Meshtastic ファームウェア ソースコード実践チュートリアル
このチュートリアルでは、Windows と macOS 上での基本的な Meshtastic ファームウェアのワークフローを扱います。リポジトリのクローン、seeed_wio_tracker_L1 のビルド、簡単な UI 変更、そして結果の書き込みまでを行います。
すでに Git、Python、PlatformIO がインストールされている場合は、ハンズオンのセクションまでスキップしてかまいません。
このドキュメントでは、Windows と macOS の両方向けにコマンドを示します。スクリーンショットは主に Windows ですが、ワークフローは macOS でも同じです。
事前準備
次のツールを準備してください:
- Git
- Python 3
- VS Code
- PlatformIO
1. Git をインストールする
- Windows
- macOS
公式の Git for Windows ダウンロードページを開きます:
ページを開くと、通常は自動的にインストーラのダウンロードが始まります。ダウンロードが完了したら、インストーラをダブルクリックしてセットアップウィザードに従います。
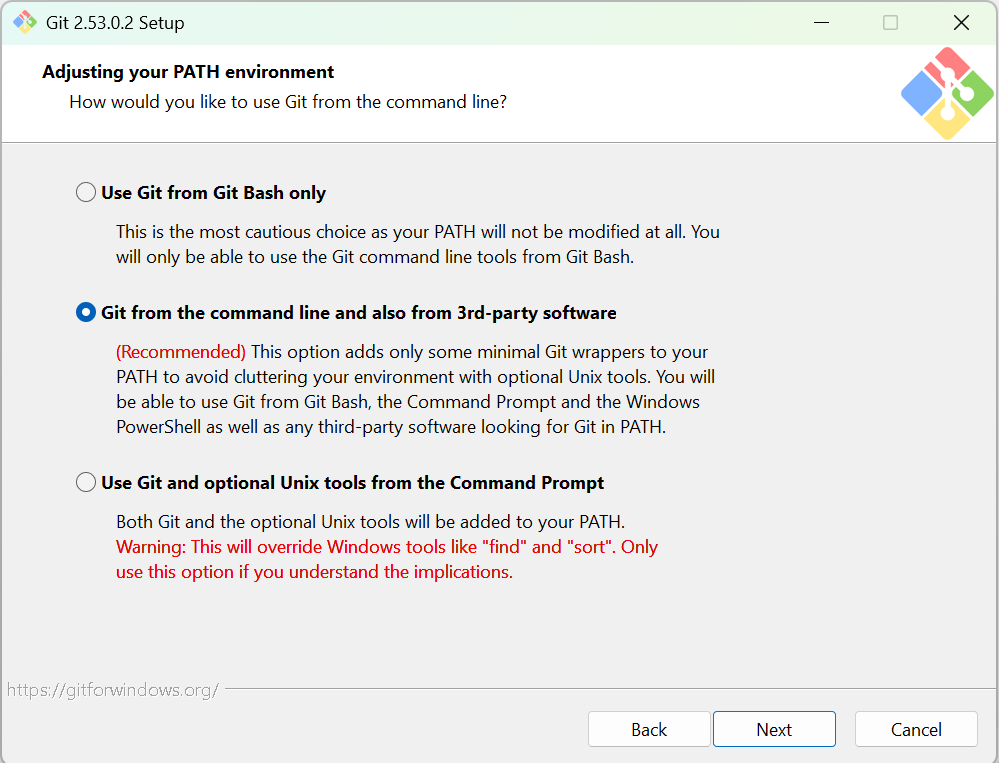
インストール中で最も重要なステップは PATH 環境変数の調整 です。次を選択してください:
Git from the command line and also from 3rd-party software
それ以外のオプションは、通常はデフォルトのままで問題ありません。そのまま Next をクリックして進めてください。
インストールが完了するまで待ちます。
インストール後、現在開いている PowerShell と VS Code のターミナルウィンドウをすべて閉じてから 新しく PowerShell を開き、次を実行します:
& "C:\Program Files\Git\cmd\git.exe" --version

Git のバージョン番号が表示されれば、Git は正しくインストールされています。
それでも git コマンドが使えない場合
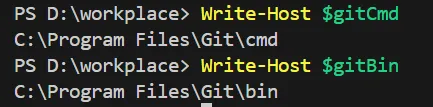
まず、PowerShell で次のコマンドを実行して、Git のデフォルトのインストールパスを確認できます:
$gitCmd = "C:\Program Files\Git\cmd"
$gitBin = "C:\Program Files\Git\bin"
Write-Host $gitCmd
Write-Host $gitBin
