
概要
説明
reComputer R1225 は、CM4 を搭載し AI 機能を備えた、産業用 Raspberry Pi ベースの高性能で柔軟な IoT LoRaWAN ゲートウェイ兼コントローラです。3 つの RS485 インターフェース、デュアル Ethernet ポートを備え、BACnet および Modbus プロトコルをサポートしており、堅牢で信頼性の高い産業用エッジ IoT デバイスに必要なすべての機能を提供します。AI NPU アクセラレータに対応しているため、特に BMS、BAS、iBMS システムにおける遠隔アクセス制御アプリケーションに最適なソリューションです。
特長
ビルオートメーションシステム向けに設計
-
複数の絶縁 RS485 チャネルにより、高速および低速通信の両方をサポート
-
BACnet、Modbus RTU、および Modbus TCP/IP プロトコルをサポート
-
最大 4GB の RAM により、数千ポイントのデータ処理をサポート
-
両面の視認性に優れた LED インジケータにより、動作状態を素早く確認可能
-
高品質な金属筐体で、DIN レールおよび壁面取り付けに対応
-
SenseCAP Gateway OS、ChirpStack、Basics™ Station、内蔵パケットフォワーダーなどのオープンソースソフトウェアを提供。カスタマイズや二次開発に対応。
強力なパフォーマンス
-
Raspberry Pi CM4 搭載
-
Broadcom BCM2711 クアッドコア Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz
-
最大 4GB RAM と 32GB eMMC
充実した無線機能
-
オンチップ Wi-Fi
-
オンチップ BLE
-
Mini-PCle1: LTE
- 4G バージョンには LTE モジュールをプリインストール:
- EU868: EC25-EUX-mini-PCIe (LTE Cat 4)
- US915: EC25-AFXGA-mini-PCIe (LTE Cat 4)
- 4G バージョンには LTE モジュールをプリインストール:
-
Mini-PCle2: SPI LoRa® モジュールをプリインストール
- EU868: Wio-WM1302 LoRaWAN Gateway Module (SPI) - EU868
- US915: Wio-WM1302 LoRaWAN Gateway Module (SPI) - US915
豊富なインターフェース
- 3x RS485(絶縁)
- 1x 10M/100M/1000M Ethernet(PoE 対応)
- 1x 10M/100M Ethernet
- 1x HDMI 2.0
- 2x Type-A USB2.0
- 1x Type-C USB2.0(OS 更新用 USB コンソール)
- 1x SIM カードスロット
安全性と信頼性
- ハードウェアウォッチドッグ
- UPS スーパーキャパシタ(同梱)
- 側面に PC パネルを備えた金属筐体
- ESD: EN61000-4-2, レベル 3
- EFT: EN61000-4-4, レベル 2
- サージ: EN61000-4-5, レベル 2
- 生産継続期間: reComputer R1225 は少なくとも 2030 年 12 月まで生産予定
命名規則

仕様
| パラメータ | 説明 | |
| ハードウェア仕様 | ||
| CPU | Raspberry Pi CM4, Quad-core Cortex-A72@ 1.5GHz | |
| オペレーティングシステム | Raspberry Pi OS, Ubuntu | |
| RAM | 4GB | |
| eMMC | 32GB | |
| システム仕様 | ||
| 入力 | 2 ピン端子台 | |
| PoE(受電デバイスとして) | IEEE 802.3af 規格, 12.95W | |
| 供給電圧(AC/DC) | 12~24 V AC/9~36 V DC | |
| 過電圧保護 | 40V | |
| 消費電力 | comming soon | |
| 電源スイッチ | なし | |
| 再起動スイッチ | あり | |
| インターフェース | ||
| Ethernet | 1 x 10/100/1000 Mbps(PoE 対応*) | |
| 1 x 10/100 Mbps IEEE802.3/802.3u | ||
| USB | 2 x USB-A 2.0 ホスト | |
| 1 x USB-C 2.0(OS 書き込み用) | ||
| RS485 | 3 x 3 ピン端子台(絶縁) | |
| HDMI | 1 x HDMI 2.0 | |
| SIM カードスロット | 標準 SIM カードをサポート | |
| M.2 スロット | M.2 NVMe SSD をサポート | |
| LED | 6 x LED インジケータ | |
| ブザー | 1 | |
| リセットボタン | 1 | |
| DSI(予約済み) | LCD に対応*(筐体内のオンボード) | |
| 無線通信 | ||
| Wi-Fi: 2.4/5.0 GHz | オンチップ Wi-Fi | あり |
| BLE: 5.0 | オンチップ BLE | あり |
| LoRa®(使用中) | SPI LoRa® | |
| 4G セルラー(オプション) | 4G LTE* | |
| 規格 | ||
| EMC | ESD:EN61000-4-2、レベル 3 | |
| EFT:EN61000-4-4、レベル 2 | ||
| サージ:EN61000-4-5、レベル 2 | ||
| 認証 | CE, FCC | |
| RoHS | ||
| 周囲条件 | ||
| IP 等級 | IP40 | |
| 動作温度 | -30~70 °C | |
