reComputer AI R2000 シリーズ入門ガイド

reComputer AI R2000 シリーズは、Raspberry Pi 5 をベースにした高性能なエッジ AI コンピュータです。クアッドコア Arm Cortex-A76 プロセッサ、8GB RAM、M.2 SSD 対応、最大 26 TOPS を提供する Hailo-8 AI アクセラレーションモジュールを搭載し、リアルタイムで低レイテンシかつ高効率な AI 推論を実現します。AI 搭載ビデオ解析、マシンビジョン、インテリジェントエッジコンピューティングなど、幅広い AI アプリケーションに最適な選択肢です。
特長
-
強力な冷却性能: コンパクトな設計と最適化された熱設計により、リソースに制約のある環境への展開に非常に適しており、優れた冷却性能を提供します。
-
高いパフォーマンス: クアッドコア Cortex-A76 CPU と最大 8GB RAM を備えた Raspberry Pi 5 を搭載。
-
毎秒 26 兆回の演算性能: Hailo AI アクセラレータにより、最大 26 TOPS の統合コンピューティングパワーを提供します。 豊富なインターフェース: 2x HDMI 4Kp60、1x Ethernet ポート、2x USB 3.0、2x USB 2.0。
-
ワイヤレス接続: デュアルバンド Wi-Fi と Bluetooth 5.0/BLE。 柔軟なストレージオプション: PCIe2.0 デュアル M.2 スロットは、AI アクセラレータと SSD ストレージの両方をサポートします。
仕様
| パラメータ | 説明 |
|---|---|
| ハードウェア仕様 | |
| CPU | Raspberry Pi 5、2.4GHz クアッドコア 64 ビット Arm Cortex-A76 |
| GPU | Raspberry Pi 5、VideoCore VII |
| AI プロセッサ | Hailo-8 M.2 アクセラレーションモジュール、毎秒 26 兆回の演算性能 |
| RAM | 8GB SDRAM |
| オペレーティングシステム | Raspberry Pi OS、Ubuntu |
| システム仕様 | |
| 電源 | 5V/5A DC 電源(USB-C 経由)、Power Delivery 対応 |
| ビデオデコーダ | 4Kp60 HEVC デコーダ |
| Wi-Fi | デュアルバンド 802.11ac Wi-Fi® |
| Bluetooth | Bluetooth 5.0/ BLE |
| 電源ボタン | On/Off を搭載 |
