MeshCore ソースコード開発チュートリアル
前提条件
必要なツール
始める前に、次のツールを準備してください:
PlatformIO のインストール
VS Code の拡張機能マーケットプレイスで PlatformIO を検索してインストールします。
インストール後、左側のツールバーにアリの形をしたアイコンが表示されます。
プロジェクトの準備
プロジェクトを配置したいフォルダを開きます。ターミナルでそのフォルダを開きます。ここをクリックしてプロジェクトを git clone します。
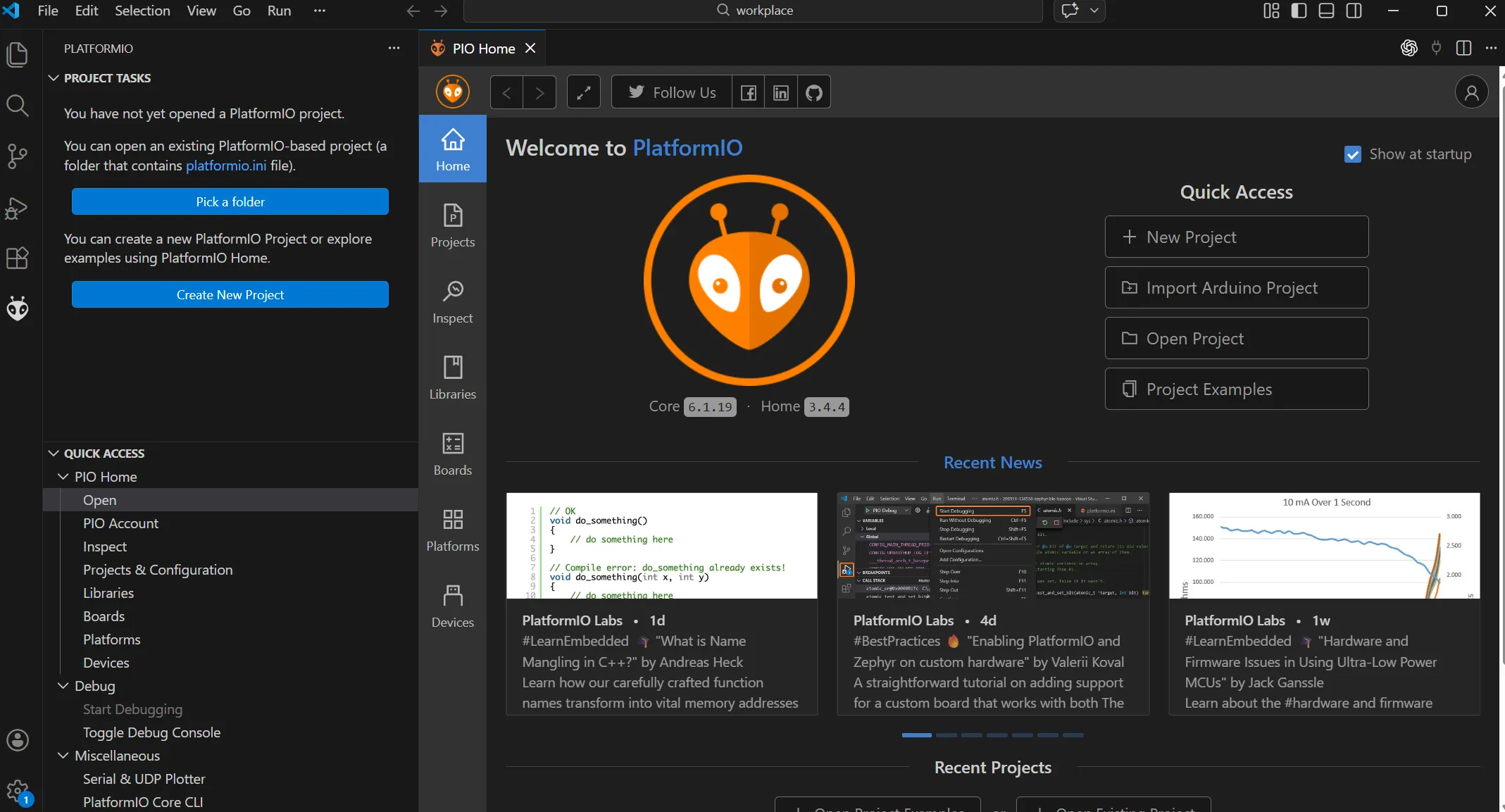
VSCode を開き、PlatformIO アイコンをクリックして select a folder を選択します。クローンしたプロジェクトのフォルダを選択します。
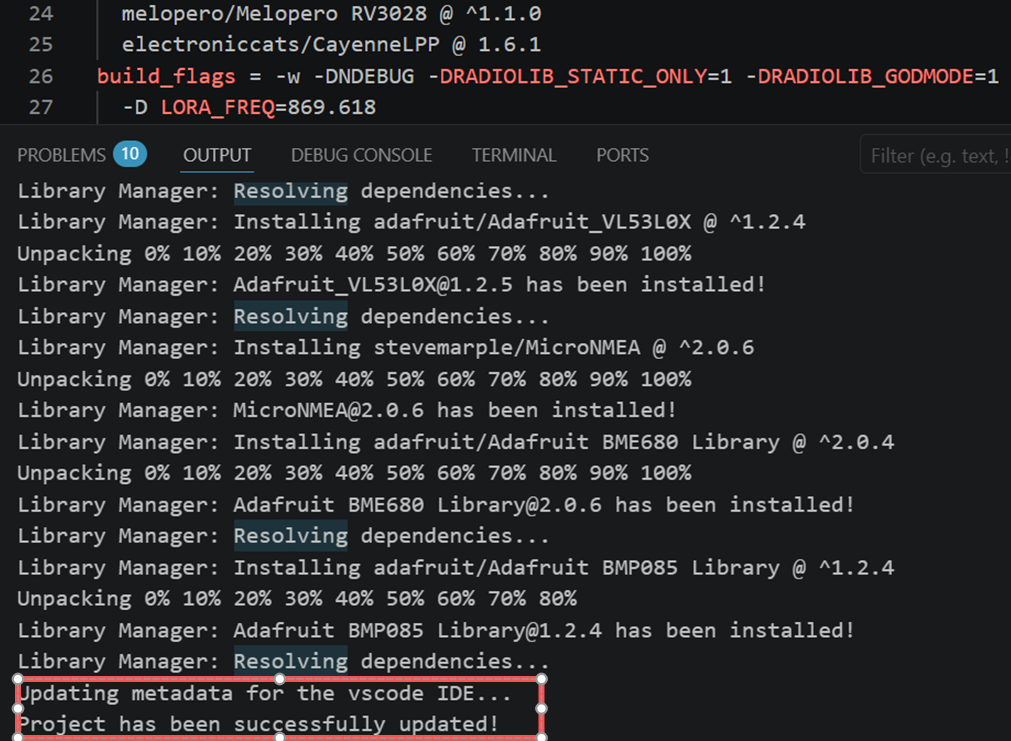
PlatformIO は必要な依存関係を自動的にインストールします。インストールが成功すると、Project has been successfully updated が表示されます。
ファームウェア開発
開発チュートリアル
対象ボード用の environment(環境)を探します。例として Solar node repeater を使います:
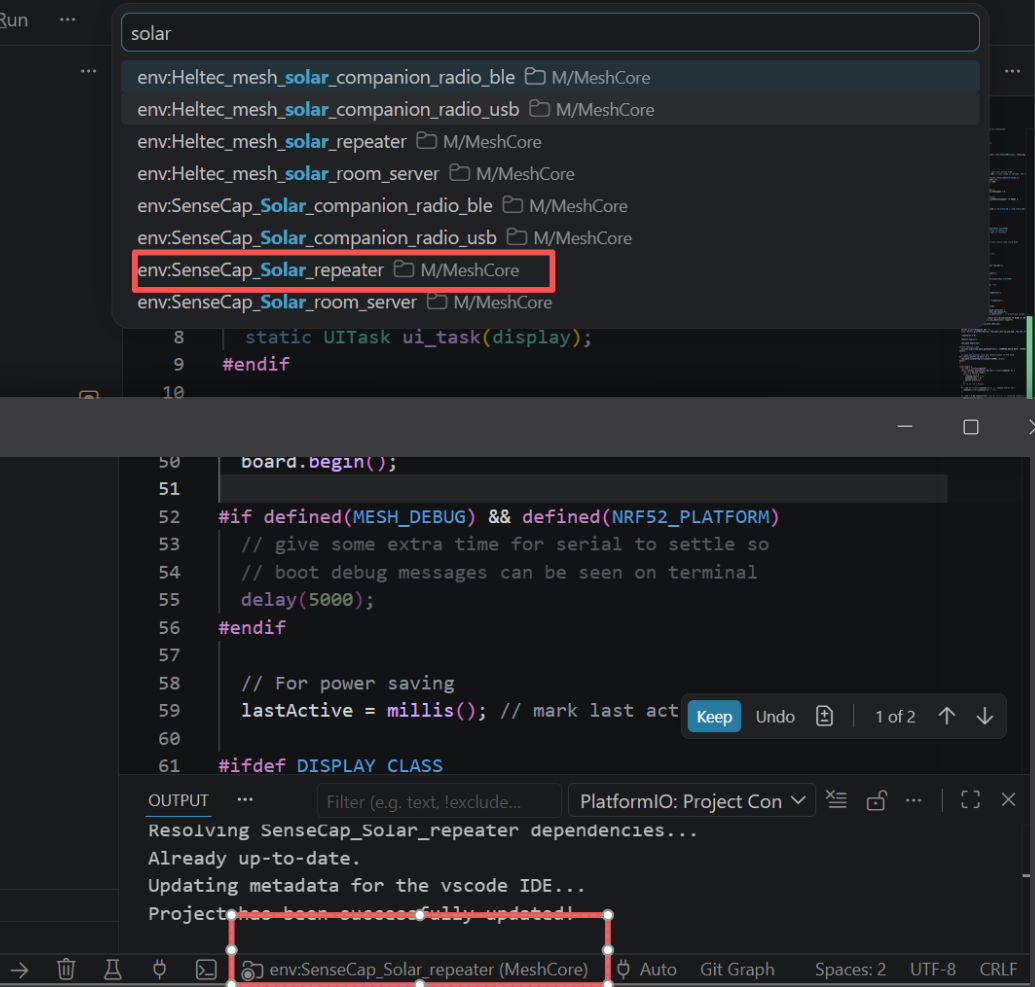
その後、PlatformIO がボードに必要な依存関係を準備します。
コードを変更します。ボードに対応する variant.h ファイルを変更することを推奨します。
コーディングが完了したら、次のコマンドを実行してコードをコンパイルし、uf2 ファイルに変換します。
pio run -e SenseCap_Solar_repeater
pio run -e SenseCap_Solar_repeater -t create_uf2
次に RST ボタンをダブルクリックして DFU モードに入ります。ポップアップしたディスクに uf2 ファイルをドラッグします。uf2 ファイルは .pio\build\SenseCap_Solar_repeater にあります。