| 動作湿度 | 10~95% RH | |
| 保管温度 | -40~80 °C | |
| その他 | ||
| スーパーキャパシタ UPS | SuperCAP UPS LTC3350 モジュール | |
| ハードウェアウォッチドッグ | 1~255s | |
| RTC | 高精度 RTC | |
| セキュリティ | 暗号化チップ TPM 2.0* | |
| ATECC608A | ||
| 放熱 | ファンレス | |
| 保証 | 2 年 | |
| 製品ライフタイム | 2030 年 12 月まで | |
| コンポーネントおよびインターフェース状態の説明 | ||
| 予約済み | 将来の使用または拡張のために指定されています。 | |
| オプション | 必須ではないコンポーネントで、ユーザーが含めるかどうかを選択できます。 | |
| 使用中 | 現在使用されており、製品機能に不可欠です。 | |
| 同梱 | 標準パッケージに含まれる必須コンポーネント。 | |
| 機構 | ||
| 寸法(W x H x D) | 130 mm x 93 mm x 49.6 mm | |
| 筐体 | 6061 アルミニウム合金ケース(透明 PC サイドパネル付き) | |
| 取り付け | DIN レール / 壁面 | |
| 重量(正味) | 750 g;R1225(4G モジュール搭載):800 g | |
付記
「*」マークの付いたオプションは、アクセサリ一覧に従って別途購入が必要です。
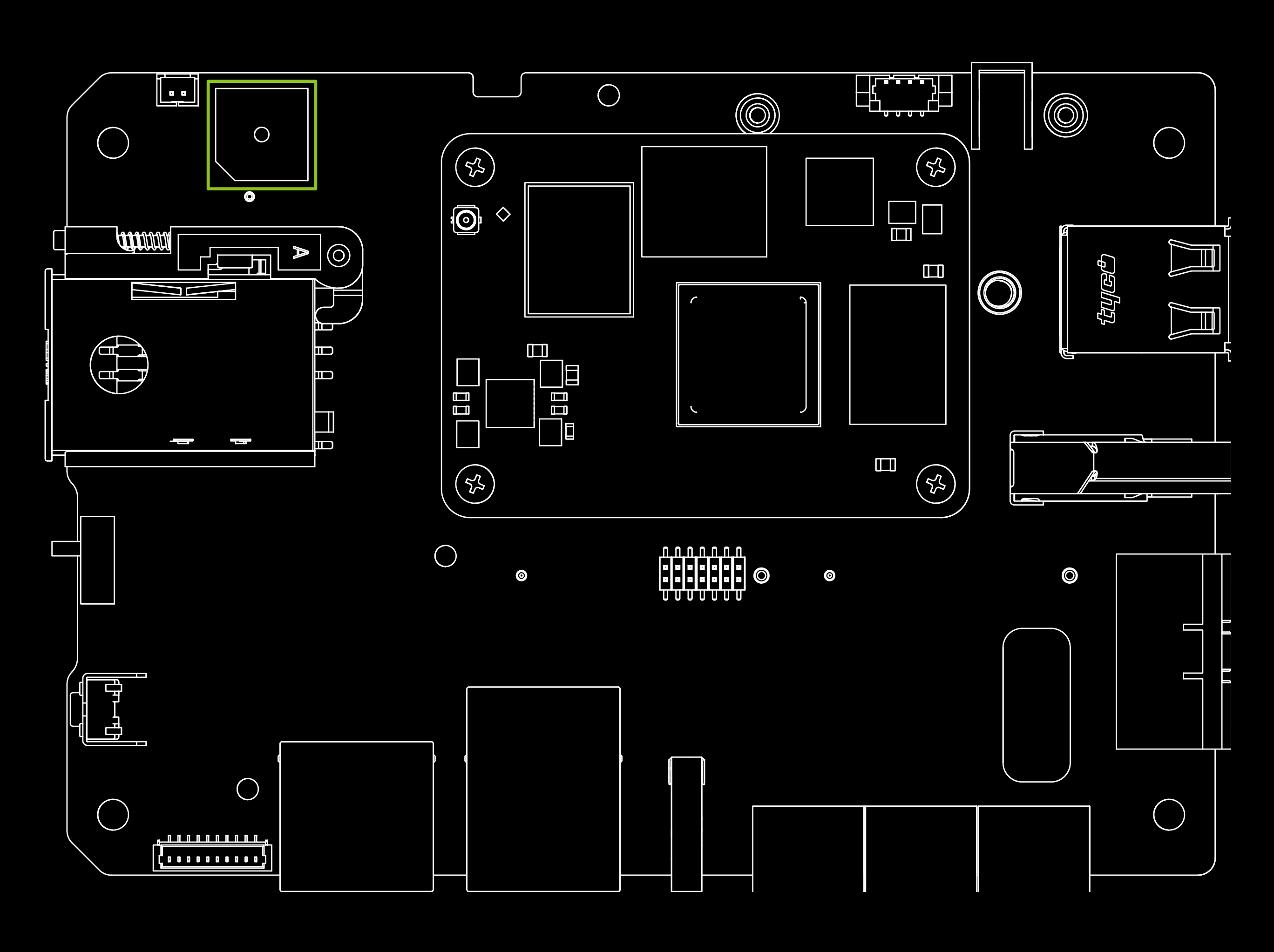
ハードウェア概要

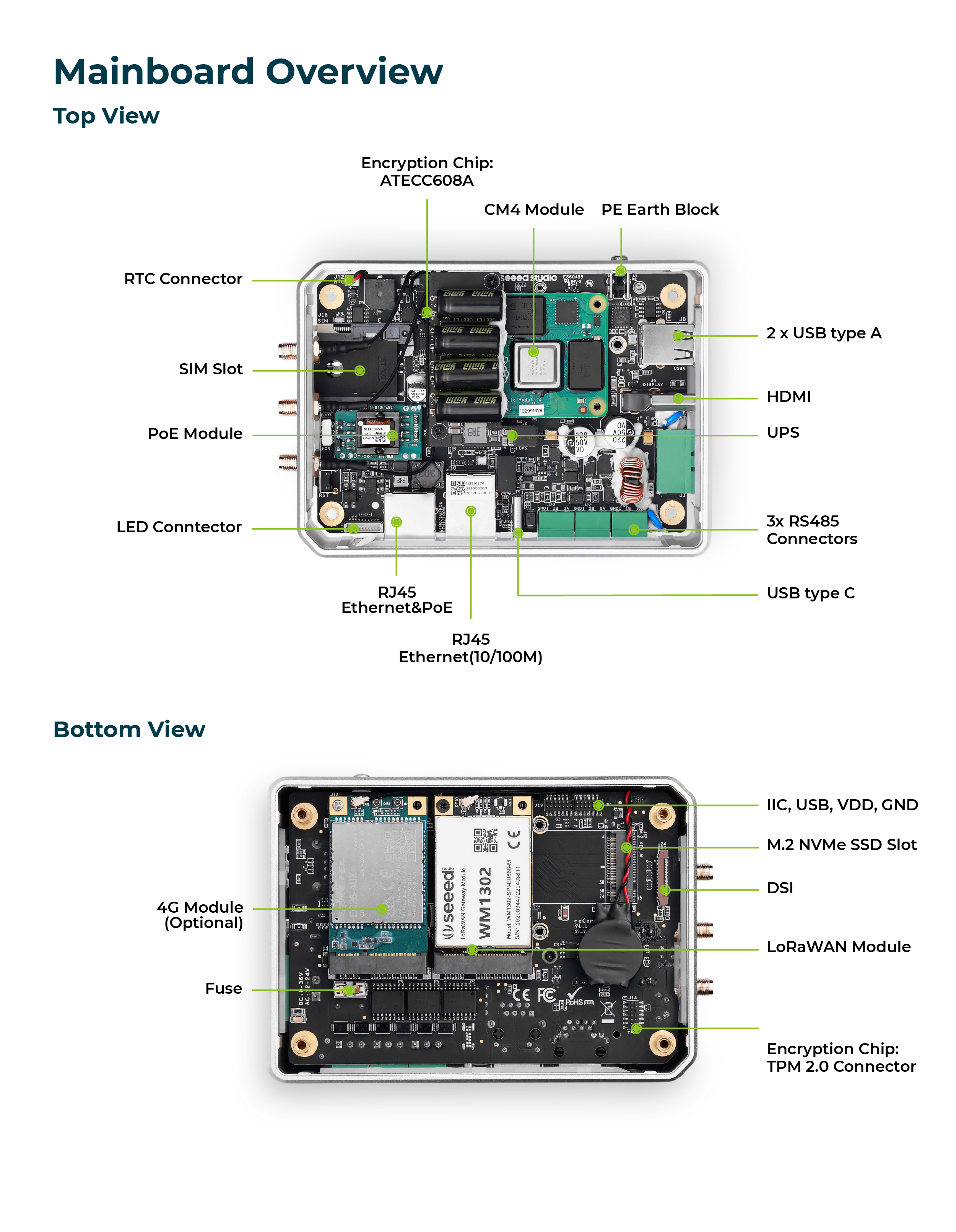
メインボード概要
電源回路図
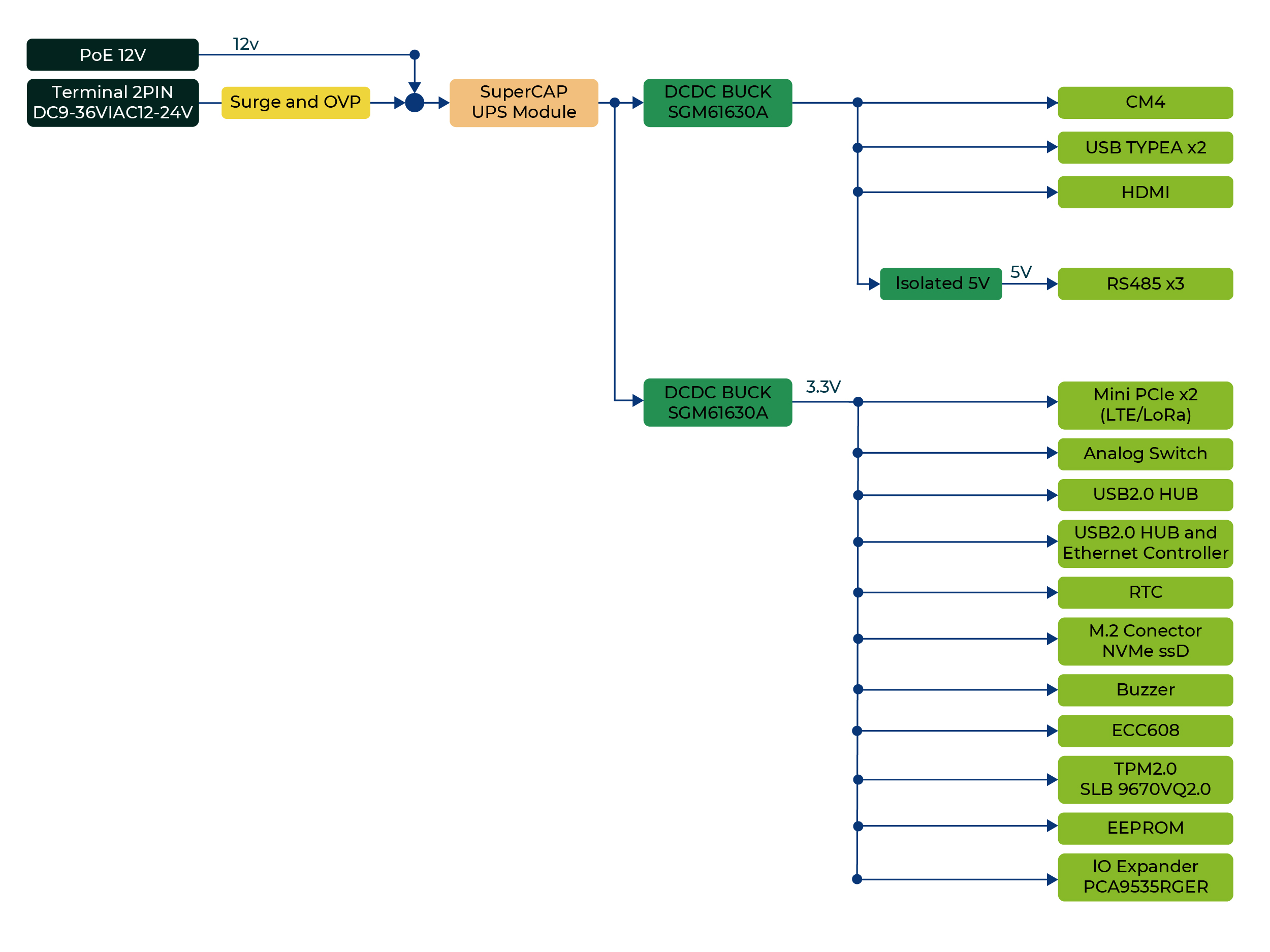
reComputer R1225 は AC、DC 端子、PoE の 3 つの電源供給オプションをサポートしています。標準では、reComputer R1225 は AC/DC 端子から給電されます(公式地域別電源アダプタ SKU:110061505/110061506)。PoE モジュール(SKU:110991925)が同梱されており、電源供給の柔軟性がさらに向上します。
2 ピン電源端子
reComputer R1225 は、公称入力電圧 12~24V または DC 電圧 9~36V をサポートします。電源は 2 ピン電源端子台コネクタを介して接続します。装置を適切にアースするために、アース線は電源端子左上隅にあるネジに固定できます。
この電源ソリューションは、逆接続保護用のブリッジ整流ダイオードを使用しており、AC と DC の両入力に対応しています。これにより、電源の正極と負極がどのように接続されていても回路が損傷することはありません。ブリッジ整流器を使用することで、入力 DC の極性にかかわらず出力電圧の極性が一定に保たれ、効果的な逆接続保護が提供されます。
POE(同梱)
PoE モジュールを取り付けると、reComputer R1225 の ETH0 ポートは PoE 給電をサポートし、Ethernet 経由で装置に給電する便利で効率的な方法を提供します。このオプションにより、設置作業が簡素化され、必要な配線の量が削減されるため、電源が限られた用途や電源コンセントが容易に利用できない環境に最適なソリューションです。
- PoE 入力:範囲 44~57V、標準 48V
- PoE 出力:12V、最大 1.1A
reComputer R1225 に付属する PoE モジュールは IEEE 802.3af 規格に準拠しており、最大 12.95W の電力供給が可能であることに留意してください。**そのため、SSD や 4G モジュールなどの高電力周辺機器を接続する必要がある場合、PoE 給電だけでは十分でない可能性があります。**この場合は、装置の安定かつ信頼性の高い動作を確保するため、AC/DC 端子から給電することを推奨します。
消費電力
Seeed Studio のラボにおける reComputer R1225 の消費電力テスト結果については、以下の表を参照してください。この値はあくまで参考値であり、テスト方法や環境により結果が変動する可能性があることに注意してください。
消費電力の表はまもなく更新されます。
電源オン/オフ
reComputer R1225 には標準では電源ボタンが搭載されておらず、電源が接続されると自動的に起動します。シャットダウンする際は、オペレーティングシステム上でシャットダウンオプションを選択し、システムが完全に停止するまで待ってから電源を切ってください。システムを再起動するには、再度電源を接続するだけでかまいません。
シャットダウン後は、内部コンデンサを完全に放電させるため、少なくとも 10 秒待ってからシステムを再起動してください。
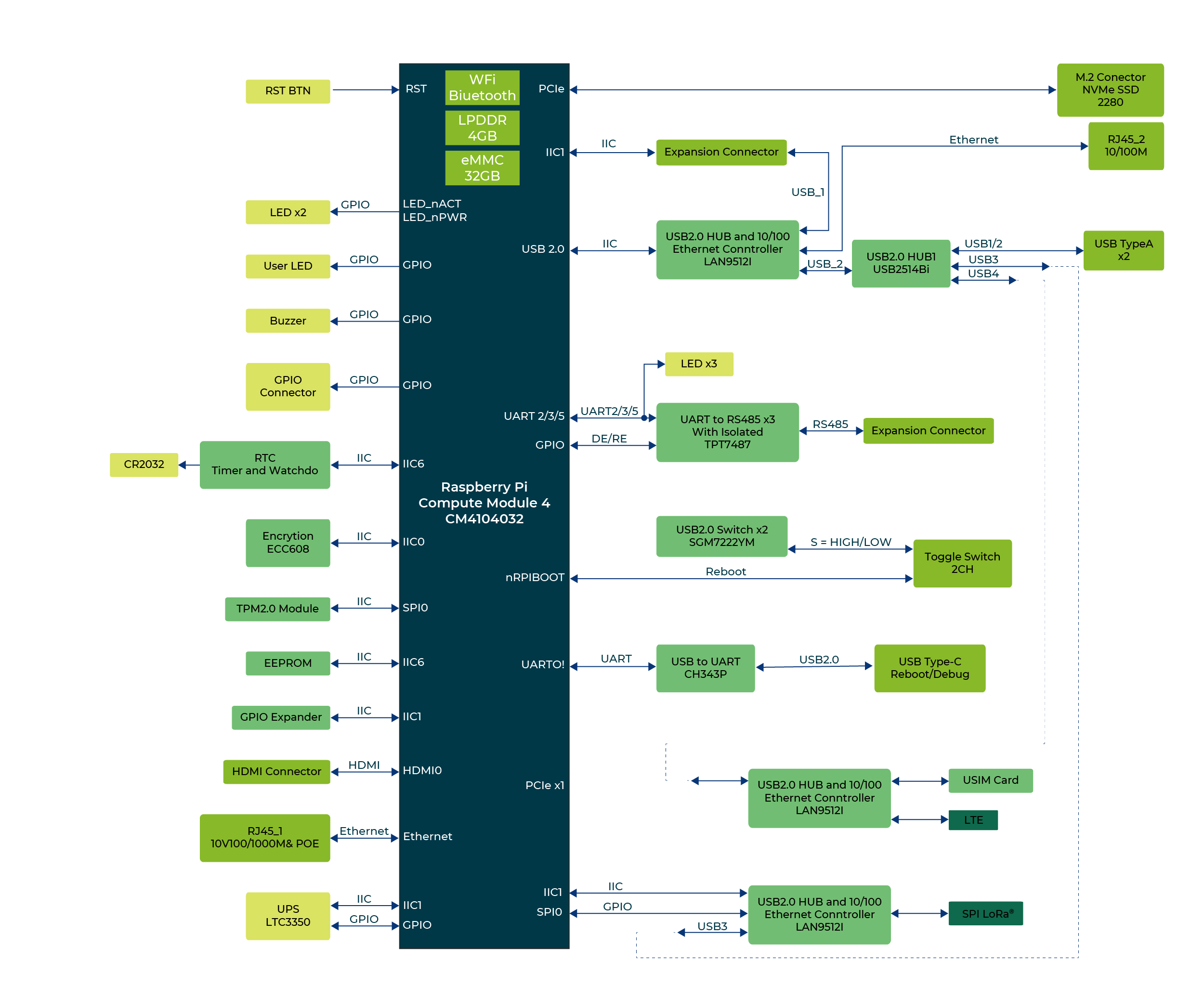
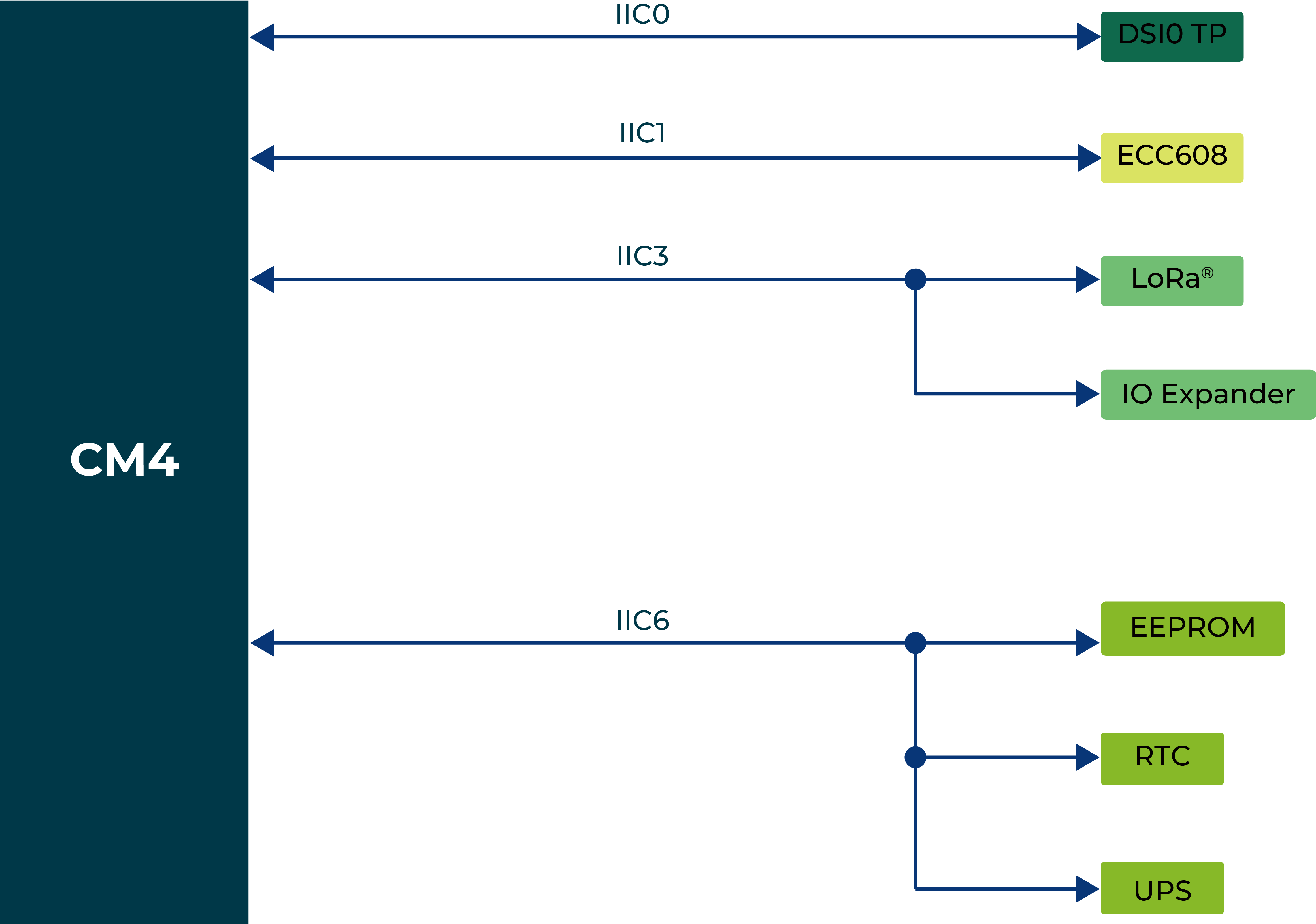
ブロック図
IIC 回路図
インターフェース
| Interface | ||
| Ethernet | 1 x 10/100/1000 Mbps IEEE 1588-2008(PoE 対応) | |
| 1 x 10/100 Mbps IEEE802.3/802.3u | ||
| USB | 2 x USB-A 2.0 ホスト | |
| 1 x USB-C 2.0(OS 書き込み用) | ||
| RS485 | 3 x 3 ピン端子台(絶縁) | |
| HDMI | 1 x HDMI 2.0 | |
| SIM カードスロット | 標準 SIM カードに対応 | |
| M.2 スロット | M.2 NVMe SSD に対応 | |
| LED | 6 x LED インジケータ | |
| ブザー | 1 | |
| リセットボタン | 1 | |
