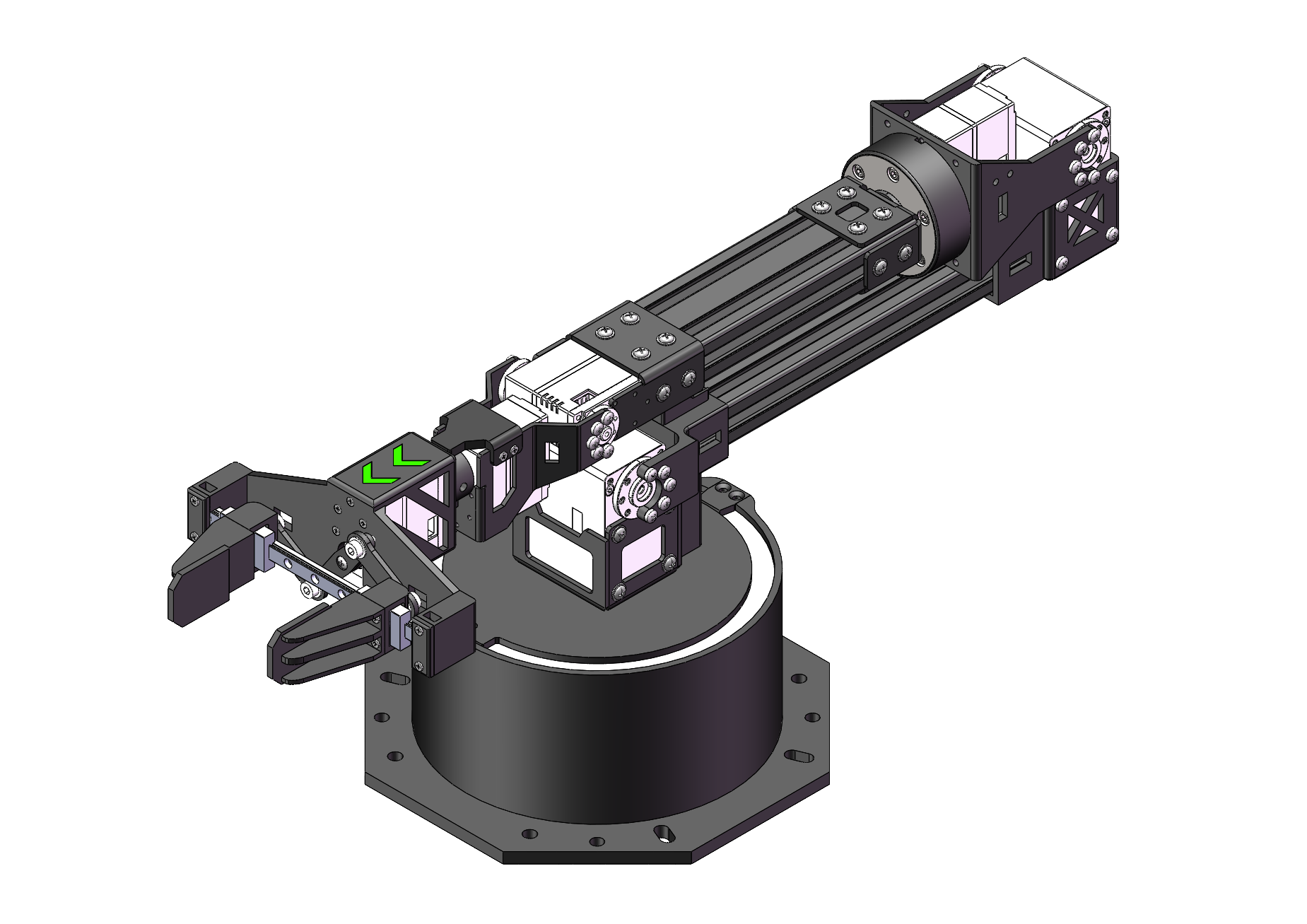
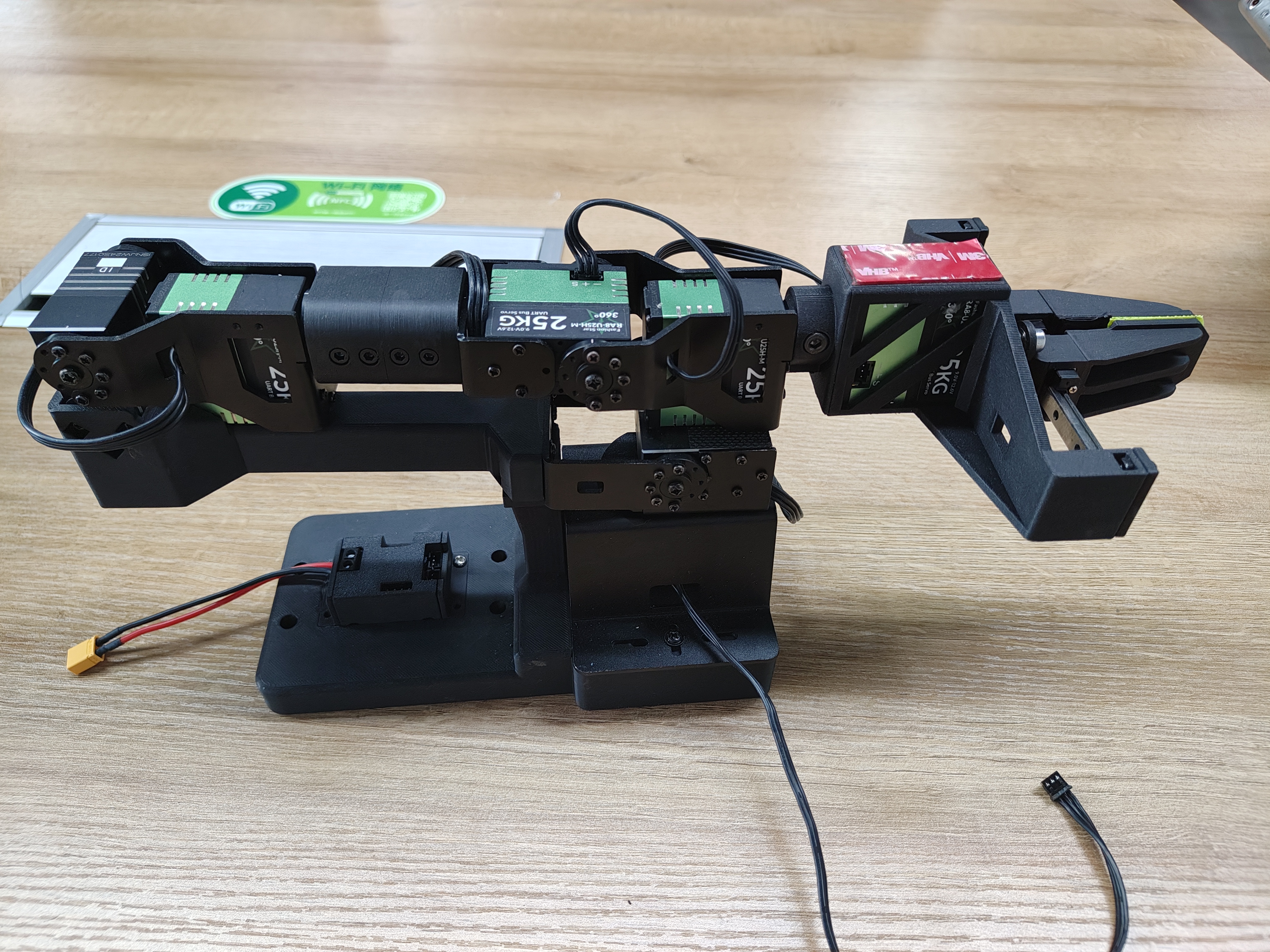
LeRobotでStarAI ロボットアームを始める
| フォロワー Viola | リーダー Violin | フォロワー Cello |
|---|---|---|
 |  |  |
製品紹介
- オープンソース & 開発者フレンドリー Fishion Star Technology Limitedによるオープンソースで開発者フレンドリーな6+1自由度ロボットアームソリューションです。
- LeRobotとの統合 LeRobot Platformとの統合を目的として設計されており、実世界のロボットタスクにおける模倣学習のためのPyTorchモデル、データセット、ツール(データ収集、シミュレーション、トレーニング、デプロイメントを含む)を提供します。
- 包括的な学習リソース 組み立てと校正ガイド、カスタム把持タスクの例など、包括的なオープンソース学習リソースを提供し、ユーザーが迅速に開始してロボットアプリケーションを開発できるよう支援します。
- Nvidiaとの互換性 reComputer Mini J4012 Orin NX 16GBプラットフォームでのデプロイメントをサポートします。
主な特徴
- すぐに使用可能 — 組み立て不要。開封してAIの世界に飛び込むだけ。
- 6+1自由度と470mmのリーチ — 汎用性と精度のために構築。
- デュアルブラシレスバスサーボ駆動 — 最大300gのペイロードでスムーズ、静音、強力。
- 最大66mm開口の平行グリッパー — クイック交換の柔軟性のためのモジュラー指先。
- 独自のホバーロック技術 — ワンプレスでリーダーアームを任意の位置で瞬時に固定。
仕様

| 項目 | フォロワーアーム | Viola | リーダーアーム |Violin | フォロワーアーム |Cello |
|---|---|---|---|
| 自由度 | 6+1 | 6+1 | 6+1 |
| リーチ | 470mm | 470mm | 670mm |
| 再現性 | 2mm | - | 2mm |
| 作業ペイロード | 300g(70%リーチ時) | - | 750g(70%リーチ時) |
| サーボ | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX18-U100H-M x3 RX8-U50H-M x3 RX8-U51H-M x1 |
| 平行グリッパーキット | ✅ | - | ✅ |
| 手首回転 | Yes | Yes | Yes |
| 任意位置での保持 | Yes | Yes(ハンドルボタン付き) | Yes |
| 手首カメラマウント | 参考3Dプリントファイルを提供 | 参考3Dプリントファイルを提供 | |
| LeRobotとの動作 | ✅ | ✅ | ✅ |
| ROS 2との動作 | ✅ | ✅ | ✅ |
| MoveIt2との動作 | ✅ | ✅ | ✅ |
| Gazeboとの動作 | ✅ | ✅ | ✅ |
| 通信ハブ | UC-01 | UC-01 | UC-01 |
| 電源 | 12V10A/120w XT30 | 12V10A/120w XT30 | 12V25A/300w XT60 |
サーボモーターの詳細については、以下のリンクをご覧ください。
初期環境セットアップ
Ubuntu x86の場合:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
Jetson Orinの場合:
- Jetson JetPack 6.0+
- Python 3.10
- Torch 2.6
インストールとデバッグ
LeRobotのインストール
pytorchやtorchvisionなどの環境は、お使いのCUDAに基づいてインストールする必要があります。
- Minicondaのインストール: Jetsonの場合:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
