Orbbec Gemini2 3D カメラ

コンパクトな Gemini 2 3D カメラは Active Stereo IR 技術をベースとし、高品質な深度処理、IMU、および単一ケーブル USB 3.0 電源 + 接続のための Orbbec の最新カスタム ASIC を搭載しています。広い FOV と広い深度センシング範囲により、Gemini 2 は多くのアプリケーション、特にロボティクスに適応できます。Orbbec SDK で簡単にセットアップ・操作でき、真っ暗闇から半屋外まで、様々な照明条件で極めて正確で信頼性の高いデータを提供します。
特徴
- Active Stereo IR 深度出力にアクティブステレオ IR 技術を採用し、様々な照明条件で正確で信頼性の高いデータ出力を実現
- 広いセンシング範囲 0.15m から 10m まで高品質な深度データ出力を提供
- 広い FOV 水平 91 度、垂直 66 度の広い視野データを提供
- マルチカメラ同期 深度画像と RGB 画像の両方でマルチカメラ同期をサポート
- USB 接続 電源と接続に単一の USB 3.0 Type-C ケーブルを使用
仕様
| パラメータ | 詳細 |
| 電圧 | 5V (USB Type-C) |
| 深度技術 | Active Stereo IR |
| 動作温度 | 0°C ~ 40°C |
| 機械的寸法 | 90mm x 25mm x 30mm |
| 通信インターフェース | USB 3.0 Type-C |
| カメラドライバ | UVC |
| 深度範囲 | 0.15m ~ 10m |
| 理想的範囲 | 0.2m ~ 5m |
| 深度解像度 | 最大 1280x800 @ 30fps |
| RGB 解像度 | 最大 1920x1080 @ 30fps |
| 水平 FOV | 91° |
| 垂直 FOV | 66° |
ハードウェア概要



Gemini シリーズクイックスタートガイド
-
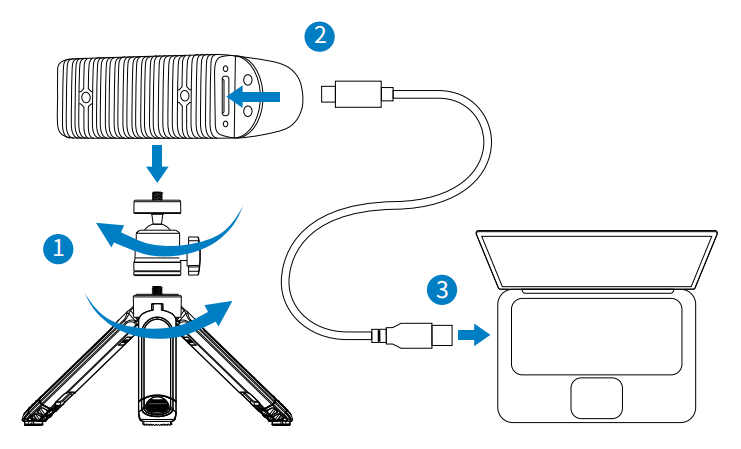