| HDMI | 1 x HDMI 2.0 | |
| DSI | LCD* をサポート(筐体内オンボード) | |
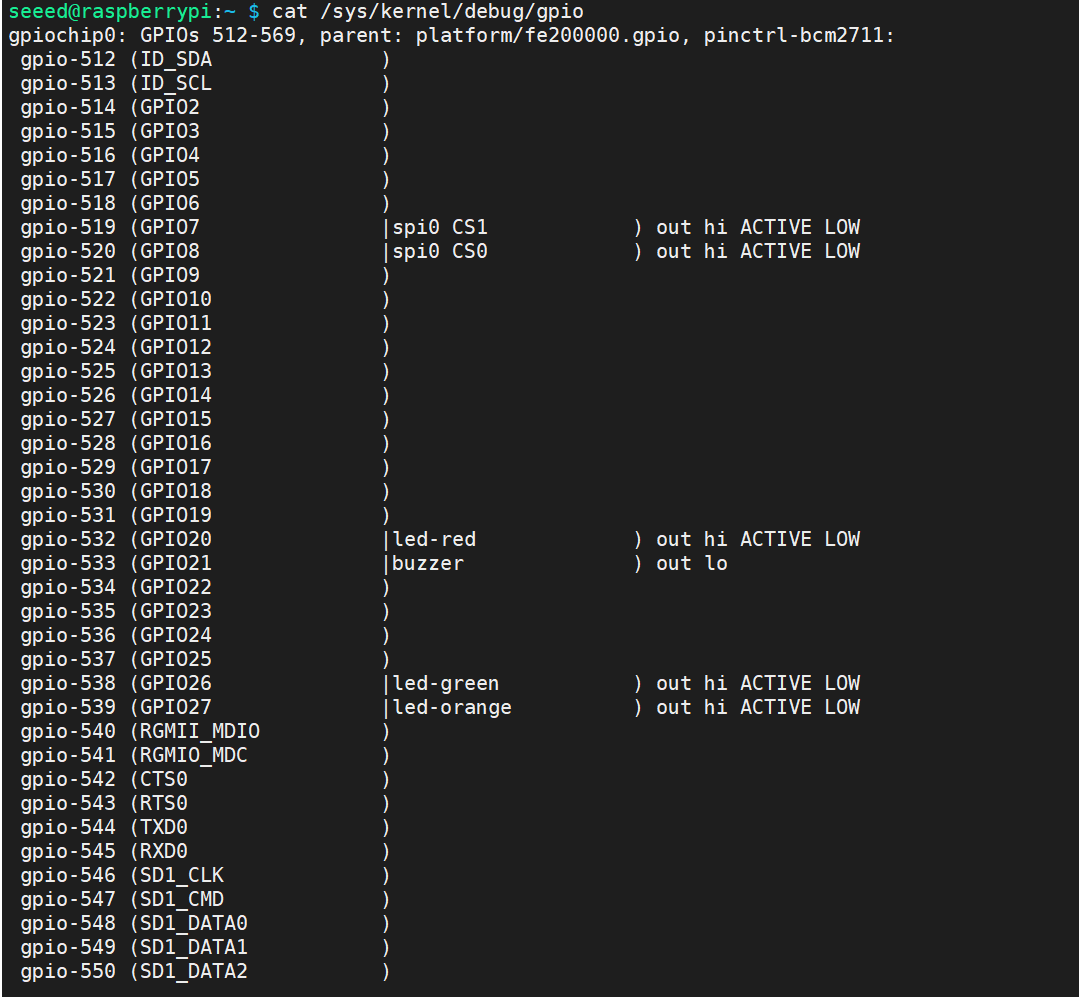
GPIO のマッピングおよびオフセットを確認するには、次のコマンドを使用してください:
cat /sys/kernel/debug/gpio
LED インジケータの状態
reComputer R1225 には 6 つの LED インジケータが搭載されており、装置の動作状態を示します。各 LED の具体的な機能および状態については、以下の表を参照してください。
| LED インジケータ | 色 | 状態 | 説明 |
|---|---|---|---|
| PWR | Green | On | 装置が電源に接続されています。 |
| Off | 装置が電源に接続されていません。 | ||
| ACT | Green | Linux では、このピンが点滅して eMMC アクセスを示します。 起動中にエラーが発生した場合、この LED はエラー パターンで点滅し、Raspberry Pi ウェブサイト上の表を使って解読できます。 | |
| USER | Green/Red/Blue | ユーザーが定義する必要があります。 | |
| RS485-1 | Green | Off | RS485 チャネル 1 でデータ転送が行われていません。 |
| Blink | RS485 チャネル 1 がデータを送受信しています。 | ||
| RS485-2 | Green | Off | RS485 チャネル 2 でデータ転送が行われていません。 |
| Blink | RS485 チャネル 2 がデータを送受信しています。 | ||
| RS485-3 | Green | Off | RS485 チャネル 3 でデータ転送が行われていません。 |
| Blink | RS485 チャネル 3 がデータを送受信しています。 |
ACT ステータステーブル
| 長い点滅回数 | 短い点滅回数 | ステータス |
|---|---|---|
| 0 | 3 | 一般的なブート失敗 |
| 0 | 4 | start*.elf が見つかりません |
| 0 | 7 | カーネルイメージが見つかりません |
| 0 | 8 | SDRAM 障害 |
| 0 | 9 | SDRAM 不足 |
| 0 | 10 | HALT 状態 |
| 2 | 1 | パーティションが FAT ではない |
| 2 | 2 | パーティションからの読み取り失敗 |
| 2 | 3 | 拡張パーティションが FAT ではない |
| 2 | 4 | ファイル署名/ハッシュ不一致 - Pi 4 |
| 4 | 4 | 未対応のボードタイプ |
| 4 | 5 | 致命的なファームウェアエラー |
| 4 | 6 | 電源障害タイプ A |
| 4 | 7 | 電源障害タイプ B |
ACT LED が規則的な 4 回点滅パターンで点滅する場合、ブートコード(start.elf)が見つかっていません。 ACT LED が不規則なパターンで点滅する場合は、ブート処理が開始されています。 ACT LED が点滅しない場合、EEPROM コードが破損している可能性があります。何も接続しない状態でもう一度試して確認してください。詳しくは Raspberry Pi フォーラムを確認してください: STICKY: Is your Pi not booting? (The Boot Problems Sticky) - Raspberry Pi Forums 詳しくは Raspberry Pi forum を確認してください。
Luci インターフェースによるカスタマイズ可能な LED ライト
コマンドによる LED ライトの制御
ユーザー LED を制御するには、Linux カーネルが提供する疑似ファイルシステムで、さまざまなカーネルサブシステム、ハードウェアデバイス、およびそれらに関連するドライバに関する情報を公開する sysfs の使用を推奨します。reComputer R1225 では、ユーザー LED インターフェースを 3 つのデバイスファイル(led-red、led-blue、led-green)に抽象化しており、ユーザーはこれらのファイルを操作するだけで LED ライトを簡単に制御できます。以下に例を示します。
- 赤色 LED を点灯するには、ターミナルに次のコマンドを入力してください。
echo 1 | sudo tee /sys/class/leds/led-red/brightness
- 赤色 LED を消灯するには、ターミナルに次のコマンドを入力してください。
echo 0 | sudo tee /sys/class/leds/led-red/brightness
- 赤と緑の LED を同時に点灯させることもできます。ターミナルに次のコマンドを入力してください。
echo 1 | sudo tee /sys/class/leds/led-red/brightness
echo 1 | sudo tee /sys/class/leds/led-green/brightness
ブザー
reComputer R1225 にはアクティブブザーが搭載されており、アラームやイベント通知などさまざまな用途に使用できます。
reComputer R1225 ユーザー向け(R1225 は R1000 v1.1 ハードウェアプラットフォームに基づいています)において、ブザーは PCA9535 P15 に接続されています。ブザーをオフ(オン)にするには、ターミナルに次のコマンドを入力してください。
echo 591 | sudo tee /sys/class/gpio/export
echo out | sudo tee /sys/class/gpio/gpio591/direction
