Lerobot の SO-ARM 用ステアリングギアデバッグツール
はじめに
Steering Gear Debugging Tool(Seeed_RoboController)は、Lerobot/SO-ARM ロボットアーム用のグラフィカルなデバッグツールです。このツールを使用すると、サーボの状態を素早く検出し、サーボ ID を再キャリブレーションし、ニュートラル値を書き込み、個々のサーボを制御し、ロボットアームのキャリブレーションファイルを管理できます。これにより、リーダーアームおよびフォロワーアームの組み立て、デバッグ、保守が容易になります。
1. インストール
Windows、Ubuntu、Mac システムに対応しています。
1. まず、リポジトリをクローンします。
git clone https://github.com/Seeed-Projects/Seeed_RoboController.git
2. Lerobot の仮想環境にこのツールをインストールすることを推奨します。スタンドアロンでインストールしたい場合は、新しい仮想環境を作成して、システムの Python を汚染しないようにしてください。
pip install -r requirements.txt
3. 環境をチェックします。[OK] Environment check passed と表示されれば、プロジェクトを実行する準備が整っています。
python setup.py
4. ツールを起動します。
次のコマンドを実行して、対話的なポート選択を開始します。
python -m src.gui.factory_calibration_tool
(オプション)ポートが占有されている場合は、手動でポートを指定します。
python -m src.gui.factory_calibration_tool --port1 /dev/ttyUSB0 --port2 /dev/ttyUSB1