または、X86 Ubuntu 22.04の場合:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- lerobot用の新しいconda環境を作成してアクティベート
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Lerobotのクローン:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- minicondaを使用する場合、環境にffmpegをインストール:
conda install ffmpeg -c conda-forge
これは通常、libsvtav1エンコーダーでコンパイルされたプラットフォーム用のffmpeg 7.Xをインストールします。libsvtav1がサポートされていない場合(ffmpeg -encodersでサポートされているエンコーダーを確認)、以下を実行できます:
- [すべてのプラットフォーム] 以下を使用してffmpeg 7.Xを明示的にインストール:
conda install ffmpeg=7.1.1 -c conda-forge
- [Linuxのみ] ffmpegビルド依存関係をインストールし、libsvtav1でソースからffmpegをコンパイルし、which ffmpegでインストールに対応するffmpegバイナリを使用していることを確認してください。
- LeRobotのインストール:
cd ~/lerobot && pip install -e .
sudo apt remove brltty
Jetson Jetpackデバイスの場合(このステップを実行する前に、ステップ5からPytorch-gpuとTorchvisionをインストールしてください):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
6.Fashionstarモーター依存関係のインストール:
pip install lerobot_teleoperator_bimanual_leader
pip install lerobot_robot_bimanual_follower
- PytorchとTorchvisionの確認
pipを介してlerobot環境をインストールすると、元のPytorchとTorchvisionがアンインストールされ、PytorchとTorchvisionのCPUバージョンがインストールされるため、Pythonで確認を行う必要があります。
import torch
print(torch.cuda.is_available())
印刷された結果がFalseの場合、公式ウェブサイトのチュートリアルに従ってPytorchとTorchvisionを再インストールする必要があります。
Jetsonデバイスを使用している場合は、このチュートリアルに従ってPytorchとTorchvisionをインストールしてください。
ロボットアームの開梱
ロボットアームキットに含まれるもの
- リーダーアーム
- フォロワーアーム
- コントローラー(ハンドル)
- 平行グリッパー
- インストールツール(ネジ、六角レンチ)
- Cクランプ ×2
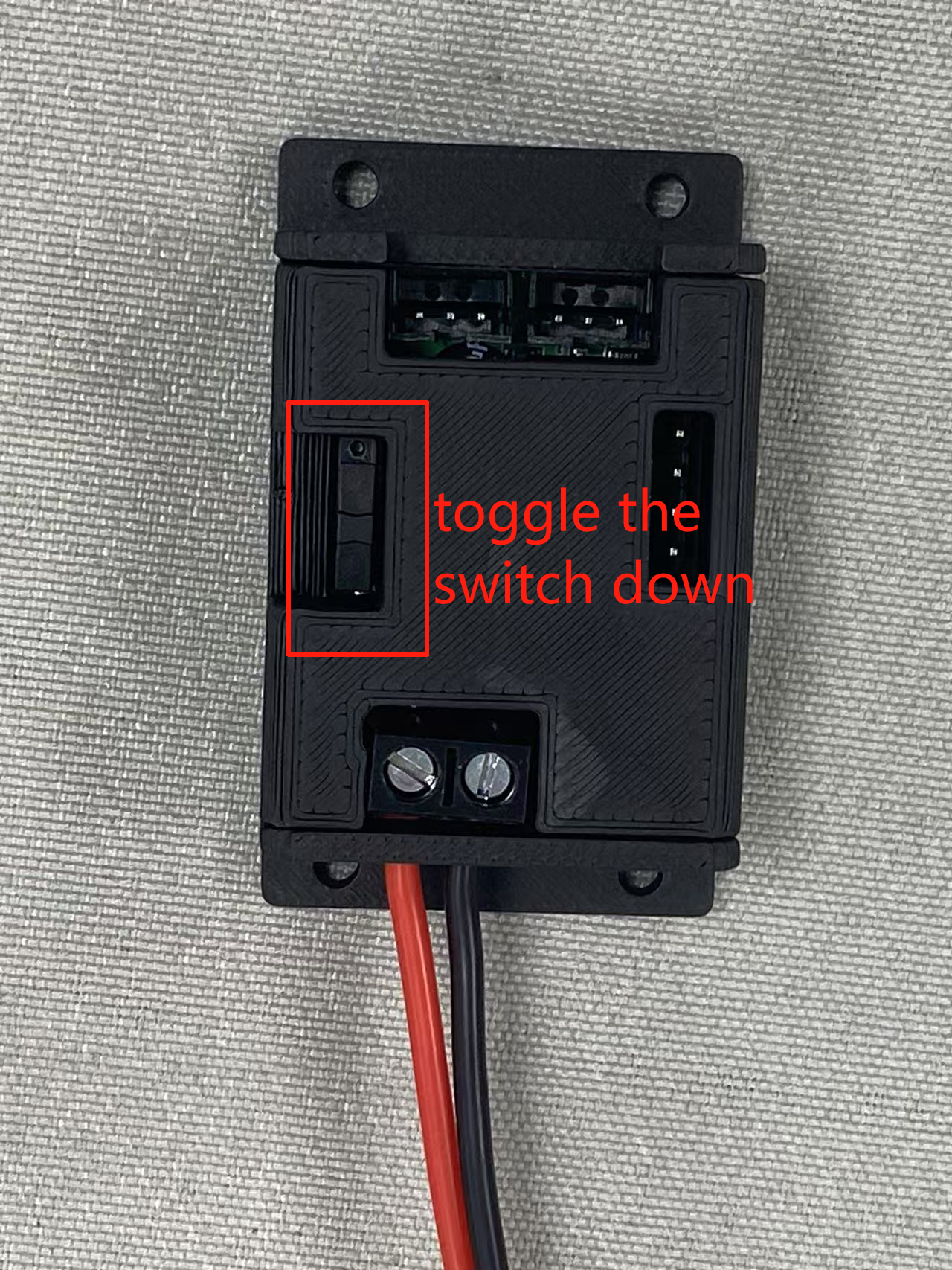
- UC-01デバッグボード ×2
UC-01デバッグボードスイッチ:
アームポートの設定
~/lerobotディレクトリに入る:
cd ~/lerobot
ターミナルで以下のコマンドを実行して、アームに関連付けられたUSBポートを見つけます:
lerobot-find-port
usbを取り外すことを忘れないでください。そうしないとインターフェースが検出されません。
例:
- リーダーアームのポートを識別する際の出力例(例:Macでは
/dev/tty.usbmodem575E0031751、Linuxでは/dev/ttyUSB0の可能性): - フォロワーアームのポートを識別する際の出力例(例:Macでは