そのうえで、手動で Git をシステム環境変数に追加します。
GUI での修正手順
Winキーを押す- 「Edit the system environment variables」を検索する
- 開いて Environment Variables をクリックする
- System variables の中から
Pathを探す - Edit をクリックする
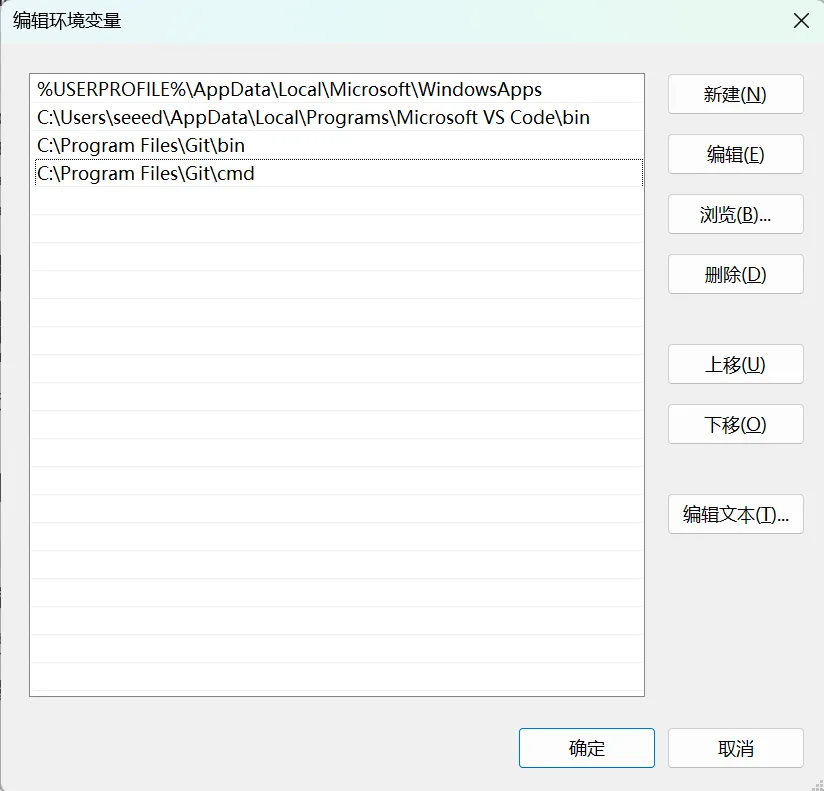
- New をクリックして、次の 2 つのパスを追加する:
C:\Program Files\Git\cmd
C:\Program Files\Git\bin
- 最後まで OK をクリックして保存する
保存後、次の操作も行う必要があります:
- すべての PowerShell ウィンドウを すべて 閉じる
- PowerShell を再度開く
そのあと、次を実行します:
git --version
バージョン番号が表示されれば、インストールは完了です。
macOS では、Git をインストールする方法はいくつかありますが、通常は Homebrew を使うのが最も簡単です:
- まず Command Line Tools をインストールします:
xcode-select --install
- Homebrew がまだインストールされていない場合は、先にインストールします:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
- Git をインストールします:
brew install git
- インストールされたバージョンを確認します:
git --version
すでにターミナルで有効な Git のバージョンが返ってくる場合は、改めてインストールする必要はありません。
Git のユーザー情報を設定する
次に、Git のユーザー情報を設定します。サンプルの値を、自分の名前とメールアドレスに置き換えてください:
git config --global user.name "your name"
git config --global user.email "your [email protected]"
そのあと、次を実行します:
git config --global --list
設定が反映されていることを確認します。
2. Python 3 をインストールする
コマンドラインから Python をインストールする
- Windows
- macOS
ターミナルで次のコマンドを実行します:
winget search --id Python.Python.3.13 --source winget
