LerobotでLekiwiを使用する方法
このチュートリアルリポジトリは、2025年6月5日時点で検証済みの安定版Lerobotを維持しています。現在、Hugging Faceは多くの新機能を導入したLerobotのメジャーアップグレードを展開しています。最新のチュートリアルを体験したい場合は、公式ドキュメントのガイダンスに従ってください。
はじめに
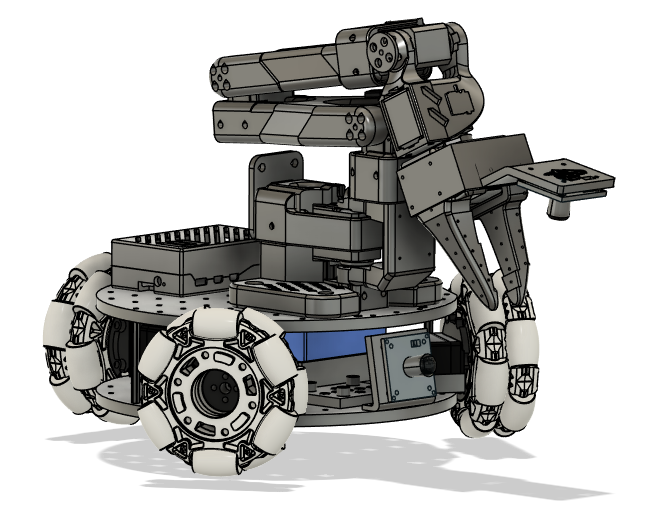
Lekiwiは、SIGRobotics-UIUCによって開始された完全オープンソースのロボットカープロジェクトです。詳細な3Dプリントファイルと操作ガイドが含まれており、LeRobot模倣学習フレームワークとの互換性を持つよう設計されています。SO101ロボットアームをサポートして、完全な模倣学習パイプラインを可能にします。
主な特徴
- オープンソースで低コスト:Lekiwiからのオープンソース、低コストロボットカーソリューションです
- LeRobotとの統合:LeRobotプラットフォームとの統合を目的として設計されています
- 豊富な学習リソース:組み立てと校正ガイド、テスト、データ収集、トレーニング、デプロイメントのチュートリアルなど、包括的なオープンソース学習リソースを提供し、ユーザーが迅速に開始してロボットアプリケーションを開発できるよう支援します。
- Nvidiaとの互換性:このアームキットをreComputer Mini J4012 Orin NX 16 GBでデプロイします。
- マルチシーンアプリケーション:教育、科学研究、自動化生産、ロボット工学などの分野に適用可能で、ユーザーが様々な複雑なタスクで効率的で精密なロボット操作を実現できるよう支援します。
Seeed Studioはハードウェア自体の品質についてのみ責任を負います。チュートリアルは公式ドキュメントに厳密に従って更新されます。解決できないソフトウェアの問題や環境依存の問題に遭遇した場合は、LeRobotプラットフォームまたはLeRobot Discordチャンネルに速やかに問題を報告してください。
-
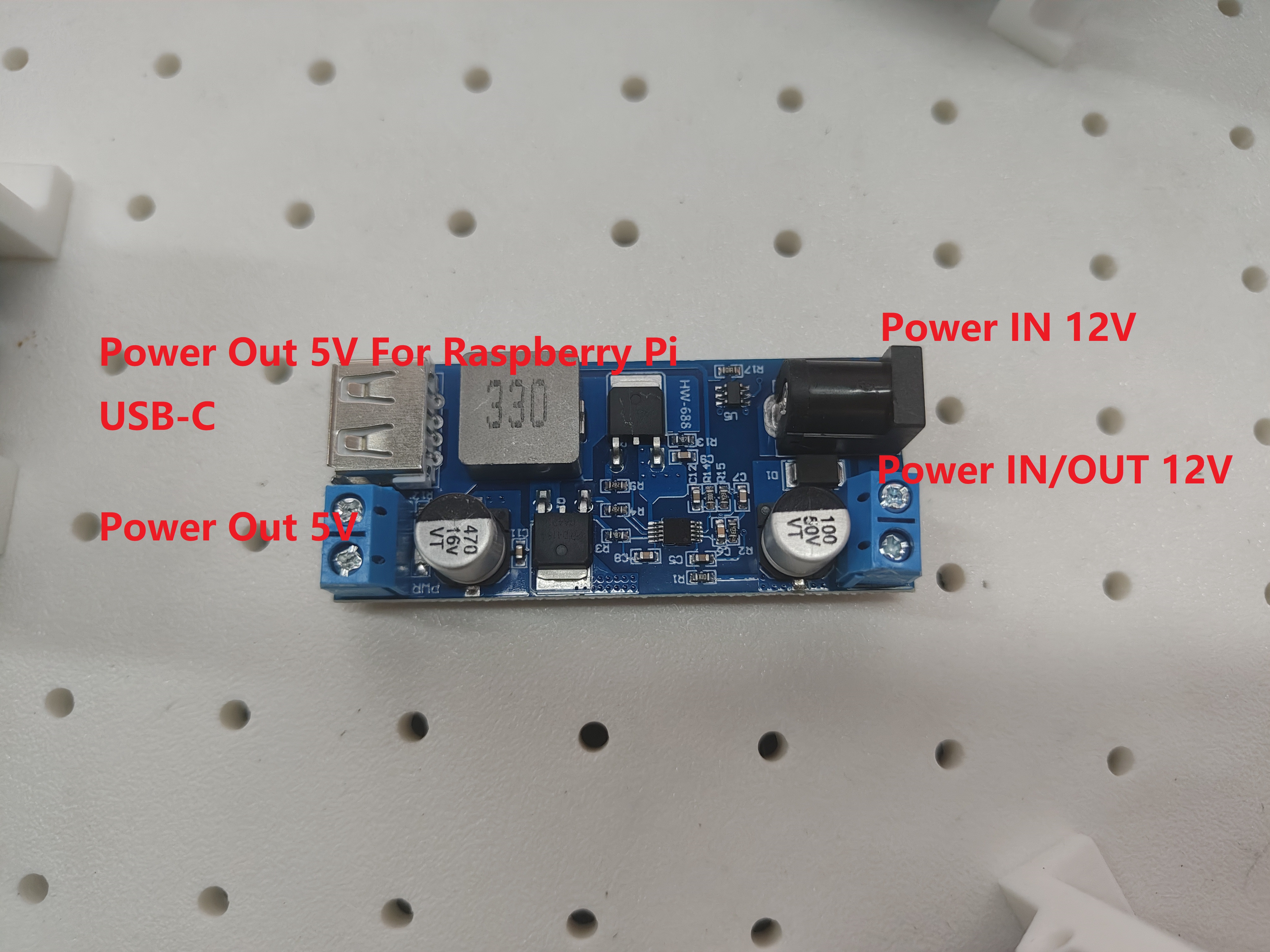
LeKiwiシャーシのすべてのサーボモーターには12V電源が必要です。5Vロボットアームをお持ちのユーザーには、12Vから5Vへの降圧コンバーターモジュールを提供します。回路の改造が必要になることにご注意ください。
-
12V電源 - 必要に応じてチェックアウト時にこのオプションを選択できます。すでに12V電源をお持ちの場合は、このオプションをスキップして、電源の出力コネクタを5521 DCプラグに変換するだけで済みます。
-
Raspberry Piコントローラーとカメラ - これらは注文インターフェースを通じて別途購入する必要があります。
仕様
| タイプ | Lekiwi |
|---|---|
| サーボモーター | 3x 12v STS3215 1:345 ギア比 |
| 電源 | 12V DCまたはバッテリー |
| 角度センサー | 12ビット磁気エンコーダー |
