reComputerでMID360 LiDARを使用する方法
はじめに
MID360 LIDARセンサーは、様々なアプリケーション向けに高精度の3Dポイントクラウドデータを提供します。このガイドでは、ROS NoeticをランニングしているreComputer J30/40デバイスでMID360をセットアップすることに焦点を当てています。
このwikiは、ROSを使用してreComputer J30/40 JetsonにMID360 LiDARをインストールし、セットアップし、ポイントクラウドデータを可視化するためのステップバイステップガイドを提供します。
前提条件
-
reComputer J30/40シリーズ: チュートリアルに従って、すでにJetPack 5.xシステムのインストールとROS Noetic環境のインストールが完了していること。
-
MID360 LIDAR

はじめに
SDK2のインストール
-
ステップ1: Livox-SDK2をインストール
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j8
sudo make install -
ステップ2: livox_ros_driver2をインストール:
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ~/ws_livox/src/livox_ros_driver2
cd ~/ws_livox/src/livox_ros_driver2
source /opt/ros/noetic/setup.sh
./build.sh ROS1
reComputer IPアドレスの設定
MID360 LiDARのデフォルトIPアドレスは192.168.1.2xxで、ターゲットホストマシンのIPアドレスは192.168.1.50です。ハードウェアを接続した後、reComputerのIPアドレスを手動で設定する必要があります。
-
ステップ1: イーサネット設定を開く。

-
ステップ2: IPv4フィールドで手動設定を選択し、IPアドレス192.168.1.50とマスク255.255.255.0を入力する。

-
ステップ3: 設定パラメータ。 次に、
livox_ros_driver2の~/src/livox_ros_driver2/configファイルを変更します。青い下線部分は静的IPと一致させる必要があります。赤い下線部分は192.168.1.1xxとして設定し、最後の2桁はMID360ブロードキャストコードの最後の2桁に対応させます。例えば、ブロードキャストコードが47MDL1C0010081(14文字)の場合、IPアドレスは192.168.1.181として設定する必要があります。livox_ros_driver2/config/MID360_config.json
livox_ros_driver2/launch_ROS1/rviz_MID360.launch
livox_ros_driver2/launch_ROS1/msg_MID360.launch
Lidarコードの実行
Lidarを開始:
cd ~/ws_livox/
source devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
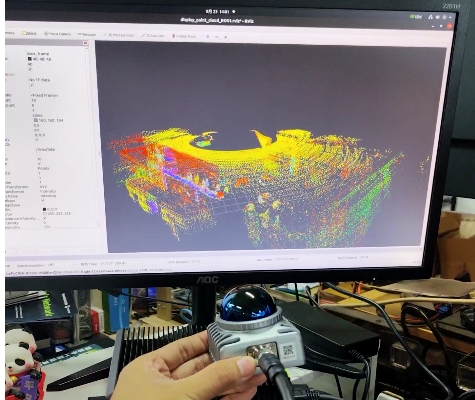
新しいターミナルを開く:
cd ~/ws_livox/
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちの製品での体験ができるだけスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。