/dev/tty.usbmodem575E0032081、Linuxでは/dev/ttyUSB1の可能性):
ttyUSB0シリアルポートが認識されない場合は、以下の解決策を試してください:
すべてのUSBポートをリストアップします。
lsusb

認識されたら、ttyusbの情報を確認します。
sudo dmesg | grep ttyUSB

最後の行は、brlttyがUSBを占有しているため切断されていることを示しています。brlttyを削除すると問題が解決されます。
sudo apt remove brltty

最後に、chmodコマンドを使用します。
sudo chmod 777 /dev/ttyUSB*
以下を実行してUSBポートへのアクセス権を付与する必要がある場合があります:
sudo chmod 666 /dev/ttyUSB*
キャリブレーション
StarAIロボットアームの開封からテレオペレーションまでを扱った動画については、以下を参照してください:
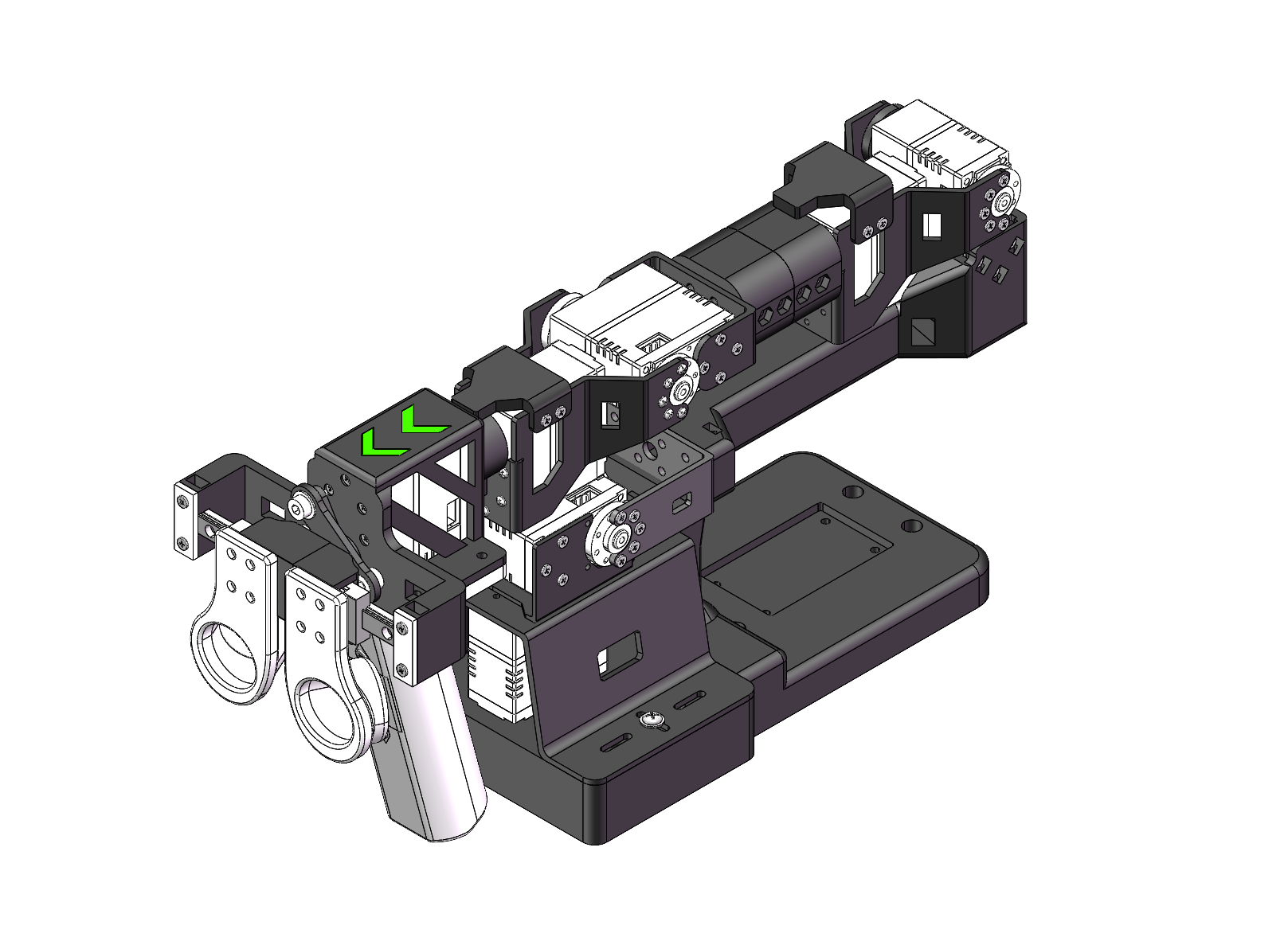
ロボットアームを初期位置(下図のとおり)に移動し、スタンバイモードにしてから、電源を再接続してください。
新バージョンのロボットアームの初期位置については、ジョイント3、4、5のサーボが図の位置と厳密に一致するよう特に注意してください。
| 新しいバイオリンリーダーアーム | 旧バイオリンリーダーアーム | ビオラフォロワーアーム | チェロフォロワーアーム |
|---|---|---|---|
 | 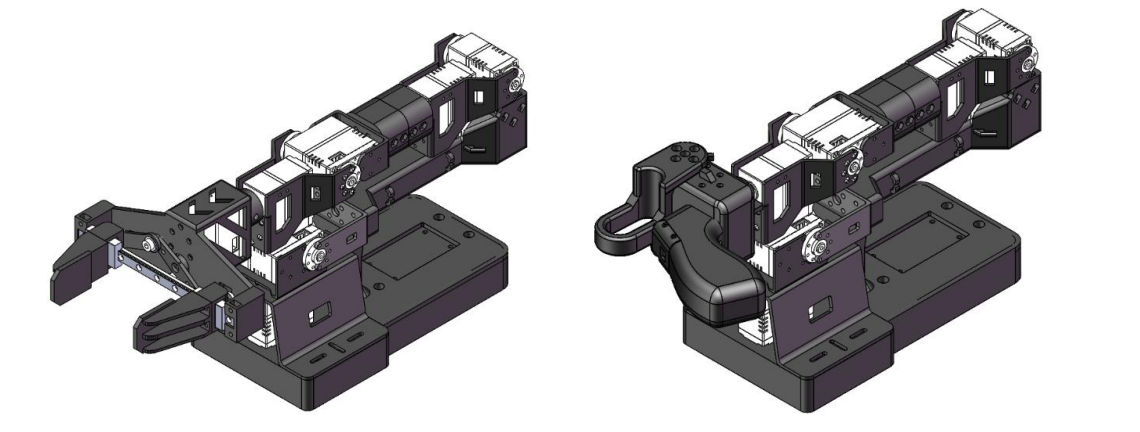 | 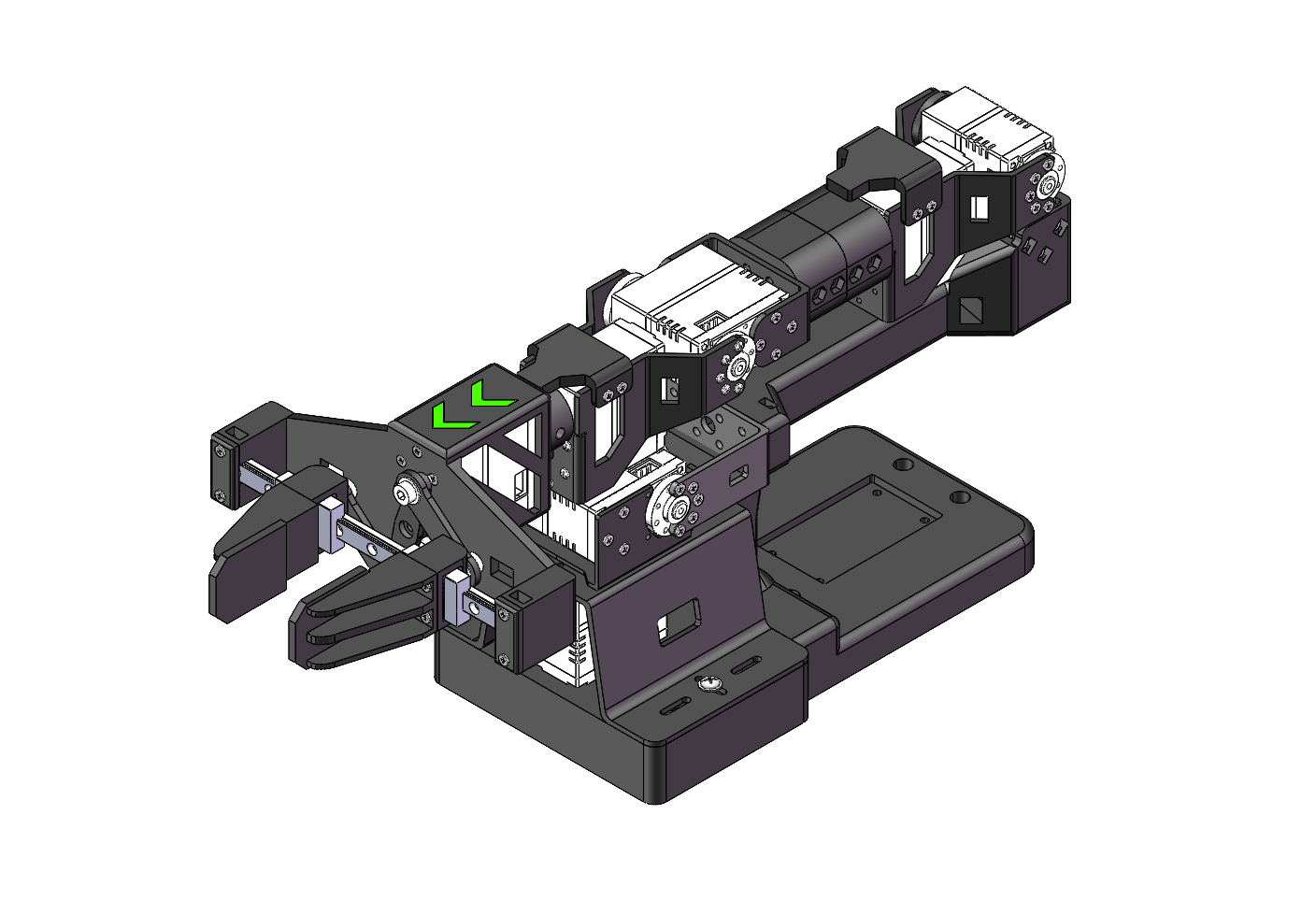 |  |
例えば:
| Violin リーダーアーム | Viola フォロワーアーム |
|---|---|
 |  |
PC(Linux)とJetsonボードを例にすると、最初に挿入されたUSBデバイスはttyUSB0にマッピングされ、2番目に挿入されたUSBデバイスはttyUSB1にマッピングされます。
コードを実行する前に、リーダーとフォロワーのマッピングインターフェースに注意してください。
リーダーロボットアーム
リーダーを/dev/ttyUSB0に接続するか、--teleop.portパラメータを変更してから実行してください:
lerobot-calibrate --teleop.type=lerobot_teleoperator_violin --teleop.port=/dev/ttyUSB0 --teleop.id=my_awesome_staraiviolin_arm
起動後、各ジョイントのエンコーダ値が表示されます。各ジョイントを手動で一つずつキャリブレーションする必要があります:各ジョイントを最大位置と最小位置まで回転させてください。リミットストップのないジョイントの場合、回転範囲は時計回りまたは反時計回りに180°を超えてはいけません。すべてのジョイントをキャリブレーションした後、Enterキーを押して設定を保存してください。
フォロワーロボットアーム
フォロワーを/dev/ttyUSB1に接続するか、--teleop.portパラメータを変更してから実行してください:
Viola:
lerobot-calibrate --robot.type=lerobot_robot_viola --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraiviola_arm
Cello:
lerobot-calibrate --robot.type=lerobot_robot_cello --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraicello_arm
起動後、各ジョイントのエンコーダ値が表示されます。各ジョイントを手動で一つずつキャリブレーションする必要があります:各ジョイントを最大位置と最小位置まで回転させてください。リミットストップのないジョイントの場合、回転範囲は時計回りまたは反時計回りに180°を超えてはいけません。すべてのジョイントをキャリブレーションした後、Enterキーを押して設定を保存してください。