例
ユーザー LED 制御
この例では、ユーザー LED の点滅ループを書く方法を示します。次のコードを /examples/simple_repeater/main.cpp にコピーします。
#endif
#ifdef LED_WHITE
static void updateUserLightBlink() {
static unsigned long lastLedPhaseChangeAt = 0;
static bool lightIsOn = true;
const unsigned long now = millis();
if ((unsigned long)(now - lastLedPhaseChangeAt) >= 5000) {
lightIsOn = !lightIsOn;
lastLedPhaseChangeAt = now;
}
digitalWrite(LED_WHITE, lightIsOn ? LED_STATE_ON : !LED_STATE_ON);
}
そして、ループ部分を次のように記述します:
#ifdef LED_WHITE
updateUserLightBlink();
#endif
コンパイルして、生成された uf2 ファイルを Solar Node にフラッシュします。
(上級)PR 提出
MeshCore プロジェクトへの貢献を検討していただきありがとうございます!どのように貢献できるでしょうか? 1. バグ報告
- Issues トラッカーを使用する
- わかりやすいタイトルを付ける(例:"Crash when calling begin() with invalid pin")
- 再現するための手順を正確に記述する
- 使用しているボード、IDE バージョン、ライブラリバージョン、および関連するコードスニペットを記載する
- 可能であれば、最小限かつ完全なサンプルスケッチを添付する
2. 機能改善 / 新機能の提案
- [Feature request] のプレフィックスを付けて issue を作成する
