SO-ARM100およびSO-ARM101ロボットアームとLeRobotの入門ガイド
はじめに
SO-10xARMは、TheRobotStudioによって開始された完全にオープンソースのロボットアームプロジェクトです。フォロワーアームとリーダーロボットアームが含まれており、詳細な3Dプリントファイルと操作ガイドも提供されています。LeRobotは、PyTorchで実世界のロボティクス向けのモデル、データセット、ツールを提供することに取り組んでいます。その目的は、ロボティクスの参入障壁を下げ、誰もがデータセットと事前訓練されたモデルの共有に貢献し、恩恵を受けることができるようにすることです。LeRobotは、実世界での応用に検証された最先端の方法論を統合し、模倣学習を中心としています。事前訓練されたモデルのスイート、人間が収集したデモンストレーションを特徴とするデータセット、シミュレーション環境を提供し、ユーザーがロボットの組み立ての必要なしに開始できるようにしています。今後数週間で、現在利用可能な最もコスト効率的で有能なロボットでの実世界のロボティクスのサポートを拡張する予定です。
プロジェクト紹介
SO-ARM10xとreComputer Jetson AIインテリジェントロボットキットは、高精度ロボットアーム制御と強力なAIコンピューティングプラットフォームをシームレスに組み合わせ、包括的なロボット開発ソリューションを提供します。このキットは、Jetson OrinまたはAGX Orinプラットフォームをベースとし、SO-ARM10xロボットアームとLeRobot AIフレームワークを組み合わせて、教育、研究、産業自動化などの複数のシナリオに適用可能なインテリジェントロボットシステムをユーザーに提供します。 このwikiは、SO ARM10xの組み立てとデバッグのチュートリアルを提供し、Lerobotフレームワーク内でのデータ収集とトレーニングを実現します。

主な特徴
- オープンソースで低コスト:TheRobotStudioからのオープンソース、低コストロボットアームソリューションです
- LeRobotとの統合:LeRobotプラットフォームとの統合のために設計されています
- 豊富な学習リソース:組み立てとキャリブレーションガイド、テスト、データ収集、トレーニング、デプロイメントのチュートリアルなど、包括的なオープンソース学習リソースを提供し、ユーザーが迅速に開始してロボットアプリケーションを開発できるよう支援します。
- Nvidiaとの互換性:reComputer Mini J4012 Orin NX 16 GBでこのアームキットをデプロイします。
- マルチシーン応用:教育、科学研究、自動化生産、ロボティクスなどの分野に適用可能で、ユーザーが様々な複雑なタスクで効率的で精密なロボット操作を実現するのに役立ちます。
新機能:
- 配線の最適化:SO-ARM100と比較して、SO-ARM101は配線が改善され、以前にジョイント3で見られた切断問題を防ぎます。新しい配線設計により、ジョイントの可動範囲も制限されなくなりました。
- リーダーアームの異なるギア比:リーダーアームは最適化されたギア比のモーターを使用し、性能を向上させ、外部ギアボックスの必要性を排除しました。
- 新機能サポート:リーダーアームがフォロワーアームをリアルタイムで追従できるようになりました。これは、人間がロボットの動作に介入して修正できる今後の学習ポリシーにとって重要です。
Seeed Studioは、ハードウェア自体の品質についてのみ責任を負います。チュートリアルは公式ドキュメントに厳密に従って更新されます。解決できないソフトウェアの問題や環境依存の問題に遭遇した場合は、このチュートリアルの最後にあるFAQセクションを確認することに加えて、LeRobotプラットフォームまたはLeRobot Discordチャンネルに問題を速やかに報告してください。
仕様
| タイプ | SO-ARM100 | SO-ARM101 | ||
|---|---|---|---|---|
| Arm Kit | Arm Kit Pro | Arm Kit | Arm Kit Pro | |
| リーダーアーム | 全ジョイント用の1:345ギア比を持つ12x ST-3215- C001 (7.4V) モーター | 全ジョイント用の1:345ギア比を持つ12x ST-3215-C018/ST-3215-C047 (12V) モーター | ジョイント2のみ用の1:345ギア比を持つ1x ST-3215- C001 (7.4V) モーター | |
| フォロワーアーム | SO-ARM100と同じ | |||
| 電源 | 5.5 mm × 2.1 mm DC 5 V 4 A | 5.5 mm × 2.1 mm DC 12 V 2 A | 5.5 mm × 2.1 mm DC 5 V 4 A | 5.5 mm × 2.1 mm DC 12 V 2 A(フォロワーアーム) |
| 角度センサー | 12ビット磁気エンコーダー | |||
| 推奨動作温度 | 0 °C から 40 °C | |||
| 通信 | UART | |||
| 制御方法 | PC | |||
Arm Kitバージョンを購入した場合、両方の電源は5Vです。Arm Kit Proバージョンを購入した場合は、リーダーロボットアームのキャリブレーションとすべてのステップに5V電源を使用し、フォロワーロボットアームのキャリブレーションとすべてのステップに12V電源を使用してください。
部品表(BOM)
| 部品 | 数量 | 含まれる |
|---|---|---|
| サーボモーター | 12 | ✅ |
| モーター制御ボード | 2 | ✅ |
| USB-Cケーブル 2本 | 1 | ✅ |
| 電源2 | 2 | ✅ |
| テーブルクランプ | 4 | ✅ |
| アームの3Dプリント部品 | 1 | オプション |
初期システム環境
Ubuntu x86の場合:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6+
Jetson Orinの場合:
- Jetson JetPack 6.0および6.1、6.1はサポートされていません
- Python 3.10
- Torch 2.3+
目次
3Dプリントガイド
SO101の公式アップデートに従い、SO100はもはやサポートされず、公式によるとソースファイルは削除されますが、ソースファイルは依然として私たちのMakerworldで見つけることができます。ただし、以前にSO100を購入したユーザーについては、チュートリアルとインストール方法は引き続き互換性があります。SO101のプリントは、SO100のモーターキットインストールと完全に互換性があります。
ステップ1:プリンターを選択する
提供されるSTLファイルは、多くのFDMプリンターでプリント可能です。以下はテスト済みで推奨される設定ですが、他の設定でも動作する可能性があります。
- 材料:PLA+
- ノズル径と精度:0.2mmレイヤー高さでの0.4mmノズル径、または0.4mmレイヤー高さでの0.6mmノズル。
- インフィル密度:15%
ステップ2:プリンターをセットアップする
- プリンターが校正され、ベッドレベルがプリンター固有の指示に従って正しく設定されていることを確認してください。
- プリントベッドを清掃し、ほこりや油脂がないことを確認してください。水やその他の液体でベッドを清掃した場合は、ベッドを乾燥させてください。
- プリンターが推奨する場合は、標準的なグルースティックを使用し、ベッドのプリント領域全体に薄く均一にグルーを塗布してください。塊や不均一な塗布は避けてください。
- プリンター固有の指示に従ってプリンターフィラメントをロードしてください。
- プリンター設定が上記で推奨されたものと一致することを確認してください(ほとんどのプリンターには複数の設定があるため、最も近いものを選択してください)。
- 水平面に対して45度を超える傾斜は無視して、すべての場所にサポートを設定してください。
- 水平軸を持つネジ穴にはサポートがないようにしてください。
ステップ3:パーツを印刷する
リーダーまたはフォロワーのすべてのパーツは、簡単な3Dプリント用に既に単一ファイルに含まれており、サポートを最小限に抑えるためにz軸上向きに正しく配向されています。
-
220mmx220mmのプリンターベッドサイズ(Enderなど)の場合、これらのファイルを印刷してください:
-
205mm x 250mmのプリンターベッドサイズ(Prusa/Upなど)の場合:
LeRobotをインストールする