キャリブレーションファイルは以下のパスに保存されます:~/.cache/huggingface/lerobot/calibration/robotsと~/.cache/huggingface/lerobot/calibration/teleoperators。
デュアルアームキャリブレーション設定
チュートリアル
リーダーロボットアーム
left_arm_portを/dev/ttyUSB0に、right_arm_portを/dev/ttyUSB2に接続するか、--teleop.left_arm_portと--teleop.right_arm_portパラメータを変更してから実行してください:
lerobot-calibrate --teleop.type=lerobot_teleoperator_bimanual_leader --teleop.left_arm_port=/dev/ttyUSB0 --teleop.right_arm_port=/dev/ttyUSB2 --teleop.id=bi_starai_violin_leader
起動後、各ジョイントのエンコーダ値が表示されます。各ジョイントを手動で一つずつキャリブレーションする必要があります:各ジョイントを最大位置と最小位置まで回転させてください。リミットストップのないジョイントの場合、回転範囲は時計回りまたは反時計回りに180°を超えてはいけません。すべてのジョイントをキャリブレーションした後、Enterキーを押して設定を保存してください。
フォロワーロボットアーム
left_arm_portを/dev/ttyUSB1に、right_arm_portを/dev/ttyUSB3に接続するか、--robot.left_arm_portと--robot.right_arm_portパラメータを変更してから実行してください:
Viola:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_viola --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_viola_follower
Cello:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_cello --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_cello_follower
起動後、各ジョイントのエンコーダ値が表示されます。各ジョイントを手動で一つずつキャリブレーションする必要があります:各ジョイントを最大位置と最小位置まで回転させてください。リミットストップのないジョイントの場合、回転範囲は時計回りまたは反時計回りに180°を超えてはいけません。すべてのジョイントをキャリブレーションした後、Enterキーを押して設定を保存してください。
シングルアームとデュアルアーム設定の違いは、--teleop.typeと--robot.typeパラメータにあります。さらに、デュアルアーム設定では左右のアーム用に別々のUSBポートが必要で、合計4つのUSBポートが必要です:--teleop.left_arm_port、--teleop.right_arm_port、--robot.left_arm_port、--robot.right_arm_port。
デュアルアーム設定を使用する場合、テレオペレーション、データ収集、トレーニング、評価コマンドに適応するため、ロボットアームファイルタイプ--teleop.typeと--robot.type、およびUSBポート--teleop.left_arm_port、--teleop.right_arm_port、--robot.left_arm_port、--robot.right_arm_portを手動で変更する必要があります。
テレオペレーション
アームを図に示された位置に移動し、スタンバイに設定してください。
| Violin リーダーアーム | Viola フォロワーアーム |
