Orbbec Gemini 335Lg ステレオカメラ

Gemini 335Lgは、業界で実績のあるGemini 335LのGMSL2/FAKRAバージョンとして、Gemini 330シリーズの中でも際立ったモデルです。
GMSL2シリアライザーとFAKRAコネクタの組み合わせにより、複雑な環境をナビゲートする自律移動ロボット(AMR)や柔軟なケーブル配線が必要なロボットアームに対して、安全で信頼性の高い接続を確保します。
仕様
| カテゴリ | 仕様 | Gemini 335Lg |
|---|---|---|
| 基本 | 使用環境 | 屋内・屋外 |
| テクノロジー | アクティブ/パッシブステレオ | |
| ベースライン | 95mm | |
| データ接続 | GMSL2 FAKRA と USB 3 | |
| カメラプロトコル | USB と GMSL 2 | |
| UVC 準拠 | はい | |
| SDK | Orbbec SDK | |
| 深度 | 深度レンジ [1] | 0.17m - 20m+ |
| 推奨レンジ | 0.25m - 6m | |
| 深度解像度 / フレームレート | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps | |
| 深度 FOV (H × V) | 90° × 65° ± 3° @ 2m | |
| D2C 時の深度 FOV (H × V) | Up to: 90° × 65° ± 3° @ 2m | |
| 空間精度 [2] | ≤0.8% @ 2m; ≤1.6% @ 4m | |
| 深度センサー技術 | グローバルシャッター | |
| 深度フィルタ | 可視+NIR パス | |
| IR | IR 解像度 / フレームレート | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps |
| IR FOV (H × V) | 91° × 65° ± 3° | |