pytorchやtorchvisionなどの環境は、お使いのCUDAに基づいてインストールする必要があります。
- Minicondaをインストール: Jetson用:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
または、X86 Ubuntu 22.04用:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- lerobot用の新しいconda環境を作成してアクティベート
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Lerobotをクローン:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- minicondaを使用する場合、環境にffmpegをインストール:
conda install ffmpeg -c conda-forge
これは通常、libsvtav1エンコーダーでコンパイルされたプラットフォーム用のffmpeg 7.Xをインストールします。libsvtav1がサポートされていない場合(ffmpeg -encodersでサポートされているエンコーダーを確認)、以下のことができます:
- [すべてのプラットフォーム] 以下を使用してffmpeg 7.Xを明示的にインストール:
conda install ffmpeg=7.1.1 -c conda-forge
- [Linuxのみ] ffmpegビルド依存関係をインストールし、libsvtav1でソースからffmpegをコンパイルし、which ffmpegでインストールに対応するffmpegバイナリを使用していることを確認してください。
このようなエラーが発生した場合も、このコマンドを使用できます。
- feetechモーター用の依存関係を含むLeRobotをインストール:
cd ~/lerobot && pip install -e ".[feetech]"
Jetson Jetpack 6.0+デバイス用(このステップを実行する前に、ステップ5からPytorch-gpuとTorchvisionをインストールしていることを確認してください):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
- PytorchとTorchvisionを確認
pipを介してlerobot環境をインストールすると、元のPytorchとTorchvisionがアンインストールされ、PytorchとTorchvisionのCPUバージョンがインストールされるため、Pythonで確認を行う必要があります。
import torch
print(torch.cuda.is_available())
印刷された結果がFalseの場合、公式ウェブサイトのチュートリアルに従ってPytorchとTorchvisionを再インストールする必要があります。
Jetsonデバイスを使用している場合は、このチュートリアルに従ってPytorchとTorchvisionをインストールしてください。
モーターを設定する
- SO101
SO-ARM101のサーボ校正と初期化プロセスは、方法とコードの両方においてSO-ARM100と同じです。ただし、SO-ARM101リーダーアームの最初の3つの関節のギア比はSO-ARM100のものと異なるため、注意深く区別して校正することが重要です。
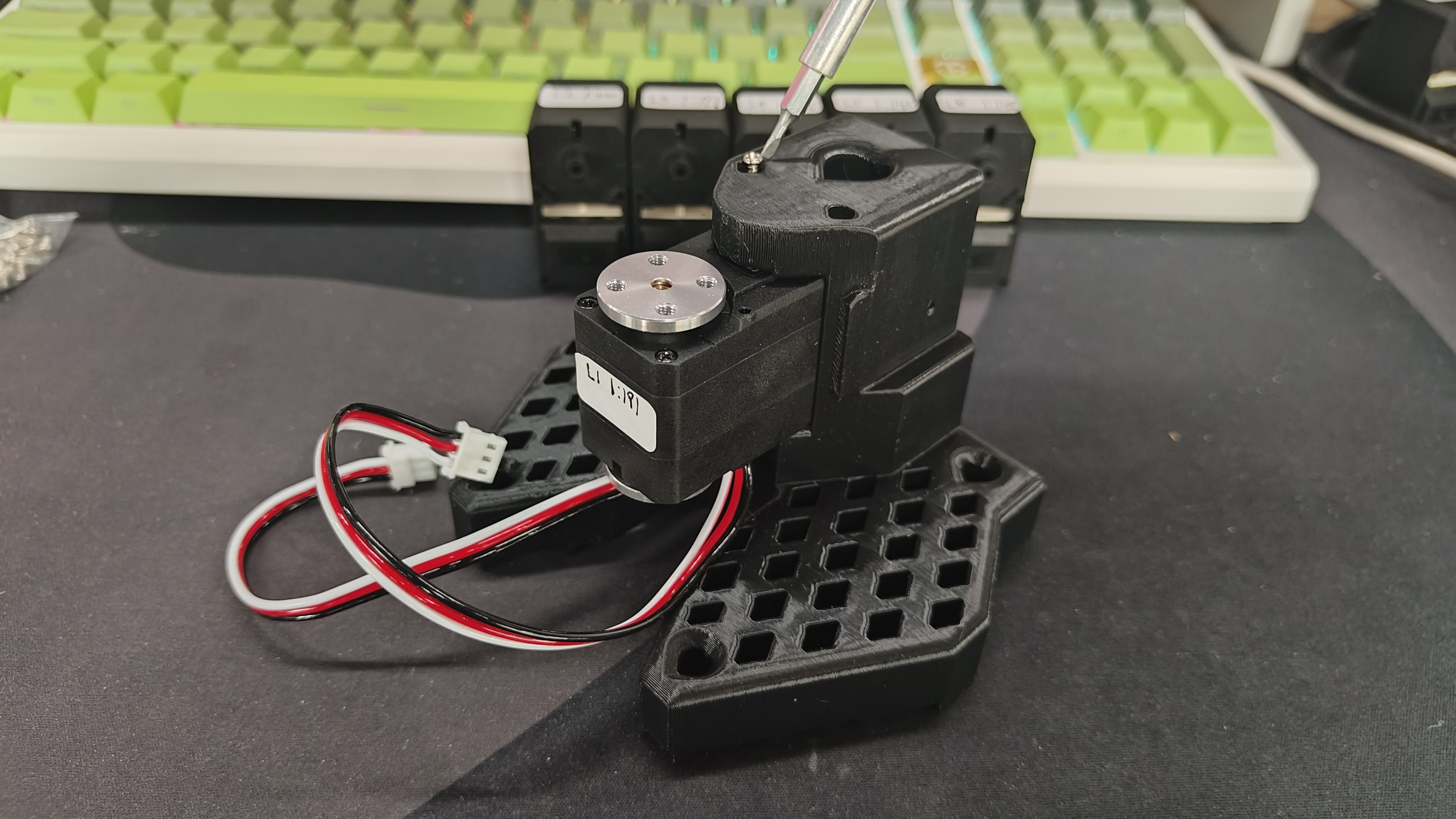
モーターを設定するには、リーダーアーム用に1つのバスサーボアダプターと6つのモーターを指定し、同様にフォロワーアーム用に他のバスサーボアダプターと6つのモーターを指定します。それらにラベルを付け、各モーターがフォロワーF用かリーダーL用か、そして1から6までのIDを書くと便利です。フォロワーアームの関節1から6を表すためにF1–F6を使用し、リーダーアームの関節1から6を表すためにL1–L6を使用します。対応するサーボモデル、関節の割り当て、ギア比の詳細は以下の通りです:
| サーボモデル | ギア比 | 対応する関節 |
|---|---|---|
| ST-3215-C044(7.4V) | 1:191 | L1 |
| ST-3215-C001(7.4V) | 1:345 | L2 |
| ST-3215-C044(7.4V) | 1:191 | L3 |
| ST-3215-C046(7.4V) | 1:147 | L4–L6 |
| ST-3215-C001(7.4V) / C018(12V) / C047(12V) | 1:345 | F1–F6 |
モーターバスに5Vまたは12Vの電源を接続してください。STS3215 7.4Vモーター用には5V、STS3215 12Vモーター用には12Vです。リーダーアームは常に7.4Vモーターを使用するため、12Vと7.4Vモーターがある場合は正しい電源を接続するよう注意してください。そうしないとモーターを焼損する可能性があります!次に、USBを介してモーターバスをコンピューターに接続します。USBは電力を供給しないため、電源とUSBの両方を接続する必要があることに注意してください。

以下はコード校正ステップです。上記の画像の参照配線サーボで校正してください
アームに関連するUSBポートを見つける 各アームの正しいポートを見つけるために、ユーティリティスクリプトを2回実行します:
lerobot-find-port
出力例:
Finding all available ports for the MotorBus.
['/dev/ttyACM0', '/dev/ttyACM1']
Remove the usb cable from your MotorsBus and press Enter when done.
[...Disconnect corresponding leader or follower arm and press Enter...]
The port of this MotorsBus is /dev/ttyACM1
Reconnect the USB cable.
USBを取り外すことを忘れないでください。そうしないとインターフェースが検出されません。
フォロワーアームのポートを識別する際の出力例(例:Macでは/dev/tty.usbmodem575E0031751、Linuxでは/dev/ttyACM0の可能性):
リーダーアームのポートを識別する際の出力例(例:/dev/tty.usbmodem575E0032081、またはLinuxでは/dev/ttyACM1の可能性):
以下を実行してUSBポートへのアクセス権を付与する必要がある場合があります:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
モーターを設定する
リーダーモーター(ST-3215-C046、C044、001)の校正には5V電源を使用してください。
| リーダーアーム関節6校正 | リーダーアーム関節5校正 | リーダーアーム関節4校正 | リーダーアーム関節3校正 | リーダーアーム関節2校正 | リーダーアーム関節1校正 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
アームキット版(ST-3215-C001)を購入した場合は、5V電源を使用してください。アームキットプロ版を購入した場合は、サーボ(ST-3215-C047/ST-3215-C018)の校正に12V電源を使用してください。
| フォロワーアーム関節6校正 | フォロワーアーム関節5校正 | フォロワーアーム関節4校正 | フォロワーアーム関節3校正 | フォロワーアーム関節2校正 | フォロワーアーム関節1校正 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
再度、サーボジョイントIDとギア比がSO-ARM101のものと厳密に対応していることを確認してください。
コンピュータからのUSBケーブルと電源をフォロワーアームのコントローラーボードに接続します。その後、以下のコマンドを実行してください。
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 # <- paste here the port found at previous step
以下の指示が表示されるはずです。
Connect the controller board to the 'gripper' motor only and press enter.