|---|---|
| |
これでロボットをテレオペレーションする準備が整いました(カメラは表示されません)!この簡単なスクリプトを実行してください:
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
デュアルアーム
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
リモート操作コマンドは以下のパラメータを自動的に検出します:
- 不足しているキャリブレーションを特定し、キャリブレーション手順を開始します。
- ロボットとリモート操作デバイスを接続し、リモート操作を開始します。
プログラム開始後、Hover Lock Technologyは機能し続けます。
カメラの追加
Orbbec Gemini2 Depth Cameraを使用する場合

- 🚀 ステップ 1: Orbbec SDK 依存環境のインストール
-
pyorbbecリポジトリをクローンするcd ~/
git clone https://github.com/orbbec/pyorbbecsdk.git -
SDK の対応する .whl ファイル をダウンロードしてインストールする
pyorbbecsdk Releases にアクセスし、
Python バージョンに基づいて選択してインストールします。例:pip install pyorbbecsdk-x.x.x-cp310-cp310-linux_x86_64.whl -
pyorbbecディレクトリで依存関係をインストールするcd ~/pyorbbecsdk
pip install -r requirements.txtnumpyバージョンを1.26.0に強制ダウングレードするpip install numpy==1.26.0
赤いエラーメッセージは無視できます。
- Orbbec SDK を
~/lerobot/src/camerasディレクトリにクローンする
cd ~/lerobot/src/cameras
git clone https://github.com/ZhuYaoHui1998/orbbec.git
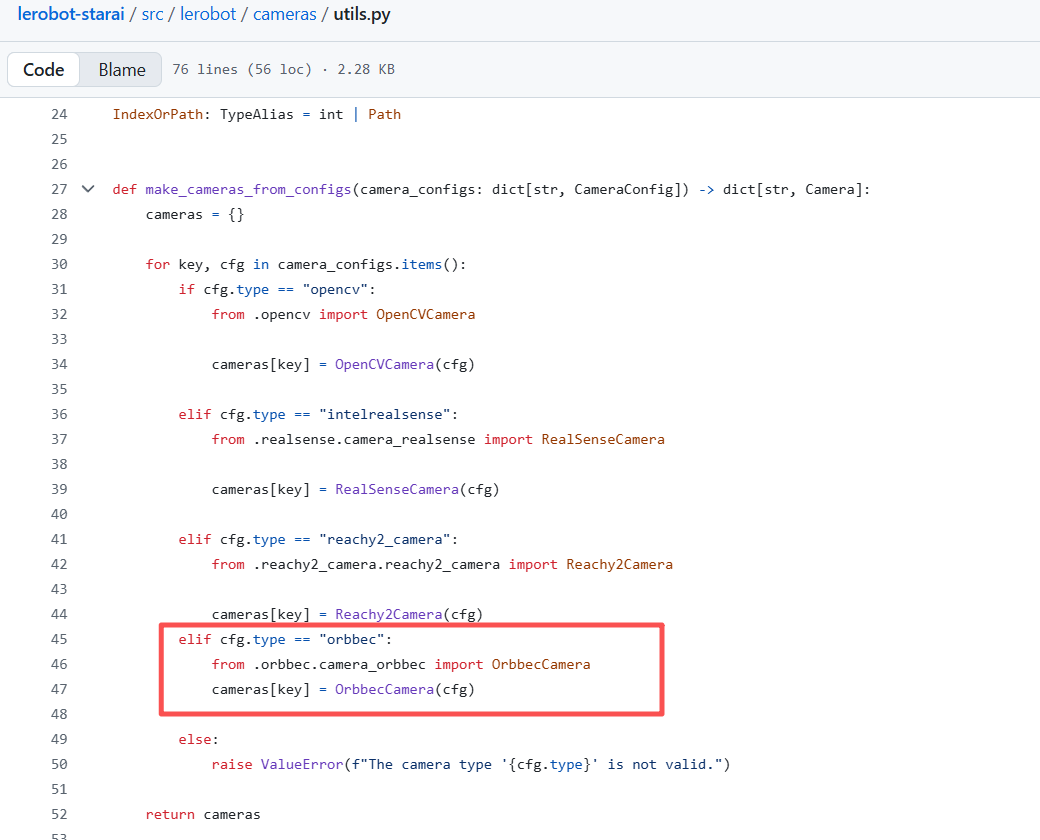
- utils.py と init.py を修正する
~/lerobot/src/lerobot/camerasディレクトリでutils.pyを見つけ、40行目に以下のコードを追加します:
elif cfg.type == "orbbec":
from .orbbec.camera_orbbec import OrbbecCamera
cameras[key] = OrbbecCamera(cfg)
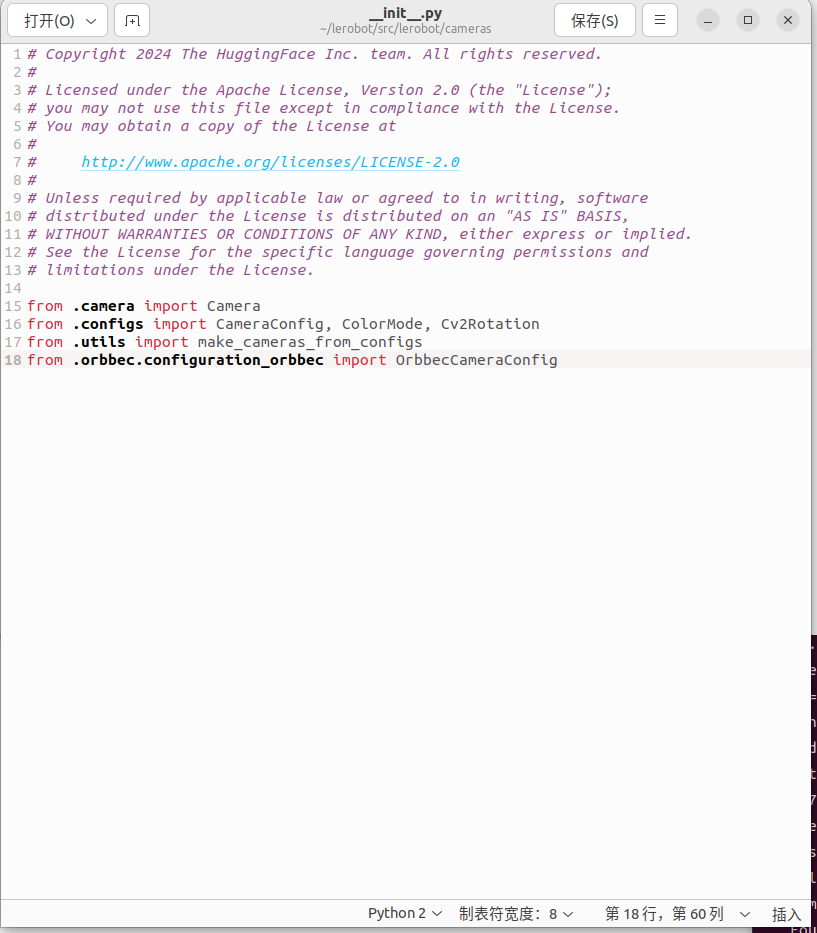
~/lerobot/src/lerobot/camerasディレクトリで__init__.pyを見つけ、18行目に以下のコードを追加します:
from .orbbec.configuration_orbbec import OrbbecCameraConfig
- 🚀 ステップ 2: 関数呼び出しと例
以下のすべての例では、starai_viola を使用している実際のロボットアームのモデル(例:so100 / so101)に置き換えてください。
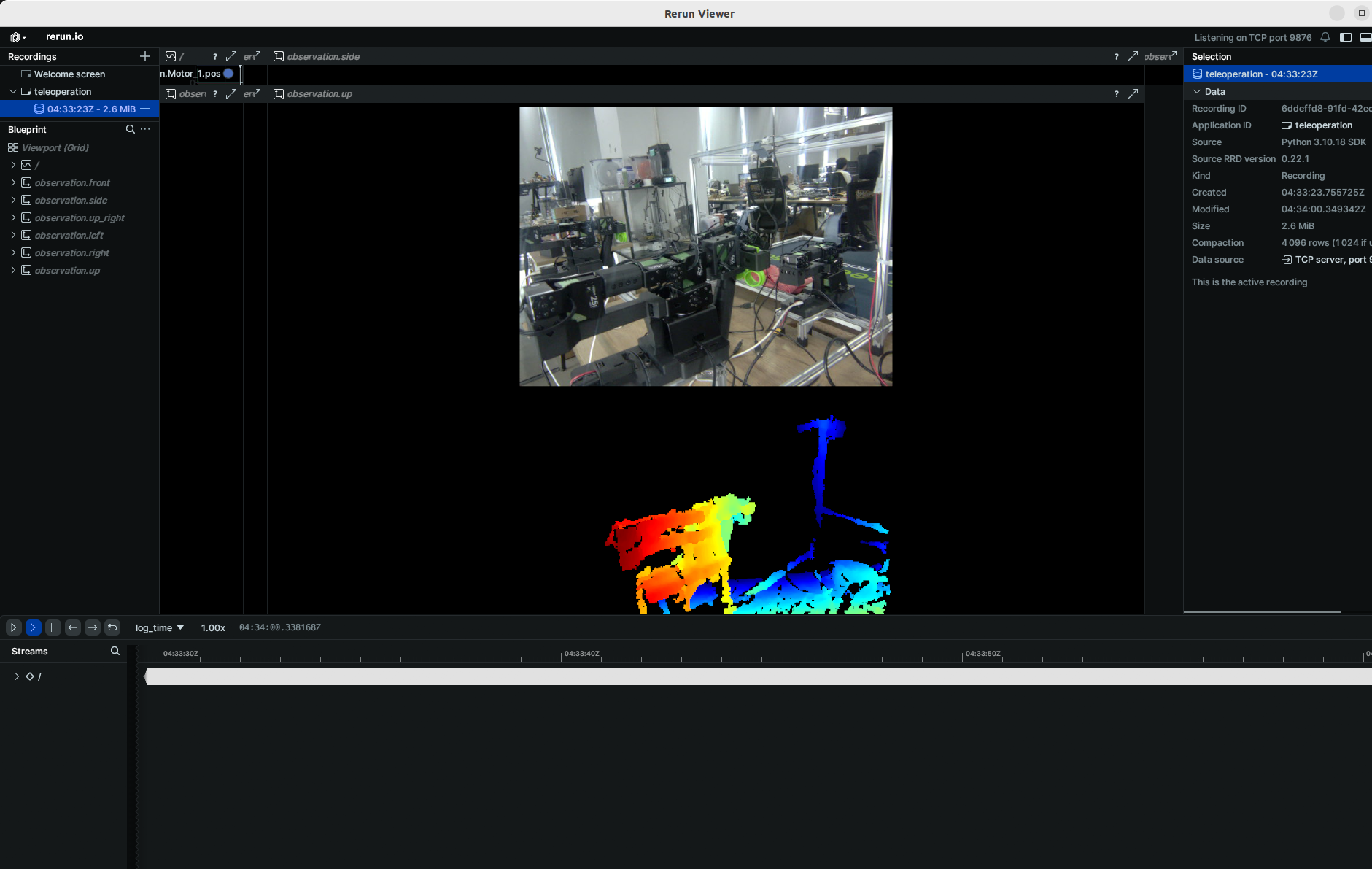
focus_area ハイパーパラメータを追加しました。遠すぎる深度データはロボットアームにとって意味がない(到達や把握ができない)ため、focus_area より小さいまたは大きい深度データは黒で表示されます。デフォルトの focus_area は (20, 600) です。
現在サポートされている解像度は幅:640、高さ:880 のみです。
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_starai_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