2. クイックスタート(リーダーアームおよびフォロワーアームに適用)
1. サーボが正常かどうかを確認する
まず、シリアルポート選択で対応するポート番号を選択します。
サーボ 1〜6 がすべて正常に検出されていれば、サーボが正しく認識されており、基本機能が動作していることを意味します。
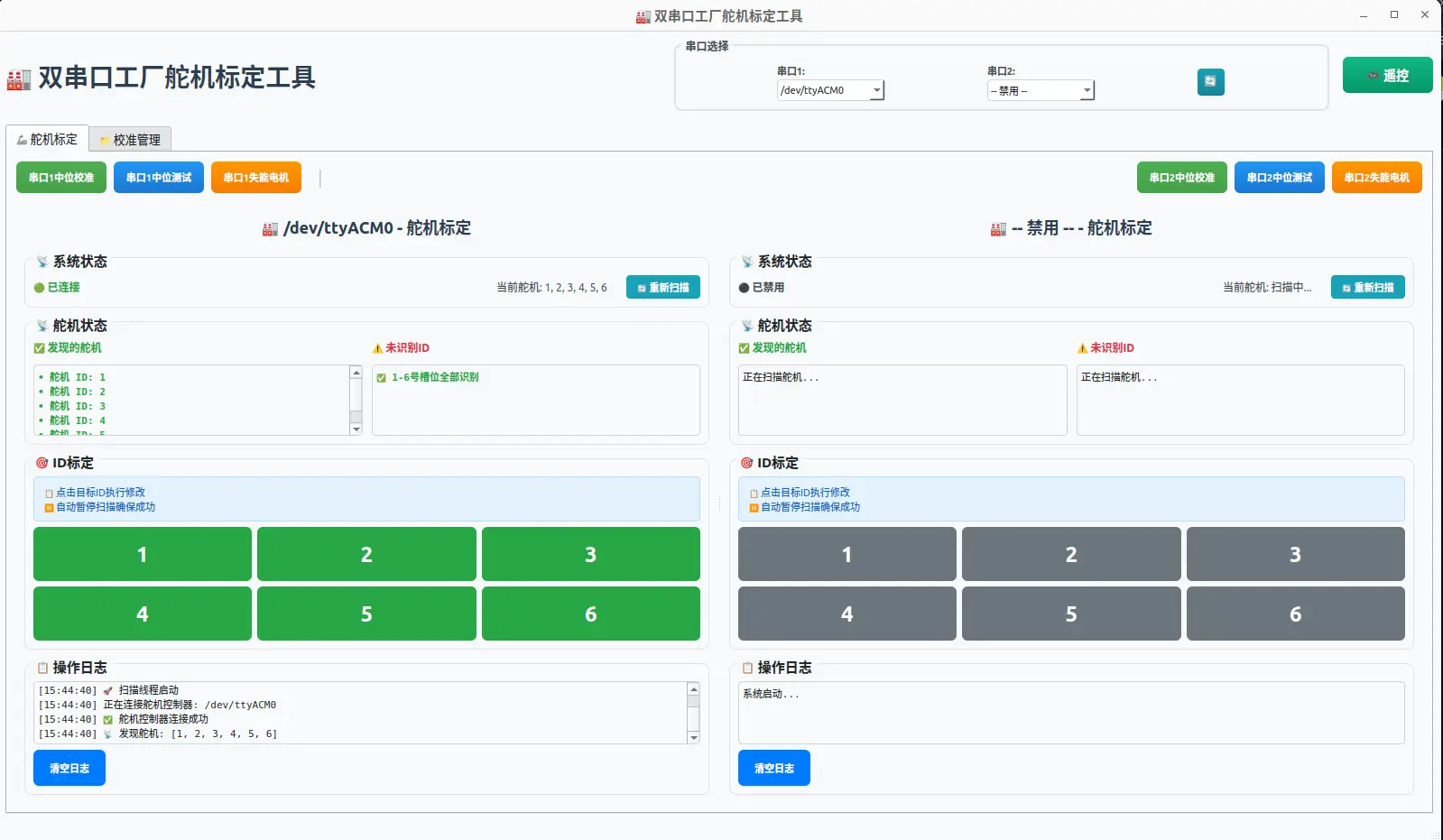
一部のサーボが未検出と表示される場合は、まず配線が正しいかを確認し、ページを閉じて再度開いてください。それでも検出されない場合は、サーボ ID が重複している可能性があります(ロボットアームのキャリブレーション用コマンドを誤ってサーボのキャリブレーション用コマンドとして入力してしまった可能性があります)。この場合、これらのサーボの ID を再キャリブレーションする必要があります。