指示に従って、グリッパーのモーターを接続してください。ボードに接続されているモーターがそれだけであることを確認し、モーター自体がまだ他のモーターにデイジーチェーン接続されていないことを確認してください。[Enter]を押すと、スクリプトが自動的にそのモーターのIDとボーレートを設定します。
その後、以下のメッセージが表示されるはずです:
'gripper' motor id set to 6
続いて次の指示が表示されます:
Connect the controller board to the 'wrist_roll' motor only and press enter.
コントローラーボードから3ピンケーブルを取り外すことができますが、もう一方の端のグリッパーモーターには接続したままにしておくことができます。すでに正しい位置にあるためです。次に、別の3ピンケーブルを手首ロールモーターに接続し、コントローラーボードに接続してください。前のモーターと同様に、ボードに接続されているモーターがそれだけであることを確認し、モーター自体が他のモーターに接続されていないことを確認してください。
指示に従って各モーターに対してこの操作を繰り返してください。
Enterを押す前に各ステップでケーブル接続を確認してください。例えば、ボードを操作している間に電源ケーブルが外れる可能性があります。
完了すると、スクリプトは単純に終了し、この時点でモーターは使用準備が整います。これで各モーターから次のモーターへの3ピンケーブルを接続し、最初のモーター(id=1の「ショルダーパン」)からコントローラーボードへのケーブルを接続できます。コントローラーボードはアームのベースに取り付けることができます。
リーダーアームについても同じ手順を実行してください。
lerobot-setup-motors \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 # <- paste here the port found at previous step
組み立て
- SO-ARM101のデュアルアーム組み立てプロセスはSO-ARM100と同じです。唯一の違いは、SO-ARM101にケーブルクリップが追加されていることと、リーダーアームのジョイントサーボのギア比が異なることです。そのため、SO100とSO101の両方とも以下の内容を参照して設置できます
- 組み立て前に、モーターモデルと減速比を再度確認してください。SO100を購入した場合は、このステップを無視できます。SO101を購入した場合は、以下の表を確認してF1からF6およびL1からL6を区別してください。
| サーボモデル | ギア比 | 対応ジョイント |
|---|---|---|
| ST-3215-C044(7.4V) | 1:191 | L1 |
| ST-3215-C001(7.4V) | 1:345 | L2 |
| ST-3215-C044(7.4V) | 1:191 | L3 |
| ST-3215-C046(7.4V) | 1:147 | L4–L6 |
| ST-3215-C001(7.4V) / C018(12V) / C047(12V) | 1:345 | F1–F6 |
SO101 Arm Kit Standard Editionを購入した場合、すべての電源は5Vです。SO101 Arm Kit Pro Editionを購入した場合、リーダーアームは5V電源を使用して各ステップでキャリブレーションと操作を行い、フォロワーアームは12V電源を使用して各ステップでキャリブレーションと操作を行う必要があります。
リーダーアームの組み立て
| ステップ 1 | ステップ 2 | ステップ 3 | ステップ 4 | ステップ 5 | ステップ 6 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
| ステップ 7 | ステップ 8 | ステップ 9 | ステップ 10 | ステップ 11 | ステップ 12 |
 |  |  |  |  |  |
| ステップ 13 | ステップ 14 | ステップ 15 | ステップ 16 | ステップ 17 | ステップ 18 |
 |  |  |  |  |  |
| ステップ 19 | ステップ 20 | ||||
 |  |
フォロワーアームの組み立て
- フォロワーアームの組み立て手順は、一般的にリーダーアームと同じです。唯一の違いは、ステップ12以降のエンドエフェクター(グリッパーとハンドル)の取り付け方法です。
| ステップ 1 | ステップ 2 | ステップ 3 | ステップ 4 | ステップ 5 | ステップ 6 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
| ステップ 7 | ステップ 8 | ステップ 9 | ステップ 10 | ステップ 11 | ステップ 12 |
 |  |  |  |  |  |
| ステップ 13 | ステップ 14 | ステップ 15 | ステップ 16 | ステップ 17 | |
 |  |  |  |  |
キャリブレーション
SO100とSO101のコードは互換性があります。SO100のユーザーは、SO101のパラメータとコードを直接利用して操作できます。
SO101 Arm Kit Standard Editionを購入した場合、すべての電源は5Vです。SO101 Arm Kit Pro Editionを購入した場合、リーダーアームは5V電源を使用して各ステップでキャリブレーションと操作を行い、フォロワーアームは12V電源を使用して各ステップでキャリブレーションと操作を行う必要があります。
次に、SO-10xロボットに電源とデータケーブルを接続してキャリブレーションを行い、リーダーアームとフォロワーアームが同じ物理的位置にあるときに同じ位置値を持つようにする必要があります。このキャリブレーションは、1つのSO-10xロボットで訓練されたニューラルネットワークが別のロボットで動作できるようにするために不可欠です。ロボットアームを再キャリブレーションする必要がある場合は、~/.cache/huggingface/lerobot/calibration/robotsまたは~/.cache/huggingface/lerobot/calibration/teleoperatorsの下のファイルを削除してロボットアームを再キャリブレーションしてください。そうしないと、エラープロンプトが表示されます。ロボットアームのキャリブレーション情報は、このディレクトリの下のJSONファイルに保存されます。
フォロワーアームの手動キャリブレーション
6つのロボットサーボのインターフェースを3ピンケーブルで接続し、シャーシサーボをサーボドライブプレートに接続してから、以下のコマンドまたはAPIの例を実行してロボットアームをキャリブレーションしてください:
最初にインターフェース権限を付与
sudo chmod 666 /dev/ttyACM*
次にフォロワーアームをキャリブレーション
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \# <- The port of your robot
--robot.id=my_awesome_follower_arm # <- Give the robot a unique name
以下の動画はキャリブレーションの実行方法を示しています。まず、すべての関節が可動範囲の中央にある位置にロボットを移動させる必要があります。その後、Enterキーを押してから、各関節を可動範囲全体で動かす必要があります。
リーダーアームの手動キャリブレーション
リーダーアームをキャリブレーションするために同じ手順を実行し、以下のコマンドまたはAPIの例を実行してください:
lerobot-calibrate \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \# <- The port of your robot
--teleop.id=my_awesome_leader_arm # <- Give the robot a unique name
テレオペレーション
シンプルなテレオペレーション これでロボットをテレオペレーションする準備が整いました!この簡単なスクリプトを実行してください(カメラには接続せず、表示もしません):
ロボットに関連付けられたIDは、キャリブレーションファイルを保存するために使用されることに注意してください。同じセットアップを使用してテレオペレーション、記録、評価を行う際は、同じIDを使用することが重要です。
sudo chmod 666 /dev/ttyACM*
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
テレオペレーションコマンドは自動的に以下を実行します:
- 不足しているキャリブレーションを特定し、キャリブレーション手順を開始します。
- ロボットとテレオペレーションデバイスを接続し、テレオペレーションを開始します。
カメラの追加
Orbbec Gemini2 深度カメラを使用する場合

- 🚀 ステップ1:Orbbec SDK依存環境のインストール
-
pyorbbecリポジトリをクローンしますcd ~/
git clone https://github.com/orbbec/pyorbbecsdk.git -
対応する**.whlファイル**をダウンロードしてSDKをインストールします
pyorbbecsdk Releasesにアクセスし、
Pythonバージョンに基づいて選択してインストールしてください。例:pip install pyorbbecsdk-x.x.x-cp310-cp310-linux_x86_64.whl -
pyorbbecディレクトリで依存関係をインストールしますcd ~/pyorbbecsdk
pip install -r requirements.txtnumpyバージョンを1.26.0に強制ダウングレードしますpip install numpy==1.26.0
赤いエラーメッセージは無視できます。
- Orbbec SDKを
~/lerobot/src/camerasディレクトリにクローンします
cd ~/lerobot/src/cameras
git clone https://github.com/ZhuYaoHui1998/orbbec.git
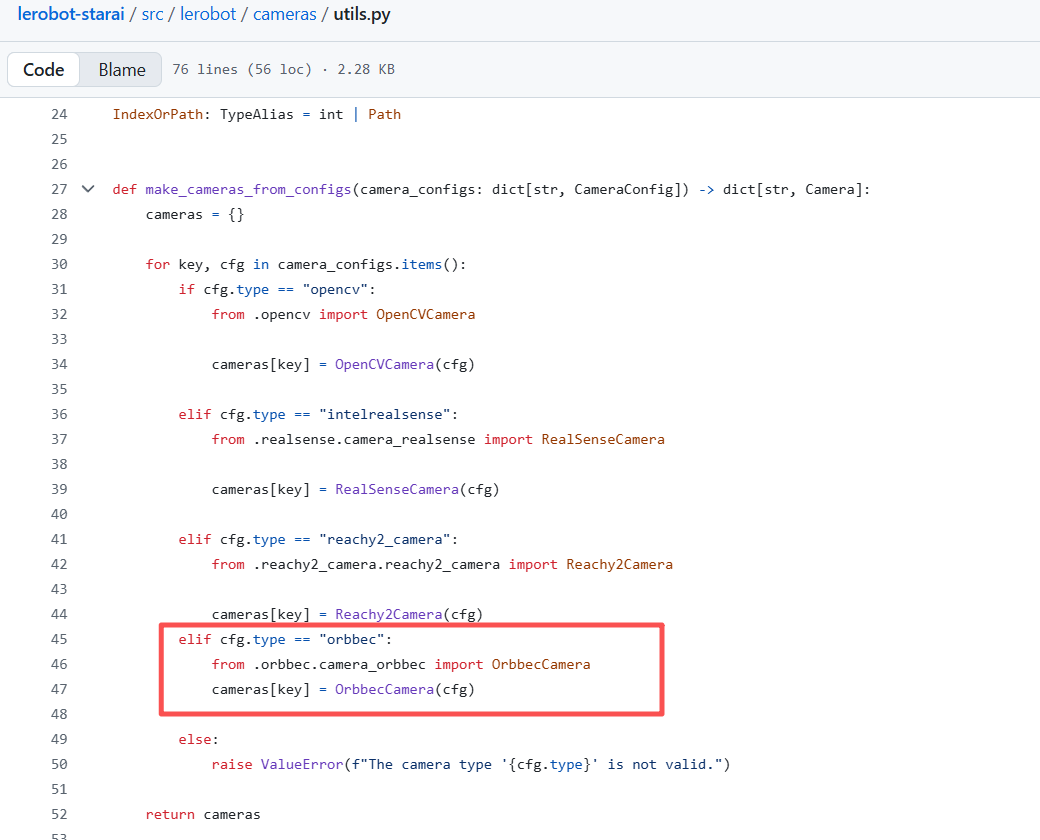
- utils.pyとinit.pyを修正します
~/lerobot/src/lerobot/camerasディレクトリでutils.pyを見つけ、40行目に以下のコードを追加してください:
elif cfg.type == "orbbec":
from .orbbec.camera_orbbec import OrbbecCamera
cameras[key] = OrbbecCamera(cfg)
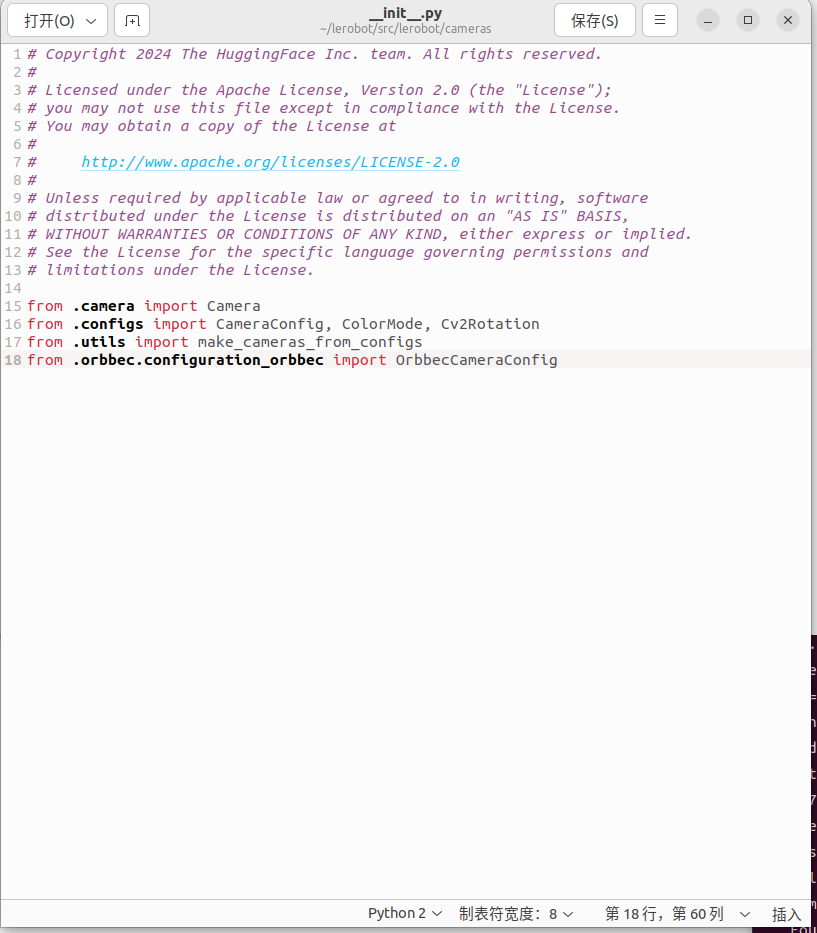
~/lerobot/src/lerobot/camerasディレクトリで__init__.pyを見つけ、18行目に以下のコードを追加してください:
from .orbbec.configuration_orbbec import OrbbecCameraConfig
- 🚀 ステップ2:関数呼び出しと例
以下のすべての例では、so101_followerを使用している実際のロボットアームのモデル(例:so100 / so101)に置き換えてください。
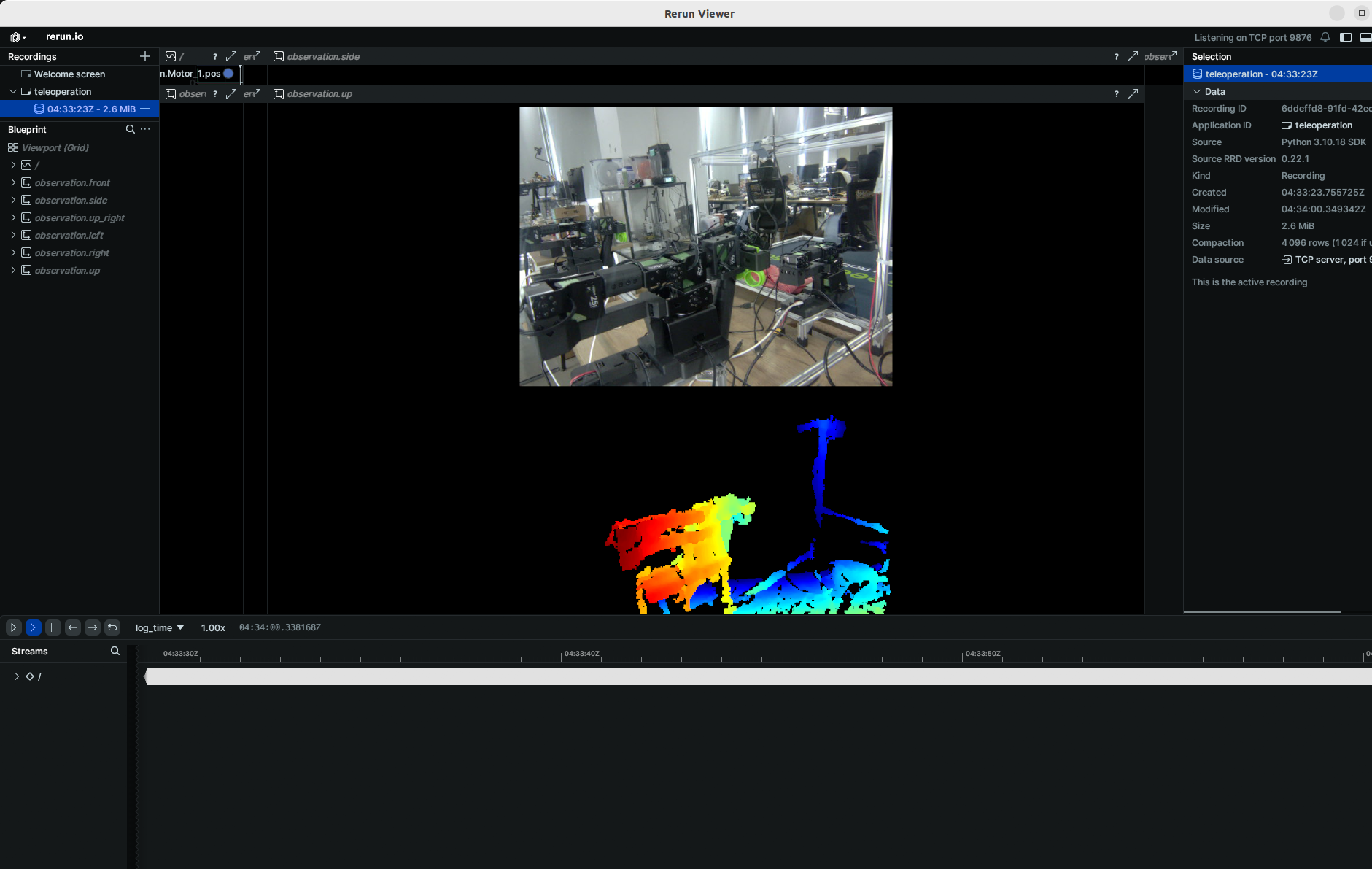
focus_areaハイパーパラメータを追加しました。遠すぎる深度データはロボットアームにとって意味がない(到達や把握ができない物体)ため、focus_area未満または超過の深度データは黒で表示されます。デフォルトのfocus_areaは(20, 600)です。
現在サポートされている解像度は幅:640、高さ:880のみです。
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
データ収集、トレーニング、評価などの後続タスクについては、通常のRGBコマンドと同じプロセスです。通常のRGBコマンドの関連部分を以下に置き換えるだけです:
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
その後、追加の単眼RGBカメラを追加することもできます。
SO100とSO101のコードは互換性があります。SO100のユーザーは、SO101のパラメータとコードを直接利用して操作できます。
カメラをインスタンス化するには、カメラ識別子が必要です。この識別子は、コンピュータを再起動したり、カメラを再接続したりすると変更される可能性があり、この動作は主にオペレーティングシステムに依存します。
システムに接続されているカメラのカメラインデックスを見つけるには、以下のスクリプトを実行してください:
lerobot-find-cameras opencv # or realsense for Intel Realsense cameras
ターミナルに以下の情報が出力されます。
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ 0
Type: OpenCV
Id: 0
Backend api: AVFOUNDATION
Default stream profile:
Format: 16.0
Width: 1920
Height: 1080
Fps: 15.0
--------------------
(more cameras ...)
