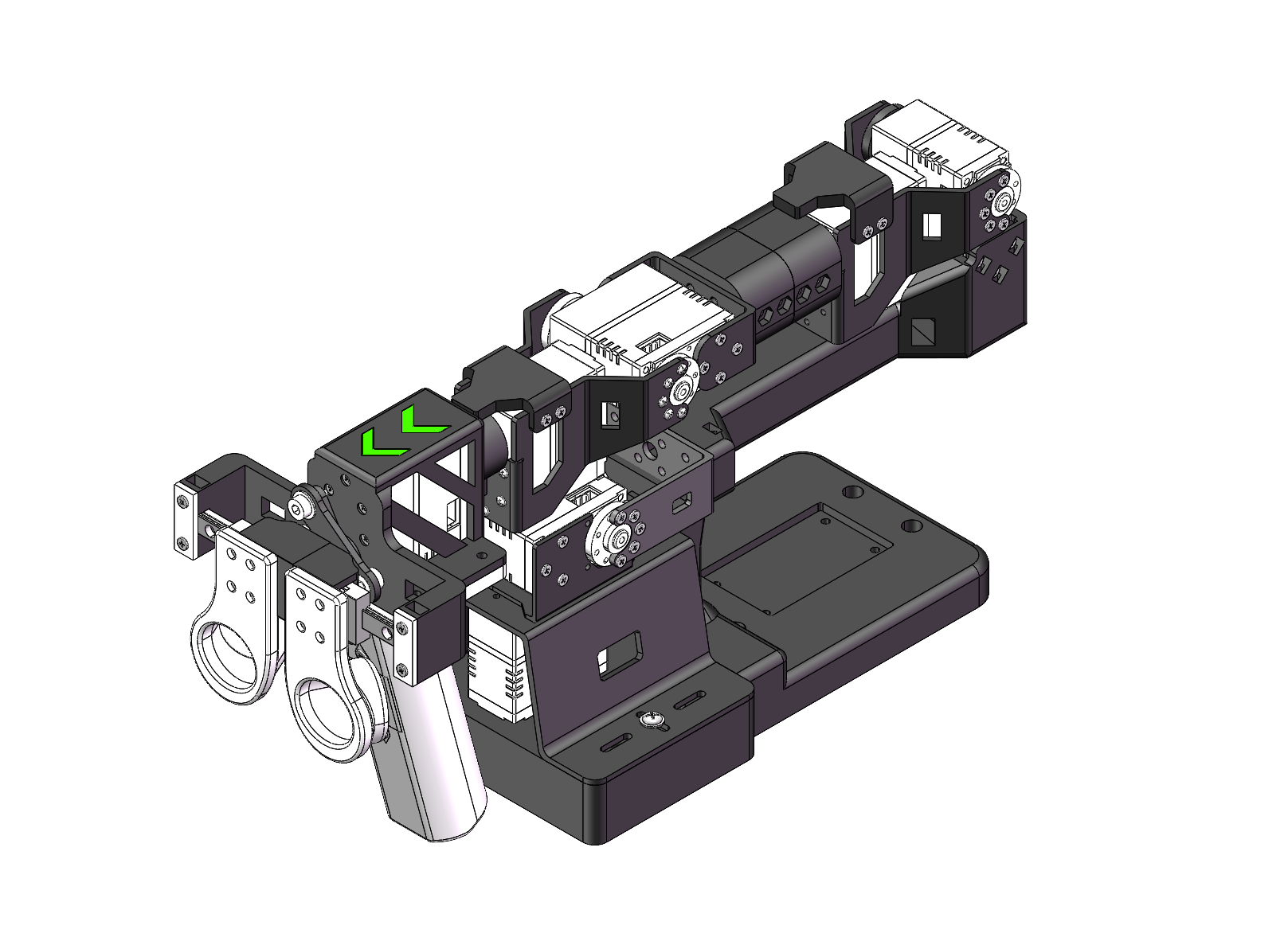 | 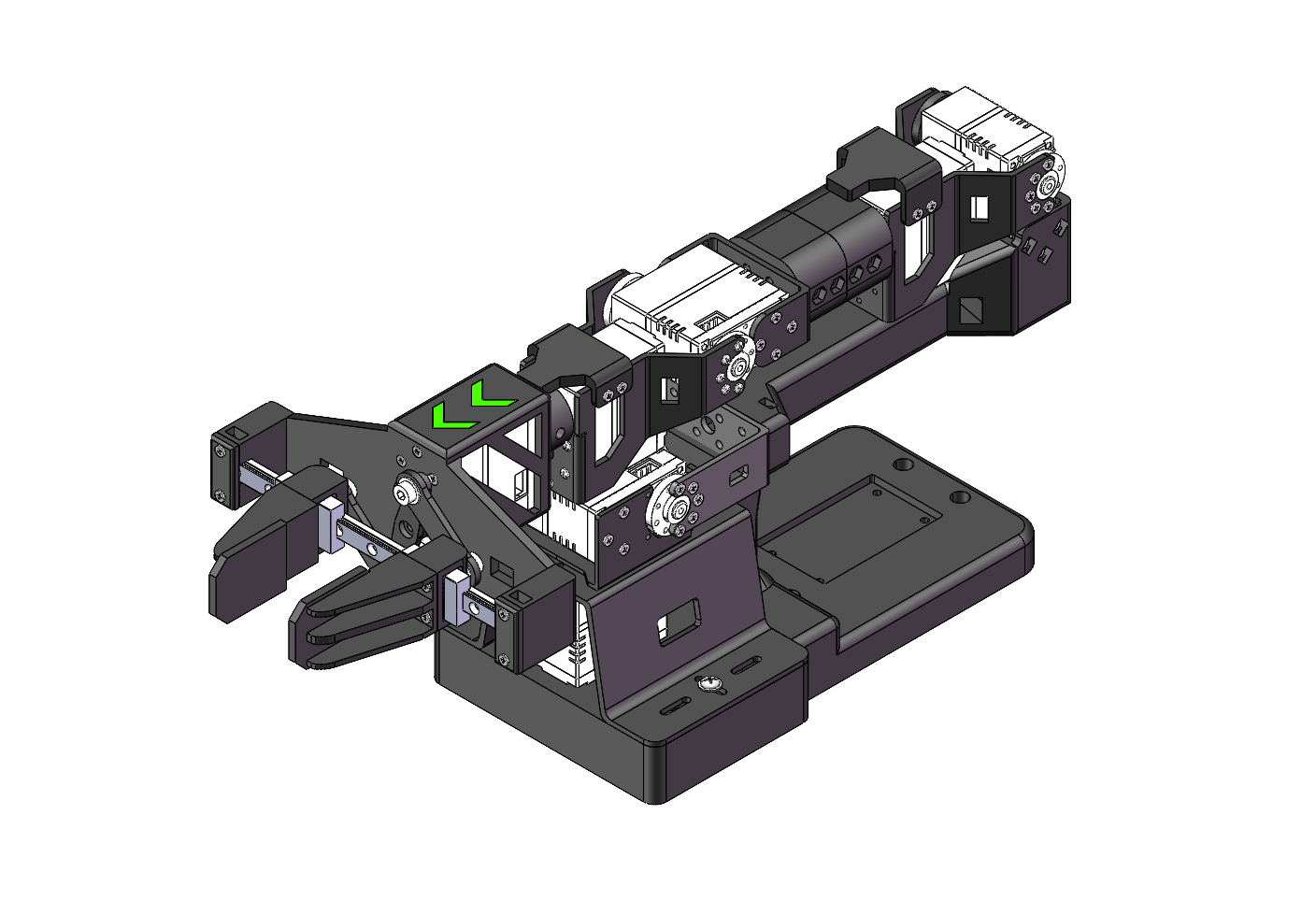 |
リーダーアームのキャリブレーション
lerobot-calibrate \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_violin_leader
各関節を手動で最大位置と最小位置に移動します。すべての関節をキャリブレーションした後、Enterキーを押して保存します。
フォロワーアームのキャリブレーション
lerobot-calibrate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_viola_follower
キャリブレーションファイルは~/.cache/huggingface/lerobot/calibration/に保存されます
カメラのセットアップ
カメラポートを見つけます:
lerobot-find-cameras opencv
出力例:
Camera #0: /dev/video2 (wrist camera)
Camera #1: /dev/video4 (front camera)
カメラを取り付けます:
- 手首カメラ:クローズアップビュー用にグリッパーに取り付け
- フロントカメラ:三人称視点用にデスクトップに配置
🎮 テレオペレーションテスト
データ収集前にテレオペレーションでセットアップをテストします:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_viola_follower \
--robot.cameras="{ wrist: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}, front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_violin_leader \
--display_data=true
ACTモデル訓練では、カメラ名はwristとfrontである必要があります。異なる名前を使用する場合は、ソースコードの修正が必要です。
📊 フルーツ仕分けのデータ収集
Hugging Faceへのログイン(オプション)
データセットをHugging Face Hubにアップロードしたい場合:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
訓練データセットの記録
フルーツ仕分けデモンストレーションの50エピソードを収集します:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_viola_follower \
--robot.cameras="{ wrist: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}, front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_violin_leader \
--display_data=true \
--dataset.repo_id=${HF_USER}/fruit_sorting \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=50 \
--dataset.push_to_hub=true \
--dataset.single_task="Sort fruits into containers"
記録パラメータ