| インターフェース | |
| ストレージ | 1 x microSD カードスロット、高速 SDR104 モード対応 |
| M.2 スロット | 2 x M.2 スロット、M.2 NVMe SSD/Hailo M.2 アクセラレーションモジュール対応 |
| USB ポート | 2 × USB 3.0 ポート |
| 2 × USB 2.0 ポート | |
| Ethernet | 1 x 10/100/1000 Mbps |
| カメラ/ディスプレイ | 2 × 4 レーン MIPI カメラ/ディスプレイトランシーバ |
| ディスプレイ出力 | 2 x micro HDMI ポート (4Kp60) |
| 動作環境 | |
| 保護等級 | IP40 |
| 動作温度 | 0-45°C |
| その他 | |
| 保証 | 1 年 |
| 製品ライフタイム | 少なくとも 2036 年 1 月まで |
| 認証 | CE、FCC、Telec、RoHS、REACH |
Hailo の紹介
ハードウェアの紹介
Hailo は、エッジデバイス上での高性能ディープラーニングアプリケーション向けに特化した最先端の AI プロセッサを提供しています。同社のソリューションは、高度な AI アクセラレータとビジョンプロセッサによって支えられた、エッジにおける次世代の生成 AI に加え、認識およびビデオ強調を実現することに重点を置いています。そして、26 TOPs の AI 性能を提供する Hailo-8 NPU アクセラレータを搭載した reComputer_R2000 は、YOLOv8s で 200 FPS 超を達成することが可能です。
ソフトウェアの紹介
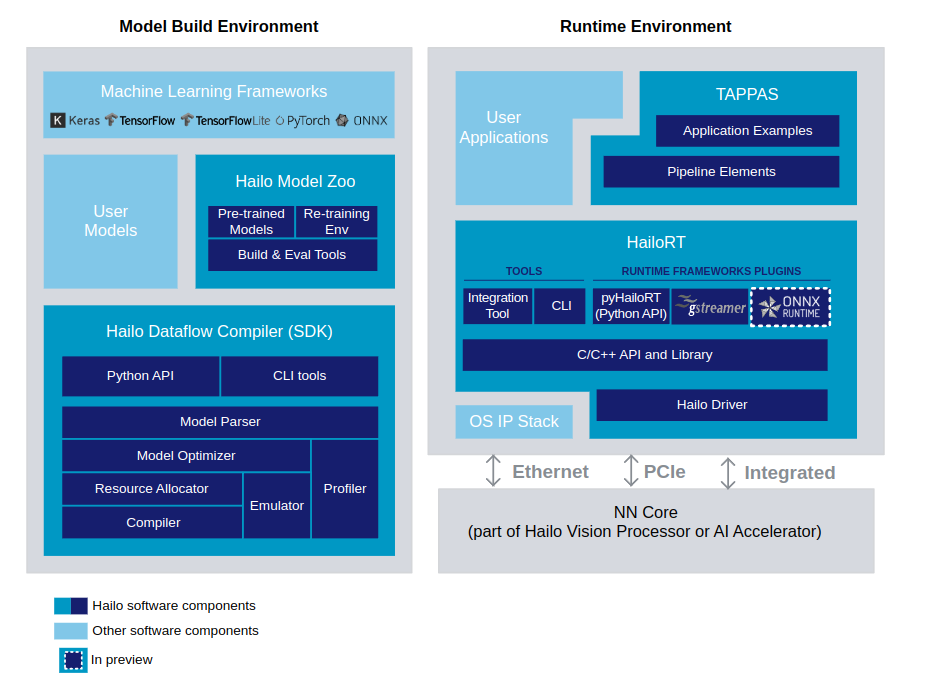
Hailo AI Software Suite は、ハードウェアアクセラレータ上で AI モデルを効率的に実行するための強力なツールを提供します。既存のディープラーニングフレームワークとシームレスに統合できるよう設計されており、開発者にスムーズなワークフローを提供します。このプロセスでは、まず Model Build Environment で ONNX ファイルから HEF(Hailo 実行バイナリファイル)を生成します。作成された HEF ファイルは推論マシン(Runtime Environment)に転送され、そこで HailoRT API を用いて推論を実行するために使用されます。提供されているスクリプトは、Model Build Environment 内で ONNX ファイルを HEF ファイルに変換する作業を支援します。