winget install -e --id Python.Python.3.13 --source winget
最初のコマンドで Python が見つかる場合は、通常 2 つ目のコマンドでそのままインストールできます。
インストール後、ターミナルを閉じて開き直し、次を実行します:
python --version
pip --version

バージョン番号が表示されれば、Python と pip の準備は完了です。
macOS には、すでに Python 環境が含まれていることがよくあります。新しいバージョンをインストールする前に、python3 と pip3 がすでに利用可能かどうかを確認してください:
python3 --version
pip3 --version
利用できない場合、またはより新しいバージョンを使いたい場合は、Homebrew で Python をインストールします:
brew install python
インストール後、ターミナルを再度開き、次を実行します:
python3 --version
pip3 --version
もし python と pip を使いたい場合は、自分でシェルのエイリアスを設定することもできます。ただし macOS では、python3 と pip3 を使う方が一般的に信頼性が高いです。
3. PlatformIO をインストールする
PlatformIO はインストール時に依存関係を自動でダウンロードするため、このステップには時間がかかる場合があります。エラーが発生した場合は、1 つずつ内容を確認してください。
VS Code の拡張機能マーケットプレイスで PlatformIO を検索し、インストールします。
インストール後、左側のツールバーにアリの形をしたアイコンが表示されるはずです。
4. Meshtastic ファームウェアリポジトリをクローンする
Meshtastic 公式のファームウェアリポジトリは meshtastic/firmware です。
- Windows
- macOS
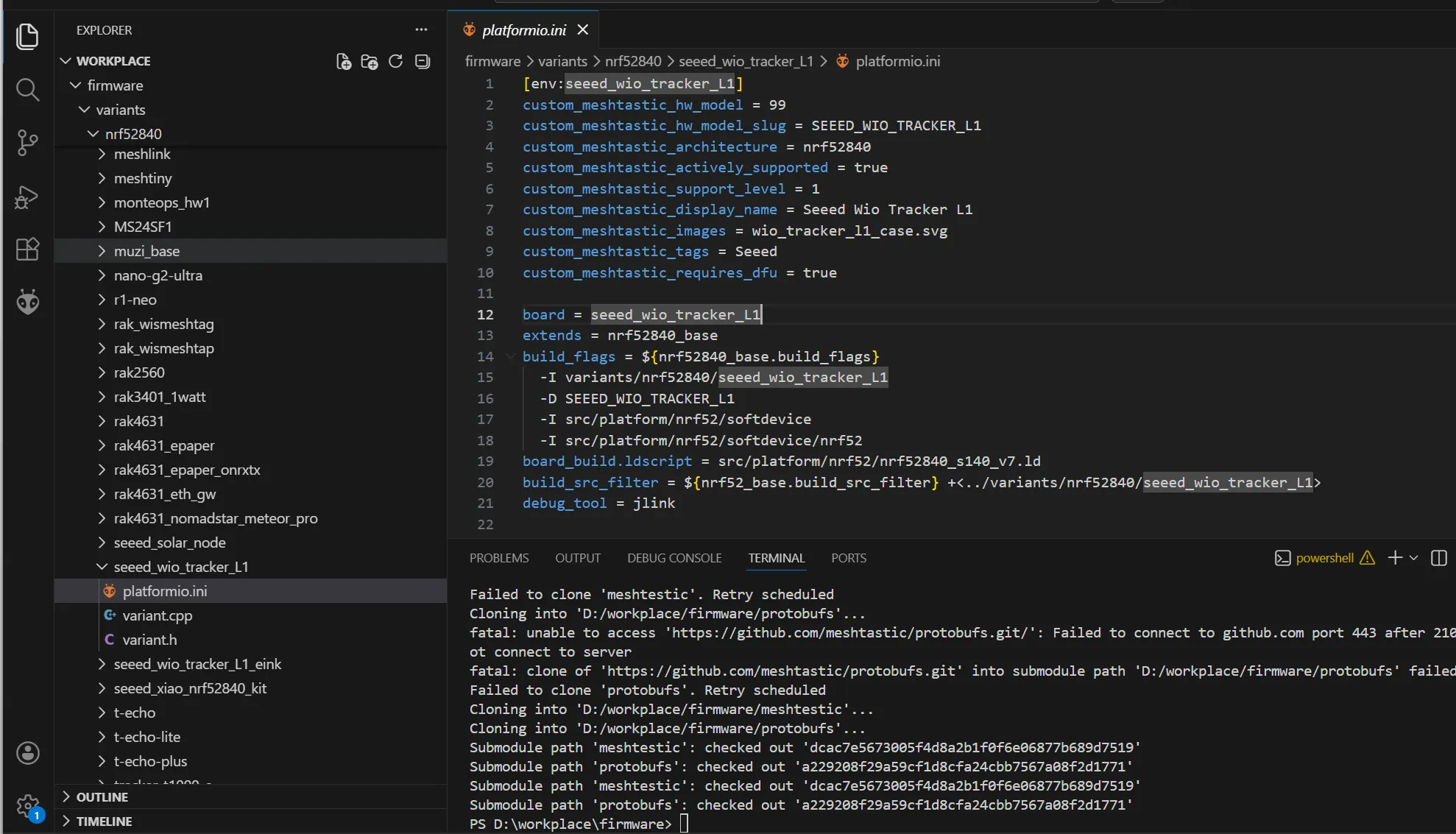
作業ディレクトリのターミナルで、次のコマンドを実行します:
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
プロジェクトディレクトリが別のドライブやパスにある場合は、先にその場所へ移動してください。


出力が上のスクリーンショットと同様であれば、リポジトリは正常にクローンされています。
作業ディレクトリのターミナルで、次のコマンドを実行します:
cd ~/workplace
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