Orbbec カメラの接続 ① 三脚ヘッドを三脚に組み立て、下記ステップ 1 に示すように、組み立てた三脚にカメラを固定します。
② 下記ステップ 2 に示すように、USB-C to USB-A ケーブルを使用してカメラの Type-C ポートに接続します。
③ 下記ステップ 3 に示すように、同じ USB-C to USB-A ケーブルを使用して USB-A コネクタをホストに接続します。
- Orbbec Viewer の取得
お使いのシステムとバージョンに対応する Orbbec Viewer を選択してダウンロードしてください。
- Orbbec Viewer の起動
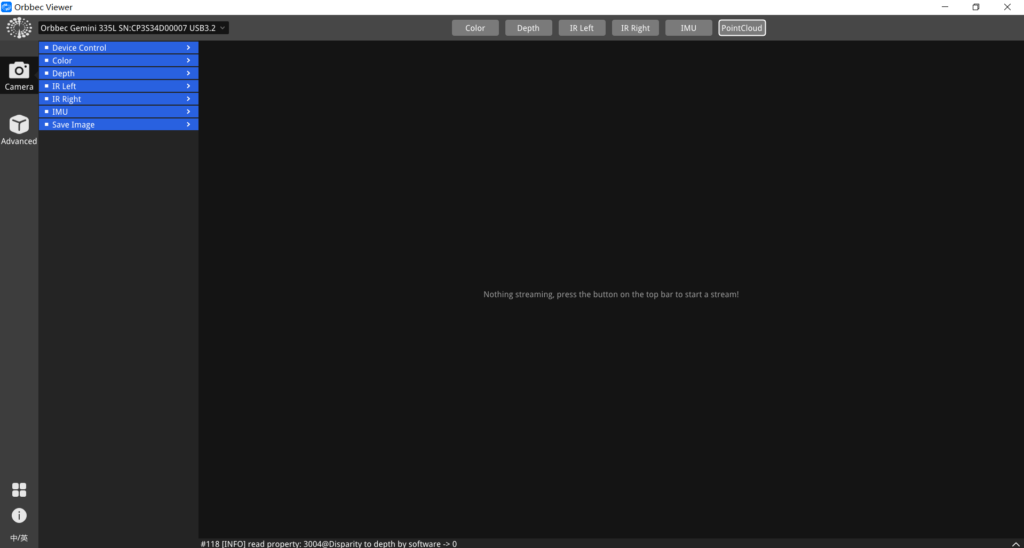
- Orbbec Viewer を起動した後、以下の画像に示すように、ツールが 3D カメラを認識していることを確認してください。 【備考】カメラが認識されない場合は、カメラとホストが正しく接続されていることを確認してください。