データ収集、トレーニング、評価などの後続タスクについては、通常の RGB コマンドと同じプロセスです。通常の RGB コマンドの関連部分を以下に置き換えるだけです:
--robot.cameras="{ front: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:(20,600)}}" \
その後、追加の単眼 RGB カメラを追加することもできます。
2つの USB カメラを挿入した後、以下のスクリプトを実行してカメラのポート番号を確認します。カメラは USB ハブに接続せず、デバイスに直接接続する必要があることを覚えておくことが重要です。USB ハブの低速度により、画像データの読み取りができなくなる可能性があります。
lerobot-find-cameras opencv # or realsense for Intel Realsense cameras
ターミナルに以下の情報が出力されます。例えば、ラップトップカメラは index 2、USB カメラは index 4 です。
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video2
Type: OpenCV
Id: /dev/video2
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video4
Type: OpenCV
Id: /dev/video4
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 360
Fps: 30.0
--------------------
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
各カメラで撮影された画像は outputs/images_from_opencv_cameras ディレクトリで確認でき、異なる位置のカメラに対応するポートインデックス情報を検証できます。
外部カメラを確認した後、以下のカメラ情報を実際のカメラ情報に置き換えると、リモート操作中にコンピュータでカメラを表示できるようになります:
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
fourcc: "MJPG" 形式の画像は圧縮されています。より高い解像度を試すことができ、YUYV 形式も試すことができます。ただし、後者は画像解像度と FPS を低下させ、ロボットアームの動作にラグを生じさせます。現在、MJPG 形式では、1920*1080 の解像度で 3 台のカメラをサポートしながら 30FPS を維持できます。とはいえ、同じ USB HUB を介して 2 台のカメラをコンピュータに接続することは推奨されません。
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
fourcc: "MJPG" 形式の画像は圧縮されています。より高い解像度を試すことができ、YUYV 形式も試すことができます。ただし、後者は画像解像度と FPS を低下させ、ロボットアームの動作にラグを生じさせます。現在、MJPG 形式では、1920*1080 の解像度で 3 台のカメラをサポートしながら 30FPS を維持できます。とはいえ、同じ USB HUB を介して 2 台のカメラをコンピュータに接続することは推奨されません。
デュアルアーム
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
fourcc: "MJPG" 形式の画像は圧縮されています。より高い解像度を試すことができ、YUYV 形式も試すことができます。ただし、後者は画像解像度と FPS を低下させ、ロボットアームの動作にラグを生じさせます。現在、MJPG 形式では、1920*1080 の解像度で 3 台のカメラをサポートしながら 30FPS を維持できます。とはいえ、同じ USB HUB を介して 2 台のカメラをコンピュータに接続することは推奨されません。
このようなバグが見つかった場合。