Note: Hailo NPU の使用例についてさらに知りたい場合は、この リンク をクリックしてください。
ハードウェア概要


OS の書き込み
SD カードとカードリーダーが必要です。SD カードをカードリーダーに挿入し、カードリーダーの USB インターフェースをホストマシンの USB ポートに接続します。
Windows ホストコンピュータの場合
-
Step 1. ここ をクリックして、以下の手順で使用する Windows 版 Raspberry Pi Imager 2.0.7 を直接ダウンロードするか、公式サイト にアクセスして、お使いのシステムに適したバージョンを選択します。
-
Step 2. Raspberry Pi Imager ソフトウェアを開きます
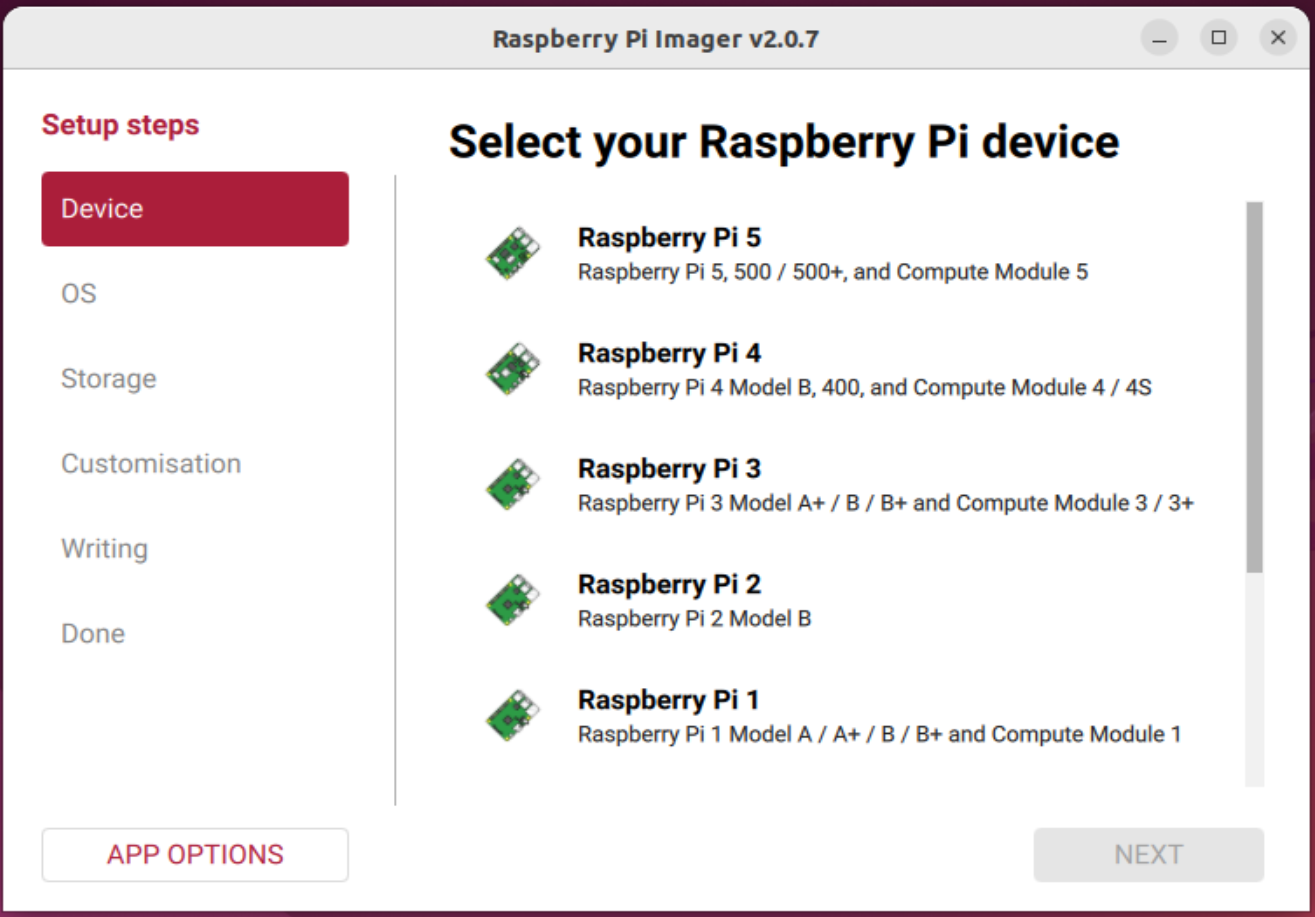
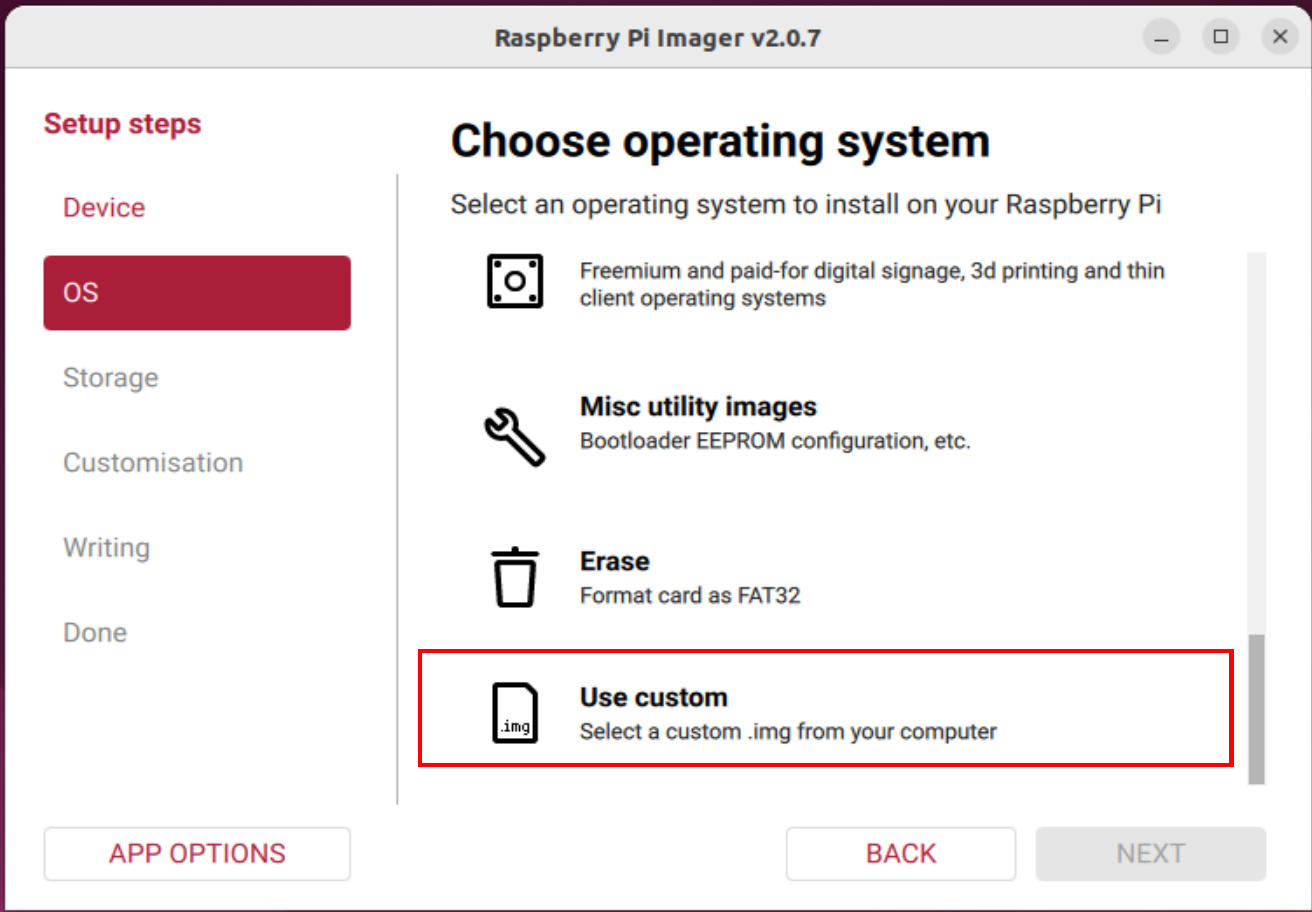
- Step 3. CHOOSE OS をクリックし、好みの OS を選択します
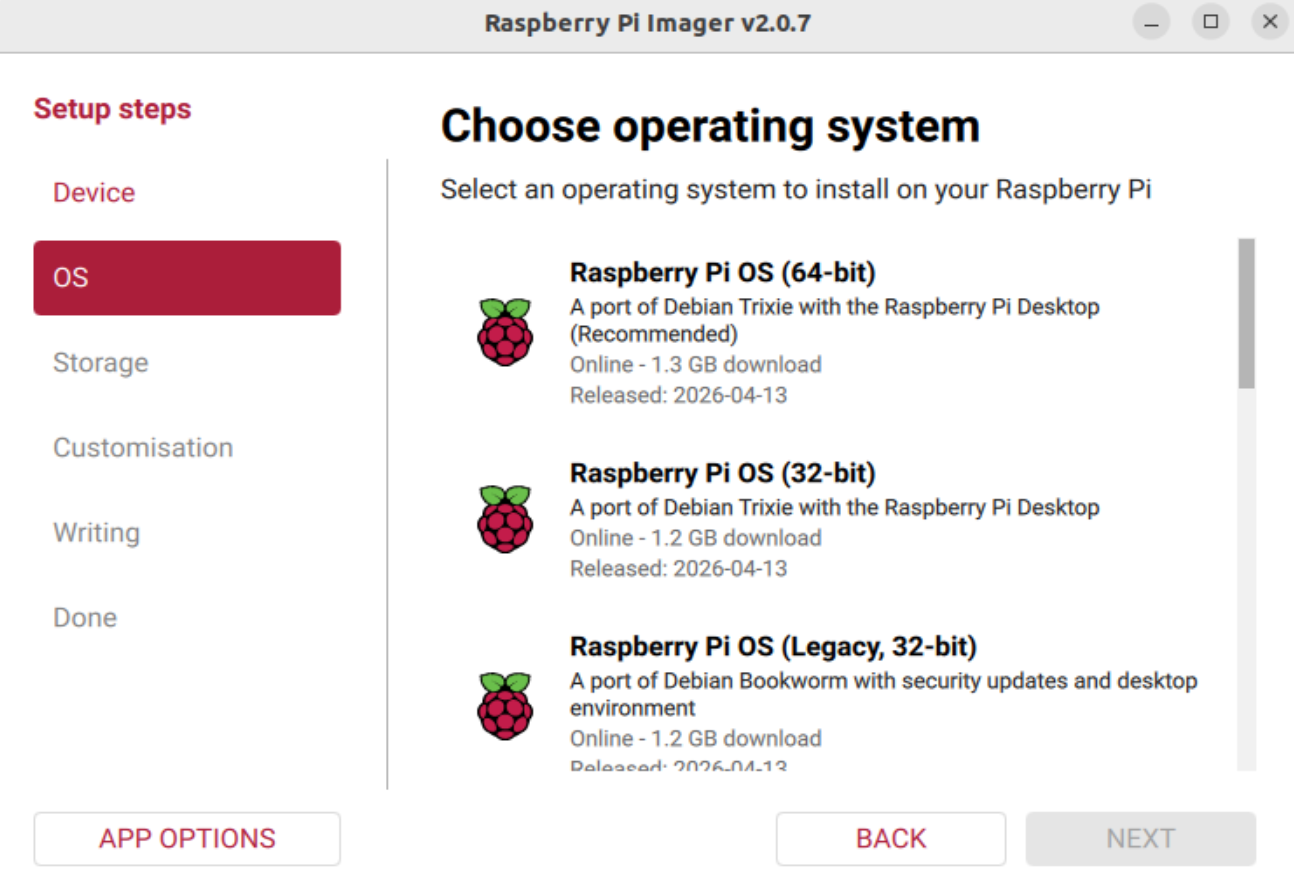
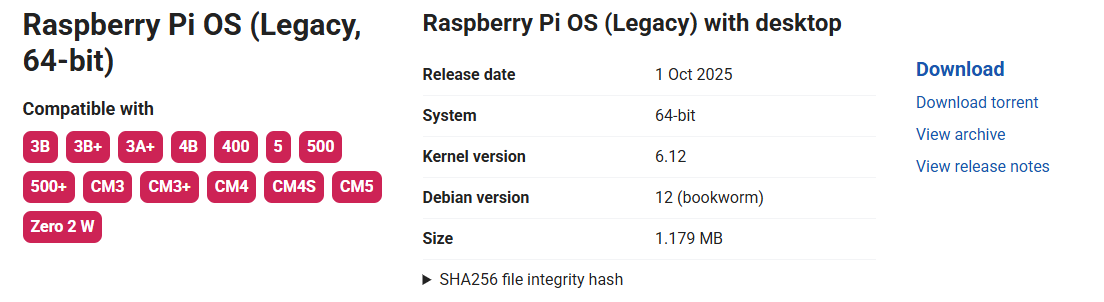
NOTE1: 現時点では、64-bit Raspberry Pi OS Debian 12 Bookworm イメージを書き込むことを推奨します。新しくリリースされた Debian 13 “Trixie” ベースの Raspberry Pi OS では、まだ hailo-all パッケージが更新されていないため、Bookworm を使用することで、箱から出してすぐに Hailo をフルサポートできます。 ダウンロード link。
その後、imager の Use custom オプションを使用して、SD カードに書き込みます。
それでも最新のイメージを試したい場合は、ワンコマンドの hailo-all ルートを使用する代わりに、Hailo ソフトウェアを手動でインストールする必要があります。 この リンク に従ってください。
NOTE2: Other general purpose OS に進むことで、64-bit Ubuntu など他の OS を選択できます
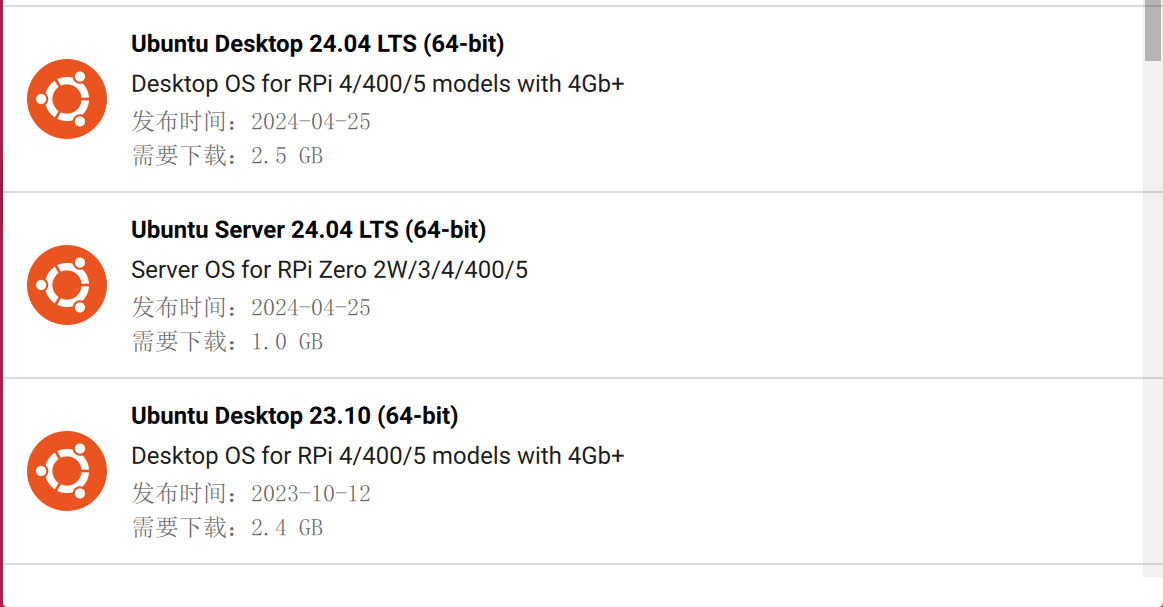
または、このリンクを使用してイメージファイルをダウンロードすることもできます:
- Step 4. STORAGE をクリックし、OS の書き込み用に用意したターゲットストレージデバイスを選択します。