| RGB | RGB 解像度 / フレームレート | Up to 1280 × 800 @ 60 FPS; 1280 × 720 @ 60 FPS |
| RGB センサー FOV (H × V) | 94° × 68° ± 3° | |
| RGB センサー技術 | グローバルシャッター | |
| 内蔵センサー | IMU | 対応 |
| 電気特性 | 消費電力 | GMSL2: Average ≤ 3.8 W (Peak ≤ 7.5W); USB3: Average ≤ 3.0 W (Peak ≤ 6W) |
| 電源 | GMSL2: For Best Performance, DC 12V/≥0.7A (Laser Energy Level 6); For Default Performance: DC 12V/≥0.5A [3] (Laser Energy Level 4); USB 3: DC 5V/≥1.5A | |
| 物理特性 | マルチカメラ・ハード同期 | 8-pin & FAKRA-Z |
| 寸法(W × H × D) | 124 mm × 29mm × 36 mm | |
| 重量 | 164g ± 3g | |
| 保護等級 [4] | IP65 | |
| 取り付け | Bottom: 1 × 1/4 - 20 UNC; BACK: 2 × M4 | |
| 環境 | 周囲温度 | -10℃ - 50 ℃ @ 15 FPS; -10℃ - 45 ℃ @ 30/60 FPS |
| EMC 要件 | EN61000-6-2; EN610000-6-4 | |
| 振動 | 3.8Grms @ 5 ~ 500 Hz, random, 2hr/axis | |
| その他 | 寿命 [5] | 5 years |
[1] 理論上の最大深度範囲は65メートル;
[2] 工場校正時に測定されたデータ;
[3] Gemini 335Lgのデフォルトレーザーエネルギーレベルは、ピーク電力消費を削減し、動作不良を防ぐためにレベル4に設定されています。十分な電力が利用可能な場合、ユーザーは手動でレーザーを最大レベル6に調整して最適なパフォーマンスを実現できます;