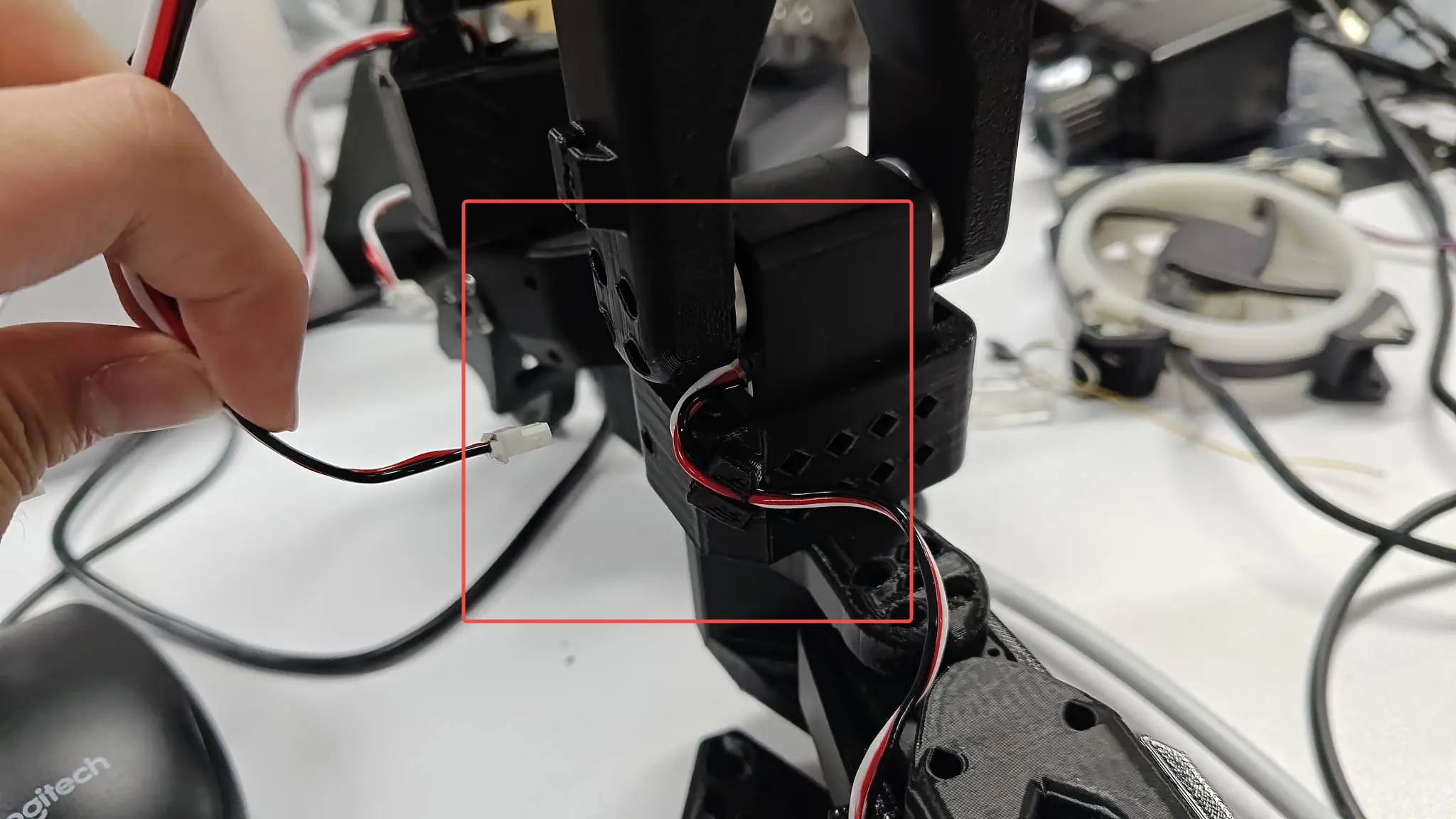
2. サーボの配線ハーネスを取り外す
まず、サーボ 6 とサーボ 5 の間の接続ハーネスを取り外します。

次に、サーボ 5 とサーボ 4 の間の接続ハーネスを取り外します。
サーボ 4 とサーボ 3 の間の接続ハーネスを取り外します。
サーボ 3 とサーボ 2 の間の接続ハーネスを取り外します。
サーボ 2 とサーボ 1 の間の接続ハーネスを取り外します。
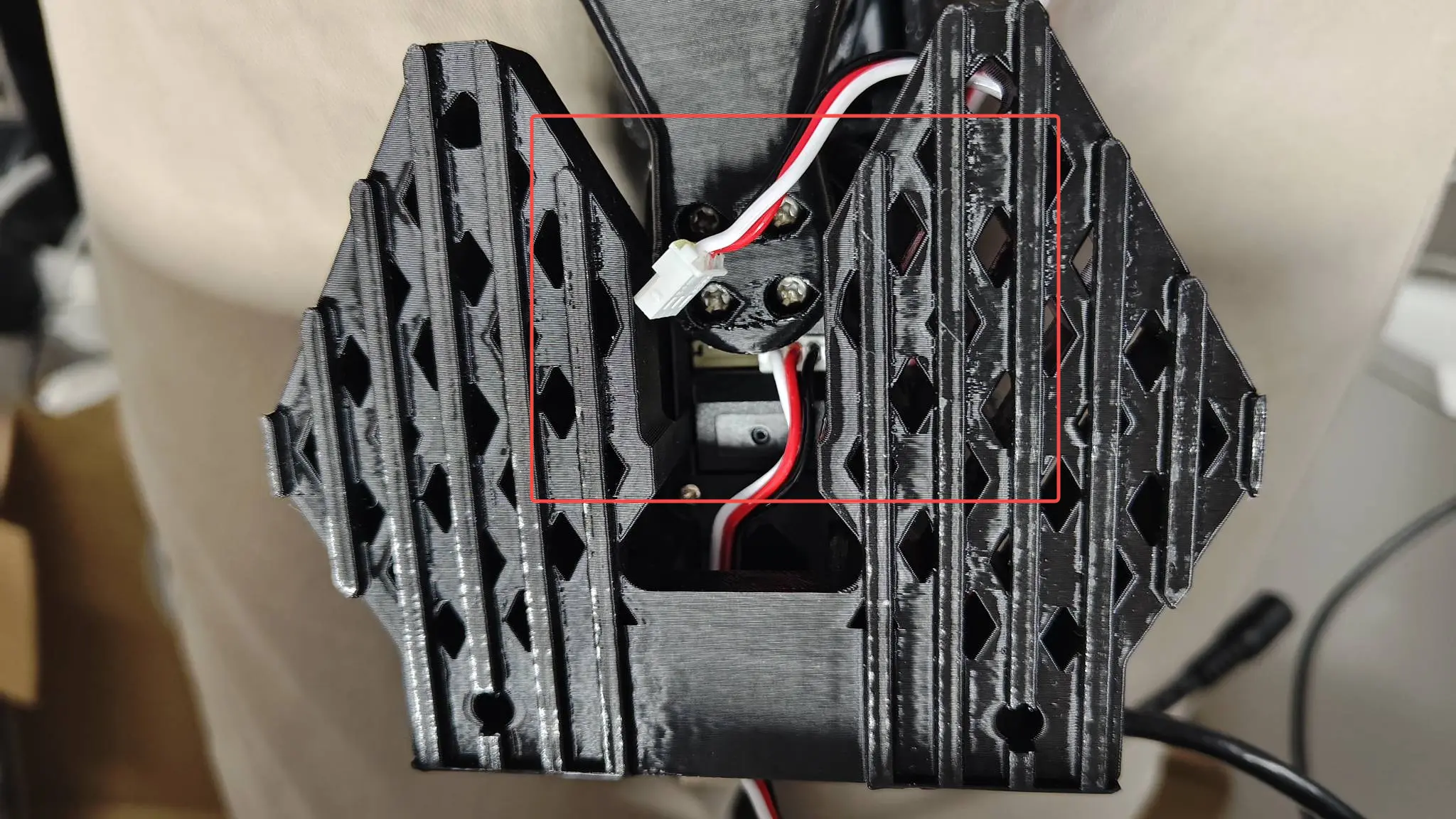
サーボ 1 と制御ボードの間の接続ハーネスを取り外します。
3. サーボ ID を再キャリブレーションする
必ず 1 つのサーボだけがロボットアームに接続されている状態にしてください。
(サーボに ID を書き込む際、サーボはシリアルバスを共有しているため、重複した ID が存在すると、たとえば ID 4 を 6 に変更した場合、バス上の ID 4 を持つすべてのサーボが 6 に変更されてしまいます。