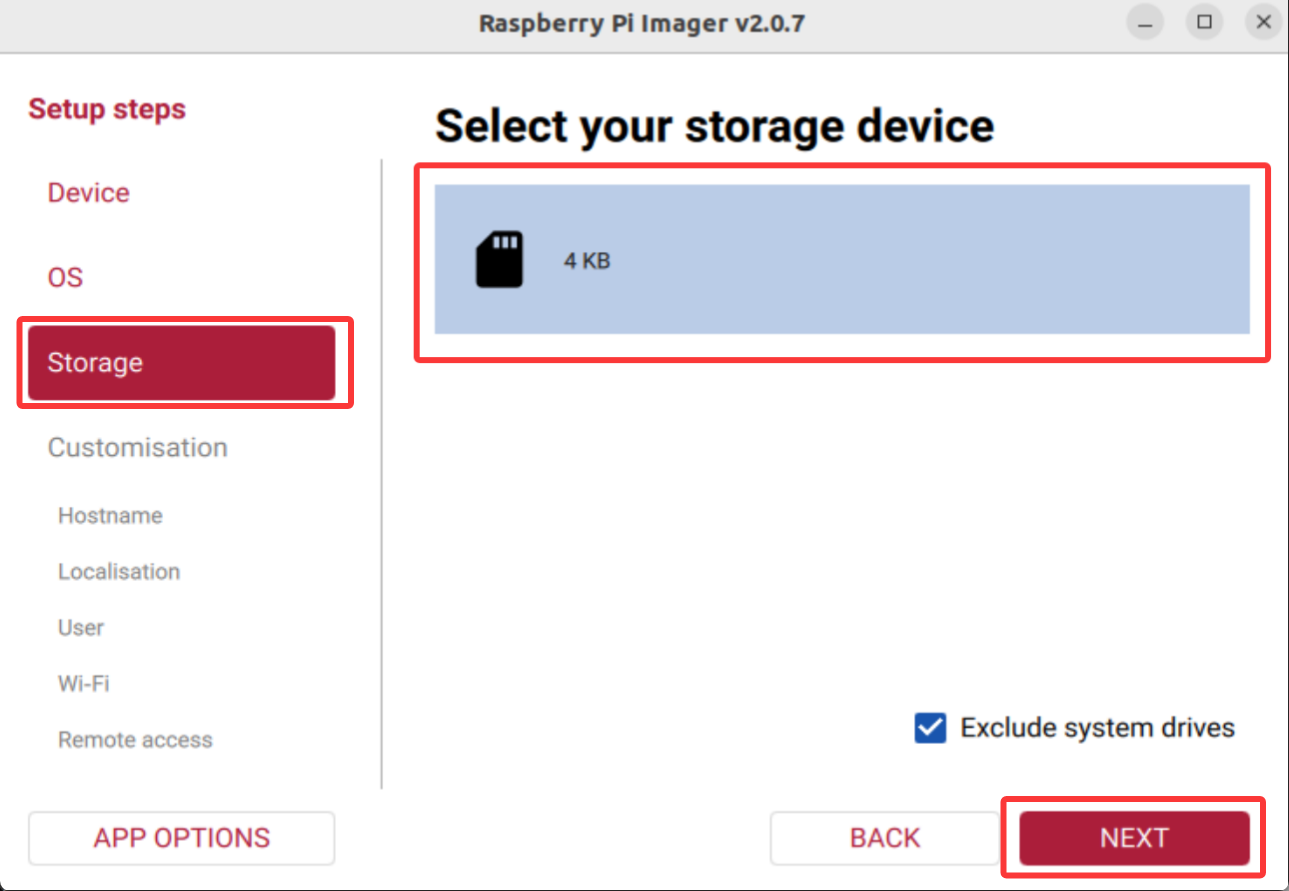
- Step 5. 最後に WRITE をクリックします
フラッシュ処理が完了するまで、数分お待ちください。
- Step 6. M.2 Dual Hat ドライバの修正
書き込み済みの SD カードを reComputer に挿入し、起動します。Fix M.2 Dual Hat Driver の手順に従ってください。
MAC ホストコンピュータの場合
以下の手順を進める前に、homebrew をインストールする必要があります。
ターミナルを開き、brew -V と入力して、正しく homebrew 環境がセットアップされているか確認してください。インストールされている homebrew 環境のバージョンが表示されるはずです。
-
Step 1. this link にアクセスして、Raspberry Pi Imager アプリケーションをダウンロードしてインストールします
-
ステップ 2. Raspberry Pi Imager アプリケーションを開きます

- ステップ 3. キーボードで CTRL + SHIFT + X を押して Advanced options ウィンドウを開きます

ここでは、ホスト名の設定、SSH の有効化、パスワードの設定、Wi-Fi の設定、ローカル設定 などを行うことができます
- ステップ 4. CHOOSE OS をクリックして、希望する OS を選択します

注意: Other general purpose OS に移動することで、64-bit Ubuntu などの他の OS を選択できます
または、このリンクを使用してイメージファイルをダウンロードできます:
-
ステップ 5. CHOOSE STORAGE をクリックします
-
ステップ 6. 最後に WRITE をクリックします

- ステップ 7. M.2 Dual Hat ドライバを修正します
書き込み済みの SD カードを reComputer に挿入して起動します。Fix M.2 Dual Hat Driver の手順に従ってください。
Linux ホストコンピュータの場合
- ステップ 1. snap をダウンロードします
sudo apt install snap
- ステップ 2. rpi-imager をダウンロードします
snap install rpi-imager
- ステップ 3. Raspberry Pi Imager ソフトウェアを開きます
rpi-imager
結果は次のように表示されます:

- ステップ 4. キーボードで CTRL + SHIFT + X を押して Advanced options ウィンドウを開きます
ここでは、ホスト名の設定、SSH の有効化、パスワードの設定、Wi-Fi の設定、ローカル設定 などを行うことができます
- ステップ 5. CHOOSE OS をクリックして、希望する OS を選択します
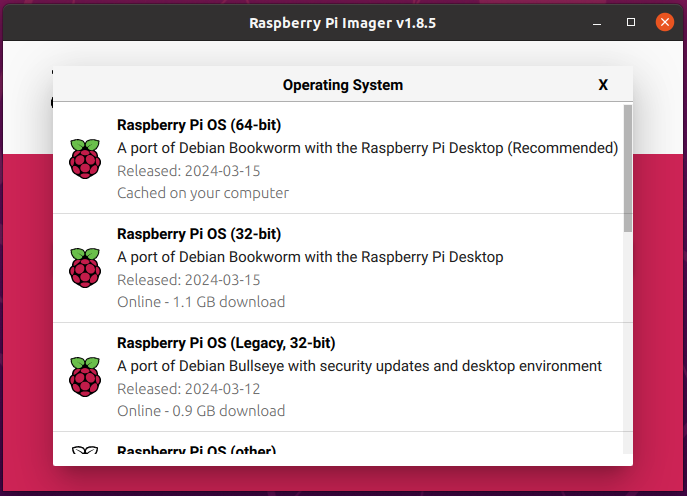
注意: Other general purpose OS に移動することで、64-bit Ubuntu などの他の OS を選択できます
または手動ダウンロードリンクを使用します: Ubuntu24.04 for Raspberry-Pi
-
ステップ 6. CHOOSE STORAGE をクリックし、接続されている eMMC ドライブを選択します
-
ステップ 7. 最後に NEXT と YES をクリックします

フラッシュ処理が完了するまで数分お待ちください。 結果は次のように表示されます:

- ステップ 8. M.2 Dual Hat ドライバを修正します
書き込み済みの SD カードを reComputer に挿入して起動します。Fix M.2 Dual Hat Driver の手順に従ってください。
NVME からの起動
EEPROM の更新
この方法は、SD カードを使用してデバイスを正常に起動できている場合に有効です。システムが最新の Raspberry Pi システム(Bookworm 以降)であり、RPi 5 のファームウェアが 2023-12-06(12 月 6 日)以降に更新されていることを確認してください。そうでない場合、NVME 関連の設定を認識しない可能性があります。
ステップ 1: Raspberry Pi システムが最新(Bookworm 以降)であることを確認し、次のコマンドを入力して RPi 5 ファームウェアを更新します:
sudo apt update && sudo apt upgrade -y
sudo rpi-eeprom-update # If it is not post-December 2023 type the following into a terminal to start the configuration tool
sudo raspi-config
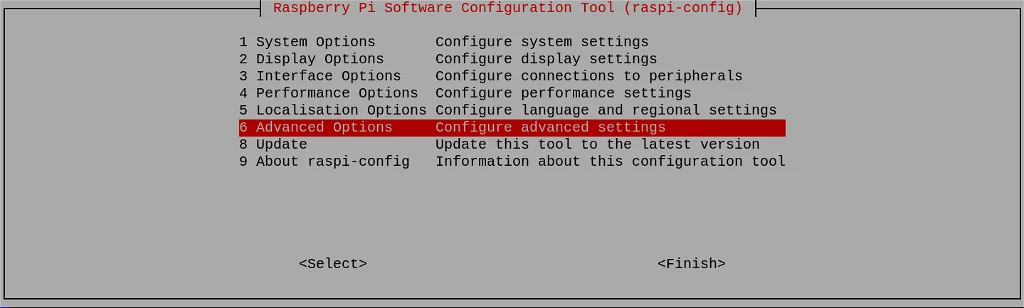
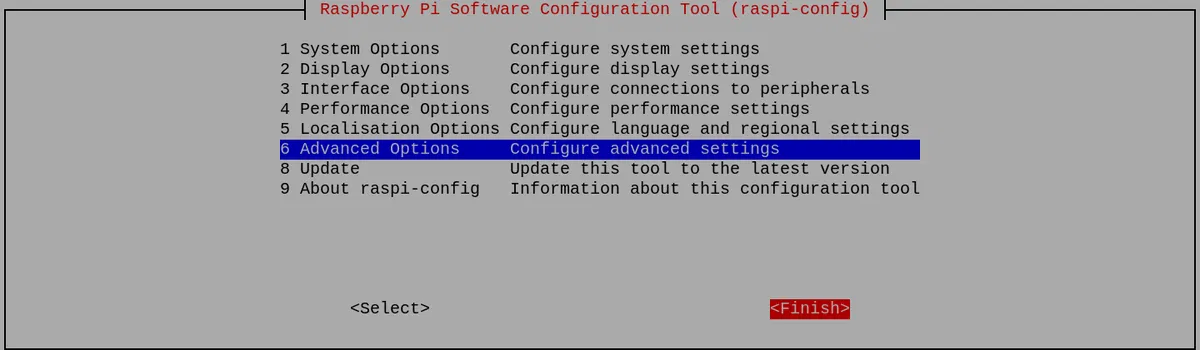
Advanced Options までスクロールして Enter を押します:
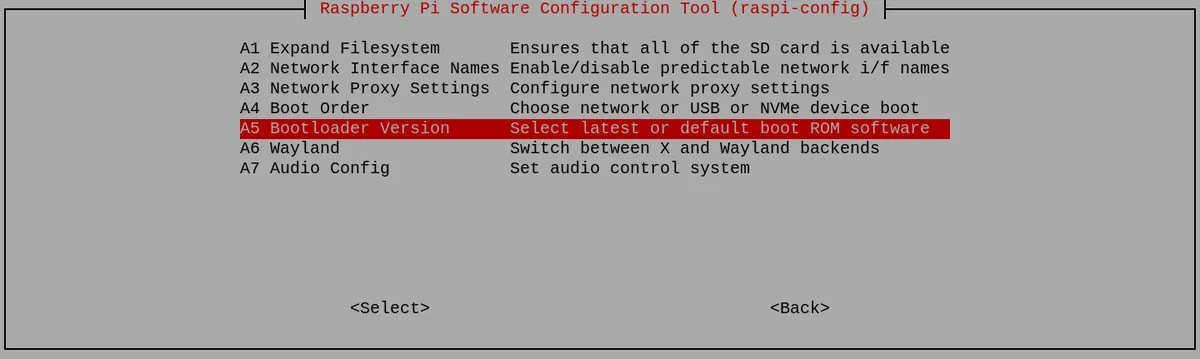
Bootloader Version までスクロールして Enter を押します:
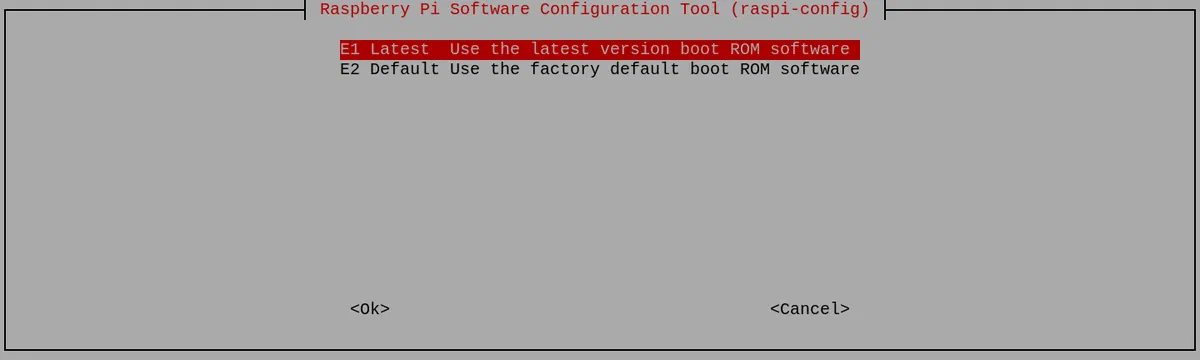
最後に Latest を選択し、Enter を押します:
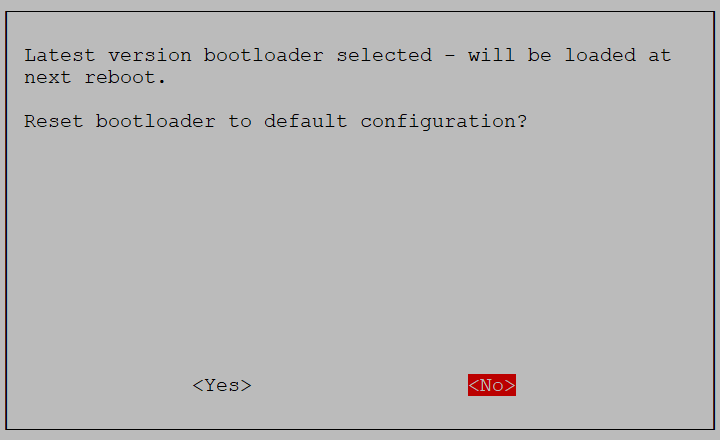
ここでは No を選択します - latest ブートローダーを使用したいからです。
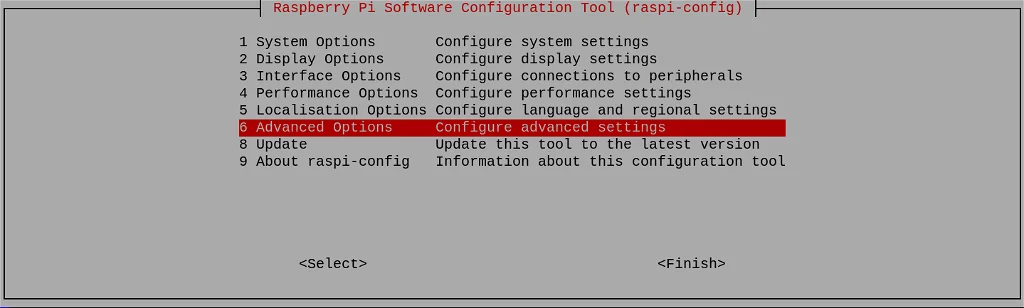
そして Finish を選択してツールを終了します:
再起動を求められた場合は、Yes を選択します。
ステップ 2:メイン画面で Applications => Accessories => SD Card Copier をクリックし、SD Card Copier プログラムを実行して、下図のように OS を NVME SSD にコピーします。
Raspberry Pi を NVMe SSD から起動するように設定する
SD カードスロットに簡単にアクセスできる場合は、Pi の電源を切り、SD カードを取り外すことで、次回起動時に(すべてが期待どおりに動作していれば)自動的に NVMe ドライブから起動します。SD カードをそのまま挿した状態で NVMe から起動したい場合は、ブート順を変更する必要があります。
ステップ 1: 次のコマンドを入力します:
sudo raspi-config
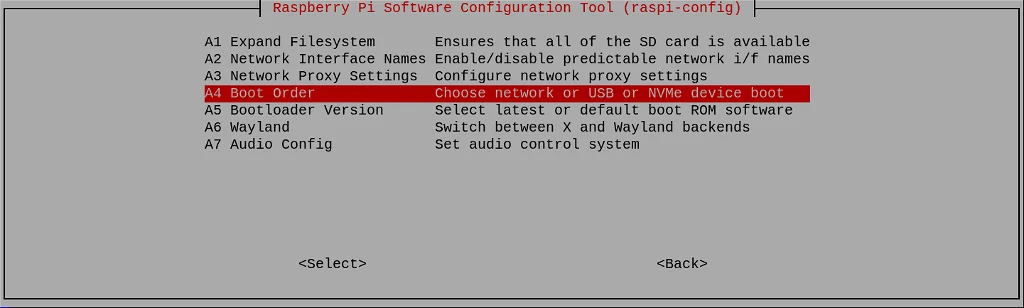
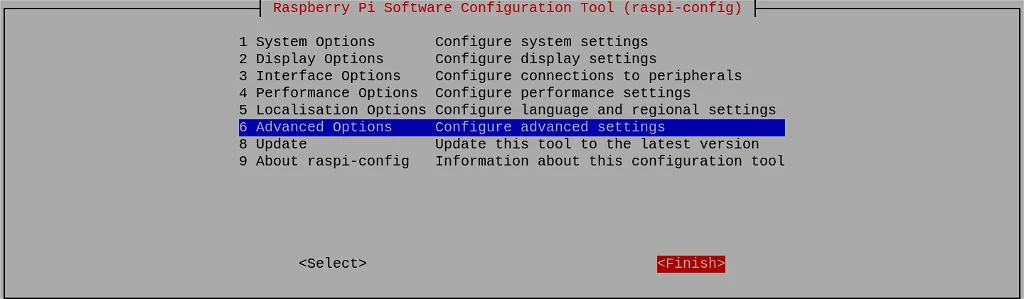
Advanced Options までスクロールして Enter を押します:
ステップ 2:Boot Order までスクロールして Enter を押します:
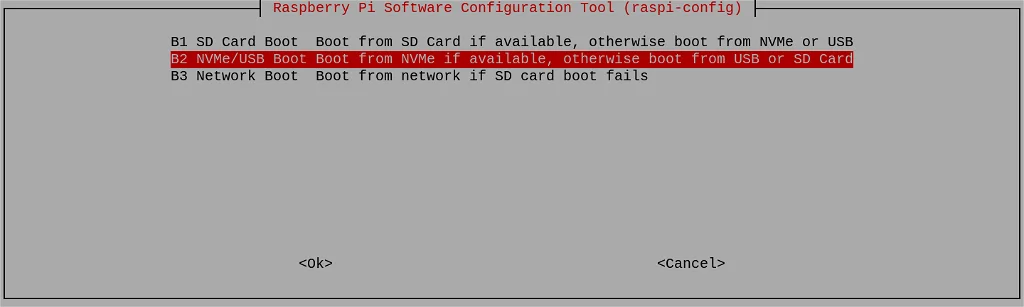
ステップ 3:NVMe/USB Boot を選択して Enter を押します:
設定内容が確認されます。Enter を押します:
ステップ 4:Back を選択するか Esc キーを押して最初の画面に戻ります。その後、カーソル右キーを使って Finish に移動します。
今すぐ再起動するかどうかを尋ねられます。Yes をクリックします:
ステップ 5:再起動後、Raspberry Pi は NVMe SSD から起動します。Fix M.2 Dual Hat Driver の手順に従って pcie-fix.dtbo オーバーレイをインストールし、M.2 Dual Hat ドライバを修正する必要があります。