[4] Gemini 335LおよびGemini 335Lgの両方とも、電源投入時の動作でIP65保護を実現するためにIP65準拠のケーブルの使用が必要です;
[5] 1日あたり16時間以内の動作。
デバイスのセットアップ
このチュートリアルでは、USB 3とGMSL2接続の両方を実演します。ホストデバイスの仕様:
- reComputer Robotics J4012 with GMSL
- JetPack 6.2 (Ubuntu 22.04)
x86_64 Windows/Linux、またはmacOS(x86_64、Apple Siliconの可能性あり)でのチュートリアルについては、SDK RepoのREADMEを参照してください
Orbbec Viewerのダウンロードとインストール
- Jetsonデバイスでターミナルを起動し、GitHubリリースから事前ビルドされたパッケージをダウンロードします。
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecSDK_v2.4.8_arm64.deb
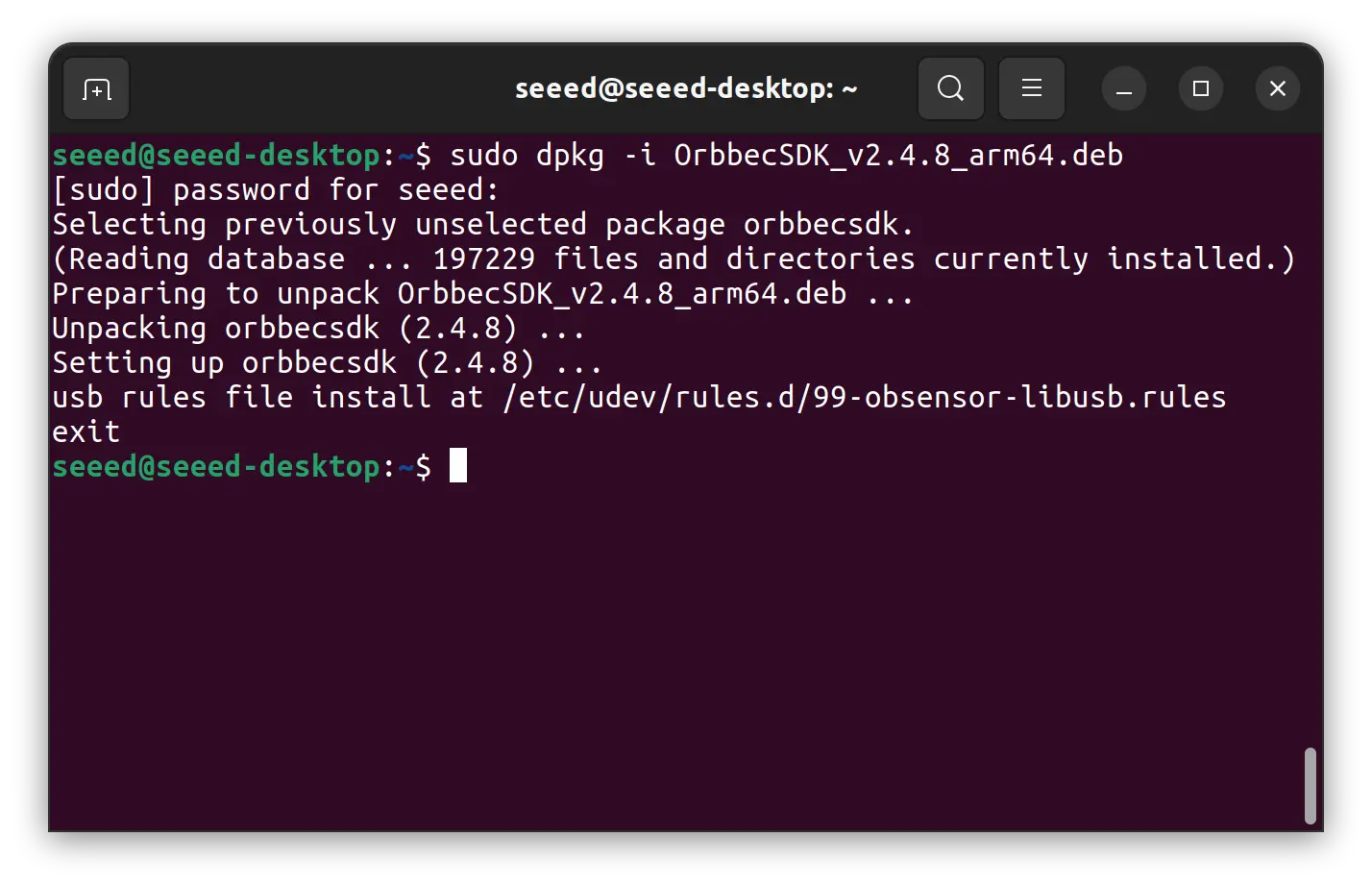
- Install SDK
sudo dpkg -i OrbbecSDK_v2.4.8_arm64.deb
- Orbbec Viewerを使用した可視化、ダウンロード
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
- コンテンツを展開する
# In case you haven't install 'unzip'
# sudo apt-get update && sudo apt-get install unzip
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
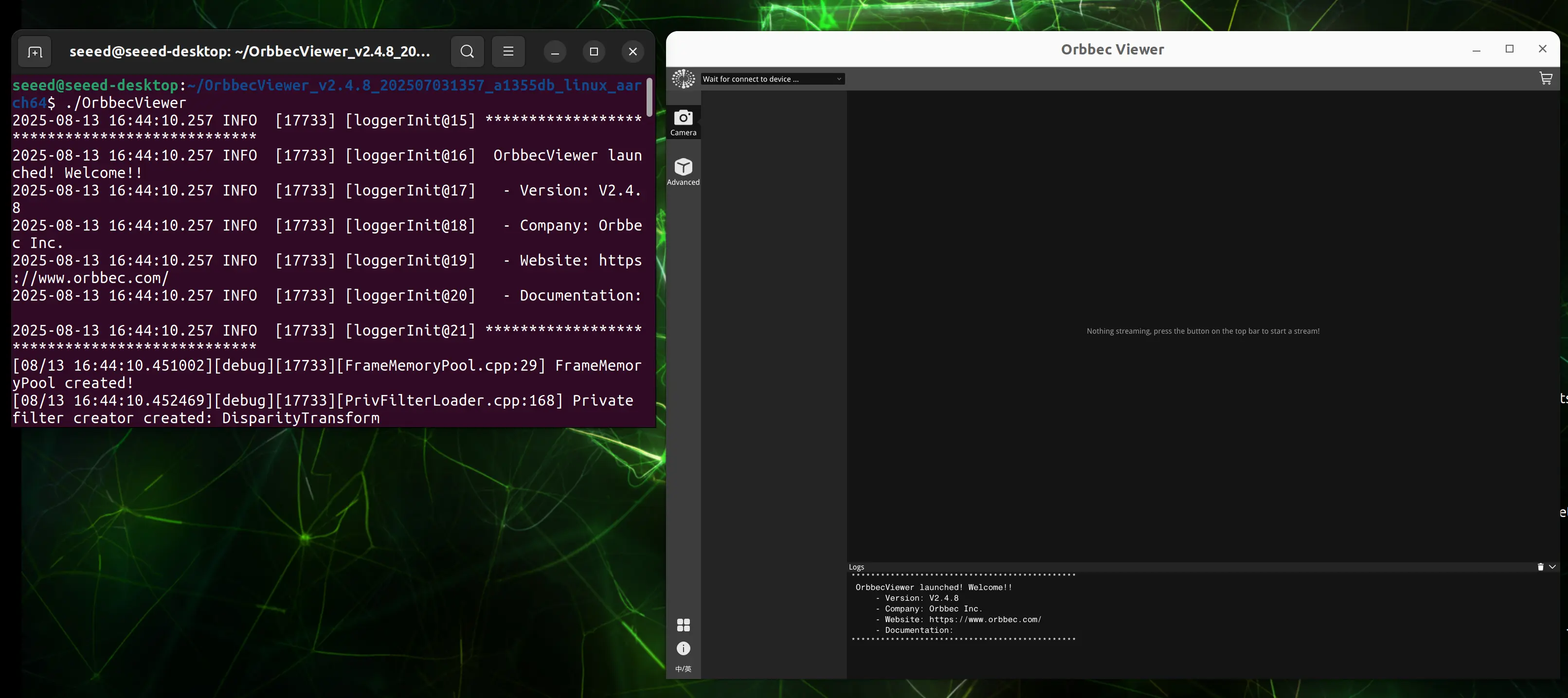
- Launch the Orbbec Viewer
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