そのため、すべてのサーボを取り外し、1 つずつ再書き込みする必要があります。)
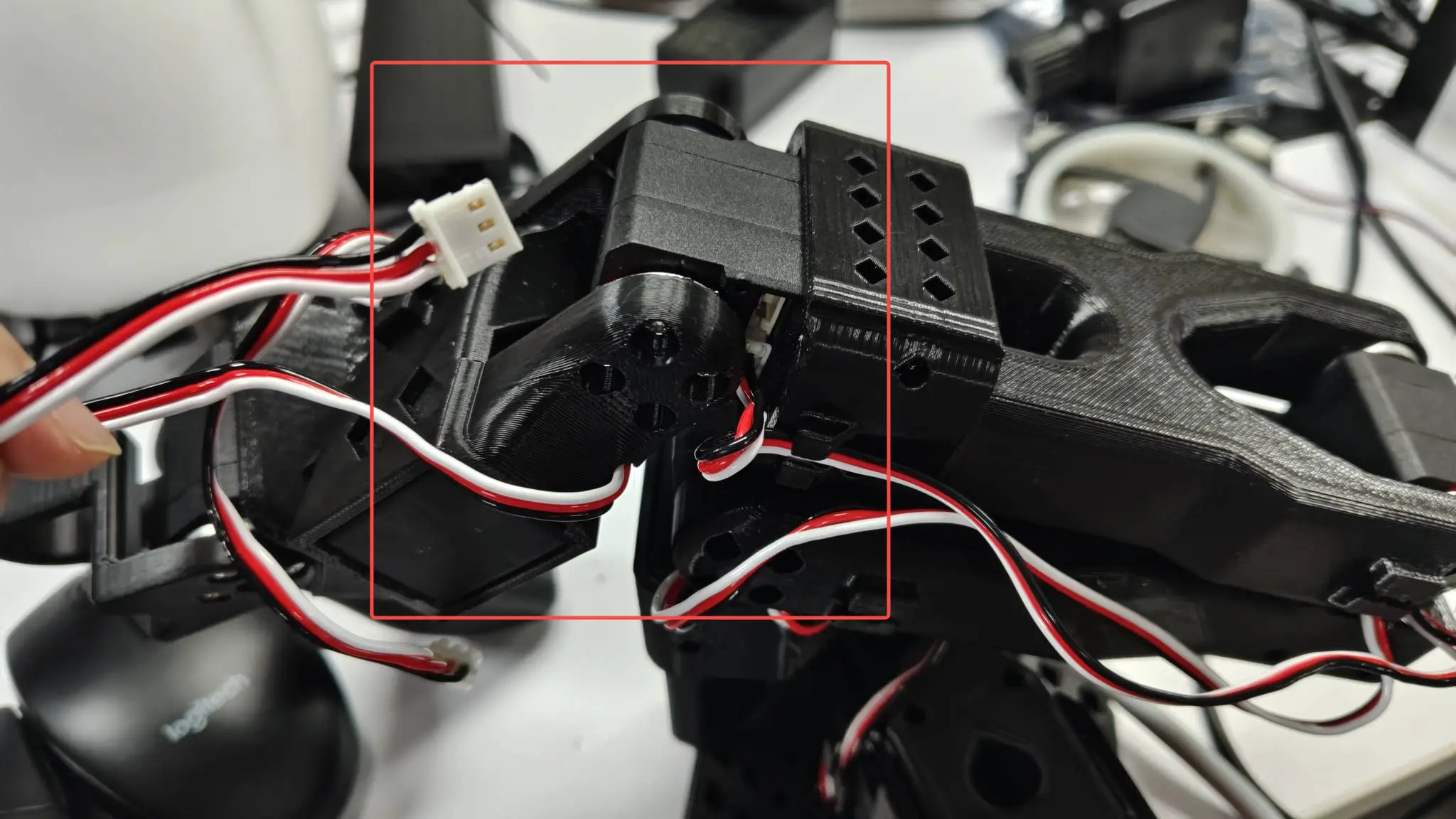
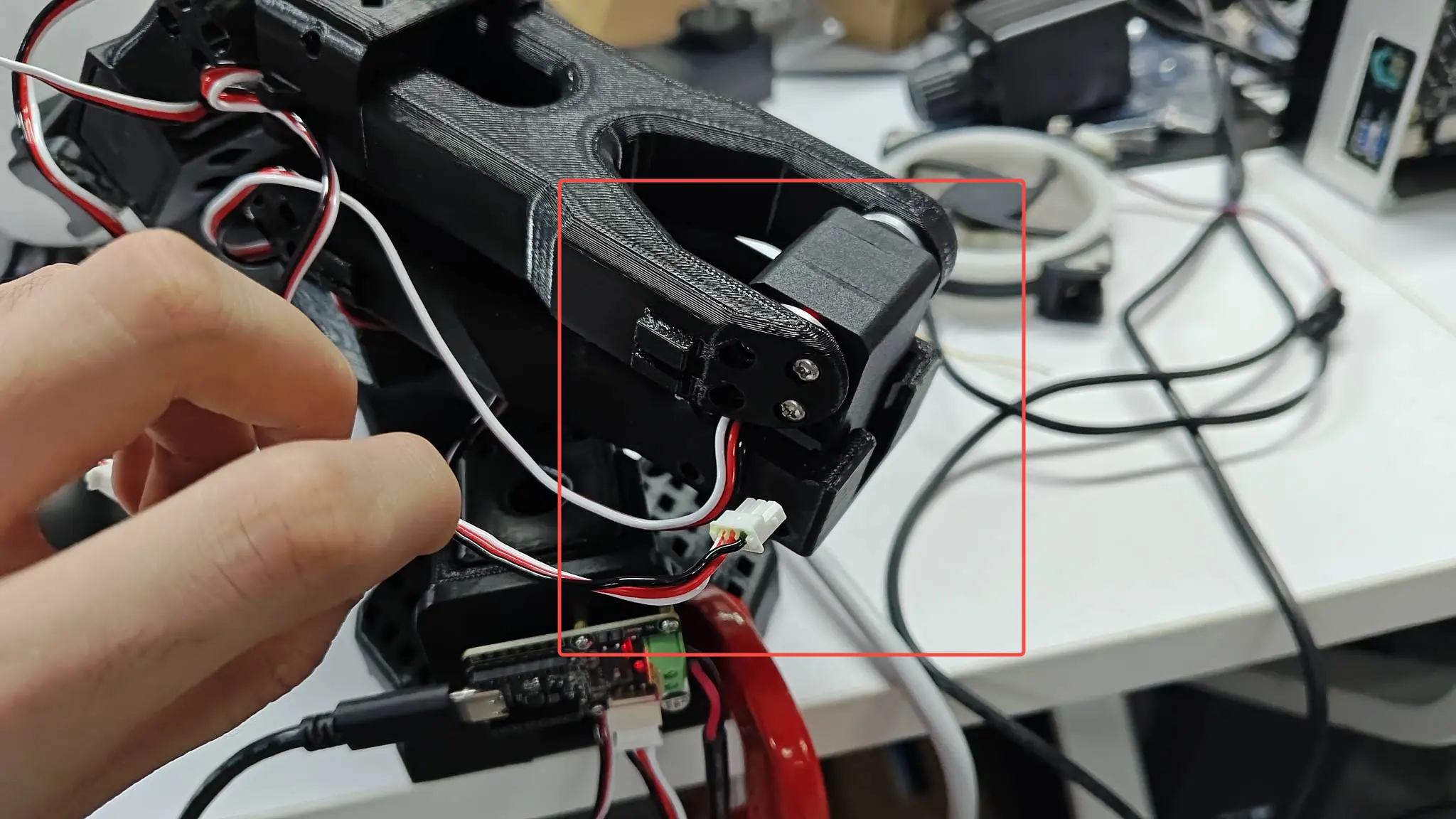
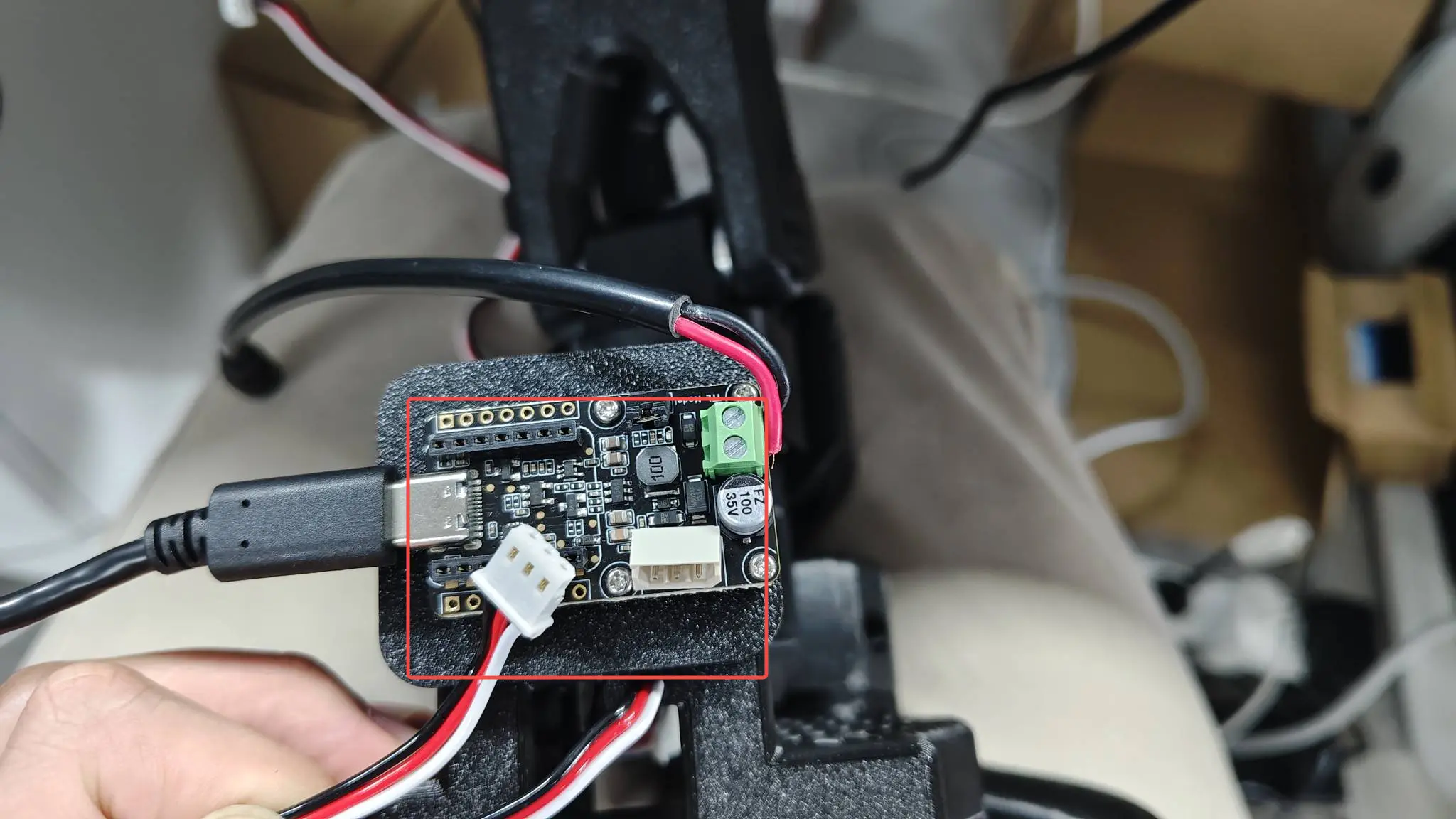
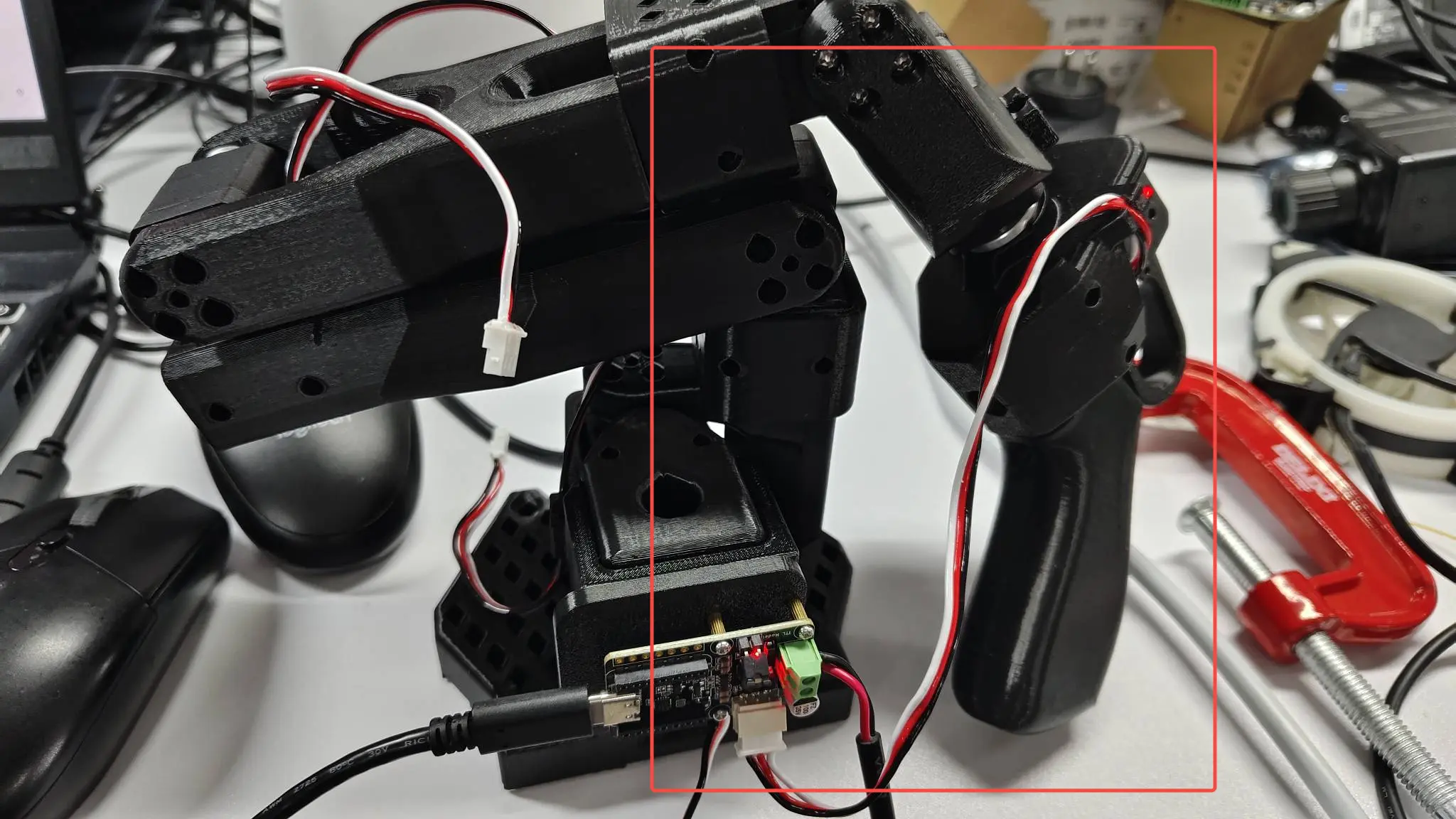
例えば、下図のように #6 サーボをドライバボードに接続できます。他のサーボも同様の方法で接続できるため、ロボットアームを分解せずに作業できます。
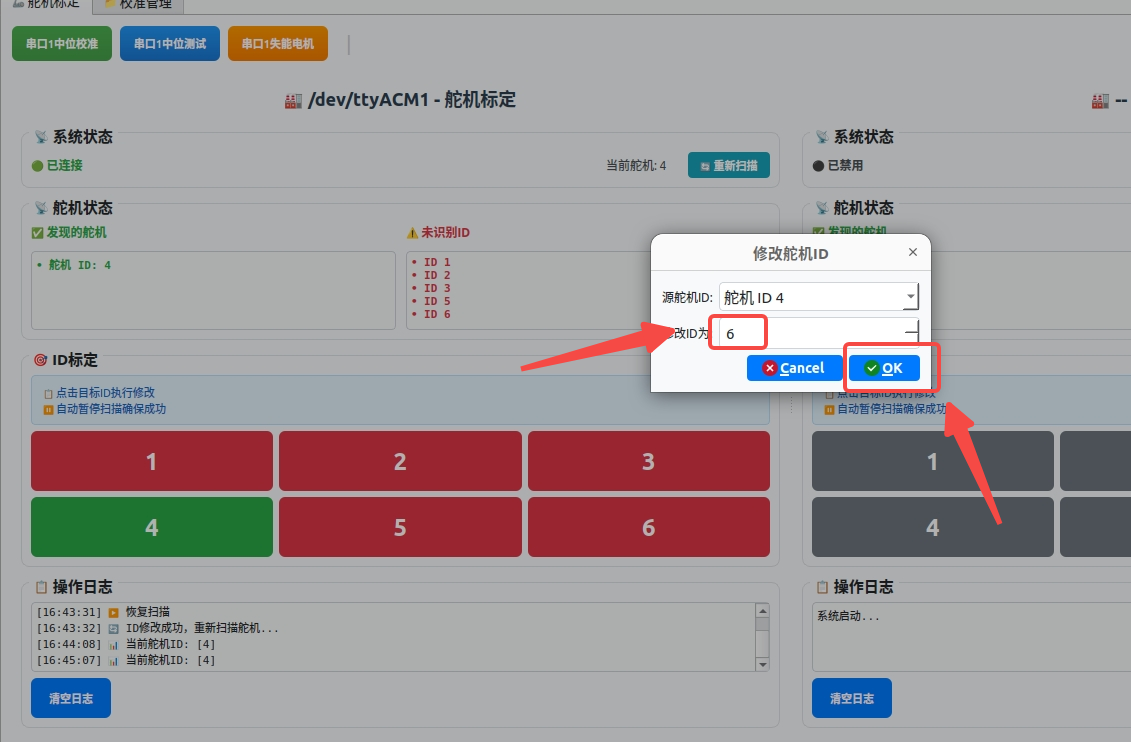
図のように、認識されているのはサーボ #4 だけですが、実際に接続されているのは #6 です。これはサーボ ID が誤っており、6 に戻す必要があることを示しています。