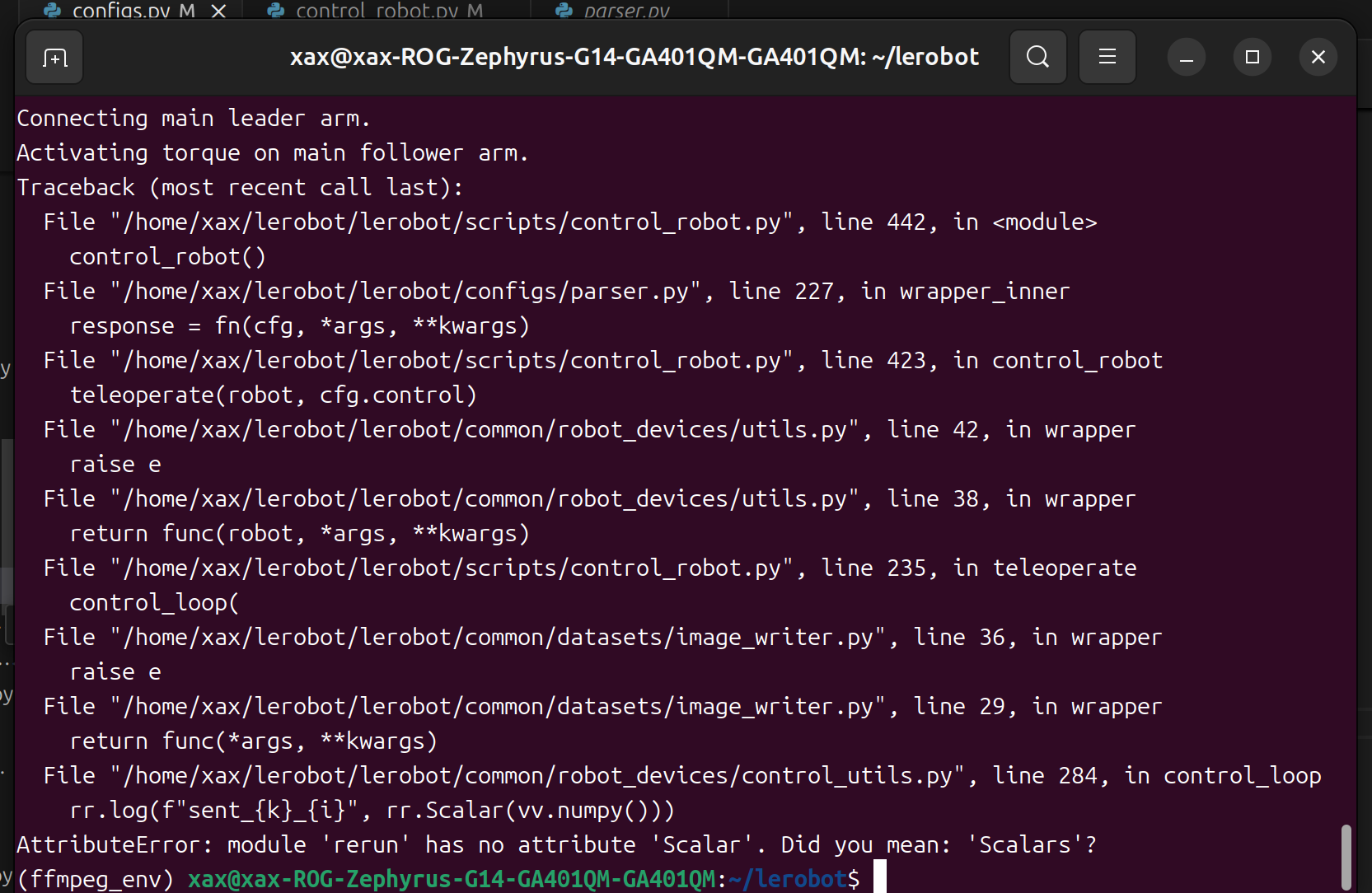
rerun バージョンをダウングレードして問題を解決できます。
pip3 install rerun-sdk==0.23
データセットの記録
テレオペレーションに慣れたら、最初のデータセットを記録できます。
データセットのアップロードにHugging Face hubの機能を使用したい場合で、以前に行ったことがない場合は、Hugging Face設定から生成できる書き込みアクセストークンを使用してログインしていることを確認してください:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
これらのコマンドを実行するために、Hugging Faceリポジトリ名を変数に保存します:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
10エピソードを記録し、データセットをhubにアップロードします:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
デュアルアーム
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
シングルアームとデュアルアームのセットアップを区別するため、ここでの--dataset.repo_idはstarai/record-test_bi_armと名付けられています。
Hugging Face Hubデータセットアップロード機能を使用したくない場合は、--dataset.push_to_hub=falseを選択できます。また、--dataset.repo_id=${HF_USER}/staraiをカスタムローカルフォルダ名(例:--dataset.repo_id=starai/record-test)に置き換えてください。データはシステムのホームディレクトリの~/.cache/huggingface/lerobotに保存されます。
Hubにアップロードしない場合:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
デュアルアーム
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
シングルアームとデュアルアームのセットアップを区別するため、ここでの--dataset.repo_idはstarai/record-test_bi_armと名付けられています。
recordは、ロボット操作中のデータキャプチャと管理のためのツールセットを提供します:
1. データストレージ
- データは
LeRobotDataset形式で保存され、記録プロセス中にディスクに保存されます。
2. チェックポイントと再開
- チェックポイントは記録中に自動的に作成されます。
- 問題が発生した場合、
--resume=trueで同じコマンドを再実行することで再開できます。記録を再開する際は、--dataset.num_episodesをデータセット内の目標総エピソード数ではなく、記録する追加エピソード数に設定する必要があります! - 最初から記録を開始するには、データセットディレクトリを手動で削除してください。
3. 記録パラメータ
コマンドラインパラメータを使用してデータ記録ワークフローを設定します:
Parameter Description
- warmup-time-s: The initialization time.
- episode-time-s: The duration for each data collection session.
- reset-time-s: The preparation time between each data collection.
- num-episodes: The expected number of data sets to collect.
- push-to-hub: Determines whether to upload the data to HuggingFace Hub.