USB ケーブルを一度抜いて再接続してみてください。それでも認識されない場合は、USB ケーブルの交換や、ホストコンピュータの電源供給が必要な仕様を満たしているかを確認してください。
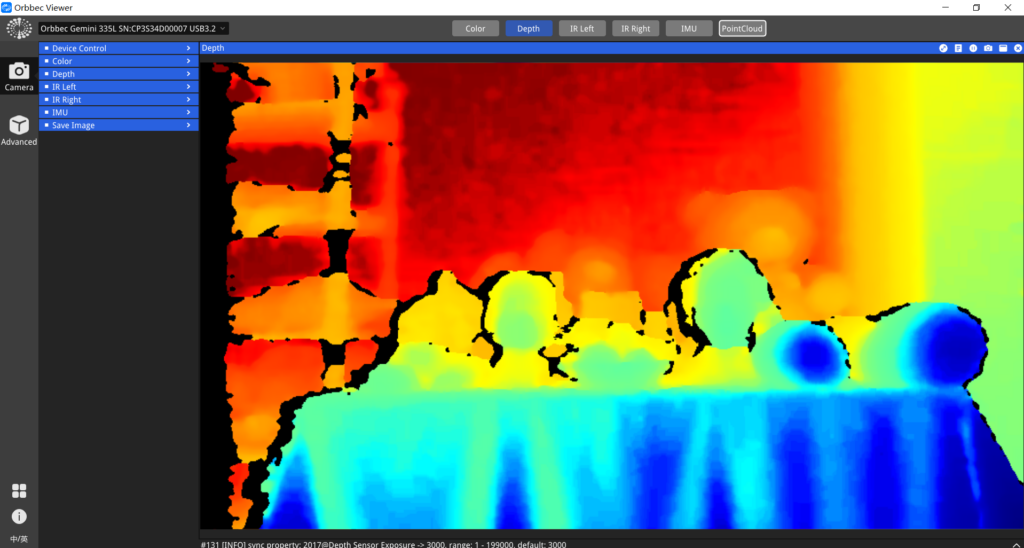
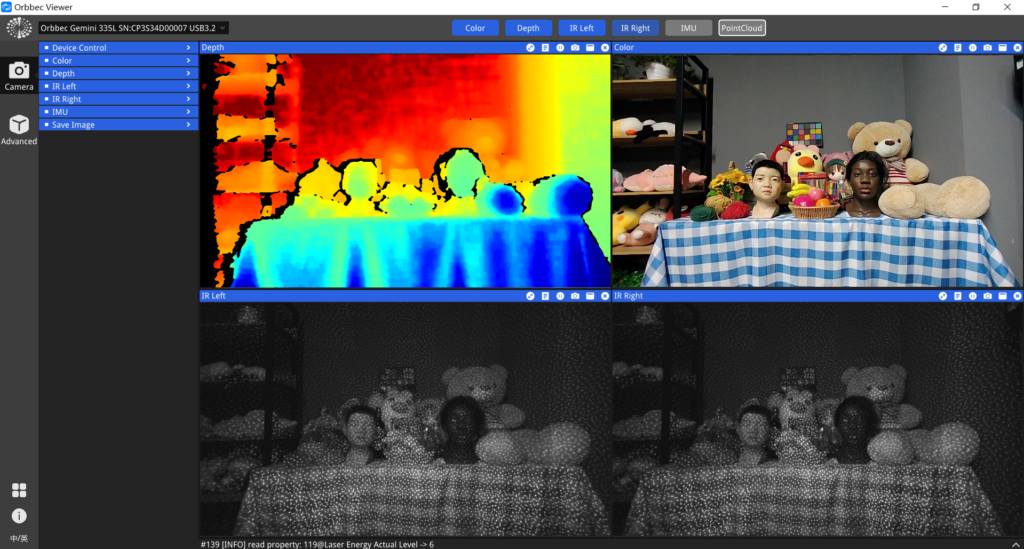
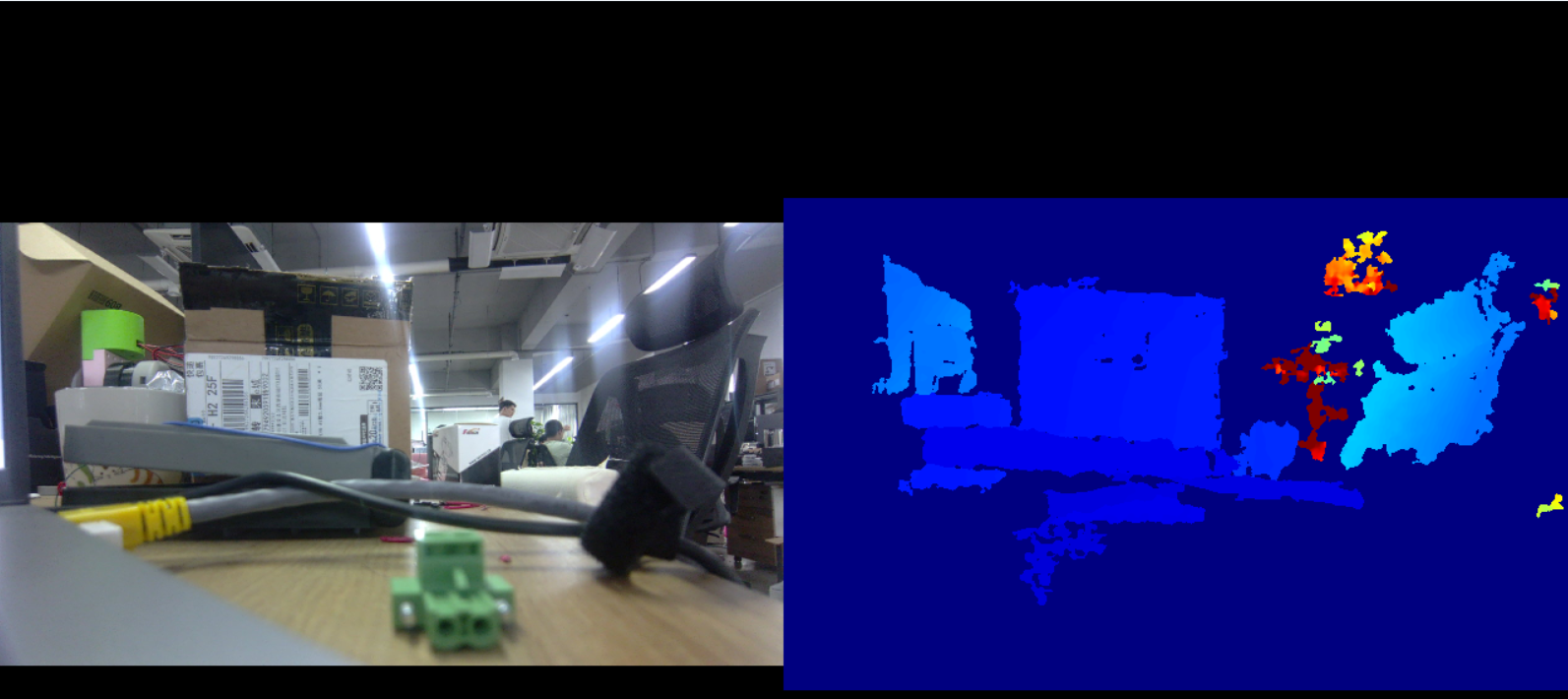
- ツール上部の 'Depth' ボタンを切り替えて、深度ストリームを開始・プレビューします。
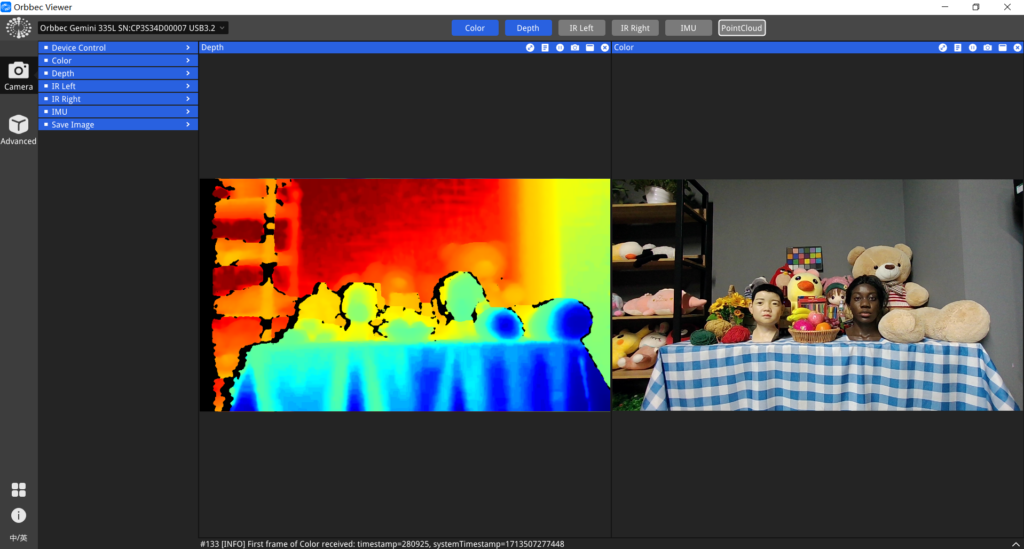
- ツール上部の 'Color' ボタンを切り替えて、カラーストリームを開始・プレビューします。カラーストリームと深度ストリームが並んで表示されます。
- ツール上部の 'IR Left' と 'IR Right' ボタンを切り替えて、IR ストリームを開始・プレビューします。