echo 1 | sudo tee /sys/class/gpio/gpio591/value # turn on
echo 0 | sudo tee /sys/class/gpio/gpio591/value # turn off
RS485
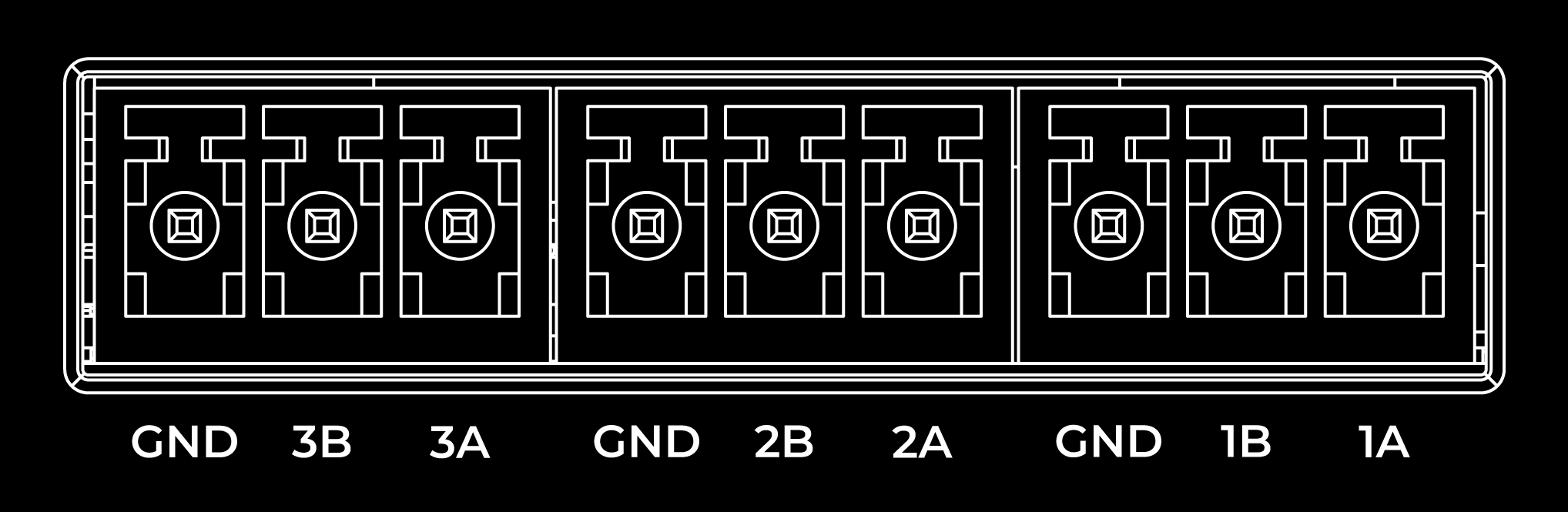
reComputer R1225 には 3 ピンコネクタを使用する 3 組の RS485 インターフェースが搭載されており、信号と電源の両方が絶縁されているため、産業用および自動化アプリケーションにおいて安全かつ信頼性の高い動作を実現します。RS485A および RS485B 信号は容量結合によるアイソレーションが施されており、優れた EMI 耐性を提供し、RS485 インターフェースの高速通信要件を満たします。
デフォルトでは、120 Ω の終端抵抗は実装されていません。ただし、スルーホール抵抗が 5 本パッケージに含まれています。必要に応じて、3 ピン端子台コネクタの A 端子と B 端子の間に抵抗をクランプして固定してください。

RS485 インターフェースはアイソレートされた電源を使用しているため、RS485 インターフェースに接続される外部デバイスの GND 信号は GND_ISO ピンに接続する必要があります。
これは、reComputer の 485 インターフェースに関連するピンのデータテーブルです。
| RS485 | RS485_POWER_EN | OS デバイスファイル | P14 | 既定(High) |
|---|---|---|---|---|
| TX5 | /dev/ttyAMA5 | GPIO12 | ||
| RX5 | GPIO13 | |||
| TX2 | ID_SD | /dev/ttyAMA2 | GPIO0/ID_SD | |
| RX2 | ID_SC | GPIO1/ID_SC | ||
| TX3 | /dev/ttyAMA3 | GPIO4 | ||
| RX3 | GPIO5 | |||
| RS485_1_DE/RE | (High/DE || Low/RE) | /dev/ttyAMA2 | GPIO6 | 既定 Low |
| RS485_2_DE/RE | /dev/ttyAMA3 | GPIO17 | 既定 Low | |
| RS485_3_DE/RE | /dev/ttyAMA5 | GPIO24 | 既定 Low |
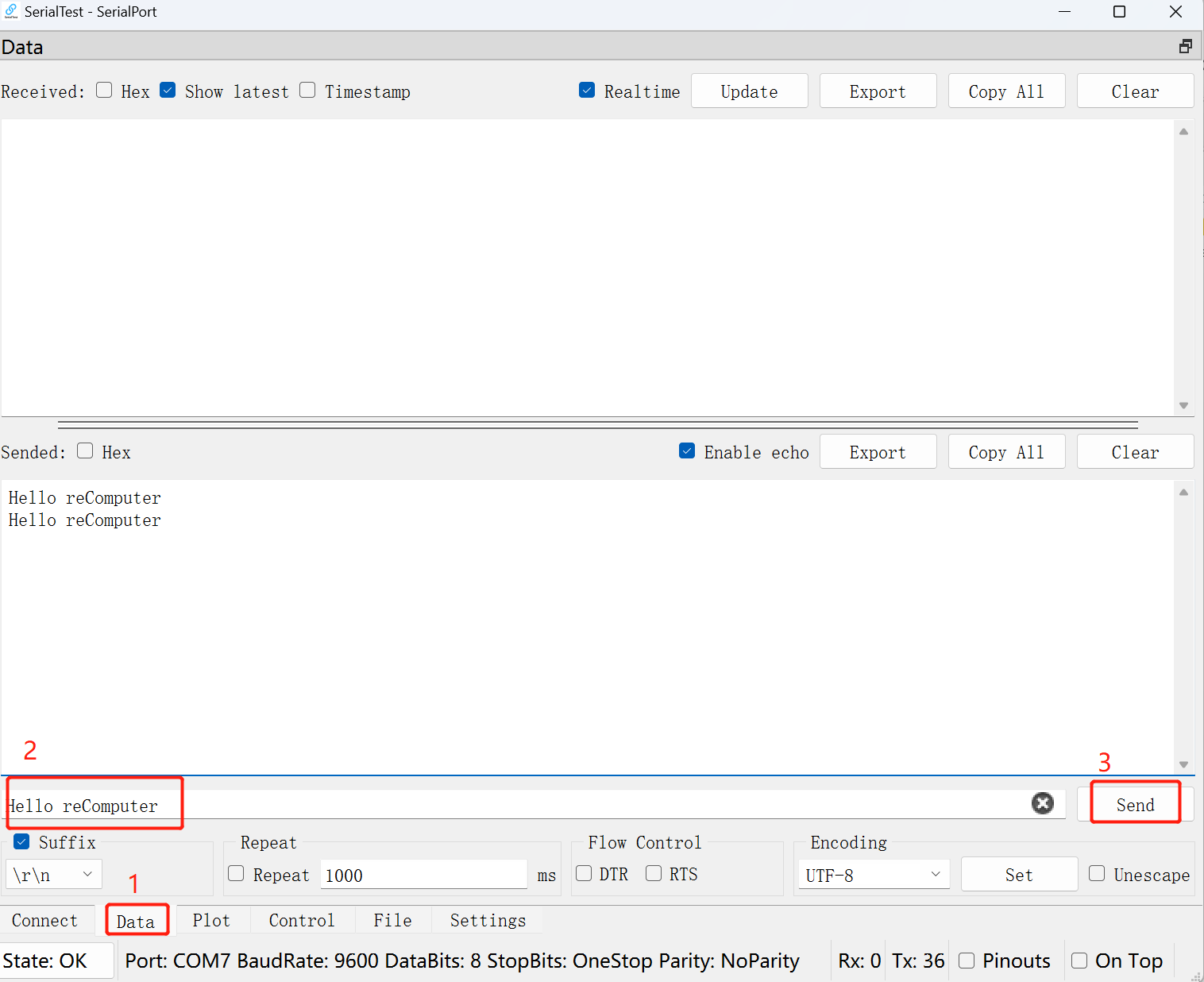
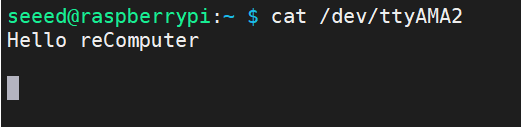
デフォルトでは、RS485 ポートの電源イネーブルポートは High であり、各 RS485 インターフェースは受信状態になっています。簡単な実験を行うことができます。
PC と reComputer-R を接続する 485 ポート。
reComputer のターミナルで次を入力します。
cat /dev/ttyAMA2
その後、コンピュータのシリアルデバッグツールでデータを送信すると、reComputer のターミナルウィンドウでそのデータを確認できます。
ブートスイッチ
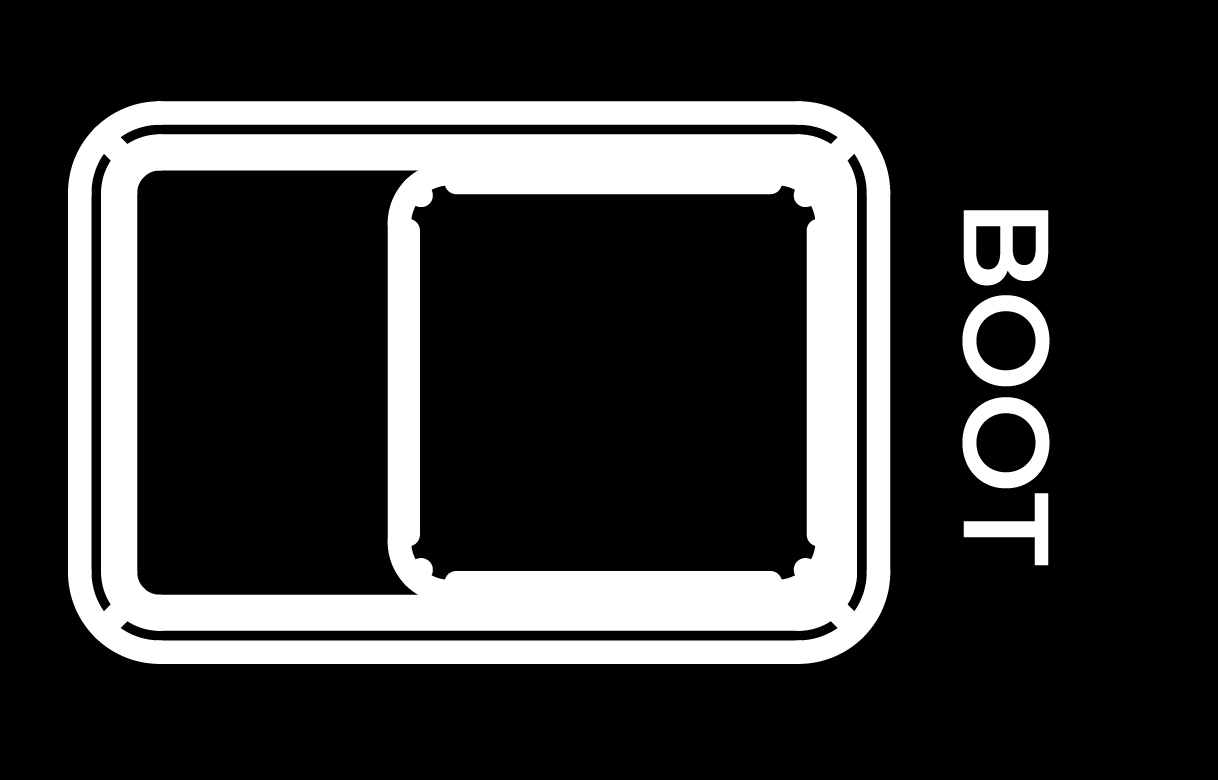
reComputer R1225 のブートスイッチは、CM4 の nRPI_BOOT ピンに接続されています。このスイッチにより、ユーザーは eMMC と USB のどちらからブートするかを選択できます。通常モードでは、スイッチを「BOOT」ラベル側から離した位置に設定し、システムを eMMC から起動させます。逆に、システムイメージを書き込む必要がある場合は、スイッチを「BOOT」ラベル側に切り替え、Type-C USB インターフェースからシステムを起動できるようにします。
| スイッチ位置 | モード | 説明 | nRPI-BOOT |
|---|---|---|---|
 | 通常モード | eMMC から起動 | Low |
| フラッシュモード | USB から起動 | High |
ブートモードでは、POE 電源供給機能は使用できません。
USB
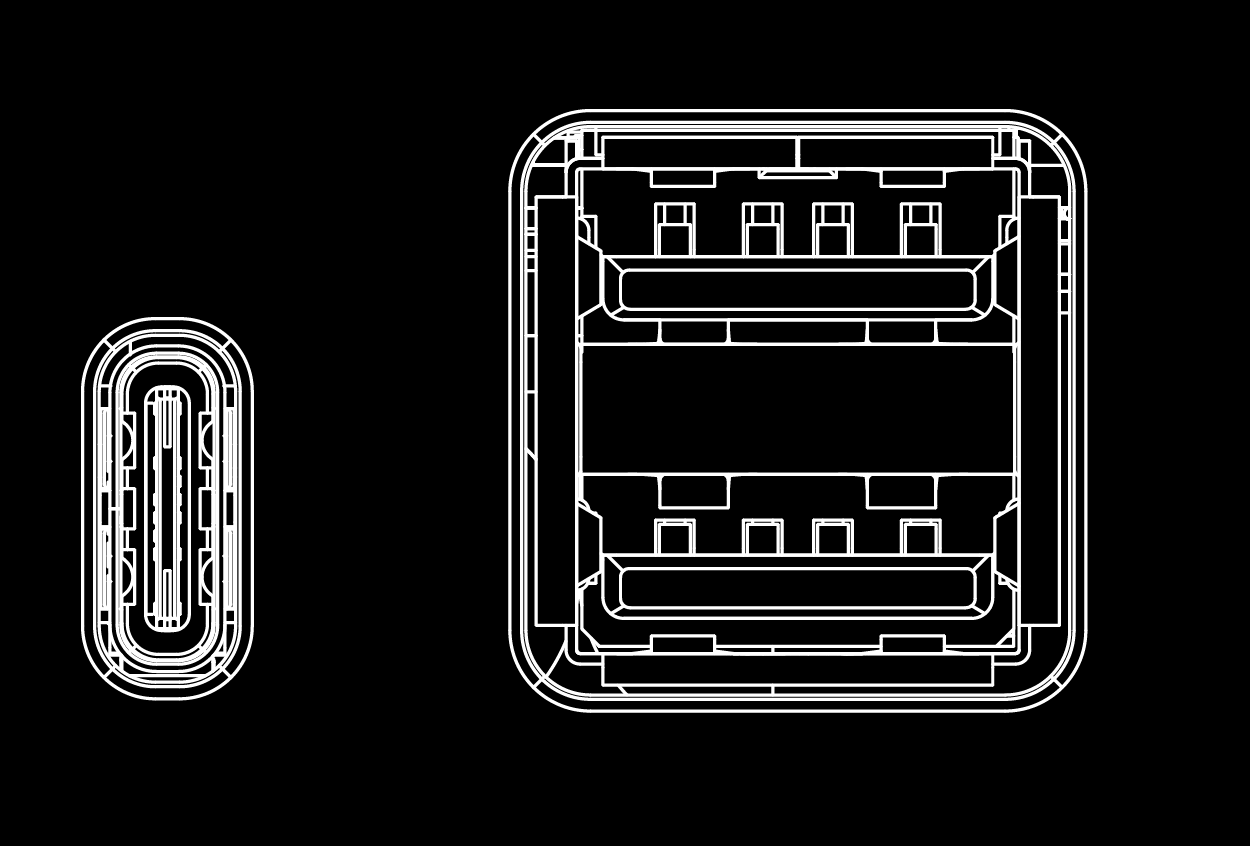
reComputer R1225 には 1 つの USB Type-C ポートと 2 つの USB Type-A ポートが装備されています。それぞれの機能と説明については、以下の表を参照してください。
| タイプ | 数量 | プロトコル | 機能 | 説明 |
|---|---|---|---|---|
| Type-C | *1 | USB2.0 | USB-Device | シリアルデバッグやファームウェアのフラッシュなどに使用します。 |
| Type-A | *2 | USB2.0 | USB-Host | フラッシュドライブ、USB キーボード、マウスなど、さまざまな USB デバイスを接続します。 |
USB ハブが検出されているか確認するには、lsusb コマンドを実行します。このコマンドは、ハブを含むすべての接続された USB デバイスを一覧表示します。
lsusb

このコマンドを実行すると、接続されている USB ハブを含め、システムに接続された USB デバイスに関する情報が表示されます。
USB ハブが正常に動作している場合、lsusb コマンドの出力にその詳細が表示されるはずです。表示されない場合は、ハブまたはシステムへの接続に問題がある可能性があります。そのような場合は、USB ハブやその接続のトラブルシューティングを行う必要があります。
SIM スロット
reComputer R1225 では、産業用途で一般的に使用される標準サイズの SIM カードスロットを採用しており、25mm x 15mm の標準 SIM カードが必要です。