| パラメータ | 説明 |
|---|---|
--dataset.episode_time_s | 各エピソードの持続時間(30秒) |
--dataset.reset_time_s | エピソード間のリセット時間(30秒) |
--dataset.num_episodes | 記録するエピソード数(50) |
--dataset.push_to_hub | Hugging Face Hubにアップロード(true/false) |
--dataset.single_task | タスクの説明 |
記録中のキーボード操作
- 右矢印(→):次のエピソードにスキップ
- 左矢印(←):現在のエピソードを再記録
- ESC:記録を停止してデータセットを保存
キーボード制御が動作しない場合は、pip install pynput==1.6.8 を試してください
エピソードの再生
エピソードを再生して記録されたデータをテストします:
lerobot-replay \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_viola_follower \
--dataset.repo_id=${HF_USER}/fruit_sorting \
--dataset.episode=0
🎓 ACT ポリシーの訓練
訓練設定
収集したデータセットでACTモデルを訓練します:
lerobot-train \
--dataset.repo_id=${HF_USER}/fruit_sorting \
--policy.type=act \
--output_dir=outputs/train/fruit_sorting_act \
--job_name=fruit_sorting_act \
--policy.device=cuda \
--wandb.enable=false \
--policy.repo_id=${HF_USER}/fruit_sorting_policy \
--steps=100000 \
--batch_size=8 \
--eval.batch_size=8 \
--eval.n_episodes=10 \
--eval_freq=5000
訓練パラメータ
| パラメータ | 説明 |
|---|---|
--policy.type | モデルタイプ (act) |
--steps | 総訓練ステップ数 (100,000) |
--batch_size | 訓練バッチサイズ (8) |
--eval_freq | 評価頻度 (5000ステップごと) |
--wandb.enable | Weights & Biases ログ記録を有効化 |
訓練時間
J501 Mini (AGX Orin) での場合:
- 50エピソード:約8-10時間
- 100エピソード:約16-20時間
--wandb.enable=true を有効にして、Weights & Biases で訓練の進捗を監視できます。まず wandb login を実行してください。
訓練の再開
訓練が中断された場合、最後のチェックポイントから再開します:
lerobot-train \
--config_path=outputs/train/fruit_sorting_act/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=200000
🚀 デプロイメントと評価
訓練済みモデルの評価
評価エピソードを実行して訓練済みポリシーをテストします:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_viola_follower \