| 推奨動作温度範囲 | 0℃~40℃ |
| 通信方式 | UART |
| 制御方式 | PC |
部品表(BOM)
| 部品 | 数量 | 含まれる |
|---|---|---|
| STS3215 1:345 12V サーボモーター | 3 | ✅ |
| 全方向車輪/ユニバーサル車輪 | 3 | ✅ |
| Lekiwi 3Dプリント筐体 | 1 | ✅ |
| DC-DC降圧電源モジュール - 24V/12Vから5V | 1 | ✅ |
| モーター制御ボード | 1 | ✅ |
| DCオスからデュアルDCオス5521 Yケーブル | 1 | ✅ |
| USBケーブル;Type C 2.0からType C 2.0-ブラック;L150mm | 1 | ✅ |
| USB 3.1 Type CからAケーブル 0.5メートル | 1 | ✅ |
| プラグ電源アダプター;ブラック-12V-2A AC/DC | 1 | ✅ |
| M2 M3 M4 各種ネジ | 十分 | ✅ |
| Raspberry pi | 1 | オプション |
| USBカメラ | 1 | オプション |
| 深度カメラ | 2 | オプション |
| SO-ARM101 Pro | 1 | オプション |
| 12V大容量リチウムイオンバッテリーパック E326S | 1 | オプション |
初期システム環境
Ubuntu x86の場合:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
Jetson Orinの場合:
- Jetson JetPack 6.0+
- Python 3.10
- Torch 2.6
Raspberry Piの場合:
- Raspberry Pi5 4G~16G
3Dプリントガイド
パーツ
以下の3Dプリント部品用のプリント準備済みSTLファイルを提供しています。これらは一般的なPLAフィラメントを使用してコンシューマーグレードのFDMプリンターで印刷できます。Bambu Lab P1Sプリンターでテストしました。すべてのコンポーネントについて、bambuslicer に読み込み、自動回転と自動配置を行い、推奨されるサポートを有効にして印刷します。
| アイテム | 数量 | 注記 |
|---|---|---|
| ベースプレート上部 | 1 | |
| ベースプレート下部 | 1 | |
| 駆動モーターマウント | 3 | |
| サーボホイールハブ | 3 | サポートを使用 |
| RasPiケース上部 | 1 | 2 |
| RasPiケース下部 | 1 | |
| Arducam ベースマウントとリストマウント | 1 | このカメラと互換性あり |
| Webカメラ ベースマウント、グリッパーインサート、リストマウント | 1 | このカメラと互換性あり |
プリントパラメーター
提供されるSTLファイルは多くのFDMプリンターでプリント準備ができています。以下はテスト済みで推奨される設定ですが、他の設定でも動作する可能性があります。
- 材料:PLA+
- ノズル径と精度:0.2mmノズル径、0.2mmレイヤー高さ
