A603 キャリアボードに JetPack OS をフラッシュする
A603 キャリアボードは、Jetson Orin™ NX/Nano モジュールをサポートする強力な拡張ボードです。1 GbE ポート、SSD 用 M.2 Key M、WiFi/BlueTooth 用 M.2 Key E、CSI、高品質ビデオキャプチャとディスプレイ用 HDMI を搭載しています。また、4x USB ポート、ファン、RTC、柔軟な 9-20V 電源供給も含まれています。コンパクトな設計により、様々なエッジコンピューティングアプリケーションに柔軟かつ簡単に統合できます。この wiki では、A603 キャリアボードに接続された NVMe SSD と USB フラッシュドライブに Jetpack をフラッシュする方法を説明します。
サポートされるモジュール
- NVIDIA® Jetson Orin™ Nano Module 4GB
- NVIDIA® Jetson Orin™ Nano Module 8GB
- NVIDIA® Jetson Orin™ NX Module 8GB
- NVIDIA® Jetson Orin™ NX Module 16GB
前提条件
- Ubuntu ホスト PC
- Jetson Orin モジュール付き A603 キャリアボード
- Micro-USB データ転送ケーブル
フォースリカバリモードに入る
インストール手順に進む前に、ボードがフォースリカバリモードになっていることを確認する必要があります。
ステップバイステップの詳細チュートリアル
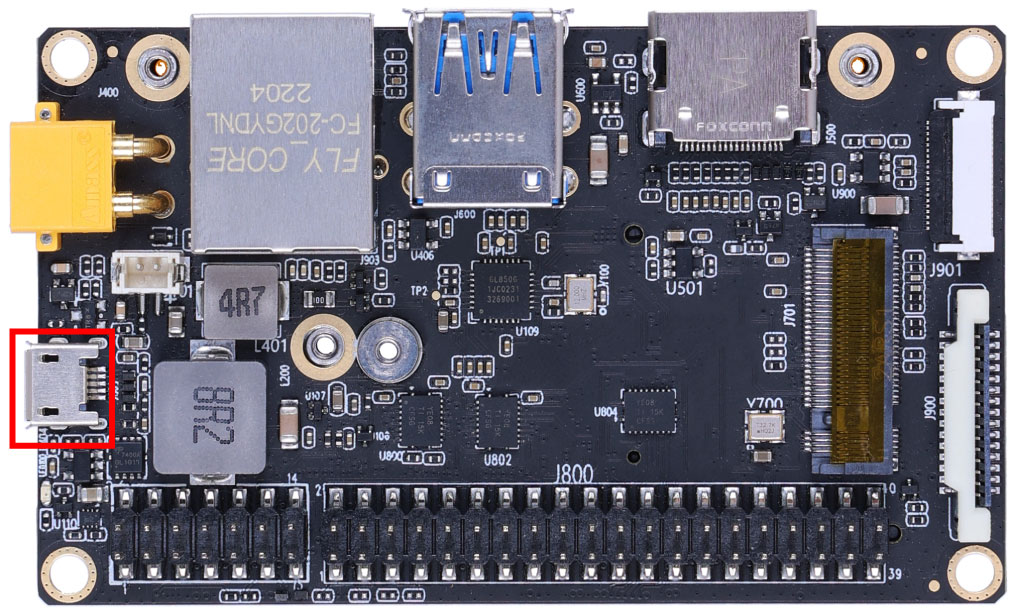
ステップ 1. ボードの micro-USB コネクタと Linux ホスト PC の間に USB ケーブルを接続します
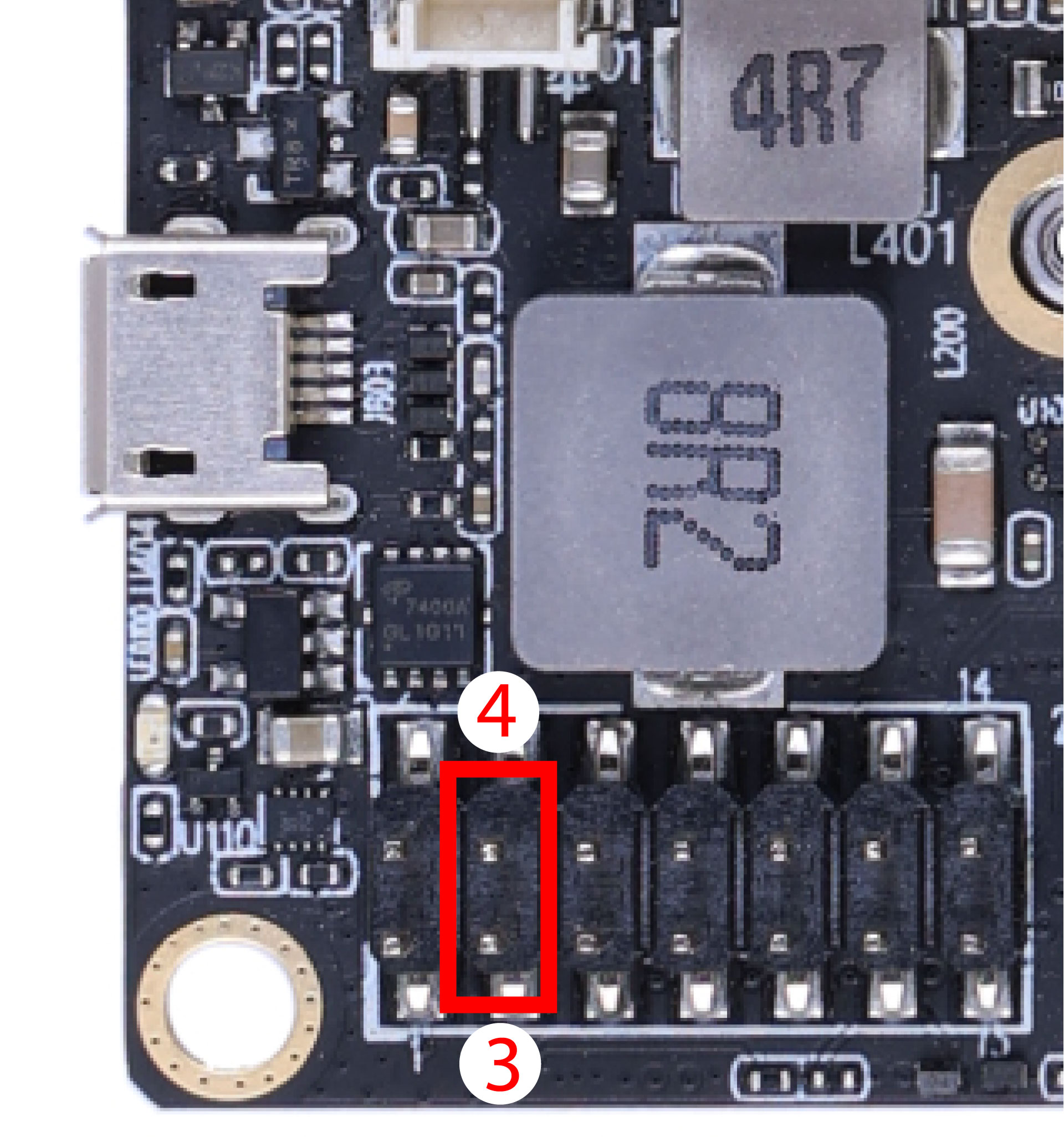
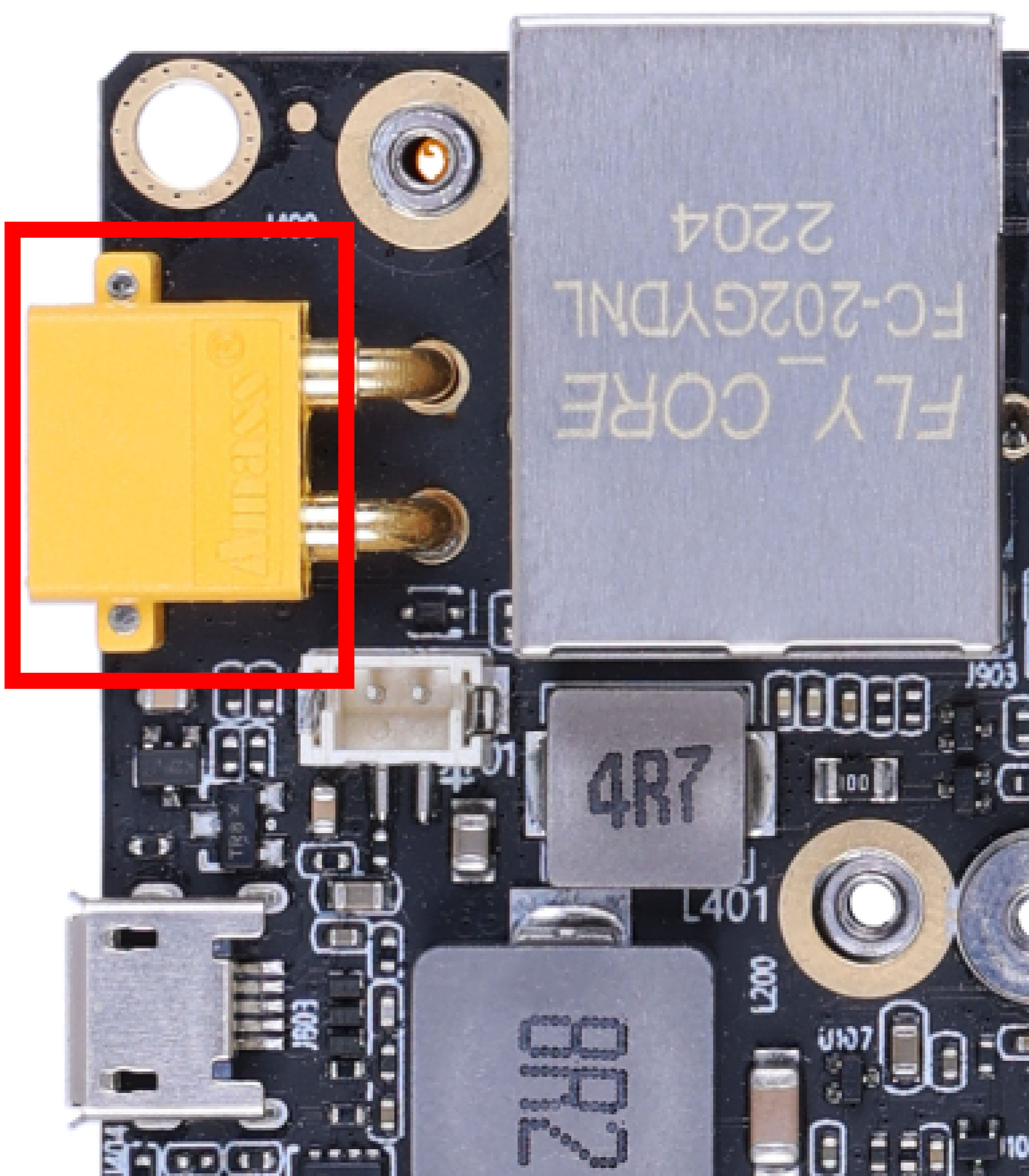
ステップ 2. 14 ピンヘッダーのピン 3 とピン 4 の間にジャンパーワイヤーを接続します
ステップ 3. ボードの DC JACK に電源アダプターを接続してボードの電源を入れます
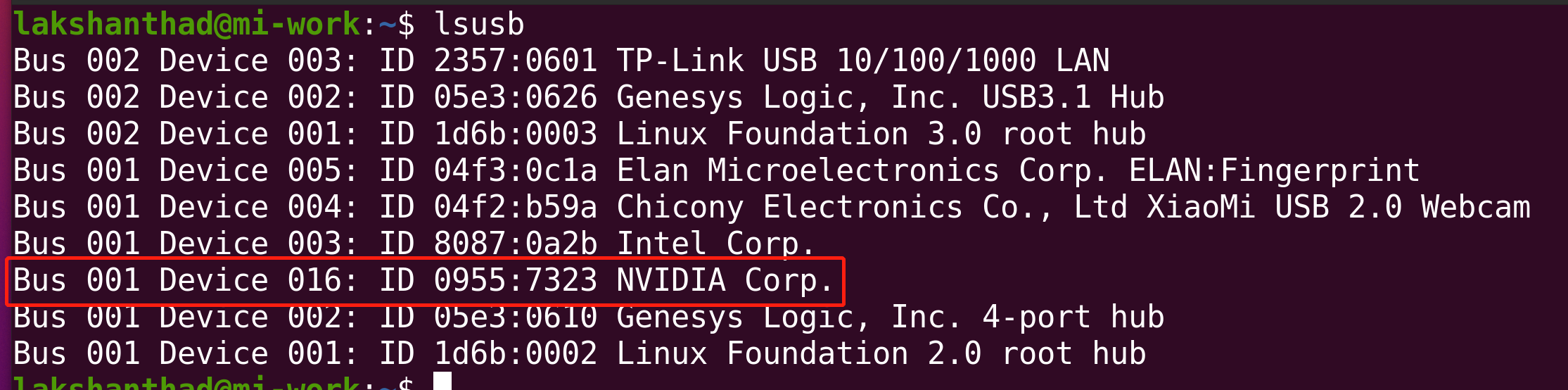
ステップ 4. Linux ホスト PC でターミナルウィンドウを開き、コマンド lsusb を入力します。使用している Jetson SoM に応じて、返される内容に以下の出力のいずれかが含まれている場合、ボードはフォースリカバリモードになっています。