もし ~/workplace がまだ存在しない場合は、先に作成してください:
mkdir -p ~/workplace
コマンドが問題なく完了すれば、リポジトリは正常にクローンされています。
5. ハンズオン
この段階では、まだコードの編集を急がないでください。まず、プロジェクトが一通りのビルドプロセスを正常に通過できることを確認します。
次の 3 つの作業から始めることをおすすめします:
firmwareを開くplatformio.iniを確認する- 対象ボードのビルド環境を見つける
1 つ重要なポイントとして、ルートの platformio.ini だけに注目しないでください。実際には、次のような追加設定ファイルを include しています:
extra_configs =
variants/*/*.ini
variants/*/*/platformio.ini
variants/*/diy/*/platformio.ini
つまり、実際のボードレベルの環境定義は、通常 variants/.../platformio.ini 配下にあります。
ターゲットボードを特定する際は、特に次の 2 つのディレクトリに注意してください:
variants/boards/
ここでは、例として Wio Tracker L1 Pro をターゲットにします。
これにより、Meshtastic において Wio Tracker L1 / L1 Pro のビルドターゲットが seeed_wio_tracker_L1 であることがわかります。
ステップ 1: プロジェクトが正常にビルドできることを確認する
ここではビルドに PlatformIO Core の CLI を使用します。
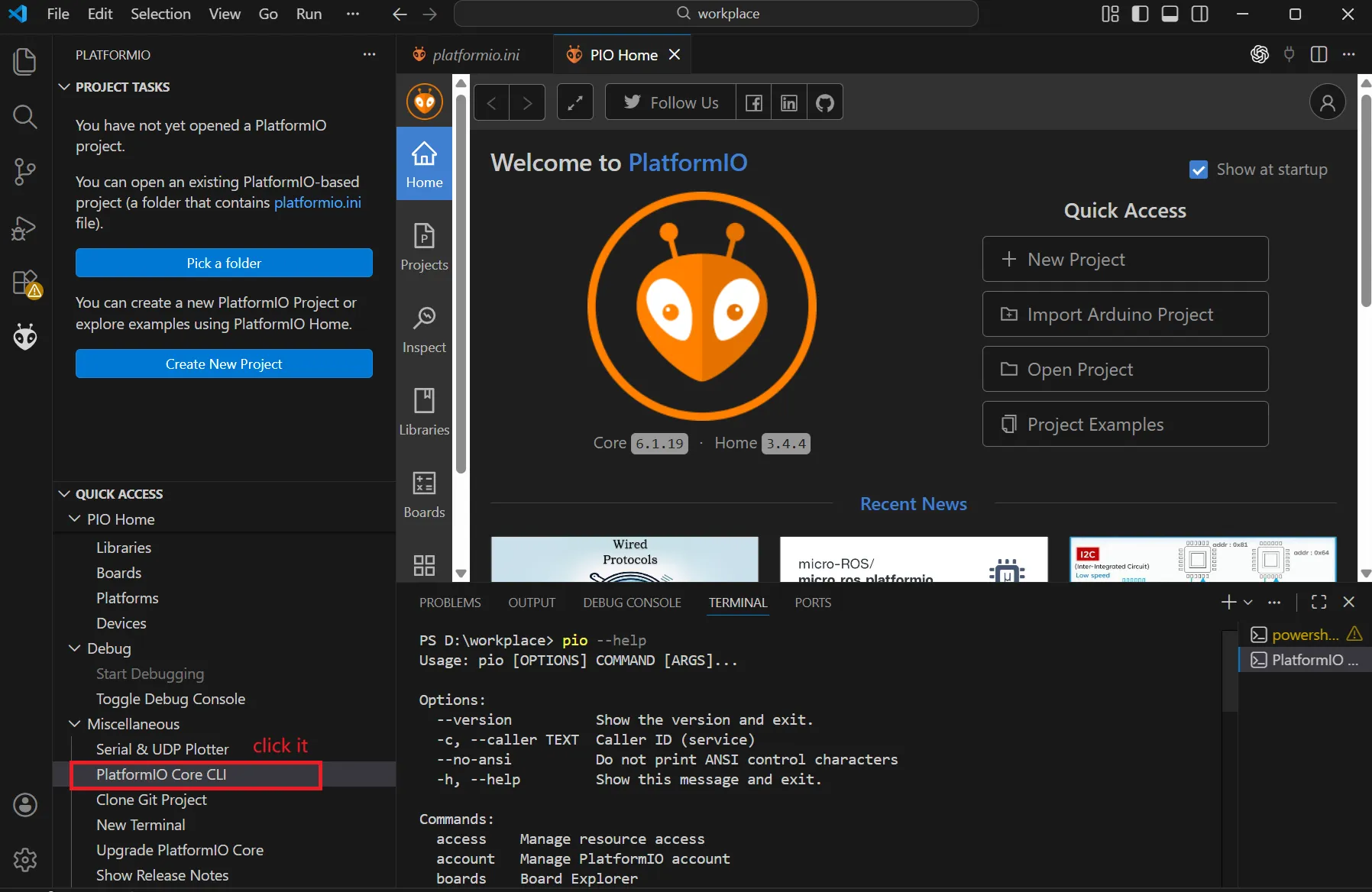
最初のビルドでは、次のコマンドを実行することをおすすめします:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1

画面が上のスクリーンショットと同様であれば、ビルドプロセスは正しく開始されています。初回ビルドは時間がかかることが多いので、気長に待ってください。
ビルドが失敗した場合
ビルドに失敗したときは、まず PlatformIO に現在の環境に必要な依存関係をインストールさせることができます:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio pkg install -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio pkg install -e seeed_wio_tracker_L1