- 充填密度:15%
- プリント速度:150 mm/s
- 必要に応じて、Gコード(スライスファイル)をプリンターにアップロードして印刷
LeRobotのインストール
Raspberry Pi上で:
1. Minicondaのインストール
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
2. シェルの再起動
シェルにコピー&ペースト:source ~/.bashrc またはMacの場合:source ~/.bash_profile またはzshellを使用している場合は source ~/.zshrc
3. lerobot用の新しいconda環境を作成してアクティベート
conda create -y -n lerobot python=3.10
次にconda環境をアクティベートします(lerobotを使用するためにシェルを開くたびにこれを実行してください!):
conda activate lerobot
4. LeRobotのクローン
git clone https://github.com/huggingface/lerobot.git ~/lerobot
5. 環境にffmpegをインストール
minicondaを使用する場合、環境にffmpegをインストールします:
conda install ffmpeg -c conda-forge
6. feetechモーター用の依存関係を含むLeRobotのインストール
cd ~/lerobot && pip install -e ".[lekiwi]"
ラップトップ(PC)にLeRobotをインストール
すでにラップトップにLeRobotをインストールしている場合は、このステップをスキップできます。そうでなければ、Piで行ったのと同じステップに従ってください。
コマンドプロンプト(cmd)をかなり多く使用します。cmdの使用に慣れていない場合や、コマンドラインの使用を復習したい場合は、こちらをご覧ください:コマンドライン集中講座
コンピューター上で:
1. Minicondaのインストール
2. シェルの再起動
シェルにコピー&ペースト:source ~/.bashrc またはMacの場合:source ~/.bash_profile またはzshellを使用している場合は source ~/.zshrc
3. lerobot用の新しいconda環境を作成してアクティベート
conda create -y -n lerobot python=3.10
次にconda環境をアクティベートします(lerobotを使用するためにシェルを開くたびにこれを実行してください!):
conda activate lerobot
4. LeRobotのクローン
git clone https://github.com/huggingface/lerobot.git ~/lerobot
5. 環境にffmpegをインストール
minicondaを使用する場合、環境にffmpegをインストールします:
conda install ffmpeg -c conda-forge