各カメラで撮影された写真はoutputs/captured_imagesディレクトリで確認できます。
macOSでIntel RealSenseカメラを使用する際、このエラーが発生する可能性があります:Error finding RealSense cameras: failed to set power state。これはsudo権限で同じコマンドを実行することで解決できます。macOSでRealSenseカメラを使用することは不安定であることに注意してください。
その後、テレオペレーション中にコンピュータでカメラを表示できるようになります。以下のコードを実行してください。これは最初のデータセットを記録する前にセットアップを準備するのに役立ちます。
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
より多くのカメラがある場合は、--robot.camerasを変更してカメラを追加できます。index_or_pathの形式に注意してください。これはpython -m lerobot.find_cameras opencvで出力されるカメラIDの最後の桁によって決まります。
fourcc: "MJPG"形式の画像は圧縮されています。より高い解像度を試すことができ、YUYV形式も試すことができます。ただし、後者は画像解像度とFPSを低下させ、ロボットアームの動作にラグを生じさせます。現在、MJPG形式では、1920*1080の解像度で3台のカメラをサポートしながら30FPSを維持できます。とはいえ、同じUSB HUBを介して2台のカメラをコンピュータに接続することは推奨されません。
例えば、サイドカメラを追加したい場合:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
fourcc: "MJPG"形式の画像は圧縮されています。より高い解像度を試すことができ、YUYV形式も試すことができます。ただし、後者は画像解像度とFPSを低下させ、ロボットアームの動作にラグを生じさせます。現在、MJPG形式では、1920*1080の解像度で3台のカメラをサポートしながら30FPSを維持できます。とはいえ、同じUSB HUBを介して2台のカメラをコンピュータに接続することは推奨されません。
このようなバグが見つかった場合。
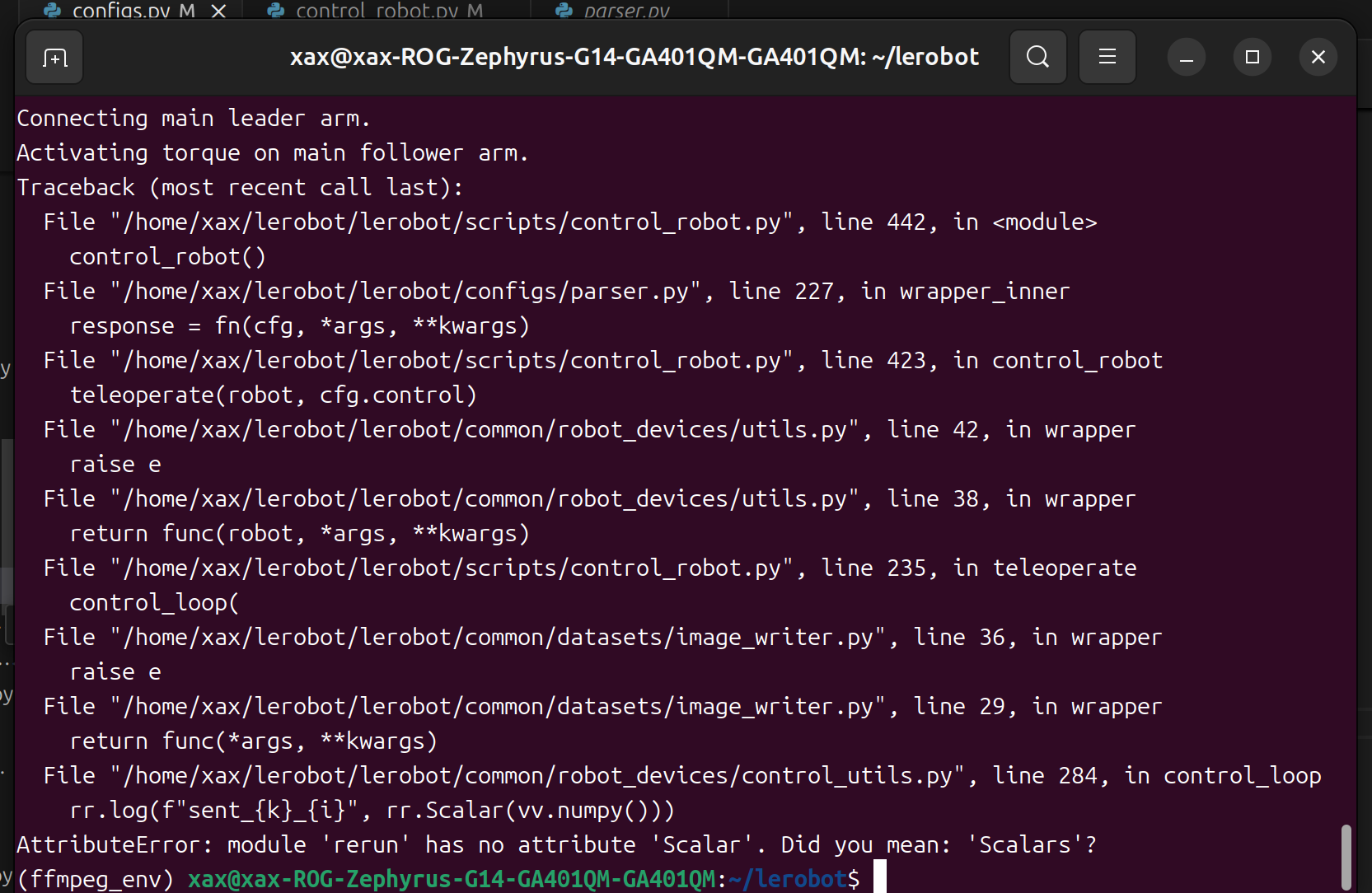
rerunバージョンをダウングレードして問題を解決できます。
pip3 install rerun-sdk==0.23
データセットの記録
- データセットをローカルに保存したい場合は、直接実行できます:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true \
--dataset.repo_id=seeedstudio123/test \
--dataset.num_episodes=5 \
--dataset.single_task="Grab the black cube" \
--dataset.push_to_hub=false \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30
この中で、repo_id は慣例的に変更でき、push_to_hub=false です。最終的に、データセットはホームフォルダの ~/.cache/huggingface/lerobot ディレクトリに保存され、前述の seeedstudio123/test フォルダが作成されます。
- データセットをアップロードするために Hugging Face hub 機能を使用したい場合で、以前に行ったことがない場合は、Hugging Face 設定から生成できる書き込みアクセストークンを使用してログインしていることを確認してください:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
これらのコマンドを実行するために、Hugging Face リポジトリ名を変数に保存します:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
5つのエピソードを記録し、データセットをハブにアップロードします:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true \
--dataset.repo_id=${HF_USER}/record-test \
--dataset.num_episodes=5 \
--dataset.single_task="Grab the black cube" \
--dataset.push_to_hub=true \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30
次のような多くの行が表示されます:
INFO 2024-08-10 15:02:58 ol_robot.py:219 dt:33.34 (30.0hz) dtRlead: 5.06 (197.5hz) dtWfoll: 0.25 (3963.7hz) dtRfoll: 6.22 (160.7hz) dtRlaptop: 32.57 (30.7hz) dtRphone: 33.84 (29.5hz)
記録機能
record 機能は、ロボット動作中のデータキャプチャと管理のためのツール群を提供します。
1. データストレージ
- データは
LeRobotDataset形式を使用して保存され、記録中にディスクに保存されます。 - デフォルトでは、記録後にデータセットが Hugging Face ページにプッシュされます。
- アップロードを無効にするには、
--dataset.push_to_hub=Falseを使用します
2. チェックポイントと再開
- 記録中にチェックポイントが自動的に作成されます。
- 中断後に再開するには、同じコマンドを
--resume=trueで再実行します
⚠️ 重要な注意:再開時は、--dataset.num_episodes を記録する追加エピソード数に設定してください(データセット内の目標総エピソード数ではありません)。
- 最初から記録を開始するには、データセットディレクトリを手動で削除してください。
3. 記録パラメータ
コマンドライン引数を使用してデータ記録のフローを設定します:
| パラメータ | 説明 | デフォルト |
|---|---|---|
| --dataset.episode_time_s | データエピソードあたりの持続時間(秒) | 60 |
| --dataset.reset_time_s | 各エピソード後の環境リセット時間(秒) | 60 |
| --dataset.num_episodes | 記録する総エピソード数 | 50 |
4. 記録中のキーボード操作
キーボードショートカットを使用してデータ記録フローを制御します:
| キー | アクション |
|---|---|
| → (右矢印) | 現在のエピソード/リセットを早期停止し、次に移動。 |
| ← (左矢印) | 現在のエピソードをキャンセルし、再記録。 |
| ESC | セッションを即座に停止し、動画をエンコードし、データセットをアップロード。 |
キーボードが動作しない場合は、pynput の別のバージョンをインストールする必要があるかもしれません。
pip install pynput==1.6.8
データ収集のヒント
- タスクの提案:異なる場所でオブジェクトを掴み、ビンに配置する。
- スケール:≥50エピソードを記録(場所あたり10エピソード)。
- 一貫性:
- カメラを固定に保つ。
- 同一の掴み動作を維持する。
- 操作されるオブジェクトがカメラフィードで見えることを確認する。
- 進行:
- バリエーション(新しい場所、技術、カメラ調整)を追加する前に、信頼性のある掴みから始める。
- 失敗を防ぐために急激な複雑さの増加を避ける。
💡 経験則:カメラ画像だけを見てタスクを自分で実行できるようにする必要があります。
この重要なトピックについてより深く掘り下げたい場合は、良いデータセットとは何かについて書いたブログ投稿をチェックできます。
トラブルシューティング