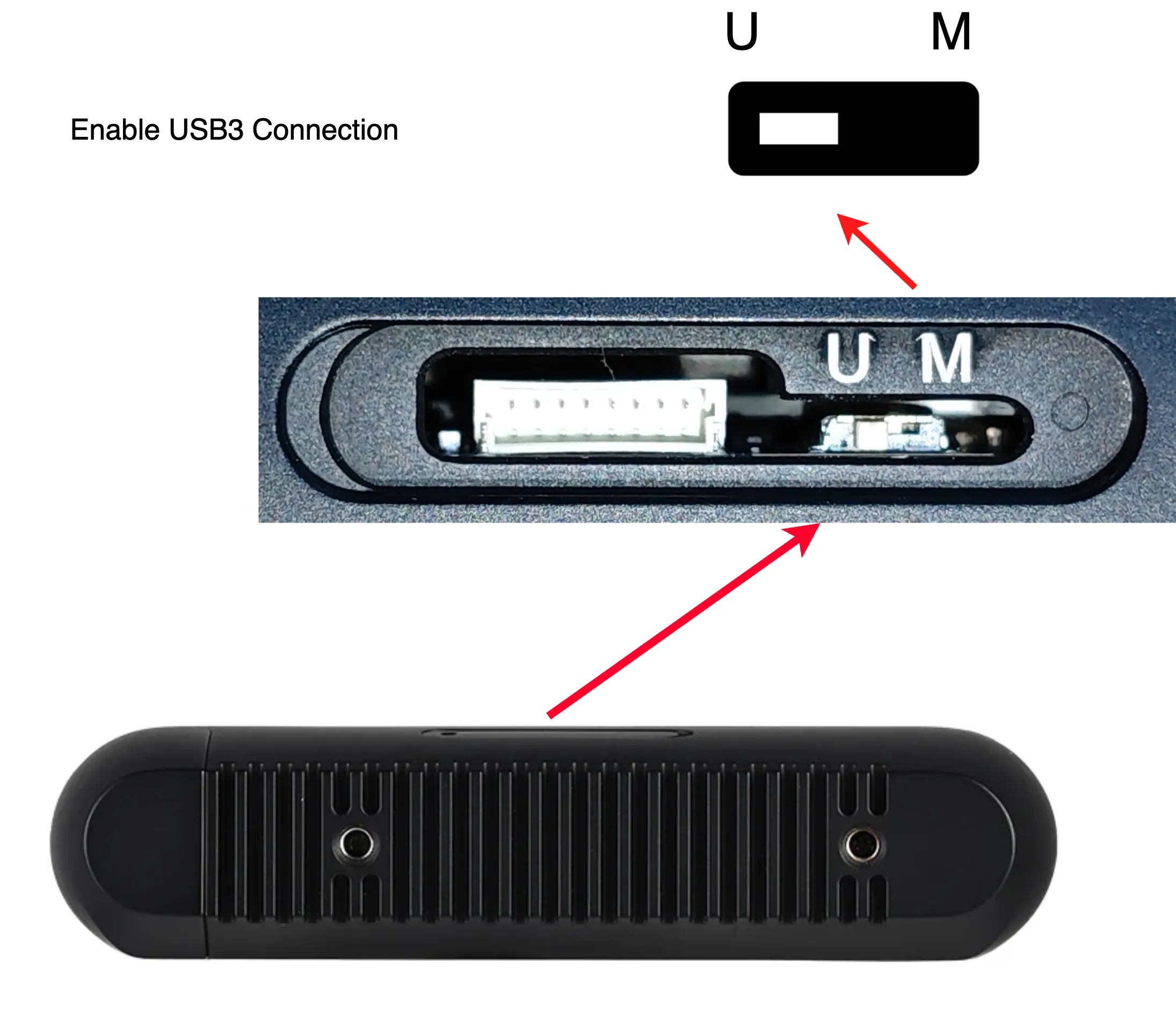
USB3接続
カメラ上部のDIPスイッチ(まず金属カバーを取り外してください)を文字**'U'**の位置に設定します。
必要なもの:
- USB 3プロトコルをサポートするUSB Type-CからUSB Type Aケーブル
- USB 3 Type Aポートを持つホストJetsonデバイス
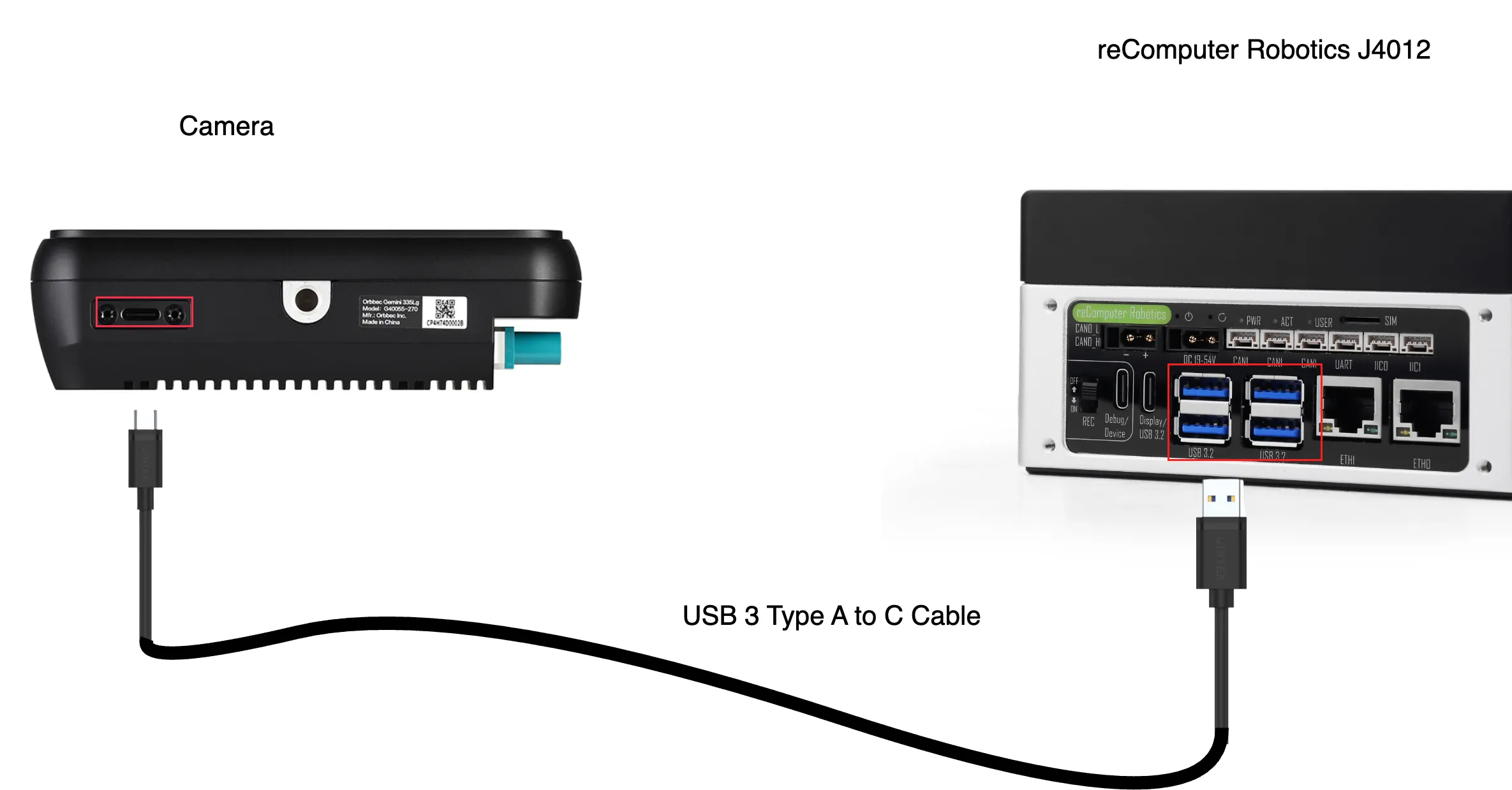
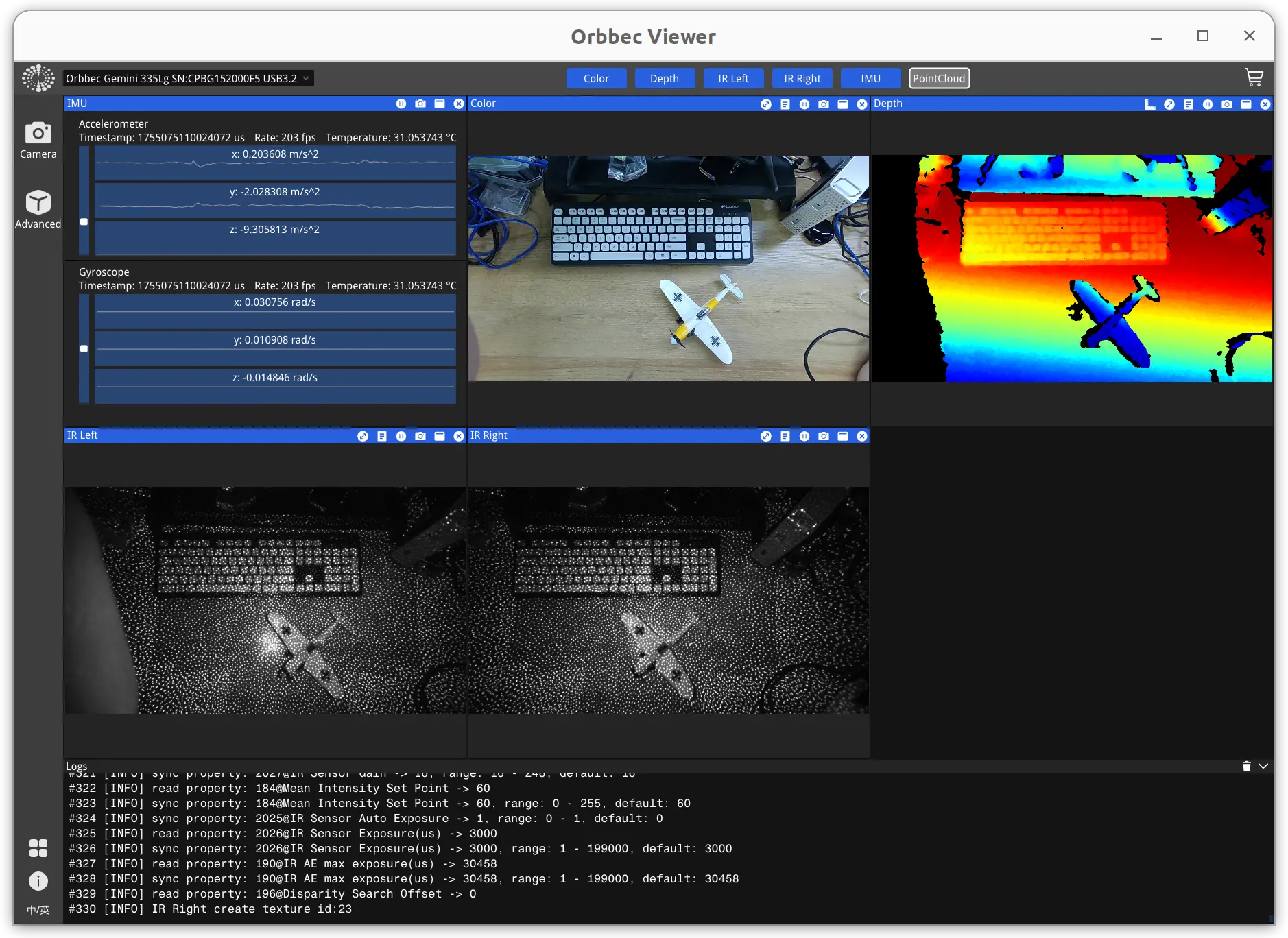
カメラを接続し、OrbbecViewerを使用して可視化します。
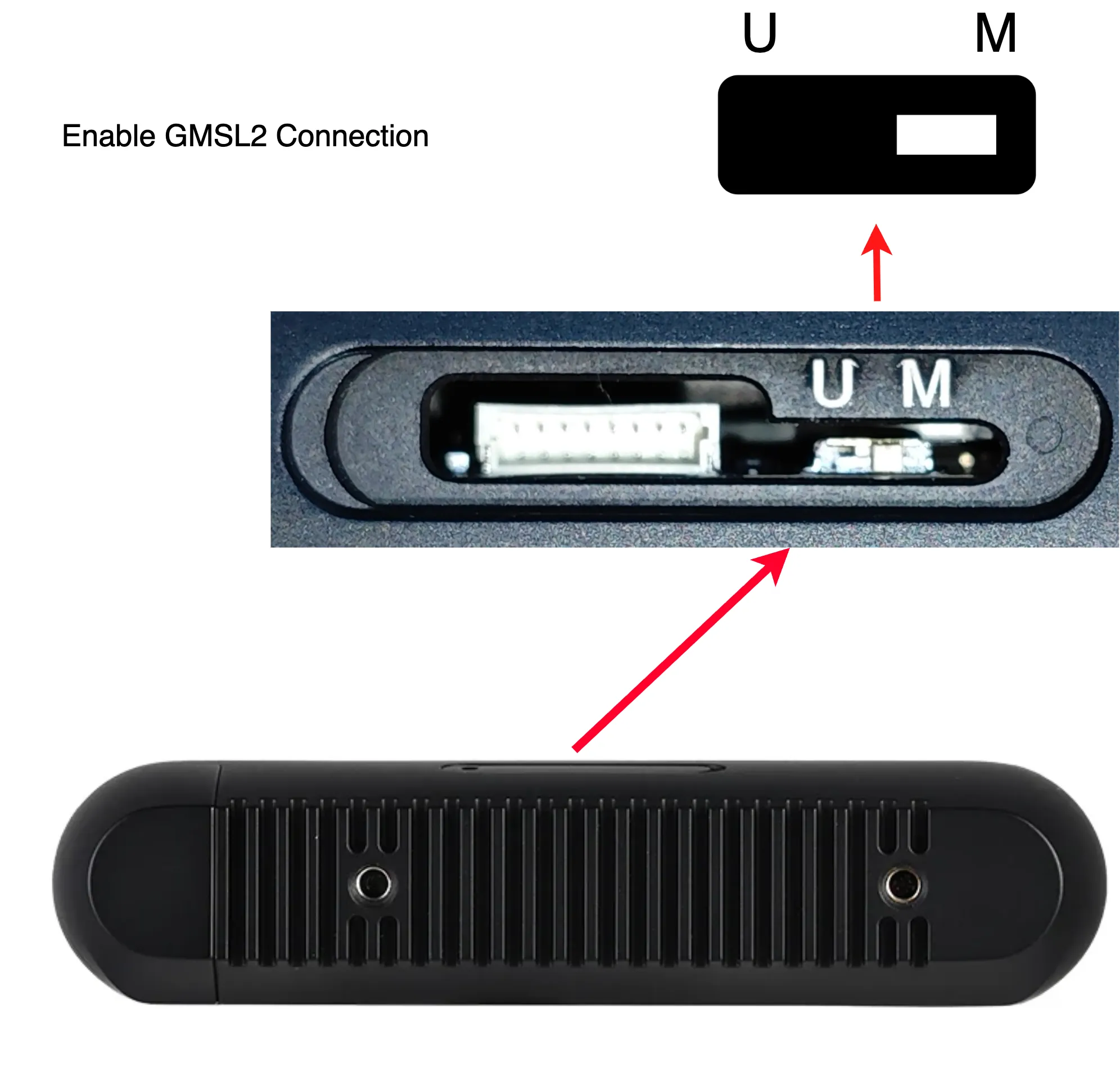
GMSL2接続
カメラ上部のDIPスイッチ(まず金属カバーを取り外してください)を文字**'M'**の位置に設定します。
必要なもの:
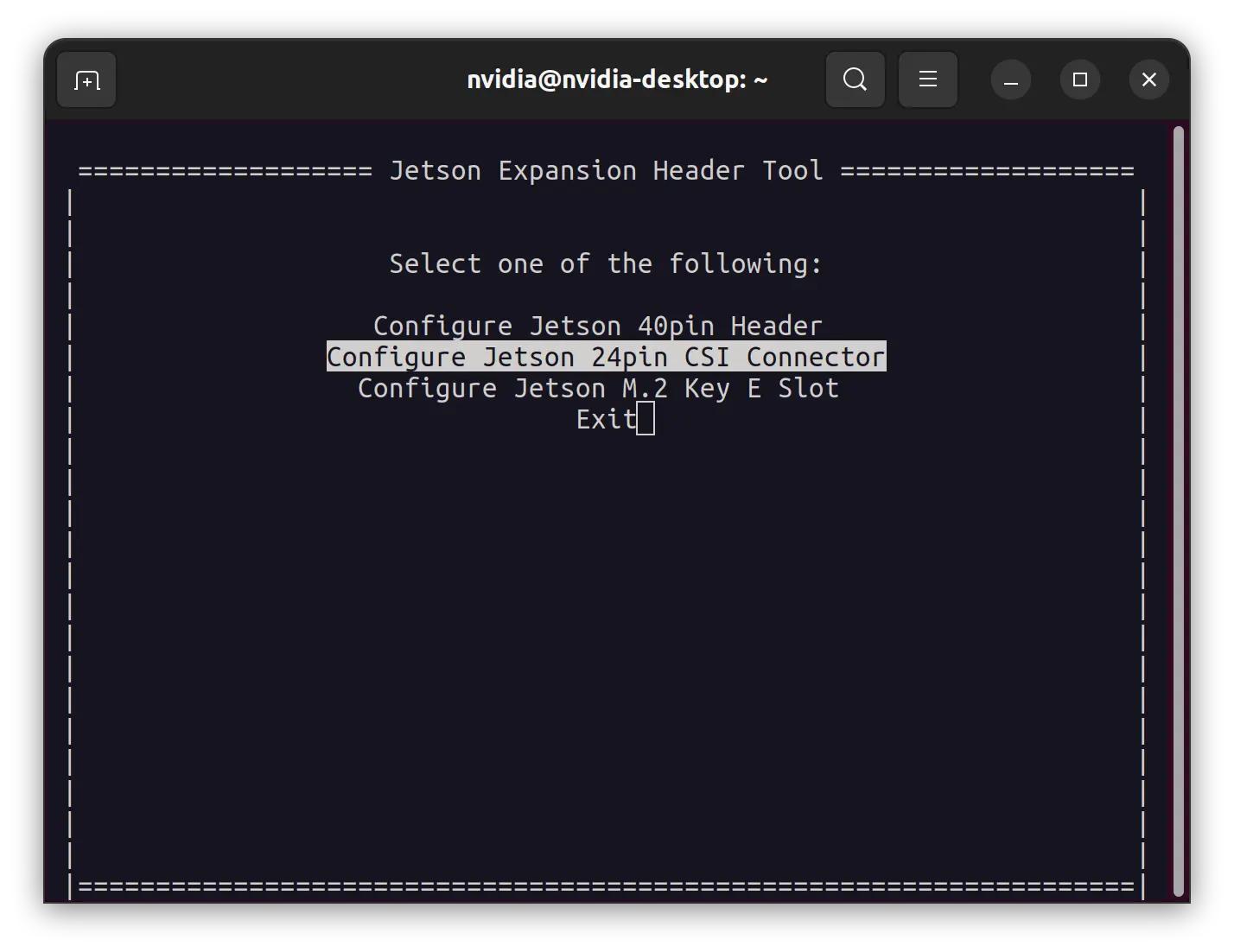