4. 記録中のキーボード操作
キーボードショートカットを使用してデータ記録ワークフローを制御します:
- **右矢印キー(→)**を押す:現在のエピソードを早期停止または時間をリセットし、次のエピソードに移動します。
- **左矢印キー(←)**を押す:現在のエピソードをキャンセルし、再記録します。
- ESCを押す:セッションを即座に停止し、ビデオをエンコードし、データセットをアップロードします。
キーボードが動作しない場合は、pynputの別のバージョンをインストールする必要があるかもしれません。
pip install pynput==1.6.8
エピソードの再生
ロボットで最初のエピソードを再生してみましょう:
Viola:
lerobot-replay \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
デュアルアーム
Viola:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
ポリシーの訓練と評価
ACT
ACTを参照してください
訓練
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_viola_test \
--job_name=act_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_cello_test \
--job_name=act_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
デュアルアーム
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_viola_test \
--job_name=act_bi_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_cello_test \
--job_name=act_bi_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
policy.typeはdiffusion,pi0,pi0fastの入力をサポートします- データセットをパラメータとして提供します:
dataset.repo_id=starai/record-test。 configuration_act.pyから設定を読み込みます。重要なことに、このポリシーはロボットのモーター状態、モーターアクション、カメラの数に自動的に適応し、データセットに保存されます。- 訓練チャートを可視化するためにWeights and Biasesを使用する
wandb.enable=trueを提供します。これはオプションですが、使用する場合はwandb loginを実行してログインしていることを確認してください。
評価
10回の評価エピソードを記録するには、以下のコマンドを実行してください:
Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraicello_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
デュアルアーム
Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_viola_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_viola_test/checkpoints/last/pretrained_model
Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_cello_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_cello_test/checkpoints/last/pretrained_model
ご覧のとおり、これは以前に訓練データセットを記録するために使用したコマンドとほぼ同じですが、いくつかの変更があります:
-
--policy.pathパラメータは、訓練済みポリシー重みファイルへのパスを示します(例:outputs/train/act_viola_test/checkpoints/last/pretrained_model)。モデル重みをHubにアップロードしている場合は、モデルリポジトリも使用できます(例:${HF_USER}/starai)。 -
評価データセット
dataset.repo_idの名前はeval_で始まります。この操作により、評価フェーズ専用のビデオとデータが記録され、eval_で始まるフォルダ(例:starai/eval_record-test)に保存されます。 -
評価フェーズで
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/starai/eval_xxxx'が発生した場合は、eval_で始まるフォルダを削除してプログラムを再実行してください。 -
mean is infinity. You should either initialize with stats as an argument or use a pretrained modelが発生した場合は、--robot.camerasパラメータのupやfrontなどのキーワードがデータ収集フェーズで使用されたものと厳密に一致していることを確認してください。
SmolVLA
SmolVLAを参照してください
pip install -e ".[smolvla]"
訓練
lerobot-train \
--policy.path=lerobot/smolvla_base \ # <- Use pretrained fine-tuned model
--dataset.repo_id=${HF_USER}/mydataset \
--batch_size=64 \
--steps=20000 \
--output_dir=outputs/train/my_smolvla \
--job_name=my_smolvla_training \
--policy.device=cuda \
--wandb.enable=true
評価
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 1280, height: 720, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 1280, height: 720, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--dataset.repo_id=${HF_USER}/eval_DATASET_NAME_test \
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=so100_leader \
# --teleop.port=/dev/ttyACM0 \
# --teleop.id=my_red_leader_arm \
--policy.path=HF_USER/FINETUNE_MODEL_NAME # <- Use your fine-tuned model
Libero
Liberoを参照してください
LIBEROは生涯ロボット学習を研究するために設計されたベンチマークです。ロボットは工場で一度だけ事前訓練されるのではなく、時間をかけて人間のユーザーと共に学習し適応し続ける必要があるという考えです。この継続的な適応は意思決定における生涯学習(LLDM)と呼ばれ、真にパーソナライズされたヘルパーとなるロボットを構築するための重要なステップです。
LIBEROには5つのタスクスイートが含まれています:
-
LIBERO-Spatial (libero_spatial) – 空間関係についての推論を必要とするタスク。
-
LIBERO-Object (libero_object) – 異なるオブジェクトの操作を中心としたタスク。
-
LIBERO-Goal (libero_goal) – ロボットが変化する目標に適応しなければならない目標条件付きタスク。
-
LIBERO-90 (libero_90) – LIBERO-100コレクションからの90の短期間タスク。
-
LIBERO-Long (libero_10) – LIBERO-100コレクションからの10の長期間タスク。
これらのスイートは合わせて130のタスクをカバーし、シンプルなオブジェクト操作から複雑な多段階シナリオまで幅広く対応しています。LIBEROは時間とともに成長し、コミュニティが生涯学習アルゴリズムをテストし改善できる共有ベンチマークとして機能することを目的としています。
トレーニング
lerobot-train \
--policy.type=smolvla \
--policy.repo_id=${HF_USER}/libero-test \
--dataset.repo_id=HuggingFaceVLA/libero \
--env.type=libero \
--env.task=libero_10 \
--output_dir=./outputs/ \
--steps=100000 \
--batch_size=4 \
--eval.batch_size=1 \
--eval.n_episodes=1 \
--eval_freq=1000 \
評価
LIBEROをインストールするには、LeRobot公式の手順に従った後、次のコマンドを実行してください:pip install -e ".[libero]"
単一スイート評価
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object \
--eval.batch_size=2 \
--eval.n_episodes=3
-
--env.taskでスイート(libero_object、libero_spatialなど)を選択します。 -
--eval.batch_sizeで並列実行する環境数を制御します。 -
--eval.n_episodesで実行する総エピソード数を設定します。
マルチスイート評価
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object,libero_spatial \
--eval.batch_size=1 \
--eval.n_episodes=2
- マルチスイート評価には、
--env.taskにカンマ区切りのリストを渡します。
Pi0
Pi0を参照してください
pip install -e ".[pi]"
トレーニング
lerobot-train \
--policy.type=pi0 \
--dataset.repo_id=seeed/eval_test123 \
--job_name=pi0_training \
--output_dir=outputs/pi0_training \
--policy.pretrained_path=lerobot/pi0_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--policy.dtype=bfloat16 \
--steps=20000 \
--policy.device=cuda \
--batch_size=32 \
--wandb.enable=false
評価
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi0_training/checkpoints/last/pretrained_model
Pi0.5
Pi0.5を参照してください
pip install -e ".[pi]"
トレーニング
lerobot-train \
--dataset.repo_id=seeed/eval_test123 \
--policy.type=pi05 \
--output_dir=outputs/pi05_training \
--job_name=pi05_training \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=false \
--policy.dtype=bfloat16 \
--steps=3000 \
--policy.device=cuda \
--batch_size=32
評価
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi05_training/checkpoints/last/pretrained_model
GR00T N1.5
GR00T N1.5を参照してください
特定のチェックポイントからトレーニングを再開します。
Viola:
lerobot-train \
--config_path=outputs/train/act_viola_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
Cello:
lerobot-train \
--config_path=outputs/train/act_cello_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
FAQ
-
このドキュメントのチュートリアルを使用する場合は、推奨されるGitHubリポジトリを
git cloneしてください:https://github.com/servodevelop/lerobot.git。 -
テレオペレーションは正常に動作するが、カメラ付きテレオペレーションで画像インターフェースが表示されない場合は、こちらを参照してください。
-
データセットテレオペレーション中にlibtiffの問題が発生した場合は、libtiffのバージョンを更新してください。
conda install libtiff==4.5.0 # for Ubuntu 22.04, use libtiff==4.5.1 -
LeRobotをインストールした後、GPU版のPyTorchが自動的にアンインストールされる場合があるため、torch-gpuを手動でインストールする必要があります。
-
Jetsonの場合は、
conda install -y -c conda-forge ffmpegを実行する前に、まずPyTorchとTorchvisionをインストールしてください。そうしないと、torchvisionのコンパイル時にバージョンの不一致問題が発生します。 -
3060 8GBラップトップでACTデータの50エピソードをトレーニングするには約6時間かかり、4090またはA100コンピューターでは約2-3時間かかります。
-
データ収集中は、カメラの位置と角度の安定性、環境照明を確保し、カメラに映る不安定な背景や歩行者を最小限に抑えてください。そうしないと、デプロイメント環境の大幅な変化により、ロボットアームが正常にオブジェクトを把握できなくなる可能性があります。
-
データ収集コマンドの
num-episodesは十分なデータ収集を確保し、途中で手動で一時停止しないでください。これは、データの平均と分散がデータ収集完了後にのみ計算されるためで、これはトレーニングに必要です。 -
プログラムがUSBカメラの画像データを読み取れないというプロンプトが表示される場合は、USBカメラがハブ経由で接続されていないことを確認してください。USBカメラは高速な画像転送レートを確保するため、デバイスに直接接続する必要があります。
引用
StarAI Robot Arm ROS2 Moveit2:star-arm-moveit2
lerobot-starai github:lerobot-starai
STEP:STEP
URDF:URDF
Huggingfaceプロジェクト:Lerobot
ACTまたはALOHA:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
VQ-BeT:VQ-BeT: Behavior Generation with Latent Actions
Diffusion Policy:Diffusion Policy
TD-MPC:TD-MPC
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。