Linux固有の問題: 記録中に右矢印/左矢印/ESCキーが応答しない場合:
$DISPLAY環境変数が設定されていることを確認してください(pynput の制限を参照)。
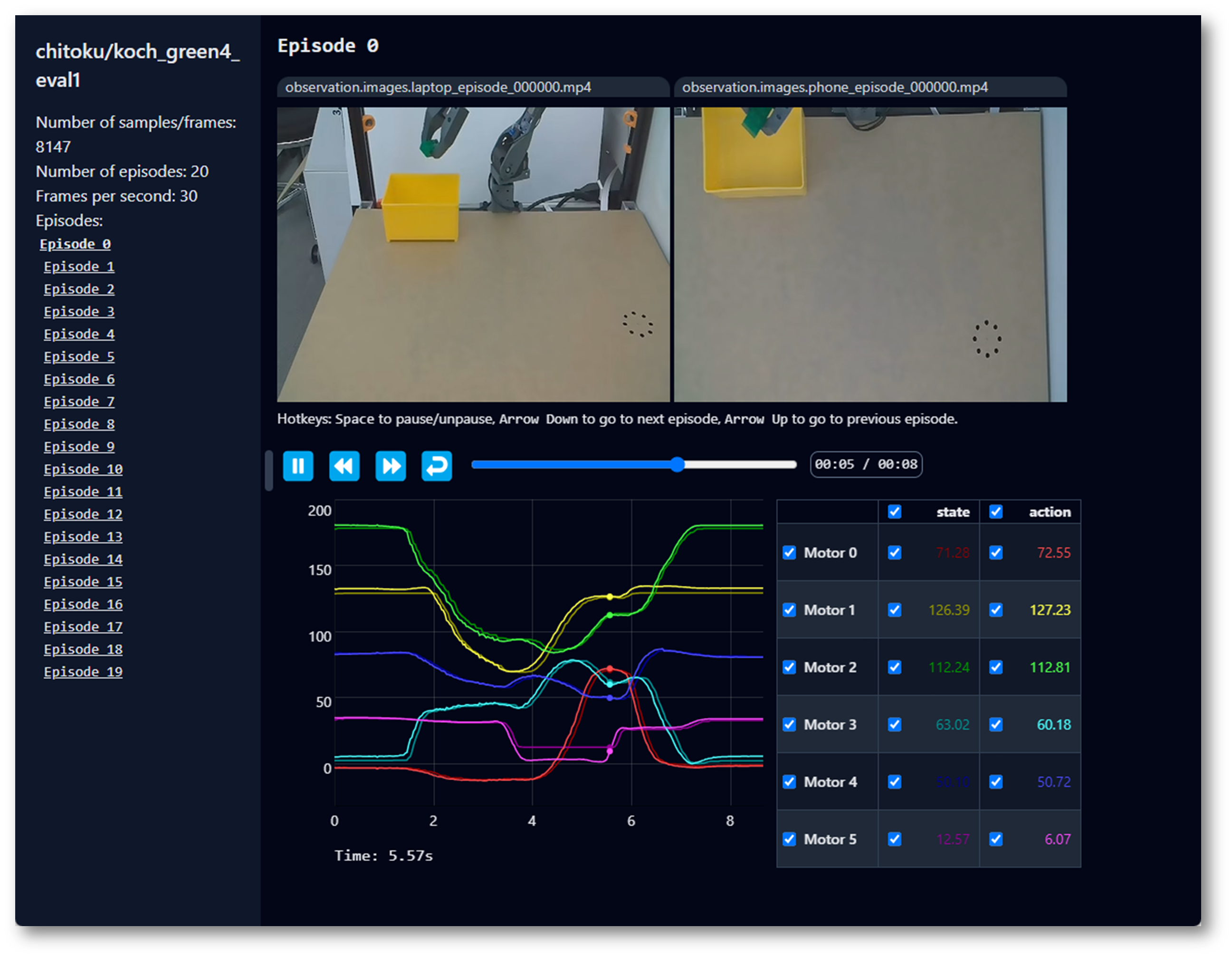
データセットの可視化
SO100 と SO101 のコードは互換性があります。SO100 のユーザーは SO101 のパラメータとコードを直接利用して操作できます。
--control.push_to_hub=true でデータセットをハブにアップロードした場合、以下で与えられるリポジトリIDをコピー&ペーストしてデータセットをオンラインで可視化できます:
echo ${HF_USER}/so101_test
--dataset.push_to_hub=false でアップロードしなかった場合も、以下でローカルで可視化できます:
lerobot-dataset-viz \
--repo-id ${HF_USER}/so101_test \
--dataset.push_to_hub=false でアップロードした場合も、以下でローカルで可視化できます:
lerobot-dataset-viz \
--repo-id seeed_123/so101_test \
ここで、seeed_123 はデータ収集時に定義されたカスタム repo_id 名です。
エピソードの再生
SO100 と SO101 のコードは互換性があります。SO100 のユーザーは SO101 のパラメータとコードを直接利用して操作できます。
便利な機能として replay 機能があり、記録したエピソードや外部のデータセットからのエピソードを再生できます。この機能は、ロボットの動作の再現性をテストし、同じモデルのロボット間での転移可能性を評価するのに役立ちます。
以下のコマンドまたは API の例を使用して、ロボットで最初のエピソードを再生できます:
lerobot-replay \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--dataset.repo_id=${HF_USER}/record-test \
--dataset.episode=0
ロボットは記録した動きと似た動きを再現するはずです。
訓練と評価
ACT
ACTを参照
ロボットを制御するポリシーを訓練するには、lerobot-train スクリプトを使用します。
訓練
lerobot-train \
--dataset.repo_id=${HF_USER}/so101_test \
--policy.type=act \
--output_dir=outputs/train/act_so101_test \
--job_name=act_so101_test \
--policy.device=cuda \
--wandb.enable=false \
--steps=300000
ローカルデータセットで訓練したい場合は、repo_id がデータ収集時に使用したものと一致することを確認し、--policy.push_to_hub=False を追加してください。
lerobot-train \
--dataset.repo_id=seeedstudio123/test \
--policy.type=act \
--output_dir=outputs/train/act_so101_test \
--job_name=act_so101_test \
--policy.device=cuda \
--wandb.enable=false \
--policy.push_to_hub=false\
--steps=300000
説明しましょう:
- データセット指定:パラメータ
--dataset.repo_id=${HF_USER}/so101_testを通じてデータセットを提供します。 - 訓練ステップ:
--steps=300000を使用して訓練ステップ数を変更します。アルゴリズムはデフォルトで800000ステップですが、タスクの難易度と訓練中の損失を観察することで調整できます。 - ポリシータイプ:
policy.type=actでポリシーを提供します。同様に、[act,diffusion,pi0,pi0fast,pi0fast,sac,smolvla] などのポリシー間で切り替えることができ、これによりconfiguration_act.pyから設定が読み込まれます。重要なことに、このポリシーは、この情報がすでにデータセットに保存されているため、ロボットの(例:laptopとphone)モーター状態、モーターアクション、カメラ数に自動的に適応します。 - デバイス選択:Nvidia GPU で訓練しているため
policy.device=cudaを提供しますが、Apple Silicon で訓練する場合はpolicy.device=mpsを使用できます。 - 可視化ツール:Weights and Biases を使用して訓練チャートを可視化するために
wandb.enable=trueを提供します。これはオプションですが、使用する場合はwandb loginを実行してログインしていることを確認してください。
評価
SO100 と SO101 のコードは互換性があります。SO100 のユーザーは SO101 のパラメータとコードを直接利用して操作できます。
lerobot/record.py の record 機能を使用できますが、ポリシーチェックポイントを入力として使用します。例えば、10の評価エピソードを記録するには、このコマンドを実行します:
lerobot-record \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video10, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: intelrealsense, serial_number_or_name: 233522074606, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=${HF_USER}/eval_so100 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=${HF_USER}/my_policy
例えば:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_so101_test/checkpoints/last/pretrained_model
-
--policy.pathパラメータは、ポリシー訓練結果の重みファイルのパスを示します(例:outputs/train/act_so101_test/checkpoints/last/pretrained_model)。モデル訓練結果の重みファイルをHubにアップロードした場合、モデルリポジトリも使用できます(例:${HF_USER}/act_so100_test)。 -
データセット名
dataset.repo_idはeval_で始まります。この操作により、評価中にビデオとデータが個別に記録され、eval_で始まるフォルダに保存されます(例:seeed/eval_test123)。 -
評価フェーズで
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/seeed/eval_xxxx'エラーが発生した場合、まずeval_で始まるフォルダを削除してから、プログラムを再実行してください。 -
mean is infinity. You should either initialize with stats as an argument or use a pretrained modelエラーが発生した場合、--robot.camerasパラメータ内のfrontやsideなどのキーワードが、データセット収集時に使用したものと厳密に一致している必要があることに注意してください。
SmolVLA
SmolVLA は、Hugging Face のロボティクス向け軽量基盤モデルです。LeRobot データセットでの簡単なファインチューニングを目的として設計されており、開発を加速させます!
環境のセットアップ
以下を実行してSmolVLAの依存関係をインストールします:
pip install -e ".[smolvla]"
データでSmolVLAをファインチューニング
事前訓練済み450Mモデルのsmolvla_baseを使用して、データでファインチューニングします。20kステップでモデルを訓練すると、単一のA100 GPUで約4時間かかります。パフォーマンスとユースケースに基づいてステップ数を調整してください。
GPUデバイスがない場合は、Google Colabのノートブックを使用して訓練できます。
--dataset.repo_id を使用してデータセットを訓練スクリプトに渡します。インストールをテストしたい場合は、SmolVLA Paper用に収集したデータセットの1つを使用する以下のコマンドを実行してください。
lerobot-train \
--policy.path=lerobot/smolvla_base \
--dataset.repo_id=${HF_USER}/mydataset \
--batch_size=64 \
--steps=20000 \
--output_dir=outputs/train/my_smolvla \
--job_name=my_smolvla_training \
--policy.device=cuda \
--wandb.enable=true
GPUが許可する限り、読み込み時間が短いままである限り、小さなバッチサイズから始めて段階的に増やすことができます。
ファインチューニングは芸術です。ファインチューニングのオプションの完全な概要については、以下を実行してください:
lerobot-train --help
ファインチューニングされたモデルの評価とリアルタイム実行
エピソードを記録する場合と同様に、HuggingFace Hubにログインすることをお勧めします。対応する手順に従ってください:データセットの記録。ログイン後、以下を実行してセットアップで推論を実行できます:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \ # <- Use your port
--robot.id=my_blue_follower_arm \ # <- Use your robot id
--robot.cameras="{ front: {type: opencv, index_or_path: 8, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \ # <- Use your cameras
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--dataset.repo_id=${HF_USER}/eval_DATASET_NAME_test \ # <- This will be the dataset name on HF Hub
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=so100_leader \
# --teleop.port=/dev/ttyACM0 \
# --teleop.id=my_red_leader_arm \
--policy.path=HF_USER/FINETUNE_MODEL_NAME # <- Use your fine-tuned model
評価セットアップに応じて、評価スイート用に記録する期間とエピソード数を設定できます。
LIBERO
LIBERO は、生涯ロボット学習を研究するために設計されたベンチマークです。ロボットは工場で一度だけ事前訓練されるのではなく、時間をかけて人間のユーザーと共に学習し適応し続ける必要があるという考えです。この継続的な適応は意思決定における生涯学習(LLDM)と呼ばれ、真にパーソナライズされたヘルパーとなるロボットの構築に向けた重要なステップです。
LIBEROでの評価
LeRobotでは、LIBEROをフレームワークに移植し、主に軽量Vision-Language-ActionモデルであるSmolVLAの評価に使用しました。
LIBEROは現在、マルチ評価対応シミュレーションの一部となっており、フラグ1つで単一のタスクスイートまたは複数のスイートを同時にベンチマークできます。
LIBEROをインストールするには、LeRobot公式手順に従った後、pip install -e ".[libero]" を実行してください。
単一スイート評価
1つのLIBEROスイートでポリシーを評価:
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object \
--eval.batch_size=2 \
--eval.n_episodes=3
--env.taskはスイート(libero_object、libero_spatialなど)を選択します。--eval.batch_sizeは並列実行する環境数を制御します。--eval.n_episodesは実行する総エピソード数を設定します。
マルチスイート評価
複数のスイートで同時にポリシーをベンチマーク:
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object,libero_spatial \
--eval.batch_size=1 \
--eval.n_episodes=2
- マルチスイート評価には、
--env.taskにカンマ区切りのリストを渡します。
訓練コマンドの例
lerobot-train \
--policy.type=smolvla \
--policy.repo_id=${HF_USER}/libero-test \
--dataset.repo_id=HuggingFaceVLA/libero \
--env.type=libero \
--env.task=libero_10 \
--output_dir=./outputs/ \
--steps=100000 \
--batch_size=4 \
--eval.batch_size=1 \
--eval.n_episodes=1 \
--eval_freq=1000 \
レンダリングに関する注意
LeRobotはシミュレーションにMuJoCoを使用します。訓練または評価の前にレンダリングバックエンドを設定する必要があります:
export MUJOCO_GL=egl→ ヘッドレスサーバー用(例:HPC、クラウド)
Pi0
Pi0 を参照してください
pip install -e ".[pi]"
訓練
lerobot-train \
--policy.type=pi0 \
--dataset.repo_id=seeed/eval_test123 \
--job_name=pi0_training \
--output_dir=outputs/pi0_training \
--policy.pretrained_path=lerobot/pi0_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--policy.dtype=bfloat16 \
--steps=20000 \
--policy.device=cuda \
--batch_size=32 \
--wandb.enable=false
評価
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30,fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/pi0_training/checkpoints/last/pretrained_model
Pi0.5
Pi0.5 を参照してください
pip install -e ".[pi]"
訓練
lerobot-train \
--dataset.repo_id=seeed/eval_test123 \
--policy.type=pi05 \
--output_dir=outputs/pi05_training \
--job_name=pi05_training \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=false \
--policy.dtype=bfloat16 \
--steps=3000 \