6. feetechモーター用の依存関係を含むLeRobotのインストール
cd ~/lerobot && pip install -e ".[lekiwi]"
組み立て
Lekiwiの組み立て
ビデオチュートリアル
以下は写真チュートリアルです
公式の組み立てチュートリアルを参照できます。
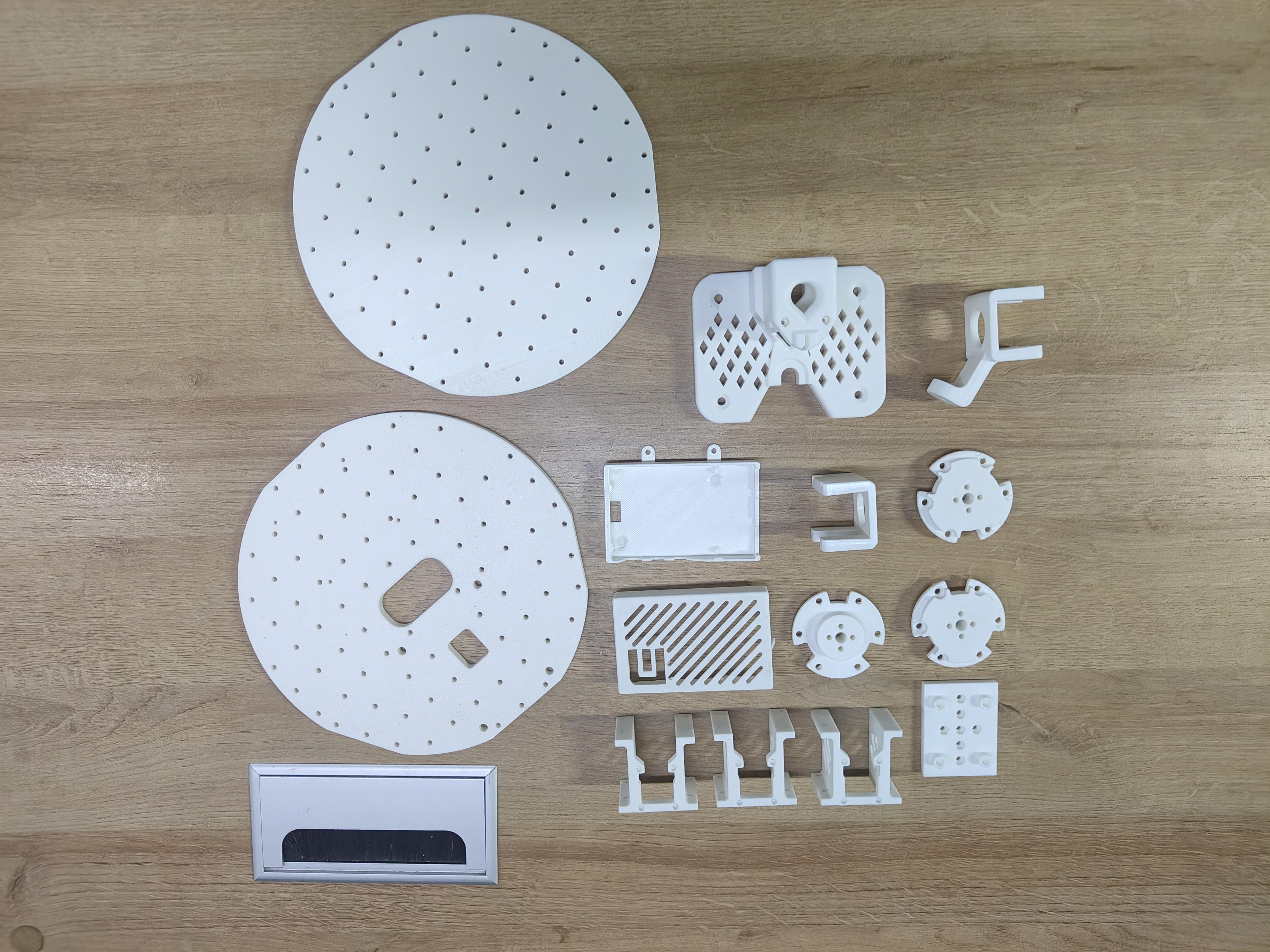
印刷されたパーツを受け取ったら、すべての印刷コンポーネントは以下のようになります。
A. 12本のm2x6タップスクリューを使用して、駆動モーターをモーターマウントに取り付けます。
| ステップ 1 | ステップ 2 |
|---|---|
 |  |
B. 12本のm3x16機械ねじを使用して、駆動モーターマウントを底面ベースプレートにねじ込みます。
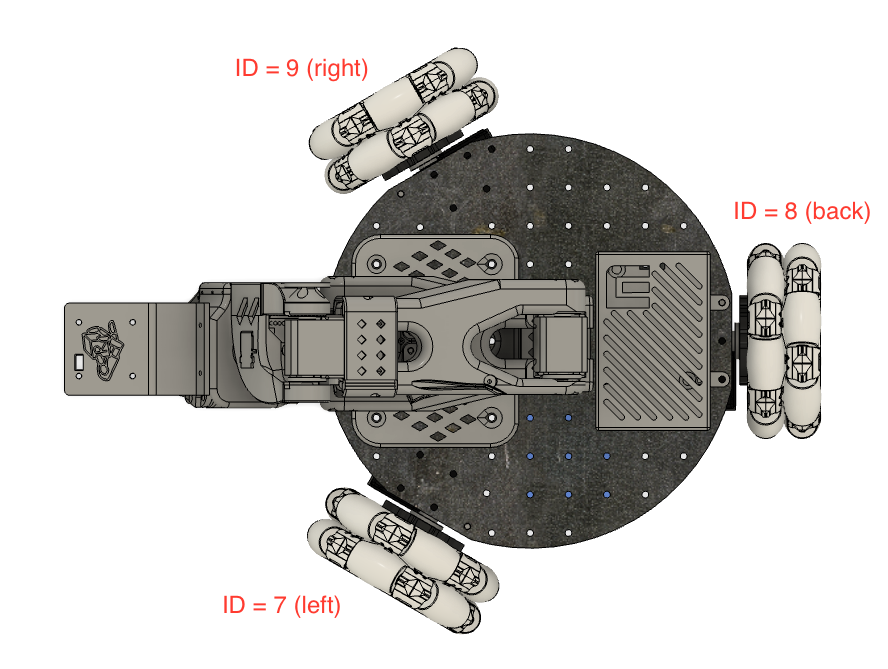
ID配置を覚えておいてください:8は後輪を表し、7と9はそれぞれ左前輪と右前輪に対応します。
| ステップ 1 | ステップ 2 |
|---|---|
 |  |
C. ホイールハブをオムニホイールに取り付けます。
ステップ1とステップ2:3本のねじを取り外します。
| ステップ 1 | ステップ 2 |
|---|---|
 |  |
ステップ3とステップ4:9本のm4x18機械ねじを使用して、ホイールハブをオムニホイールに取り付けます。
| ステップ 3 | ステップ 4 |
|---|---|
 |  |
D. 6本のm3x16機械ねじを使用して、サーボホーンをホイールハブに取り付けます。
| ステップ 1 | ステップ 2 | ステップ 3 |
|---|---|---|
 |  |  |
E. 3本のm3x10機械ねじを使用して、サーボホーンを駆動モーターに取り付けます。
| ステップ 1 | ステップ 2 | ステップ 3 |
|---|---|---|
 |  |  |
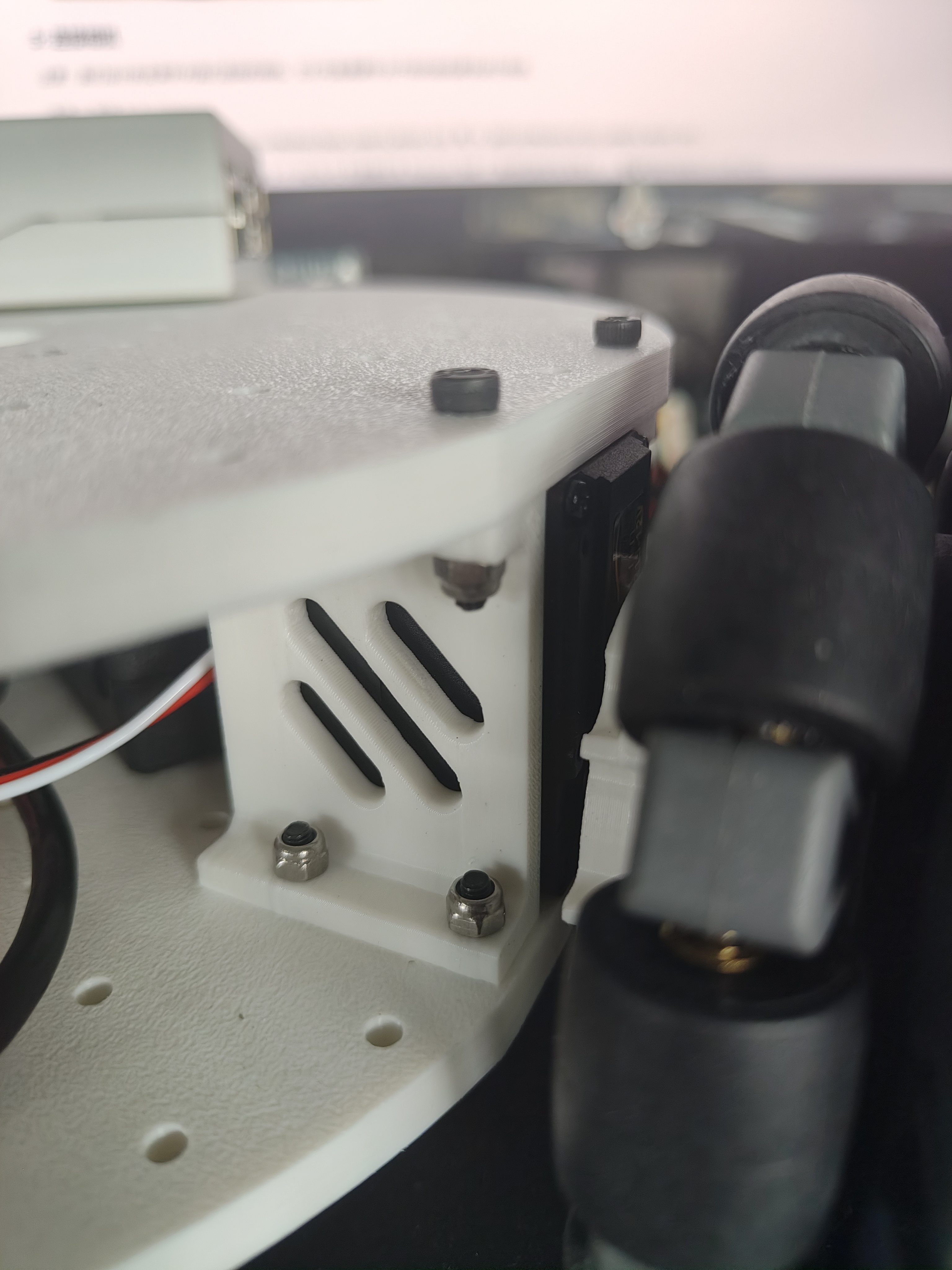
H. サーボドライバーを追加し、すべての回路を接続します。
| ステップ 1 | ステップ 2 | ステップ 3 | ステップ 4 |
|---|---|---|---|
 |  |  |  |
| ステップ 5 | ステップ 6 | ステップ 7 | ステップ 8 |
|---|---|---|---|
 |  |  |  |
Power INはステップ8のように電源に直接接続し、USB-CポートはRaspberry Piに5V電源を供給します。
追加の**2ピン端子(5V & 12V)**について:
- 7.4V SO10xロボットアームを使用する場合は、5V出力経由でサーボモーターボードに電源を供給します。
- 12Vロボットアームを使用する場合は、ステップ8のようにDCパワースプリッターから直接サーボモーターボードに電源を供給します。
I. これで、Raspberry Piを車両の2層目のトッププレートに取り付けることができます。その前に、USB-C電源ケーブルとUSB-Cサーボモーター通信ケーブルの両方を接続し、車両のトップパネルから外に配線してください。