reComputer R1225 には 4G バージョンがあります。標準版(4G モジュールなし)を購入した場合は、4G モジュールを別途購入して取り付けることができます。Bazaar Mall では現在、2 種類の 4G モジュールを提供しています:ヨーロッパ向け(EMEA およびタイ向け SKU 113991135)とアメリカ向け(北米向け SKU 113991134)
SSD スロット
reComputer R1225 の SSD スロットは、容量が 128GB、256GB、512GB、1TB の NVMe M.2 2280 SSD を搭載できるように設計されています。このスロットにより、高速なストレージ拡張が可能となり、システムの性能と容量を向上させることができます。
SSD を含むディスクを一覧表示するには、fdisk -l コマンドを使用できます。手順は次のとおりです:
sudo fdisk -l
このコマンドは、システムに接続されているすべてのディスクの一覧を表示し、正しく認識されていれば SSD も含まれます。SSD を表すエントリを探してください。通常、/dev/sd に続いて文字が付きます(例:/dev/sda、/dev/sdb など)。 SSD に対応するエントリを特定したら、必要に応じてパーティション分割やフォーマットを実行できます。
SSD カードには主に 2 つの用途があります:
1.大容量ストレージ:SSD カードは大容量ストレージ用途に利用できます。
2.イメージを保持するブートドライブ:もう 1 つの用途は、SSD を大容量ストレージとして使用すると同時にシステムイメージを保存し、SSD カードから直接起動できるようにすることです。
市販されているすべての SSD カードが、2 番目の用途をサポートしているわけではない点に注意が必要です。そのため、ブートドライブとしての使用を検討していて、どのモデルを購入すべきか不明な場合は、弊社推奨の 1TB SSD(SKU 112990267)をお選びいただくことをおすすめします。このモデルはブート機能についてテストおよび検証済みのため、互換性問題のリスクを軽減し、試行錯誤にかかるコストを最小限に抑えることができます。
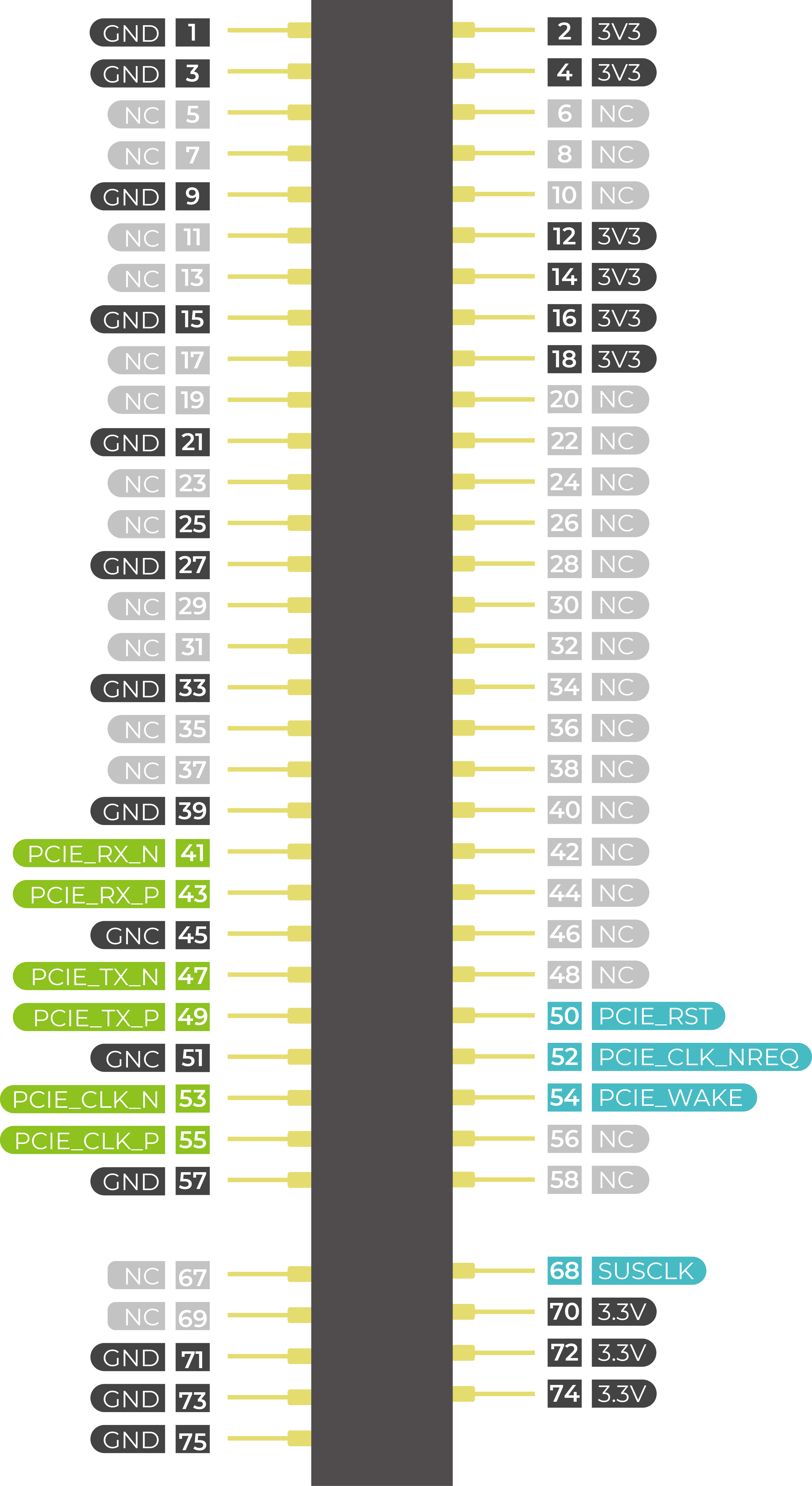
Mini-PCle スロット
| Slot | Supported Protocol |
|---|---|
| Mini-PCIe 1 | 4G LTE |
| Mini-PCIe 2 | SPI LoRa® |
reComputer R1225 には標準版と 4G 版があります。標準版では、Mini-PCIe 1 は空きスロットとなっています。4G 版では、Mini-PCIe 1 に 4G LTE があらかじめ搭載されています。
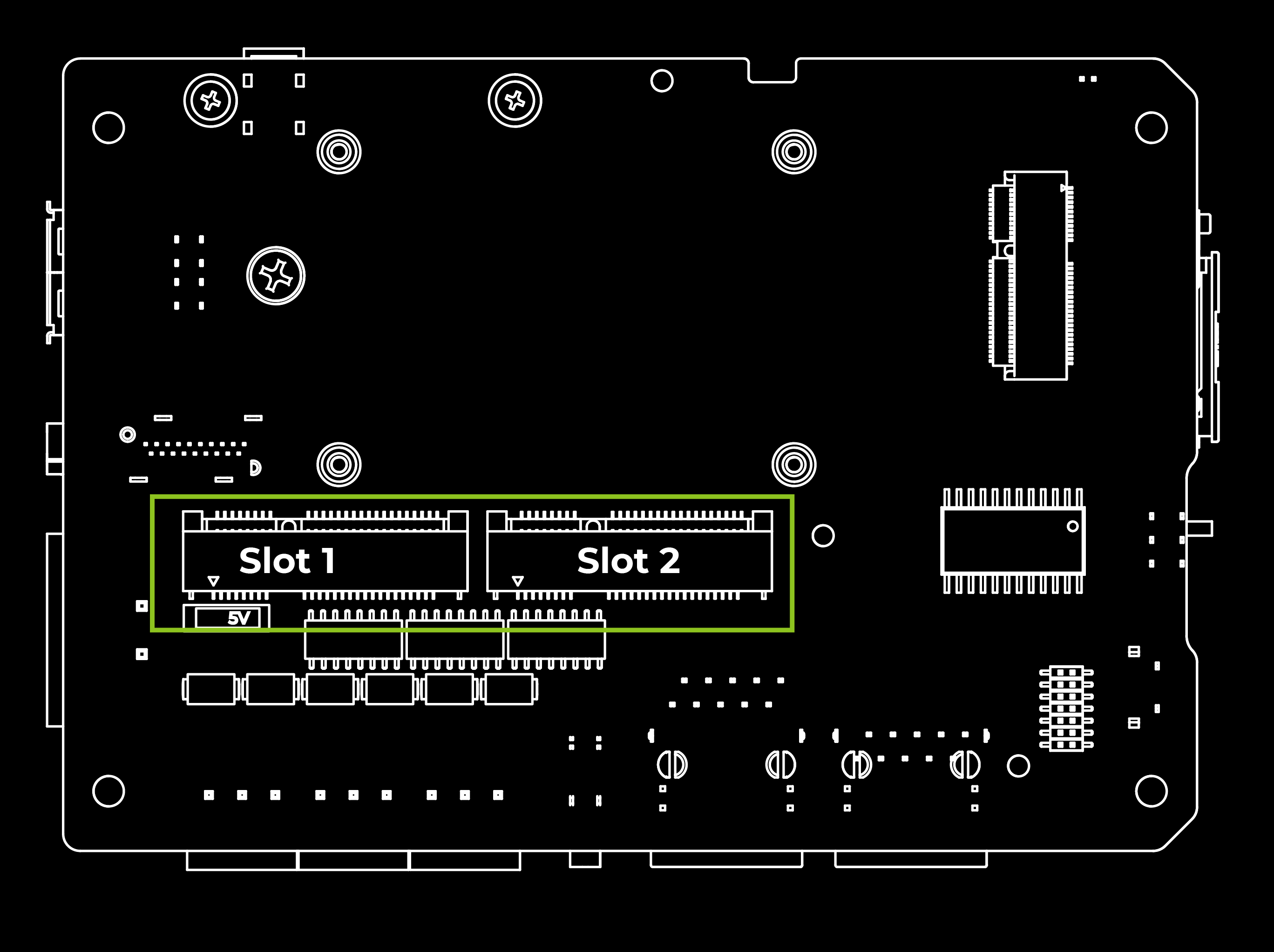
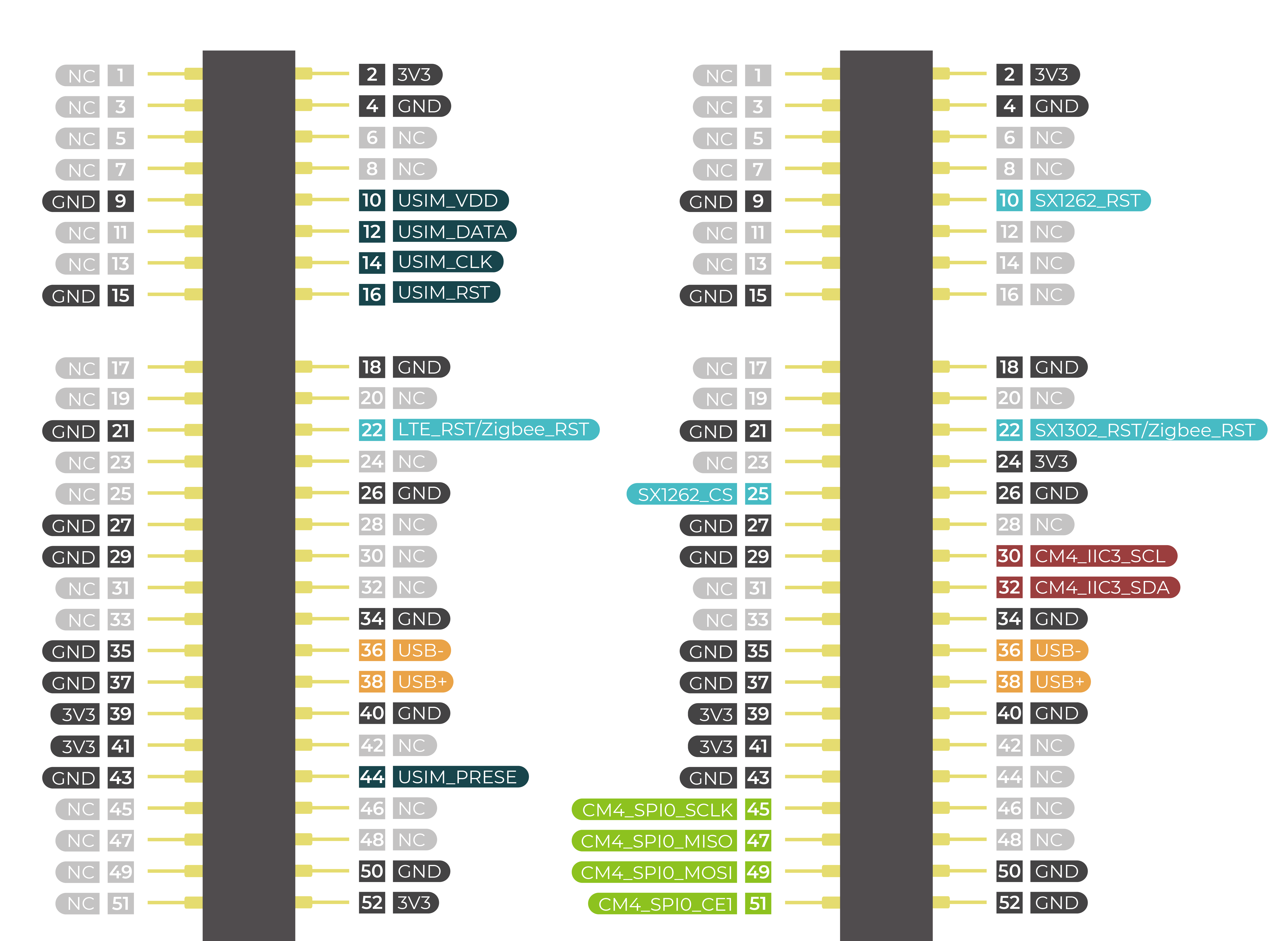
このデバイスには 2 つの Mini-PCIe インターフェース、すなわち Mini-PCIe スロット 1 と Mini-PCIe スロット 2 が搭載されています。スロット 1 は SIM カードスロットに接続され、USB プロトコルをサポートします。一方、スロット 2 は USB と SPI の両プロトコルをサポートしますが、SIM カードスロットには接続されていません。そのため、4G LTE などのデバイスはスロット 1 に接続でき、SPI LoRa® デバイスはスロット 2 に接続できます。
リセットホール

reComputer R1225 のリセットホール内には Mini プッシュボタンスイッチが配置されています。細い物でこのボタンを押すことで、CM4 をリセットできます。このピンが High のときは CM4 が起動したことを示し、このピンを Low にするとモジュールがリセットされます。
Ethernet RJ45

| Name | Type | Speeds | PoE |
|---|---|---|---|
| ETH0 | CM4 native Gigabit Ethernet | 10/100/1000 Mbit/s | Pre-installed |
| ETH1 | Converted from USB | 10/100 Mbit/s | Not Supported |
reComputer R1225 には 2 つの Ethernet RJ45 ポートが搭載されています。ETH0 は CM4 ネイティブの Gigabit Ethernet インターフェースで、10/100/1000 Mbit/s の 3 種類の速度をサポートします。PoE モジュールを追加購入することで、このインターフェース経由で power-over-Ethernet(PoE)給電を有効にし、reComputer R1225 に電力を供給できます。もう一方の ETH1 は USB から変換されたインターフェースで、10/100 Mbit/s をサポートします。
HDMI
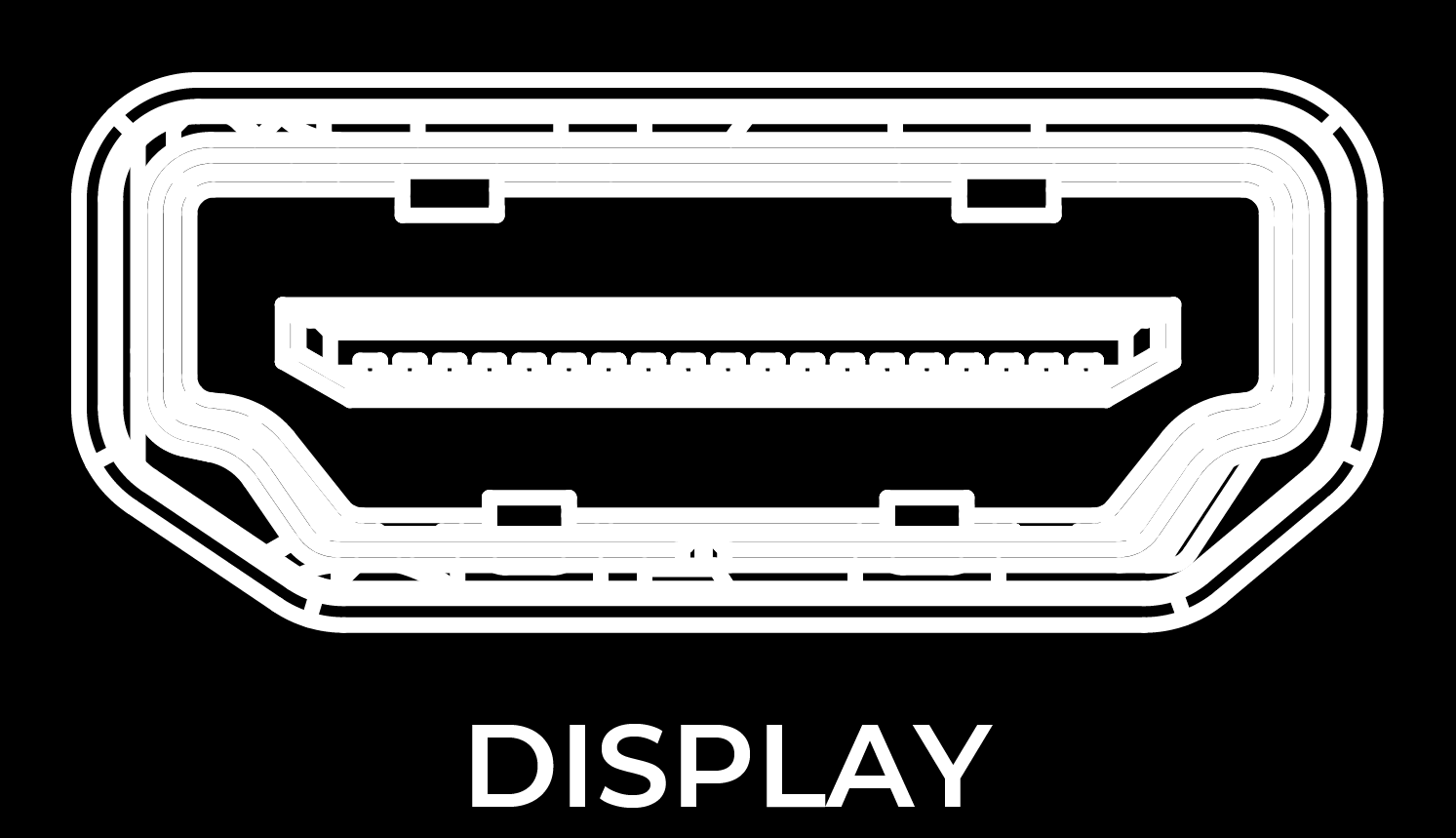
reComputer R1225 は CM4 からのネイティブ HDMI インターフェースを備えており、最大 4K @ 60 fps のビデオ出力をサポートします。複数ディスプレイを必要とするアプリケーションに最適で、外部の大型スクリーンにコンテンツを出力することができます。
RTC
reComputer R1225 には RTC 回路が搭載されており、CR2032 バッテリーがあらかじめ装着されています。そのため、電源が失われた場合でも時刻保持機能を維持することができます。
リアルタイムクロック(RTC)機能をテストするには、次の手順に従います:
- 自動時刻同期を無効にします:
sudo systemctl stop systemd-timesyncd
sudo systemctl disable systemd-timesyncd