この方法には、次のような利点があります:
- 依存関係だけをインストールし、すぐにフルビルドを開始しない。
- どのパッケージが問題を引き起こしているかを確認しやすい。
- エラーメッセージがより絞られ、原因の切り分けがしやすい。
依存関係のインストールが完了したら、次を実行します:
- Windows
- macOS
pio run -e seeed_wio_tracker_L1 -v
pio run -e seeed_wio_tracker_L1 -v
依存関係のインストールが完了したら、通常のビルドをもう一度実行します:
- Windows
- macOS
pio run -e seeed_wio_tracker_L1
pio run -e seeed_wio_tracker_L1
この時点でビルドが通れば、ファームウェアの出力は正常に生成されています。
ステップ 2:コードを変更する
実践 1:UI 表示を変更する
まずボードレベルの設定から表示の実装をたどっていきます。最初に次を確認できます:
variants/nrf52840/seeed_wio_tracker_L1/platformio.inivariants/nrf52840/seeed_wio_tracker_L1/variant.h
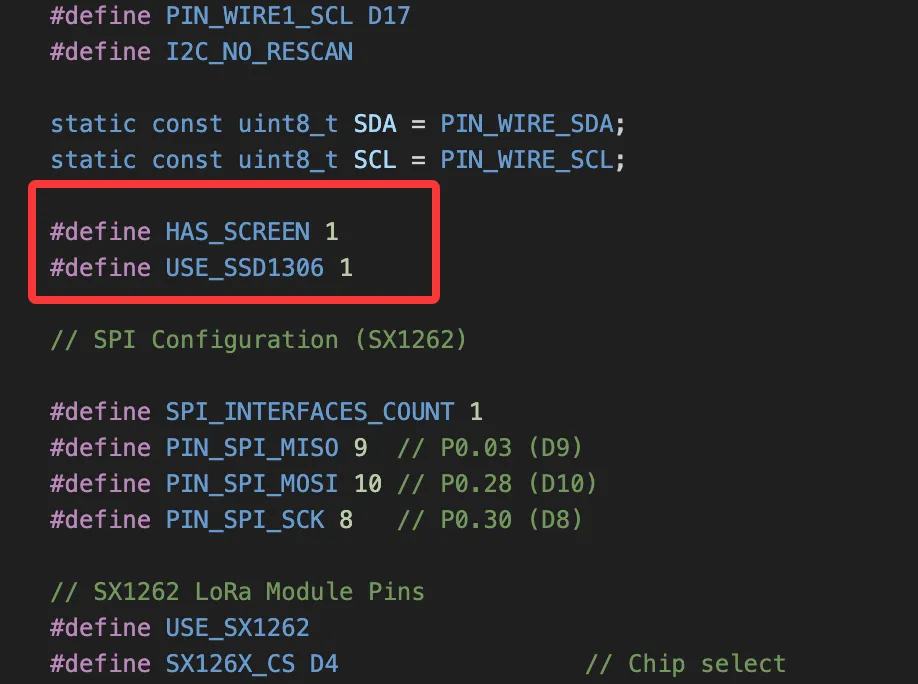
これらの設定ファイルから、L1 は HAS_SCREEN と USE_SSD1306 を定義していることが分かります。つまり、スクリーンなしの構成でも E-Ink ソリューションでもなく、標準的な OLED ディスプレイパイプラインを使用しているということです。
さらに表示ロジックを追っていくと、関連コードのほとんどは次の場所にあります:
src/graphics/src/graphics/draw/
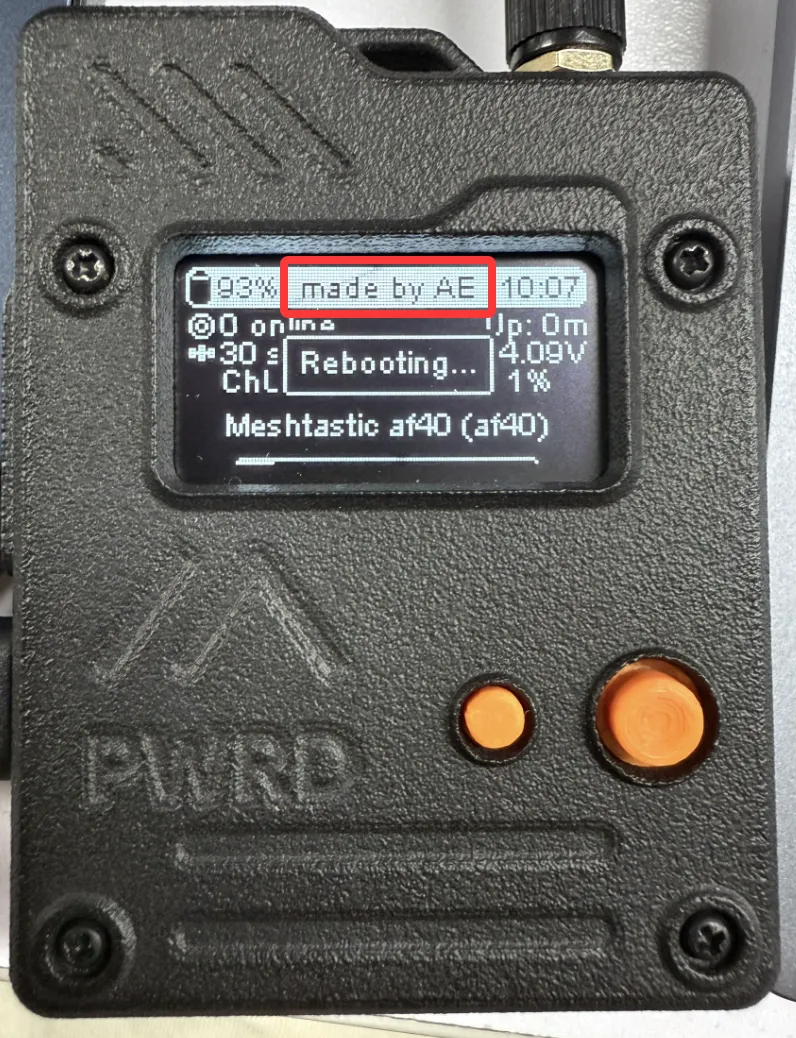
ここでは簡単な例として、ホーム画面のヘッダーにカスタムラベルを追加してみます。
次の変更を加えて src/graphics/SharedUIDisplay.cpp を更新します:
// Track the end of the battery text
int batteryX = 1;
int batteryY = HEADER_OFFSET_Y + 1;
int batteryTextEndX = batteryX - 1;
// Update the boundary while drawing the battery percentage
if (chargePercent != 101) {
char chargeStr[4];