カメラを接続し、デバイス上でJetson IOを起動します
sudo /opt/nvidia/jetson-io/jetson-io.py
デバイスツリーオーバーレイを段階的に設定します:
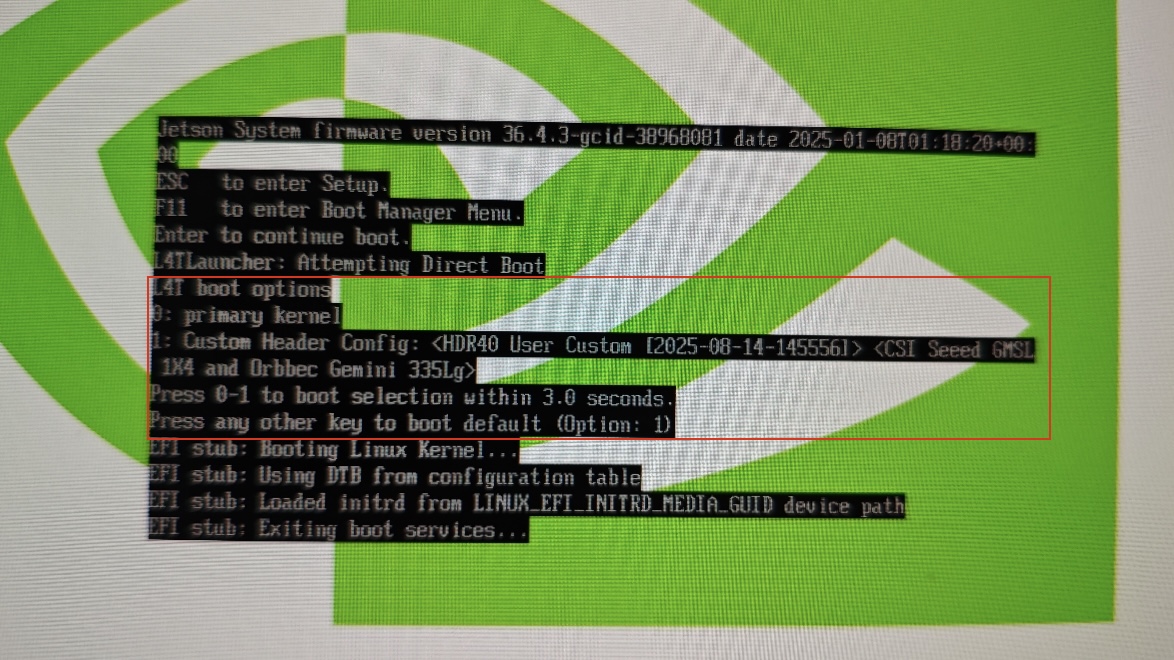
Jetsonデバイスを再起動します。Jetson Firmwareページで、プロンプトに従って正しいエントリを選択する必要がある場合があります。この場合、**'1'**を押してCustom Header Configを使用します。
Mini FAKRAケーブルでカメラを接続します。

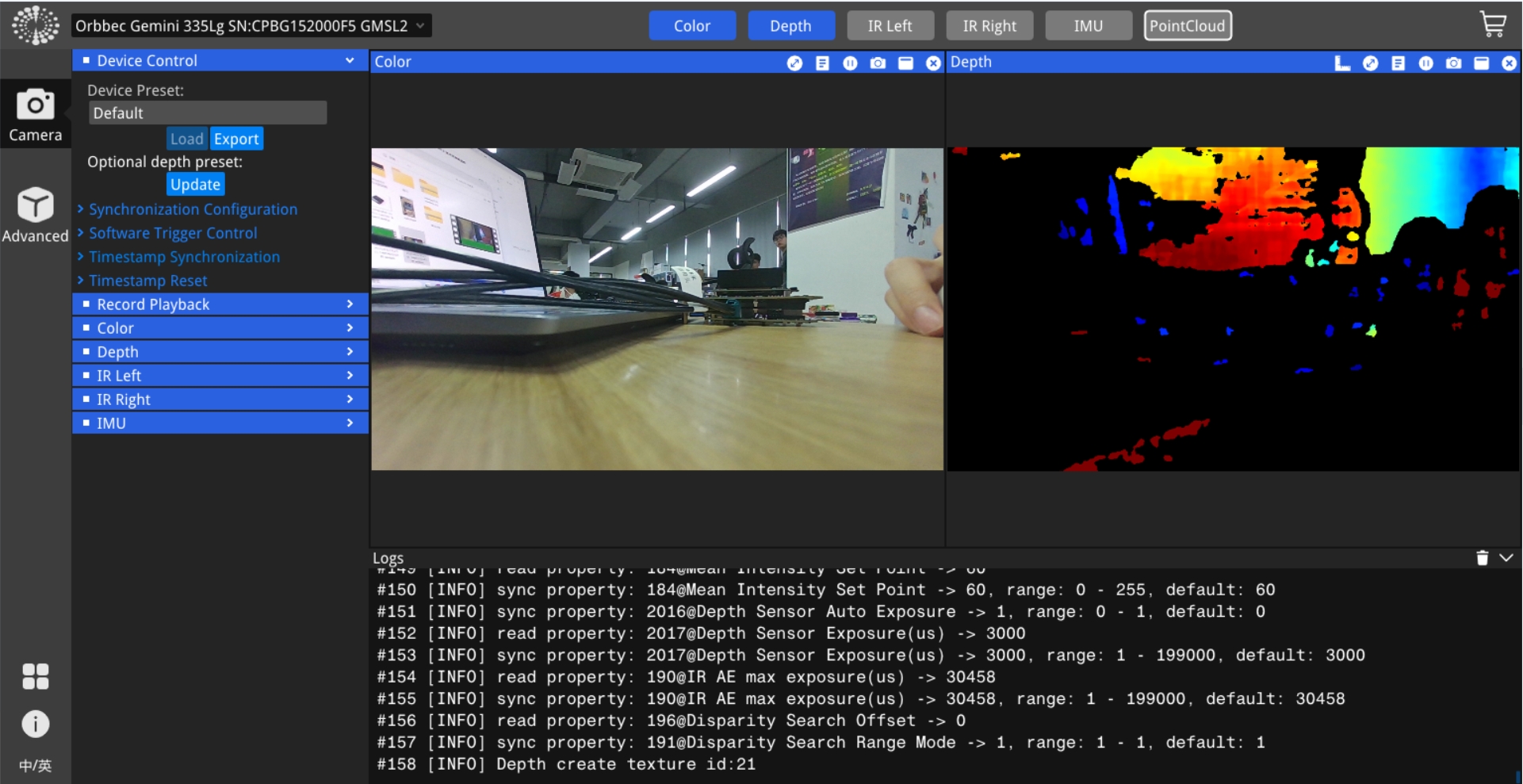
OrbbecViewerを使用して結果を可視化します
追加リソース
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!最新ニュースとサポートを受けるために、以下のプラットフォームで必ずフォローしてください。