- 時刻を 2024 年 3 月 20 日 12:00 PM に設定します:
sudo hwclock --set --date "2024-03-20 12:00:00"
- RTC の時刻をシステムに同期します:
sudo hwclock --hctosys
- RTC の時刻を確認します:
sudo hwclock -r
このコマンドは、RTC に保存されている時刻を読み出して表示します。 5. RTC の電源を切り、数分待ってから再度接続し、RTC の時刻が正しく保持されているかを確認します。
ウォッチドッグ
reComputer R1225 には独立したハードウェアウォッチドッグ回路が搭載されており、システムが異常クラッシュした場合に自動的にシステムを再起動します。ウォッチドッグ回路は RTC によって実装されており、1 ~ 255 秒の柔軟な給餌時間を設定できます。
ウォッチドッグテストを行うには、次の手順に従います:
- ウォッチドッグソフトウェアをインストールします:
sudo apt install watchdog
- ウォッチドッグの設定ファイルを編集します:
# make sure you install vim already, if haven't, can install by the command below
sudo apt-get install vim
sudo vim /etc/watchdog.conf
設定を次のように変更します:
watchdog-device = /dev/watchdog
# Uncomment and edit this line for hardware timeout values that differ
# from the default of one minute.vi
watchdog-timeout = 120
# If your watchdog trips by itself when the first timeout interval
# elapses then try uncommenting the line below and changing the
# value to 'yes'.
#watchdog-refresh-use-settimeout = auto
# If you have a buggy watchdog device (e.g. some IPMI implementations)
# try uncommenting this line and setting it to 'yes'.
#watchdog-refresh-ignore-errors = no
# ====================== Other system settings ========================
#
# Interval between tests. Should be a couple of seconds shorter than
# the hardware time-out value.
interval = 15
max-load-1 = 24
#max-load-5 = 18
#max-load-15 = 12
realtime = yes
priority = 1
必要に応じて、他の設定を調整することもできます。 3. ウォッチドッグサービスが実行中であることを確認します:
sudo systemctl start watchdog
- ウォッチドッグ機能をテストするには、次のコマンドを実行してシステムハングを模擬します:
sudo su
echo 1 > /proc/sys/kernel/sysrq
echo "c" > /proc/sysrq-trigger
このコマンドはカーネルクラッシュを引き起こし、ウォッチドッグによってシステムが再起動されるはずです。
- 指定したタイムアウト時間後にシステムが再起動することを確認します。 これらの手順により、システム上のウォッチドッグタイマーの動作をテストし、機能を確認することができます。
オプションインターフェースおよびモジュール
Wi-Fi/BLE(同梱)
reComputer R1225 は、オンボード Wi-Fi/BLE バージョンの CM4 を搭載しており、Wi-Fi/BLE パラメータは CM4 と同一です。詳細なパラメータ情報については、Raspberry Pi 公式サイトを参照してください。
reComputer R1225 の筐体は金属製であるため、Wi-Fi/BLE の電波が金属外装を通過しにくい場合があります。そのため、この機能が必要な場合は、弊社が用意した外付けアンテナを取り付けることをおすすめします。
Wi-Fi に接続する
Luci UI 経由で Wi-Fi に接続
コマンドで Wi-Fi に接続
step1. Wi-Fi ネットワークをスキャンします:
nmcli dev wifi list
step2. Wi-Fi ネットワークに接続します:
sudo nmcli dev wifi connect network-ssid password "network-password"
sudo nmcli --ask dev wifi connect network-ssid
step3. デバイスの電源投入後、自動的に Wi-Fi に接続されます。
保存されている Wi-Fi 情報を削除したい場合:
nmcli con del network-ssid
接続が切断されたら、別の Wi-Fi に接続します。
Bluetooth デバイスに接続する
Bluetooth デバイスを追加する前に、コンピュータ上で Bluetooth サービスが起動して動作している必要があります。systemctl コマンドで確認できます。
sudo systemctl status bluetooth
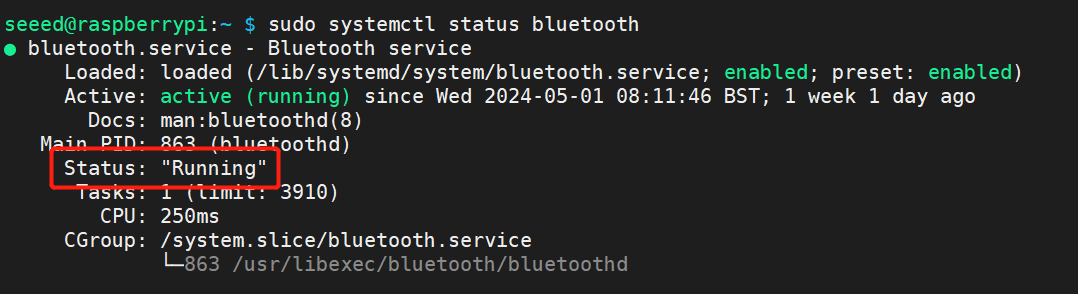