Ubuntu を NVME にフラッシュする
最初に: SD カードで EEPROM を更新する
この リンク を参照してください。
NVMe のブート順を最優先に設定するには、次のコマンドを使用します:
sudo rpi-eeprom-config --edit
その後、次のように rpi-eeprom-config を変更します:
BOOT_UART=1
BOOT_ORDER=0xf461
NET_INSTALL_AT_POWER_ON=1
PCIE_PROBE=1
Ctrl+X を使用し、y を入力して結果を保存します。結果は次のとおりです:

次に: Ubuntu を NVMe に書き込む
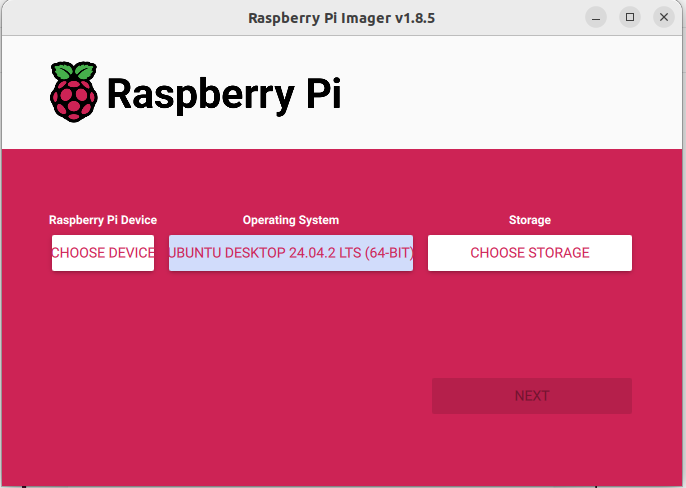
Raspberry Pi Imager を開きます:
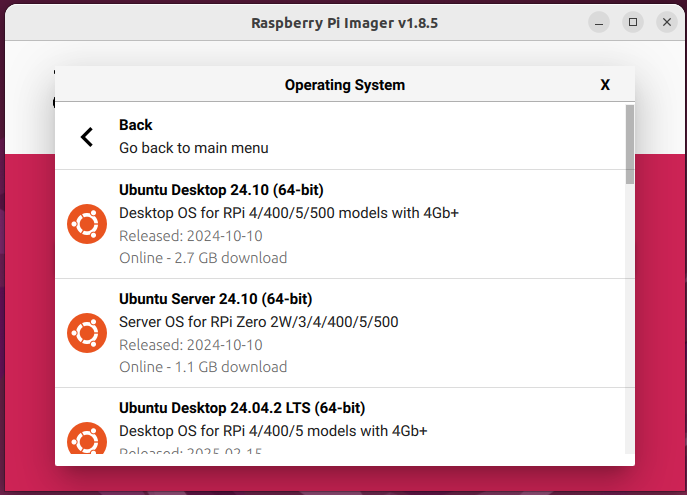
Ubuntu OS を選択します:
最後に Next をクリックし、フラッシュ処理が完了するまで待ちます。
Ubuntu を起動した後、Fix M.2 Dual Hat Driver の手順に従って pcie-fix.dtbo オーバーレイをインストールし、M.2 Dual Hat ドライバを修正する必要があります。
M.2 Dual Hat ドライバの修正
新しい OS イメージを書き込んだ後、pcie-fix.dtbo オーバーレイをインストールして M.2 Dual Hat ドライバを修正します。
書き込み済みの OS に入り、ターミナルで次のコマンドを実行します:
cd /tmp
wget https://files.seeedstudio.com/wiki/reComputer-R2000/pcie-fix.dtbo
sudo cp pcie-fix.dtbo /boot/firmware/overlays/
echo "dtoverlay=pcie-fix" | sudo tee -a /boot/firmware/config.txt
sudo reboot
消費電力と温度
⚠️ 注意: 待機状態は、グラフィカルインターフェースを無効にし、Bluetooth をオフにし、Wi-Fi を無効にした次の条件下でテストされました。コマンドは次のとおりです:
sudo ifconfig wlan0 down
sudo systemctl stop bluetooth
sudo systemctl stop lightdm
| 条件 | 消費電力 | 温度 |
|---|---|---|