ステップ1 電源ケーブルをRaspberry Piに接続し、トップパネルの中央開口部を通して配線します。
 |  |  |
ステップ2 シャーシ内の3つのサーボモーターのうち、1つのサーボには1本のケーブルのみが接続されています。SO10xロボットアームを取り付ける必要がある場合は、以下を行ってください:ロボットアームからID1ケーブルを取り外します。シャーシモーターに接続します。予備ケーブルとしてトップパネルを通して配線します。
 |  |  |
ステップ3 これで、サーボドライバーボードからのUSB-CをRaspberry PiのUSBポートに接続できます。
 |  |
J. 12本のM3×16ねじを使用して、Raspberry Piとトッププレートの残りの部品を固定する必要があります。
 |  |  |
K. 1本のM3x16と4本のM5×25ねじを使用して、USBカメラとフォロワーアームを取り付けることができます。
 |  |  |
|  |  |
そして、サーボ制御ケーブルとUSBカメラの両方がRaspberry Piに接続されていることを確認してください。
|
回路接続を確認してください。組み立て後、Lekiwiは開発ボード(Raspberry Pi / Jetson)に接続する必要があります。リーダーアームはPCに接続する必要があります。
| Lekiwi --> Raspberry Pi / Jetson |
| リーダーアーム --> PC |
モーターの設定
リーダーアーム
各バスサーボアダプターのポートを見つけるには、このスクリプトを実行してください:
lerobot-find-port
出力例:
Finding all available ports for the MotorBus.
['/dev/tty.usbmodem575E0032081']
Remove the USB cable from your MotorsBus and press Enter when done.
[...Disconnect corresponding leader or follower arm and press Enter...]
The port of this MotorsBus is /dev/tty.usbmodem575E0032081
Reconnect the USB cable.
ポートを識別する際の出力例(例:Macでは/dev/tty.usbmodem575E0031751、Linuxでは/dev/ttyACM0の可能性があります):
ポートを識別する際の出力例(例:/dev/tty.usbmodem575E0032081、またはLinuxでは/dev/ttyACM1の可能性があります):
Finding all available ports for the MotorBus.
['/dev/tty.usbmodem575E0032081']
Remove the USB cable from your MotorsBus and press Enter when done.