Bluetooth サービスのステータスが active でない場合は、まず有効化する必要があります。その後、デバイス起動時に自動的に開始されるようサービスを開始します。
sudo systemctl enable bluetooth
sudo systemctl start bluetooth
bluetoothctl ツールを使用して Bluetooth に接続および管理できます。以下はいくつかの一般的なコマンドと説明です:
#Scan attachments to the device
bluetoothctl scan on
#To make your Bluetooth adapter discoverable to other devices, use the following command:
bluetoothctl discoverable on
#Replace A4:C1:38:F4:83:2E below with the Media Access Control (MAC) address you want to connect to
#Pair a new Bluetooth device
bluetoothctl pair A4:C1:38:F4:83:2E
#Connect previously paired devices
bluetoothctl connect A4:C1:38:F4:83:2E
#View the list of devices paired with the system
bluetoothctl paired-devices
#When a Bluetooth device is trusted, the system automatically connects to it after discovering it
bluetoothctl trust A4:C1:38:F4:83:2E
#Cancel trust
bluetoothctl untrust A4:C1:38:F4:83:2E
#Remove a paired Bluetooth device
bluetoothctl remove A4:C1:38:F4:83:2E
#Disconnect the Bluetooth connection, but do not remove it from the paired list
bluetoothctl disconnect A4:C1:38:F4:83:2E
#Block specific devices from connecting to your system
bluetoothctl block A4:C1:38:F4:83:2E
#Unblock device
bluetoothctl unblock A4:C1:38:F4:83:2E
#Use interactive mode and exit
bluetoothctl
exit
4G モジュール(オプション)
reComputer R1225 LoRaWAN Gateway には Standard バージョンと 4G バージョンがあります。Standard バージョンでは Mini-PCIe スロット 1 は空いていますが、4G バージョンにはあらかじめ Mini-PCIe モジュールが搭載されており、ヨーロッパ(EMEA & Thai SKU 113991135)およびアメリカ(北米 SKU 113991134)向けにそれぞれ最適化されています。
LoRa® モジュール(同梱)
reComputer R1225 LoRaWAN Gateway の Mini-PCIe スロット 2 には、SPI LoRa® モジュールが装着されています。
PoE(同梱)
reComputer R1225 LoRaWAN Gateway には PoE モジュールが搭載されており、ユーザーが自分で PoE モジュールを購入・はんだ付け・組み立てする必要がありません。
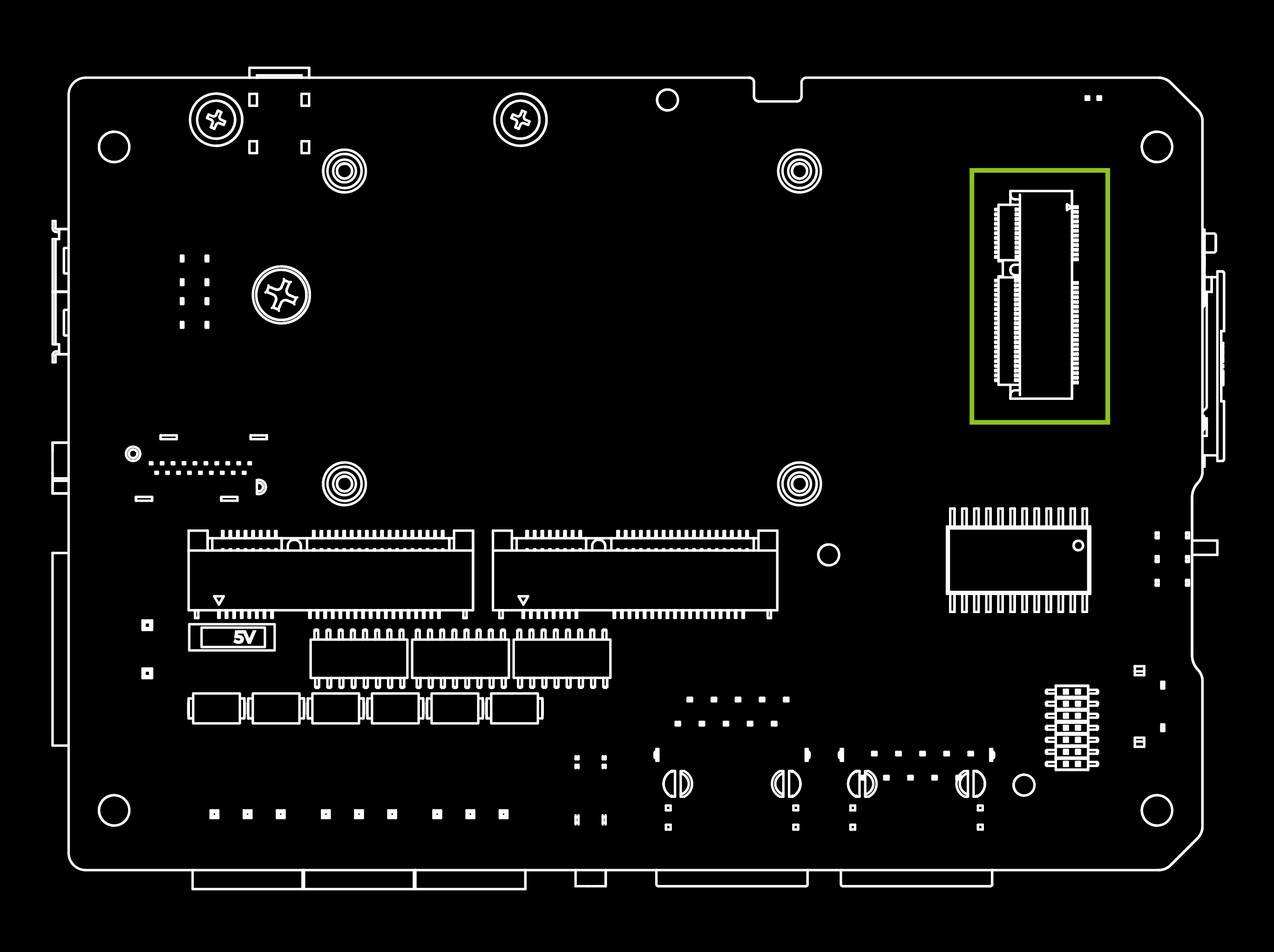
M.2 スロット(オプション)
reComputer R1225 は、基板上の 2 つの Mini-PCIe スロットの下にある PCIe スロット(J62)を使用することで、2280 NVMe SSD および AI アクセラレータ(Hailo)をサポートします。CM4 の PCIe は最大理論速度 5Gbps の Gen2.0 であることに注意してください。Gen3.0 以上の SSD を使用する場合、SSD の最大速度を発揮できない可能性があります。テストの結果、SSD 搭載の reTerminal DM は最大書き込み速度 230MB/s、最大読み出し速度 370MB/s を達成しました。どの SSD が互換性があるか不明な場合は、以下のアクセサリリストに従って購入することをおすすめします。
| SSD カード | NVMe M.2 2280 SSD 1TB | 112990267 |
| 512GB NVMe M.2 PCle Gen3x4 2280 内蔵 SSD | 112990247 | |
| 256GB NVMe M.2 PCle Gen3x4 2280 内蔵 SSD | 112990246 | |
| 128GB NVMe M.2 PCle Gen3x4 2280 内蔵 SSD | 112990226 |
次の点にご注意ください:
1- スピードテストの結果は、SSD のモデル、テスト方法、およびテスト環境によって異なる場合があります。ここで提供する値は Seeed のラボで取得した参考値です。
SSD カードには主に 2 つの用途があります:
1.大容量ストレージ:SSD カードは大容量ストレージ用途に使用できます。
2.イメージ付きブートドライブ:もう 1 つの用途は、SSD を大容量ストレージとして使用すると同時にシステムイメージを保存し、SSD カードから直接起動できるようにすることです。