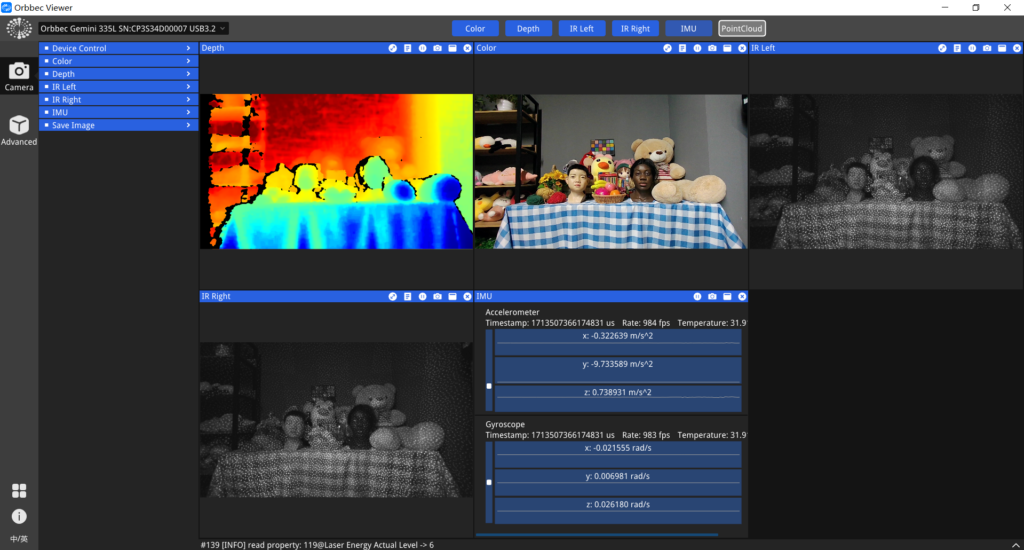
- ツール上部の 'IMU' ボタンを切り替えて、IMU ストリームを開始・プレビューします。
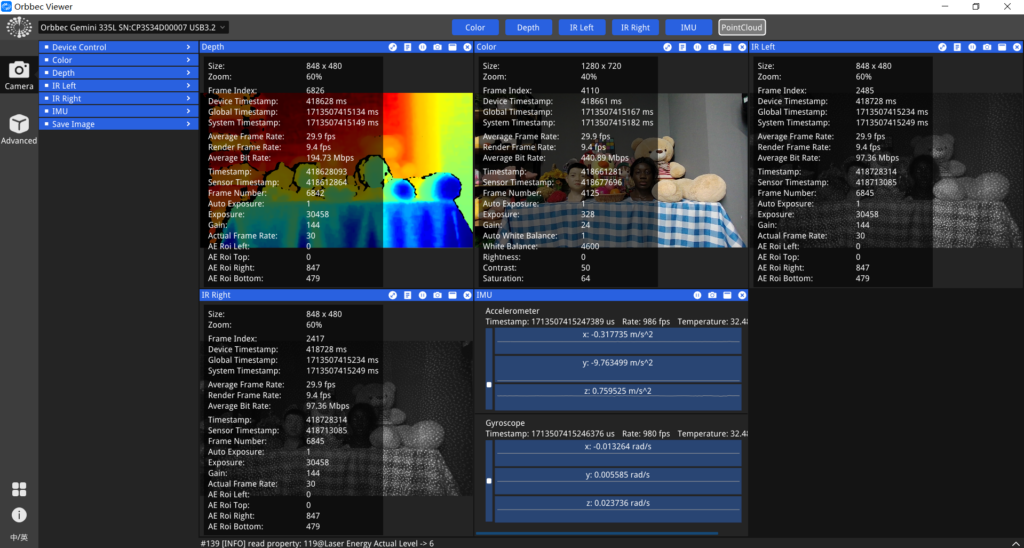
- 各ウィンドウの上部にあるボタンを切り替えて、メタデータ情報を表示します。
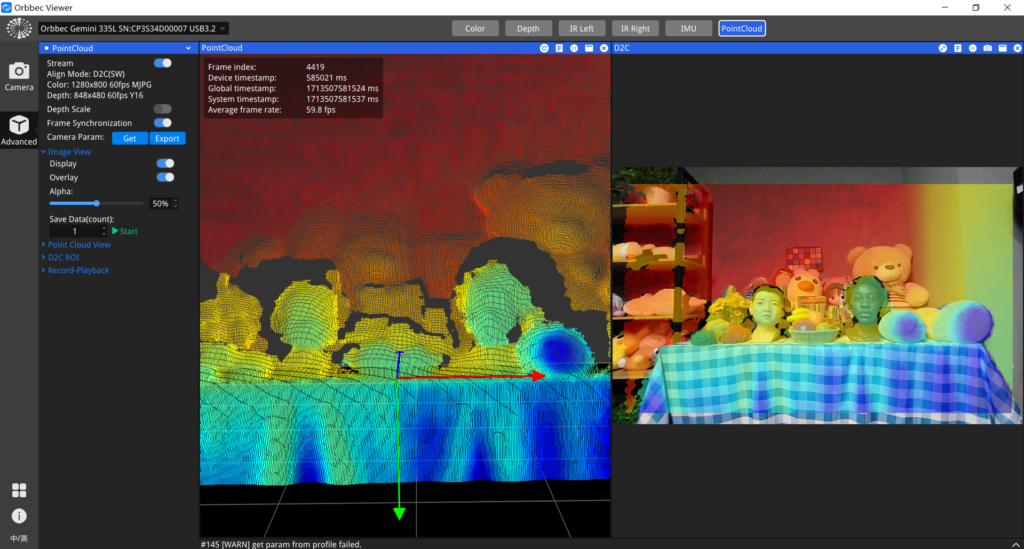
- ツール上部の 'PointCloud' ボタンを切り替えて、3D ポイントクラウドを開始・プレビューします。
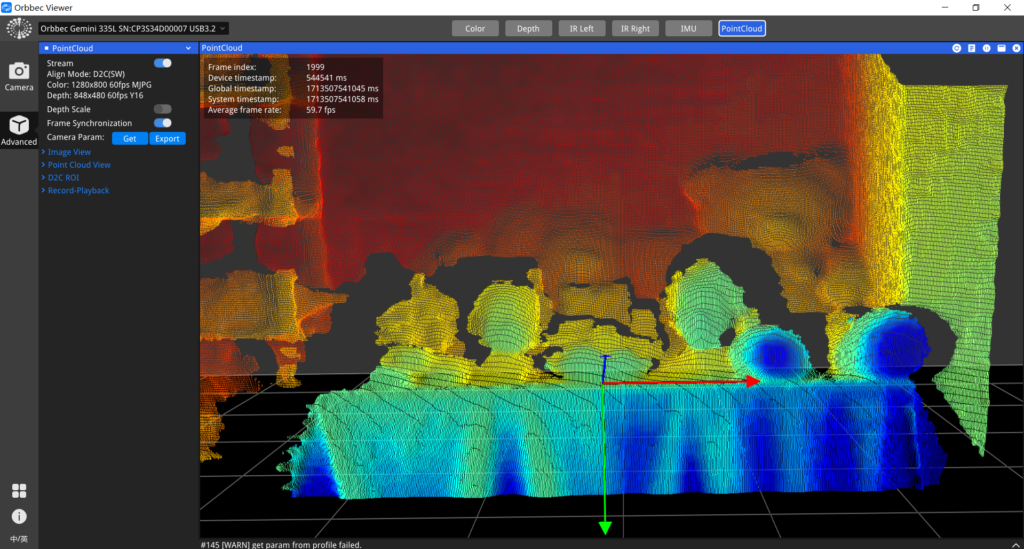
- 左側の 'Image View' メニュー下の 'Display' ボタンを切り替えて、D2C(深度からカラーへの登録)ストリームを開始・プレビューします。3D ポイントクラウドと D2C ストリームが並んで表示されます。
reComputer での開始