USBを取り外してからEnterキーを押すことを忘れないでください。そうしないとインターフェースが検出されません。
トラブルシューティング:Linuxでは、以下を実行してUSBポートへのアクセス権を付与する必要がある場合があります:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
Lekiwi
前のコマンドに従って正しいUSBを見つけ、モーターを設定する必要があります。
モーターの設定手順は、SO101のドキュメント(リーダーアームと同じ)で確認できます。アームモーターのIDに加えて、モバイルベース用のモーターIDも設定する必要があります。これらは動作するために特定の順序である必要があります。以下は、モバイルベースのモーターIDとモーター取り付け位置の画像です。LeKiwiでは1つのモーター制御ボードのみを使用することに注意してください。これは、ホイールのモーターIDが7、8、9であることを意味します。
このコマンドを実行してLeKiwiのモーターをセットアップできます。最初にアーム用のモーター(id 6..1)をセットアップし、次にホイール用のモーター(9,8,7)をセットアップします。
lerobot-setup-motors \
--robot.type=lekiwi \
--robot.port=/dev/tty.usbmodem58760431551 # <- paste here the port found at previous step
キャリブレーション
次に、リーダーアームとフォロワーアームをキャリブレーションする必要があります。ホイールモーターはキャリブレーションする必要がありません。キャリブレーションプロセスは非常に重要で、1つのロボットで訓練されたニューラルネットワークが別のロボットでも動作することを可能にします。
フォロワーアームのキャリブレーション(モバイルベース上)
アームがRaspberry Piに接続されていることを確認し、このスクリプトまたはAPIサンプル(SSH経由でRaspberry Pi上で)を実行してフォロワーアームのキャリブレーションを開始します:
lerobot-calibrate \
--robot.type=lekiwi \
--robot.id=my_awesome_kiwi # <- Give the robot a unique name
ほとんどのロボットでキャリブレーション方法を統一したため、このSO100アームのキャリブレーション手順はKochやSO101の手順と同じです。まず、各関節がその可動範囲の中央にある位置にロボットを移動させ、Enterを押します。次に、すべての関節を可動範囲全体で動かします。SO101での同じプロセスの参考動画はこちらで見ることができます。
有線版
有線版のLeKiwiをお持ちの場合は、すべてのコマンドをラップトップで実行してください。
リーダーアームのキャリブレーション
次に、リーダーアーム(ラップトップ/PCに接続されている)をキャリブレーションします。ラップトップで以下のコマンドまたはAPIサンプルを実行してください:
lerobot-calibrate \
--teleop.type=so100_leader \
--teleop.port=/dev/tty.usbmodem58760431551 \ # <- The port of your robot
--teleop.id=my_awesome_leader_arm # <- Give the robot a unique name
LeKiwiのテレオペレーション
Macを使用している場合、Terminalにキーボードへのアクセス許可を与える必要があるかもしれません。System Preferences > Security & Privacy > Input Monitoringに移動し、Terminalのチェックボックスをオンにしてください。
テレオペレーションするには、Raspberry PiにSSHで接続し、conda activate lerobotを実行してからこのスクリプトを実行します:
python -m lerobot.robots.lekiwi.lekiwi_host --robot.id=my_awesome_kiwi
次に、ラップトップでもconda activate lerobotを実行し、APIサンプルを実行します。examples/lekiwi/teleoperate.pyで正しいremote_ipとportを設定してください。

python examples/lekiwi/teleoperate.py
ラップトップで次のような表示が見えるはずです:[INFO] Connected to remote robot at tcp://172.17.133.91:5555 and video stream at tcp://172.17.133.91:5556. これで、リーダーアームを動かし、キーボード(w,a,s,d)を使って前進、左、後退、右に運転できます。また、(z,x)を使って左右に回転できます。(r,f)を使ってモバイルロボットの速度を上げたり下げたりできます。3つの速度モードがあります。下の表を参照してください:
| 速度モード | 直線速度 (m/s) | 回転速度 (deg/s) |
|---|---|---|
| 高速 | 0.4 | 90 |
| 中速 | 0.25 | 60 |
| 低速 | 0.1 | 30 |
| キー | 動作 |
|---|---|
| W | 前進 |
| A | 左移動 |
| S | 後退 |
| D | 右移動 |
| Z | 左回転 |
| X | 右回転 |
| R | 速度上昇 |
| F | 速度低下 |
異なるキーボードを使用している場合は、LeKiwiRobotConfigで各コマンドのキーを変更できます。
有線版
有線版のLeKiwiをお持ちの場合は、これらのテレオペレーションコマンドを含むすべてのコマンドをラップトップで実行してください。
通信のトラブルシューティング
Mobile SO100への接続に問題がある場合は、以下の手順に従って問題を診断し解決してください。
1. IPアドレス設定の確認
設定ファイルでPiの正しいIPが設定されていることを確認してください。Raspberry PiのIPアドレスを確認するには、(Piのコマンドラインで)以下を実行します:
hostname -I
2. ラップトップ/PCからPiに到達可能かチェック
ラップトップからRaspberry Piにpingしてみてください:
ping <your_pi_ip_address>
pingが失敗する場合:
- Piの電源が入っており、同じネットワークに接続されていることを確認してください。
- PiでSSHが有効になっているかチェックしてください。
3. SSH接続を試す
PiにSSHできない場合、適切に接続されていない可能性があります。以下を使用してください:
ssh <your_pi_user_name>@<your_pi_ip_address>
接続エラーが発生する場合:
-
以下を実行してPiでSSHが有効になっていることを確認してください:
sudo raspi-config次に、Interfacing Options -> SSHに移動して有効にしてください。
4. 同じ設定ファイル
ラップトップ/PCとRaspberry Piの両方で設定ファイルが同じであることを確認してください。
データセットの記録
テレオペレーションに慣れたら、LeKiwiで最初のデータセットを記録できます。
データセットのアップロードにはHugging Face hubの機能を使用します。以前にHubを使用したことがない場合は、書き込みアクセストークンを使用してCLI経由でログインできることを確認してください。このトークンはHugging Face設定から生成できます。
以下のコマンドを実行してCLIにトークンを追加してください:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
次に、Hugging Faceリポジトリ名を変数に保存します:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
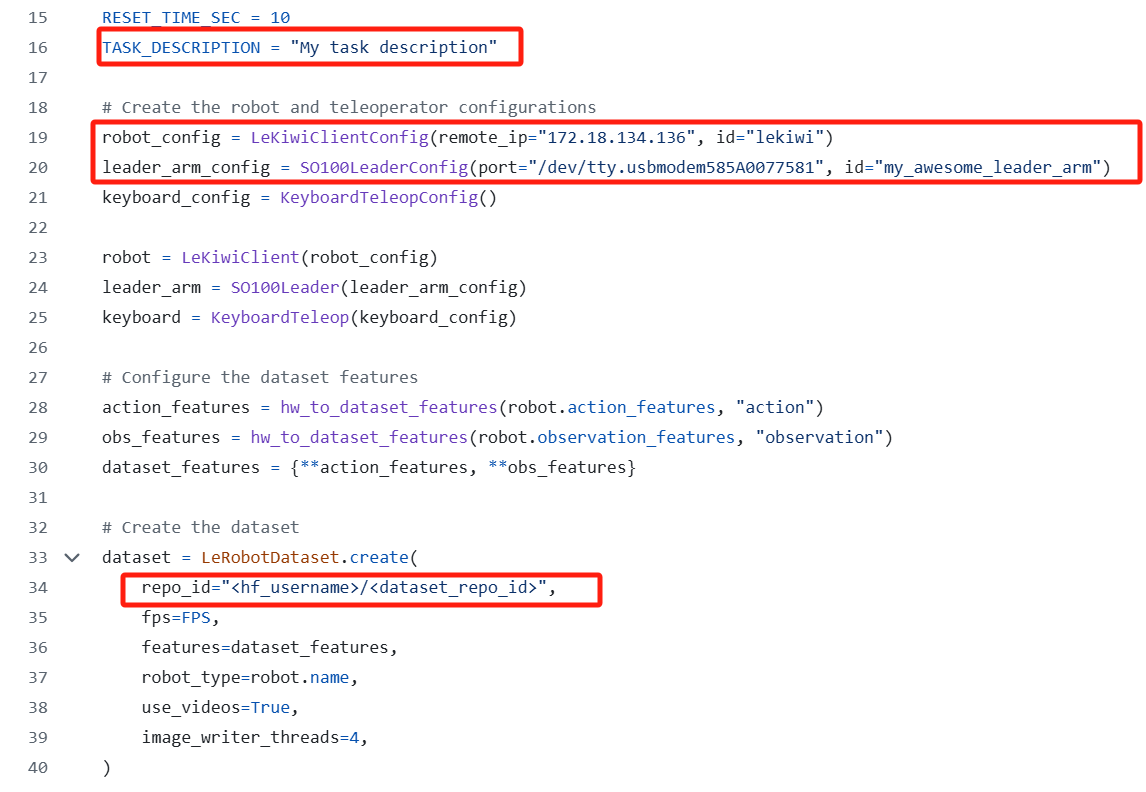
これでデータセットを記録できます。エピソードを記録してデータセットをhubにアップロードするには、LeKiwi用にカスタマイズされたこのAPIサンプルを実行してください。まず、スクリプト内のremote_ip、repo_id、port、taskを適応させてください。スクリプトをより長時間実行したい場合は、NB_CYCLES_CLIENT_CONNECTIONを増やすことができます。
python examples/lekiwi/record.py
データセットのアップロード
ローカルでは、データセットはこのフォルダに保存されます:~/.cache/huggingface/lerobot/{repo-id}。データ記録の終了時に、データセットはあなたのHugging Faceページ(例:https://huggingface.co/datasets/cadene/so101_test)にアップロードされます。このページは以下を実行することで取得できます:
echo https://huggingface.co/datasets/${HF_USER}/so101_test
データセットは自動的にLeRobotタグが付けられ、コミュニティが簡単に見つけられるようになります。また、カスタムタグ(この場合は例としてtutorial)も追加できます。
hub上の他のLeRobotデータセットは、LeRobotタグを検索することで見つけることができます。
データ収集のコツ
データ記録に慣れたら、トレーニング用のより大きなデータセットを作成できます。良い開始タスクは、異なる場所でオブジェクトを掴み、ビンに置くことです。少なくとも50エピソード、場所ごとに10エピソードを記録することをお勧めします。カメラを固定し、記録全体を通して一貫した掴み動作を維持してください。また、操作しているオブジェクトがカメラに映っていることを確認してください。良い経験則は、カメラ画像だけを見てタスクを自分で実行できることです。