この時点で、サーボ #4 をクリックして、その ID を 6 に変更できます。他のサーボについても同じ操作を繰り返します。
サーボのキャリブレーションが完了したら、配線を 1 本ずつ差し戻して作業完了です。
4. サーボにニュートラル値を書き込む
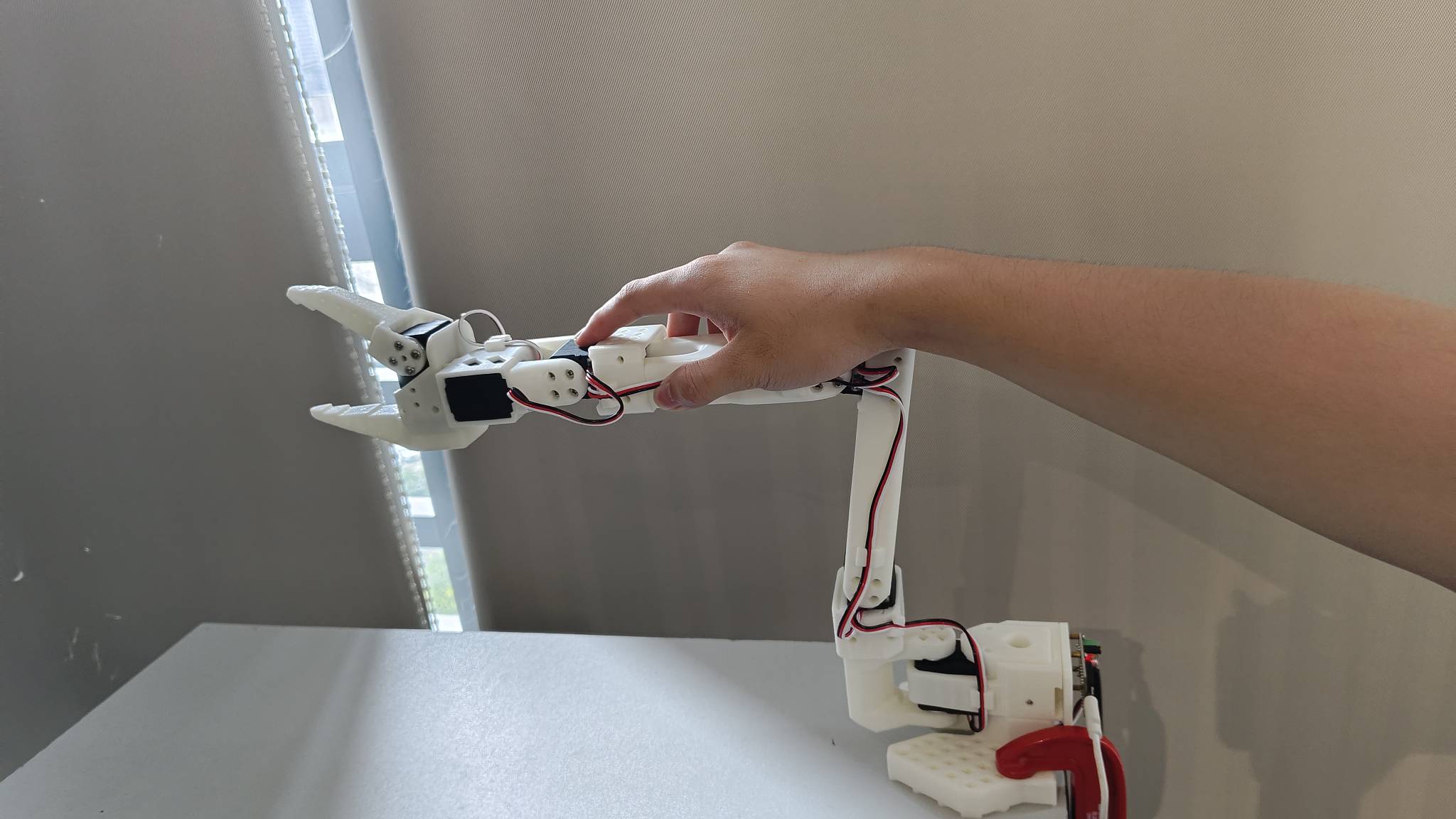
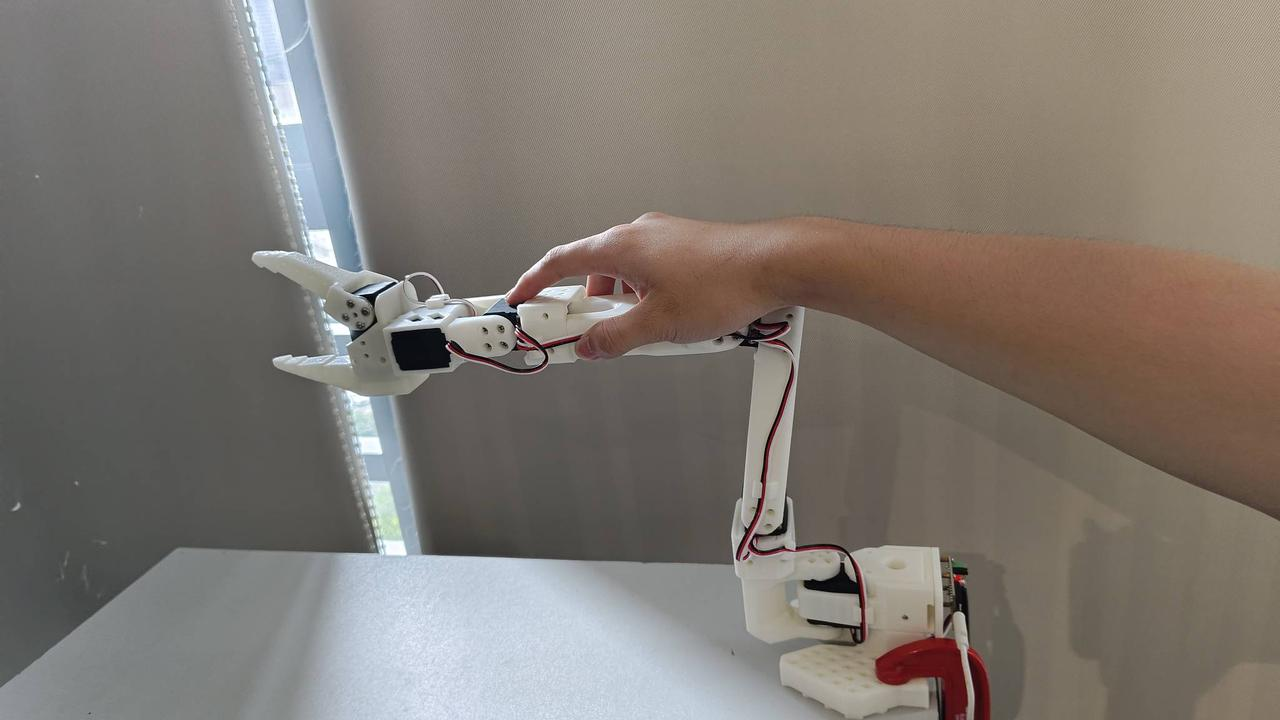
1. Serial Port Neutral Test をクリックして、ロボットアームのニュートラル位置が上図のようになっているかを確認します。おおよそ同じであれば、ロボットアームのニュートラル値は正常です。
2. そうでない場合は、ロボットアームをニュートラル位置に移動させてから Serial Port Neutral Calibration をクリックします。ロボットアームは現在位置をニュートラル値としてサーボに書き込みます。