ステップ 1. ARM64 アーキテクチャ用の Orbbec SDK をダウンロード・インストールします:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
ステップ 2. サンプルをビルドしてテストします:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
アプリケーション例
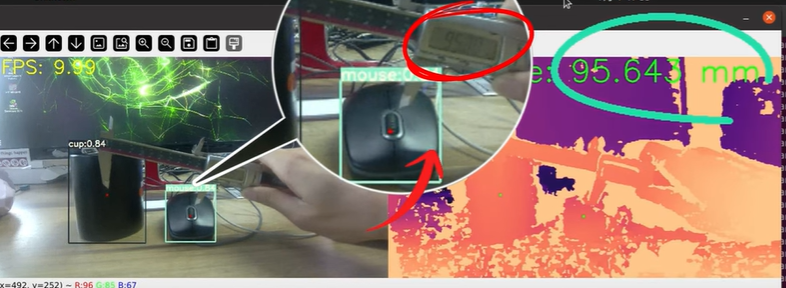
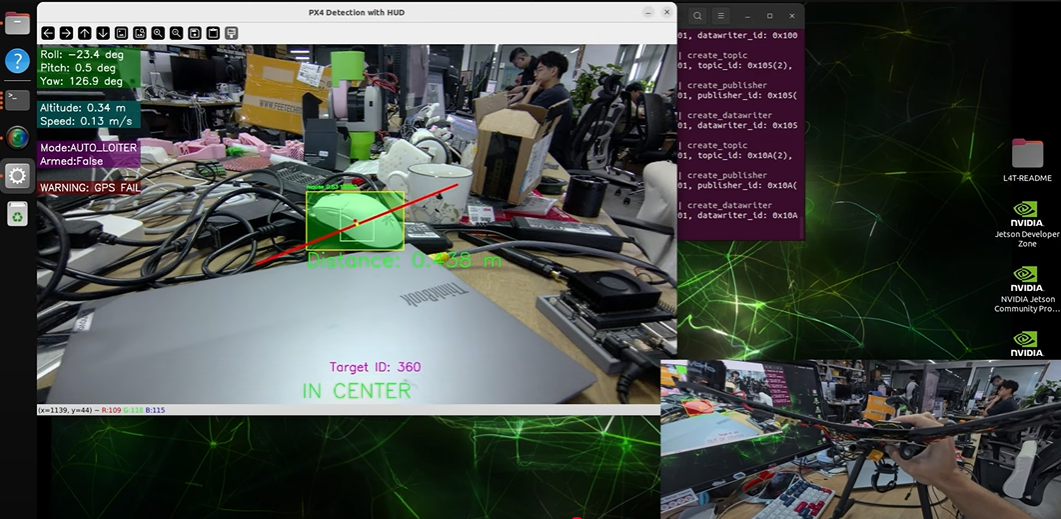
Orbbec Gemini2 は、ロボティクス、3D ビジョン、オブジェクト追跡、産業オートメーションに最適なコンパクトで高性能な深度カメラです。 NVIDIA Jetson プラットフォームなどの組み込み AI やエッジコンピューティングアプリケーションに完璧に適合します。
リソース
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルをご用意しています。