--robot.cameras="{ wrist: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}, front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: 'MJPG'}}" \
--display_data=false \
--dataset.repo_id=${HF_USER}/eval_fruit_sorting \
--dataset.single_task="Sort fruits into containers" \
--dataset.num_episodes=10 \
--policy.path=outputs/train/fruit_sorting_act/checkpoints/last/pretrained_model
自律動作
訓練が完了すると、ロボットは自律的にフルーツを仕分けできます。以下の動画は、J501 Mini と StarAI Viola アームを使用して訓練済みACTポリシーによる完全なフルーツ仕分けワークフローを実演しています:
デモのハイライト:
- ロボットが自律的に異なるフルーツを識別し把持
- テレオペレーションデモンストレーションから学習したスムーズで正確な動き
- 指定されたコンテナへのフルーツ仕分けに成功
- J501 Mini で訓練されたACTポリシーの有効性を実証
自律フルーツ仕分けを実行するには:
- ワークスペースにフルーツを配置
- 上記の評価コマンドを実行
- ロボットが学習した行動を実行してフルーツを把持・仕分け
🎯 性能向上のためのヒント
データ収集のベストプラクティス
-
一貫した環境
- 照明条件を安定に保つ
- 背景の変化を最小限に抑える
- 一貫したフルーツ配置を使用
-
量より質
- スムーズで意図的なデモンストレーションを収集
- ぎくしゃくした動きを避ける
- 訓練データで成功した把持を確保
-
カメラ位置
- カメラアングルを一貫して保つ
- フルーツとグリッパーの良好な視認性を確保
- 記録中のカメラ移動を避ける
訓練の最適化
-
データセットサイズ
- 50エピソードから開始
- 性能が不十分な場合はデータを追加
- 単純なタスクには通常100-200エピソードで十分
-
ハイパーパラメータ調整
- GPUメモリに基づいてバッチサイズを調整
- より良い収束のために訓練ステップを増加
- 評価メトリクスを監視
-
環境の一貫性
- 訓練と同様の条件でデプロイ
- 一貫した照明を維持
- 同様のフルーツタイプとコンテナを使用
🔧 トラブルシューティング
よくある問題
USBポートが検出されない
# Remove brltty
sudo apt remove brltty
# Check USB devices
lsusb
sudo dmesg | grep ttyUSB
# Grant permissions
sudo chmod 777 /dev/ttyUSB*
カメラが動作しない
- USBハブ経由でカメラを接続しない
- 直接USB接続を使用
lerobot-find-cameras opencvでカメラインデックスを確認
訓練でメモリ不足
- バッチサイズを削減:
--batch_size=4 - 画像解像度を削減
- 他のアプリケーションを閉じる
推論性能が悪い
- より多くの訓練データを収集
- 一貫した環境を確保
- カメラ位置を確認
- キャリブレーション精度を検証
📚 参考資料
🤝 技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。