3. Serial Port Disable Motors をクリックすると、ロボットアームの力が抜けるので、手で支える必要があります。

5. 単一サーボの制御
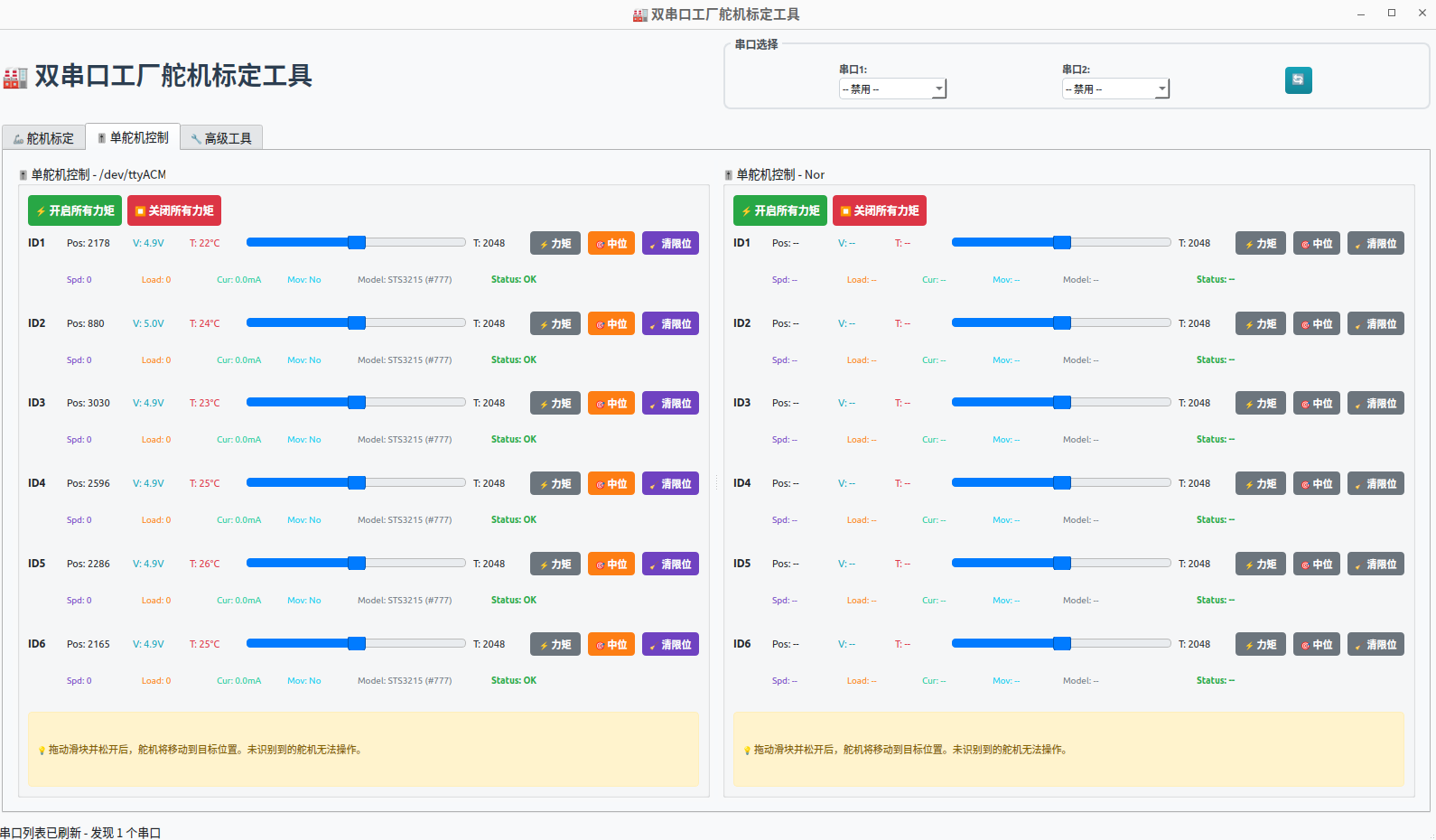
デフォルトでは、ページ上のすべてのサーボは図のようにニュートラル位置にあります。
-
- まずトルクを有効にします。ワンクリックですべてのトルクを有効にすることも、単一のサーボのトルクだけを有効にすることもできます。その後、スライダーを動かしてサーボを対応する位置に移動させます。ただし、必ずゆっくり動かしてください。ロボットアームの 3D プリント部品が物理的に一部の位置を干渉するため、アームは実際には端の位置まで到達できません。可動範囲には最大値と最小値の制限があるので、スライダーを 0 や最大値まで動かさないでください。トルクを無効にすると、ロボットアームの力が抜けます。