- ユースケースを説明する → どのような問題を解決できるのか?
- 理想的な API / 動作を記述する(コード例があると非常に役立ちます) 3. コード変更の提出(Pull Request)
小さな修正
(誤字、コメント、サンプル、軽微なバグ修正) → 事前に issue を立てる必要はなく、そのまま pull request を作成してください
大きな変更 / 新機能
- まず issue を立ててアイデアを議論する
- メンテナからおおまかな 👍 をもらう
- 'dev' ブランチからリポジトリを fork し、自分のブランチ(fix/xxx, feature/yyy, docs/whatever)を作成する
- 変更を加える
- 必要に応じてサンプルを更新または追加する
- コード内のコメントを追加・更新する
- Pull Request を送信する
Pull Request ガイドライン
- 1 つの機能 / 修正につき 1 つの pull request(小さい PR の方がレビューしやすく、早く終わります)
- 説明的なコミットメッセージを使用する 良い例: Fix I2C timeout handling on ESP32 悪い例: update
- 関連する issue があれば参照する(Fixes #123, Closes #89 など)
- 公開 API を変更した場合は、README.md と library.properties を更新する
- 新機能には examples/ 内のサンプルスケッチを含めること
コーディングスタイル
.clang-format に従い、既存の C++ スタイルを守ってください
- インデントはスペース 2 つ(タブは禁止)
- 関数や変数は camelCase
- クラス名は UpperCamelCase / PascalCase
- #define の定数はすべて ALL_CAPS
- 可能な範囲で 1 行をおおよそ 100 文字未満に保つ (ただし、厳密なルールよりも既存コードとの一貫性を優先します)