snprintf(chargeStr, sizeof(chargeStr), "%d", chargePercent);
int chargeNumWidth = display->getStringWidth(chargeStr);
int percentWidth = display->getStringWidth("%");
display->drawString(batteryX, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth - 1, textY, "%");
if (isBold) {
display->drawString(batteryX + 1, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth, textY, "%");
}
batteryTextEndX = batteryX + chargeNumWidth + percentWidth - 1 + (isBold ? 1 : 0);
} else {
batteryTextEndX = batteryX - 1;
}
// In the branch that displays time
int iconRightEdge = timeX - 2;
int headerLabelRight = timeX - 4;
#if defined(SEEED_WIO_TRACKER_L1) && !defined(SEEED_WIO_TRACKER_L1_EINK)
if (titleStr && titleStr[0] == '\0') {
static const char *yclLabel = "made by AE";
int labelWidth = display->getStringWidth(yclLabel);
int labelLeft = batteryTextEndX + 4;
if (labelLeft + labelWidth <= headerLabelRight) {
int labelX = labelLeft + ((headerLabelRight - labelLeft) - labelWidth) / 2;
display->drawString(labelX, textY, yclLabel);
if (isBold)
display->drawString(labelX + 1, textY, yclLabel);
}
}
#endif
// In the branch that does not display time
int iconRightEdge = screenW - xOffset;