| スタンバイ | 5.9w | cpu:46°C |
| 通常動作 | 6.3w | cpu:53°C |
| 最大負荷 | 16.2w | cpu:75°C hailo8:81°C |
アプリケーション
Frigate
Frigate は、AI を使用したリアルタイム物体検出向けに設計されたオープンソースの NVR(Network Video Recorder)です。既存のカメラと連携し、TensorFlow や Coral などの機械学習モデルを用いて、ビデオフィード上で物体検出を行います。Frigate は低レイテンシかつ高性能なビデオ処理に最適化されており、動体検知、ライブビデオストリーム、自動アラートなどの機能を提供します。
注意: このプロジェクトの詳細を知りたい場合は、このリンクを参照してください。
YOLO
YOLO(You Only Look Once)シリーズのモデルは、高速かつ高精度なリアルタイム物体検出モデルのファミリーです。領域提案と分類を別々に行う従来の物体検出手法とは異なり、YOLO はニューラルネットワークの 1 回の順伝播で両方のタスクを実行するため、はるかに高速です。YOLO モデルは画像をグリッドに分割し、各グリッドセルに対してバウンディングボックスとクラス確率を予測します。長年にわたり、YOLO は精度、速度、より小さな物体を検出する能力の向上など、さまざまなバージョンを通じて進化してきました。YOLOv4、YOLOv5、そして最近の YOLOv7 や YOLOv8 モデルは、監視、自動運転車、ロボティクスなどの用途で広く利用されています。
注意: このプロジェクトの詳細を知りたい場合は、このリンクを参照してください。
Clip
CLIP(Contrastive Language-Image Pretraining)は、画像と言語を組み合わせて理解できる、OpenAI によって開発された機械学習モデルです。画像とそれに対応するテキスト記述を関連付けるように学習されており、両方のモダリティを含むタスクを実行できるようになっています。CLIP はゼロショット学習が可能であり、特定のカテゴリについて個別に学習させなくても、画像内の物体や概念を認識できます。画像分類、物体検出、さらには画像のテキストによる説明生成など、さまざまなタスクで高い性能を示しています。
注意: このプロジェクトの詳細を知りたい場合は、このリンクを参照してください。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選択いただける、複数のコミュニケーションチャネルをご用意しています。