--policy.device=cuda \
--batch_size=32
評価
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30,fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/pi05_training/checkpoints/last/pretrained_model
GR00T N1.5
GR00T N1.5 を参照してください
以下のエラーが発生した場合:
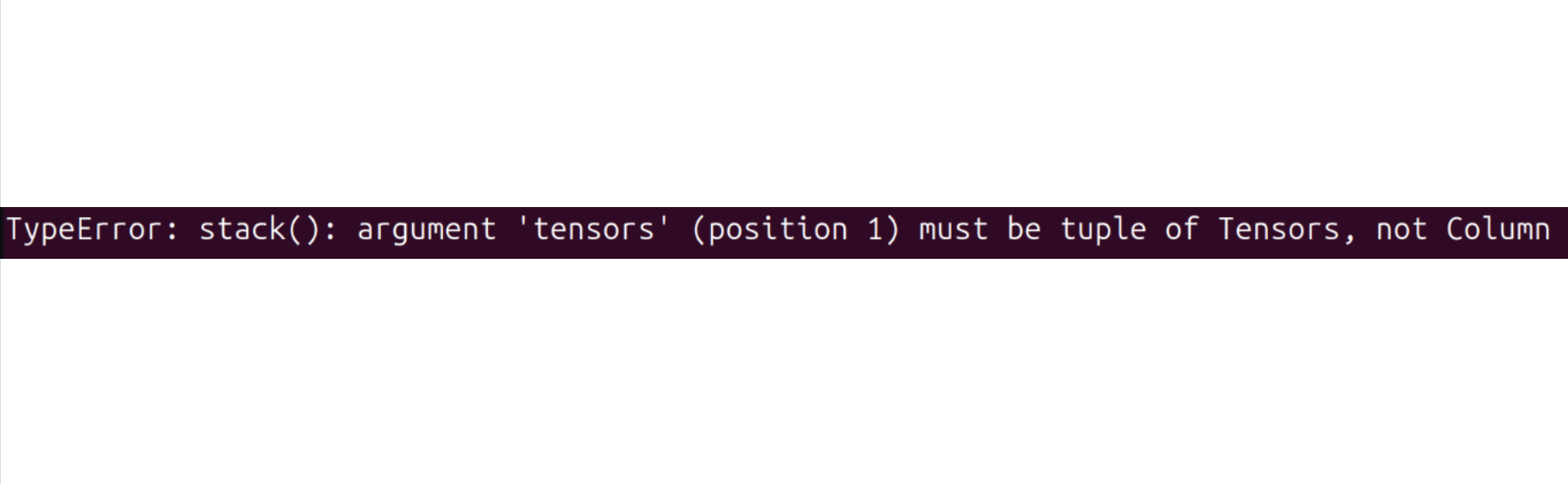
以下のコマンドを実行して解決してみてください:
pip install datasets==2.19
トレーニングには数時間かかります。チェックポイントは outputs/train/act_so100_test/checkpoints に保存されます。
チェックポイントからトレーニングを再開するには、以下は act_so101_test ポリシーの last チェックポイントから再開するコマンドの例です:
lerobot-train \
--config_path=outputs/train/act_so101_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true
ポリシーチェックポイントのアップロード
トレーニングが完了したら、最新のチェックポイントを以下でアップロードします:
huggingface-cli upload ${HF_USER}/act_so101_test \
outputs/train/act_so101_test/checkpoints/last/pretrained_model
中間チェックポイントも以下でアップロードできます:
CKPT=010000
huggingface-cli upload ${HF_USER}/act_so101_test${CKPT} \
outputs/train/act_so101_test/checkpoints/${CKPT}/pretrained_model
FAQ
-
このドキュメント/チュートリアルに従っている場合は、推奨されるGitHubリポジトリ
https://github.com/Seeed-Projects/lerobot.gitをgit cloneしてください。このドキュメントで推奨されるリポジトリは検証済みの安定版です。公式Lerobotリポジトリは最新版に継続的に更新されており、異なるデータセットバージョン、異なるコマンドなどの予期しない問題を引き起こす可能性があります。 -
サーボIDのキャリブレーション時に以下のエラーが発生した場合:
`Motor ‘gripper’ was not found, Make sure it is connected`通信ケーブルがサーボに正しく接続されているか、電源が正しい電圧を供給しているかを慎重に確認してください。
-
以下のエラーが発生した場合:
Could not connect on port "/dev/ttyACM0"ls /dev/ttyACM*を実行してACM0が存在することが確認できる場合、シリアルポートの権限を付与し忘れています。ターミナルでsudo chmod 666 /dev/ttyACM*を入力して修正してください。 -
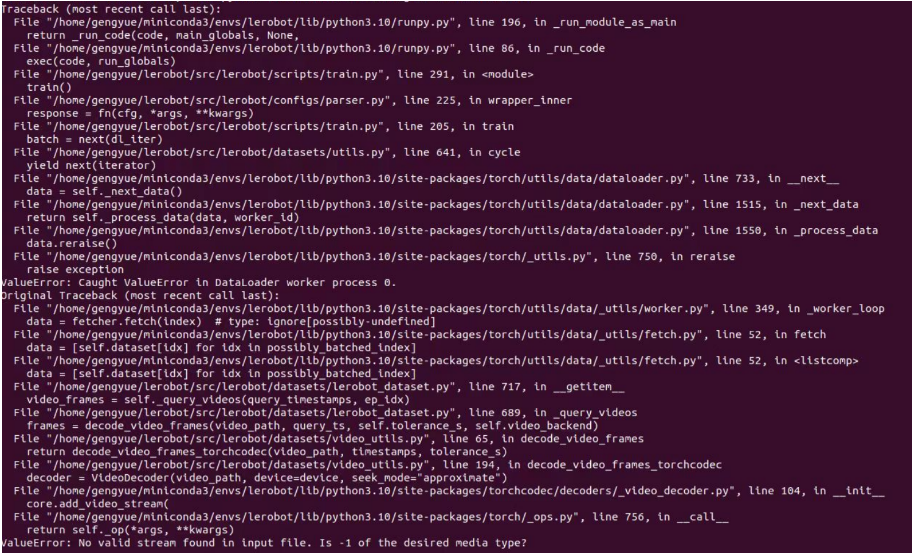
以下のエラーが発生した場合:
No valid stream found in input file. Is -1 of the desired media type?conda install ffmpeg=7.1.1 -c conda-forgeを使用してffmpeg 7.1.1をインストールしてください。
-
以下のエラーが発生した場合:
ConnectionError: Failed to sync read 'Present_Position' on ids=[1,2,3,4,5,6] after 1 tries. [TxRxResult] There is no status packet!対応するポートのロボットアームが電源オンになっているか、バスサーボのデータケーブルが緩んでいるか切断されていないかを確認する必要があります。サーボのライトが点灯していない場合、前のサーボのケーブルが緩んでいることを意味します。
-
ロボットアームのキャリブレーション時に以下のエラーが発生した場合:
Magnitude 30841 exceeds 2047 (max for sign_bit_index=11)ロボットアームの電源を切って再起動し、再度キャリブレーションを試してください。この方法は、キャリブレーション中にMAX角度が数万の値に達した場合にも使用できます。これで解決しない場合は、中央値キャリブレーションとID書き込みを含む対応するサーボの再キャリブレーションが必要です。
-
評価フェーズで以下のエラーが発生した場合:
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/seeed/eval_xxxx'まず
eval_で始まるフォルダを削除してから、プログラムを再実行してください。 -
評価フェーズで以下のエラーが発生した場合:
`mean` is infinity. You should either initialize with `stats` as an argument or use a pretrained model--robot.camerasパラメータの "front" や "side" などのキーワードは、データセット収集時に使用したものと厳密に一致している必要があることに注意してください。 -
ロボットアームの部品を修理または交換した場合は、
~/.cache/huggingface/lerobot/calibration/robotsまたは~/.cache/huggingface/lerobot/calibration/teleoperators下のファイルを完全に削除し、ロボットアームを再キャリブレーションしてください。そうしないと、これらのディレクトリのJSONファイルにキャリブレーション情報が保存されているため、エラーメッセージが表示される可能性があります。 -
50セットのデータでACTをトレーニングするには、RTX 3060(8GB)搭載のラップトップで約6時間、RTX 4090またはA100 GPUを搭載したコンピュータで約2-3時間かかります。
-
データ収集中は、カメラの位置、角度、周囲の照明を安定させてください。カメラに映る不安定な背景や歩行者の量を減らしてください。展開環境の変化が過度になると、ロボットアームが適切に把握できなくなる可能性があります。
-
データ収集コマンドでは、
num-episodesパラメータが十分なデータを収集するように設定されていることを確認してください。途中で手動で一時停止しないでください。データの平均と分散はデータ収集完了後にのみ計算され、これらはトレーニングに必要です。 -
プログラムがUSBカメラから画像データを読み取れないと表示される場合は、USBカメラがハブ経由で接続されていないことを確認してください。USBカメラは高速な画像転送速度を確保するため、デバイスに直接接続する必要があります。
-
AttributeError: module 'rerun' has no attribute 'scalar'. Did you mean: 'scalars'?のようなバグが見つかった場合は、rerunバージョンをダウングレードして問題を解決できます。
pip3 install rerun-sdk==0.23
ソフトウェアの問題や環境依存の問題で解決できない場合は、このチュートリアルの最後のFAQセクションを確認することに加えて、LeRobotプラットフォームまたはLeRobot Discordチャンネルに速やかに問題を報告してください。
引用
TheRobotStudio Project: SO-ARM10x
Huggingface Project: Lerobot
Dnsty: Jetson Containers
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。