int headerLabelRight = screenW - xOffset - 2;
#if defined(SEEED_WIO_TRACKER_L1) && !defined(SEEED_WIO_TRACKER_L1_EINK)
if (titleStr && titleStr[0] == '\0') {
static const char *yclLabel = "made by AE";
int labelWidth = display->getStringWidth(yclLabel);
int labelLeft = batteryTextEndX + 4;
if (labelLeft + labelWidth <= headerLabelRight) {
int labelX = labelLeft + ((headerLabelRight - labelLeft) - labelWidth) / 2;
display->drawString(labelX, textY, yclLabel);
if (isBold)
display->drawString(labelX + 1, textY, yclLabel);
}
}
#endif
この更新は次の 3 つを行います:
- バッテリーテキストの右端を記録します。
- バッテリー領域と右側のアイコンとの間にスペースを確保します。
- タイトルが空のときにのみ、
SEEED_WIO_TRACKER_L1上でmade by AEを描画します。
完全なコードはこちらで確認できます:
ステップ 3:独自のファームウェアをビルドする
変更が終わったら、プロジェクトルートに戻り、同じターゲットを再度ビルドします:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
表示ロジックは変更されましたが、ビルドターゲットは同じままです:
seeed_wio_tracker_L1
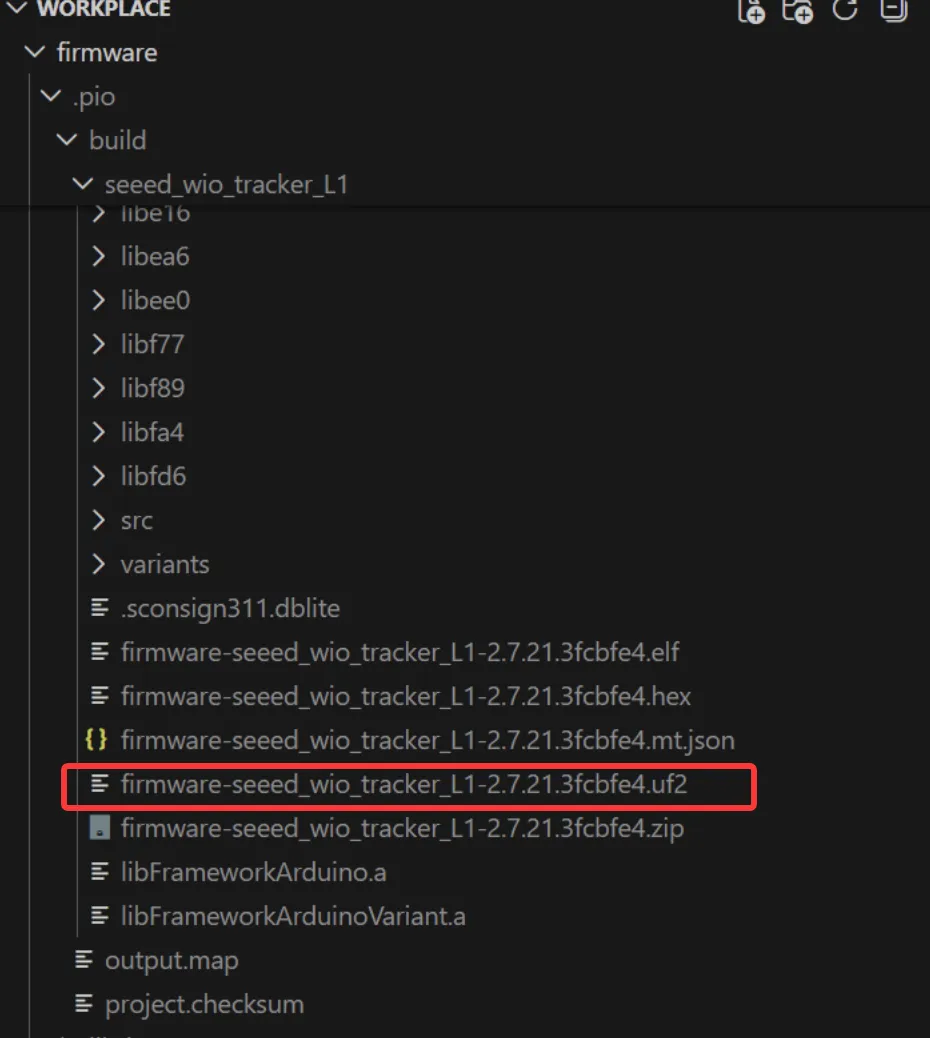
ビルドが成功すると、出力は通常次の場所にあります:
- Windows
- macOS
D:\workplace\firmware\.pio\build\seeed_wio_tracker_L1\
~/workplace/firmware/.pio/build/seeed_wio_tracker_L1/
更新されたことを確認すべきファイルは次のとおりです:
firmware-seeed_wio_tracker_L1-*.uf2
6. ファームウェアを書き込む
ビルドが完了したら、公式の書き込みページを開きます:
ほとんどの場合、まず消去操作を行う必要があります。
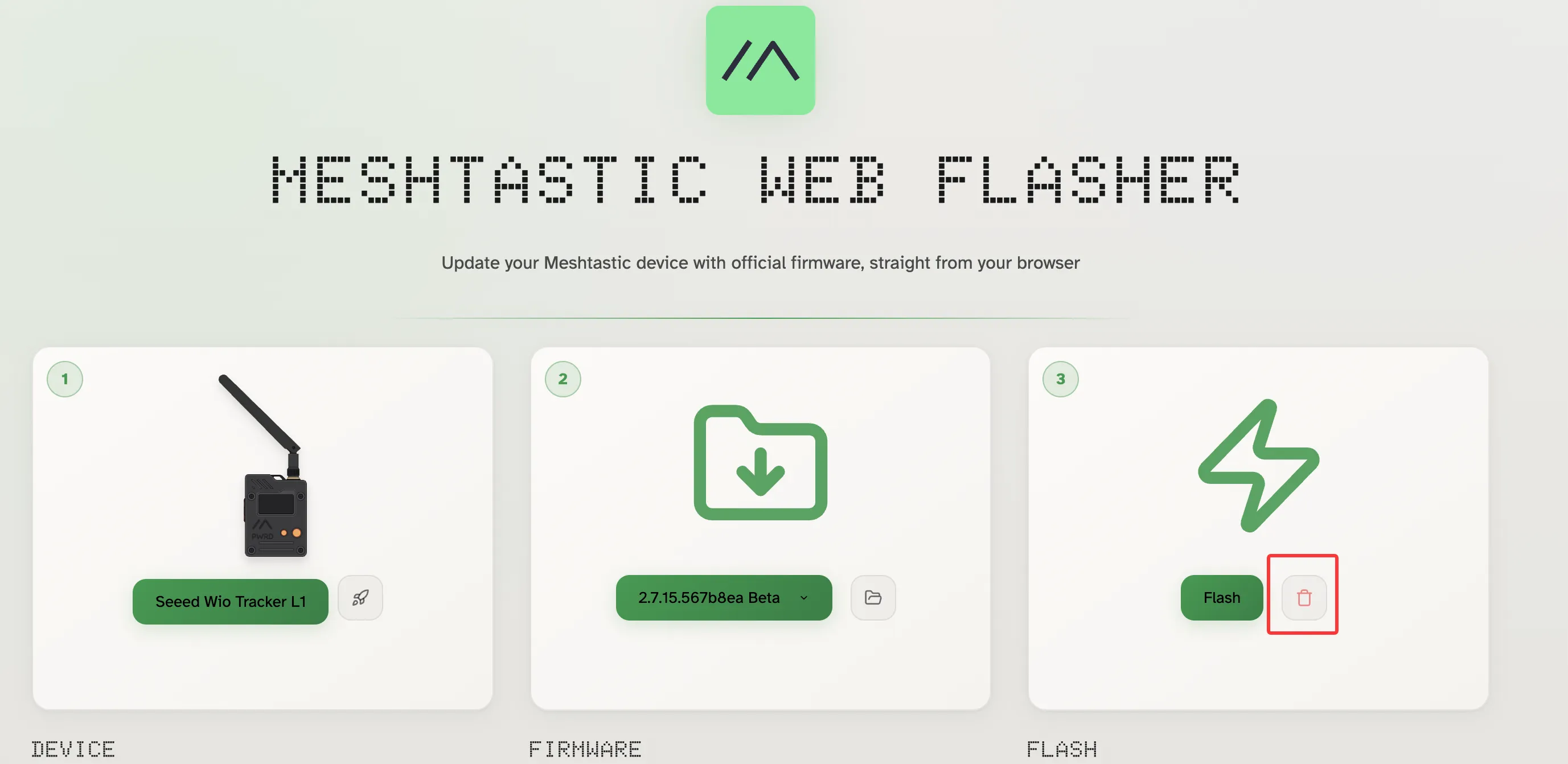
次に、先ほどビルドしたファームウェアファイルを選択し、デバイスに書き込みます。

これで、Meshtastic ソースコードの実践演習は完了です。環境構築、リポジトリのクローン、ボード設定の調査、ファームウェアのコンパイル、表示ロジックの変更、最終的な書き込み検証まで、一連のワークフローを一通り体験しました。
さらに発展させたい場合は、次の方向を引き続き探求できます:
- ホーム画面上の要素をさらに変更する
- ボタン、GPS、Bluetooth およびその他のモジュールの動作を調整する
- 自作ボード用に独立した
variantを追加する src/、variants/、boards/間の関係を引き続き追跡する
よくある問題
git コマンドが使用できない
- Windows では、まず Git が
PATHに追加されているか確認します。 - macOS では、最初に
git --versionを実行します。Command Line Tools のインストールを求められたら、指示に従ってください。
python3 または pip3 が使用できない
- Windows では、Python が
PATHに追加されていることを確認するか、ターミナルを再起動してから再度試してください。 - macOS では、まず
python3/pip3が既に存在するか確認し、必要な場合のみ Homebrew で Python をインストールします。
pio コマンドが使用できない
- まず
pio --versionを実行します。 - それでもコマンドが使用できない場合は、VS Code とターミナルを再起動してから再度試してください。
- 必要に応じて、PlatformIO 拡張機能を再インストールし、PlatformIO Core が正しく初期化されていることを確認します。
git submodule update --init の後でもコードがまだ不完全に見える
- まず、自分が
firmwareリポジトリのルートディレクトリにいることを確認します。 - ネットワーク接続が不安定な場合は、次を使って再試行してください:
git submodule update --init --recursive
最初のビルドに時間がかかりすぎる
- 最初のビルドで多くの依存関係をダウンロードするのは正常です。
- 長時間停止しているように見える場合は、先にパッケージを個別にインストールしてみてください:
pio pkg install -e seeed_wio_tracker_L1
その後、もう一度ビルドを実行します。