市販されているすべての SSD カードが 2 番目の用途に対応しているわけではないことに注意してください。そのため、ブートドライブとして使用する予定で、どのモデルを購入すべきか分からない場合は、当社推奨の 1TB SSD(SKU [112990267]) をお選びいただくことをおすすめします。このモデルはブート機能についてテストおよび検証済みであり、互換性の問題のリスクを軽減し、試行錯誤にかかるコストを最小限に抑えることができます。
暗号化チップ TPM 2.0(オプション)
TPM には Infineon の OPTIGA™ TPM SLB9670 が採用されており、Trusted Computing Group(TCG)TPM 2.0 規格に準拠しています。これは reComputer R1225 用の暗号化チップとして推奨されています。このチップは基板上のポート J13 に接続される SPI インターフェースを備えており、プラットフォームの完全性のための信頼の起点(root of trust)、リモート認証、および暗号サービスを実現します。
TPM 2.0 モジュールをデバイスに接続した場合、以下のコードで TPM の接続状態を確認できます。
ls /dev | grep tpm
出力に tpm0 および tpmrm0 が表示されている場合、TPM(Trusted Platform Module)デバイスがシステム上で検出され、利用可能であることを意味します。これは TPM ハードウェアが認識されアクセス可能であることを示しており、良好な状態です。TPM 関連の機能やアプリケーションを、デバイスが存在しアクセス可能であることを前提に利用することができます。
UPS(同梱)
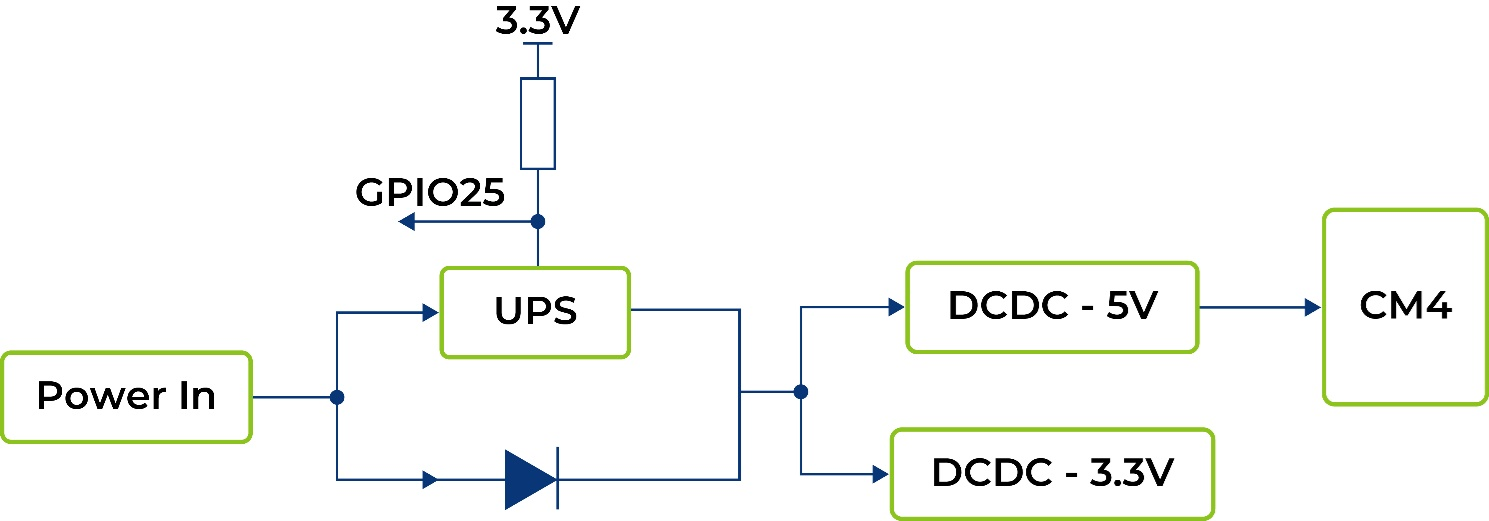
UPS は 7F 仕様で、直列構成で動作します。UPS モジュールは DC5V と CM4 コンポーネントの間に配置されており、GPIO 信号を使用して 5V 電源が喪失した場合に CPU に警告を発します。CPU はこの信号を受信すると、スーパーキャパシタのエネルギーが枯渇する前に緊急スクリプトを実行し、"$ shutdown" コマンドを実行します。
UPS によって提供されるバックアップ時間は、システム負荷に大きく依存します。以下は、4GB RAM、32GB eMMC ストレージ、Wi-Fi モジュールを搭載した CM4 モジュールでテストした代表的なシナリオです。
| 動作モード | 時間(秒) | 備考 |
|---|---|---|
| Idle | 37 | 公式ドライバプログラムをロードしたアイドル状態でのテスト |
| CPU フルロード | 18 | stress -c 4 -t 10m -v & |
UPS 機能の詳細についてはお問い合わせください。また、アラーム信号はアクティブ Low です。
CPU と DC/AC 電源入力の間の GPIO25 は、5V 電源が切れたときに CPU へ警告を送るために使用されます。その後、CPU はスーパーキャパシタのエネルギーが尽きる前にスクリプト内で緊急処理を行い、$ shutdown を実行する必要があります。
この機能を利用する別の方法として、GPIO ピンの状態変化をトリガとしてシャットダウンを開始することができます。指定した GPIO ピンを KEY_POWER イベントを生成する入力キーとして設定します。このイベントは systemd-logind によって処理され、シャットダウンが開始されます。
/boot/overlays/README を参考にして、/boot/config.txt を修正してください。
dtoverlay=gpio-shutdown,gpio_pin=25,active_low=1
以下の Python コードは、GPIO25 を介してスーパーキャパシタ UPS の動作モードを検出し、システムの電源が切れた際に自動的にデータを保存してシャットダウンするデモです。
import RPi.GPIO as GPIO
import time,os
num = 0
GPIO.setmode(GPIO.BCM)
#set GPIO25 as input mode
#add 500ms jitter time for software stabilization
GPIO.setup(25,GPIO.IN,pull_up_down = GPIO.PUD_UP)
GPIO.add_event_detect(25,GPIO.FALLING, bouncetime = 500)
while True:
if GPIO.event_detected(25):
print('...External power off...')
print('')
os.system('sync')
print('...Data saving...')
print('')
time.sleep(3)
os.system('sync')
#saving two times
while num<5:
print('-----------')
s = 5-num
print('---' + str(s) + '---')
num = num + 1
time.sleep(1)
print('---------')
os.system('sudo shutdown -h now')
DSI(オプション)
1 つの DSI(J24)が基板上に予備として用意されており、特殊用途向けに使用できます。ユーザーは自身のニーズに応じてプラグインを購入する必要があります。
追加リソース
技術サポート & 製品ディスカッション
当社製品をお選びいただきありがとうございます。お客様が当社製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートをご用意しています。お好みやニーズに応じて選べる複数のコミュニケーションチャネルを提供しています。