以下のセクションでは、ニューラルネットワークをトレーニングします。信頼性の高い掴み性能を達成した後、追加の掴み場所、異なる掴み技術、カメラ位置の変更など、データ収集中により多くのバリエーションを導入し始めることができます。
結果に悪影響を与える可能性があるため、あまりにも早く多くのバリエーションを追加することは避けてください。
この重要なトピックについてより深く掘り下げたい場合は、良いデータセットとは何かについて書いたブログ投稿をチェックできます。
トラブルシューティング
Linuxで、データ記録中に左右の矢印キーとエスケープキーが効果がない場合は、$DISPLAY環境変数が設定されていることを確認してください。pynputの制限を参照してください。
有線版
有線版のLeKiwiをお持ちの場合は、これらのデータセット記録コマンドを含むすべてのコマンドをラップトップで実行してください。
エピソードの再生
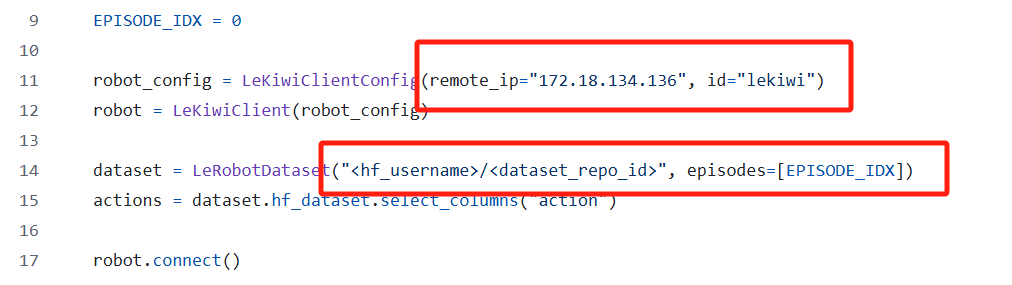
エピソードを再生するには、以下のAPIサンプルを実行してください。remote_ip、port、LeRobotDatasetId、エピソードインデックスを変更してください。ファイルはexamples/lekiwi/replay.pyのパスにあります。
以下のコマンドを実行してください:
python examples/lekiwi/replay.py
ポリシーのトレーニング
ロボットを制御するポリシーをトレーニングするには、python lerobot/scripts/train.pyスクリプトを使用します。いくつかの引数が必要です。以下はコマンドの例です:
lerobot-train \
--dataset.repo_id=${HF_USER}/lekiwi_test \
--policy.type=act \
--output_dir=outputs/train/act_lekiwi_test \
--job_name=act_lekiwi_test \
--policy.device=cuda \
--wandb.enable=true # You can choose false if you don't need wandb
説明しましょう:
--dataset.repo_id=${HF_USER}/lekiwi_testでデータセットを引数として提供しました。policy.type=actでポリシーを提供しました。これはconfiguration_act.pyから設定を読み込みます。重要なことに、このポリシーはデータセットに保存されているロボットのモーター状態数、モーターアクション数、カメラ数(例:laptopとphone)に自動的に適応します。- Nvidia GPUでトレーニングしているため
policy.device=cudaを提供しましたが、Apple siliconでトレーニングする場合はpolicy.device=mpsを使用できます。 - トレーニングプロットを可視化するためにWeights and Biasesを使用する
wandb.enable=trueを提供しました。これはオプションですが、使用する場合はwandb loginを実行してログインしていることを確認してください。
トレーニングには数時間かかります。チェックポイントはoutputs/train/act_lekiwi_test/checkpointsに保存されます。
ポリシーの評価
ポリシーを評価するにはevaluate.py APIサンプルを実行してください。remote_ip、port、モデルなどを変更することを忘れずに。
パスはexamples/lekiwi/evaluate.pyです。
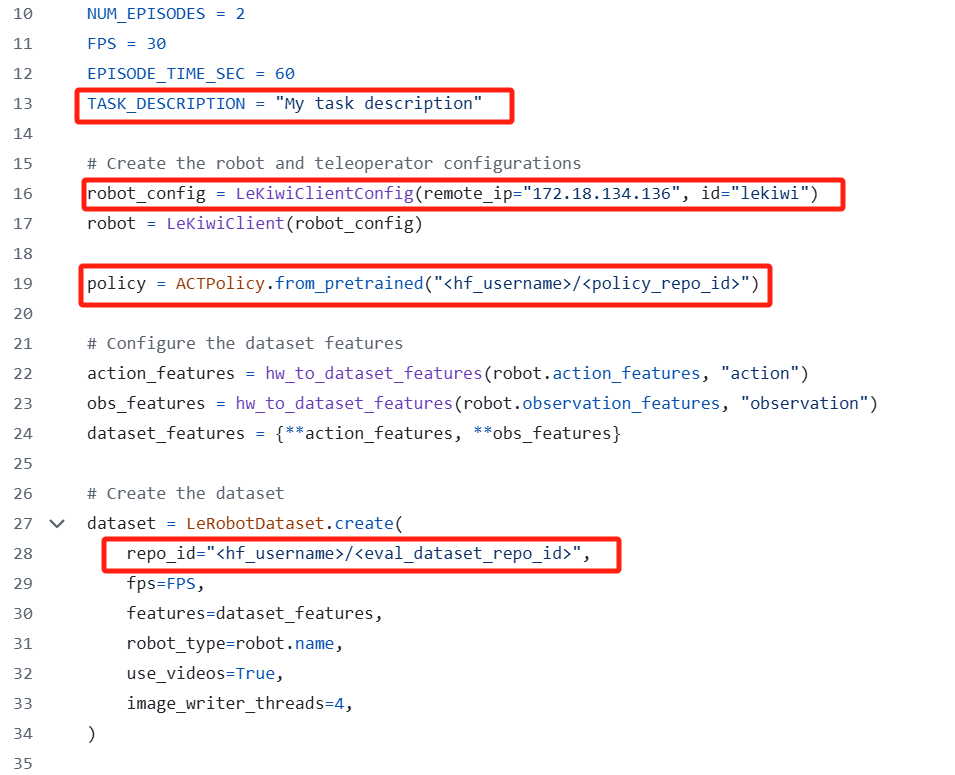
python examples/lekiwi/evaluate.py
ご覧のとおり、これは以前にトレーニングデータセットを記録するために使用したコマンドとほぼ同じです。2つの点が変更されました:
- ポリシーチェックポイントへのパスを示す追加の
policy引数があります(例:outputs/train/eval_act_lekiwi_test/checkpoints/last/pretrained_model)。モデルチェックポイントをハブにアップロードした場合は、モデルリポジトリも使用できます(例:${HF_USER}/act_lekiwi_test)。 - データセット名は推論を実行していることを反映するために
evalで始まります(例:${HF_USER}/eval_act_lekiwi_test)。
ヘルプ 🙋
ハードウェアの問題については、カスタマーサービスにお問い合わせください。使用方法に関する質問は、Discordにご参加ください。
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。