上図のように、トルクを有効にすると、対応するサーボの動きが変化します。
-
- 単一のサーボに対してニュートラルキャリブレーションを行い、サーボ内部のニュートラルおよび最大・最小位置をクリアできます
-
- 以下はサーボ情報です
Pos: 位置
V: 電圧
T: 温度
Spd: 速度
Load: トルク
Cur: 電流
Mov: 動作状態
Model: モデル、権限
Status: 状態には Normal、Overcurrent、Overload が表示されます
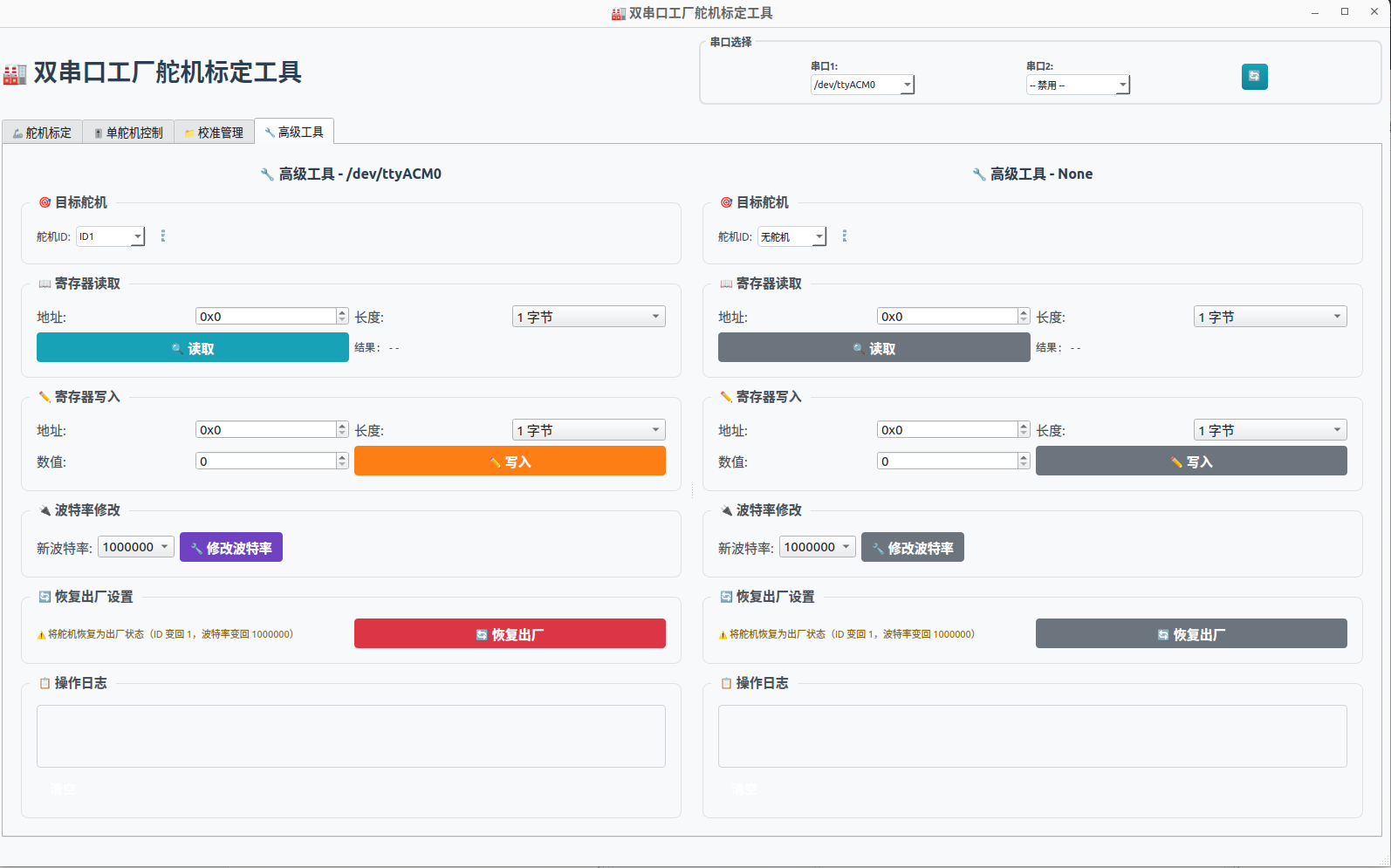
6. 高度なツール
対応するレジスタアドレスのデータを読み取り、対応するデータを書き込むことができます。
ボーレートを変更できます。
工場出荷時設定に復元できます。