- Orin NX 16GB の場合: 0955:7323 NVidia Corp
- Orin NX 8GB の場合: 0955:7423 NVidia Corp
- Orin Nano 8GB の場合: 0955:7523 NVidia Corp
- Orin Nano 4GB の場合: 0955:7623 NVidia Corp
以下の画像は Orin NX 16GB の場合です。
ステップ 5. ジャンパーワイヤーを取り外します。
周辺機器ドライバーのダウンロード
まず最初に、このボード用の周辺機器ドライバーをインストールする必要があります。これらはボード上の一部のハードウェア周辺機器が機能するために必要です。Jetsonモジュールに応じて、以下のリンクをクリックしてドライバーをダウンロードしてください
| Jetsonモジュール | JetPack バージョン | L4Tバージョン | ダウンロードリンク |
|---|---|---|---|
| Jetson Orin NX 8GB/ 16GB | 5.1 | 35.2.1 | ダウンロード |
| 5.1.1 | 35.3.1 | ダウンロード | |
| Jetson Orin Nano 4GB/ 8GB | 5.1.1 | 35.3.1 | ダウンロード |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 5.1.2 | 35.4.1 | ダウンロード |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 5.1.4 | 35.6.0 | ダウンロード |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.0 | 36.3 | ダウンロード |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.1 | 36.4 | ダウンロード |
| Jetson Orin NX 8GB/ 16GB, Jetson Orin Nano 4GB/ 8GB | 6.2 | 36.4.3 | ダウンロード |
ダウンロードしたファームウェアの整合性を確認するために、SHA256ハッシュ値を比較することができます。
Ubuntuホストマシンで、ターミナルを開き、コマンド sha256sum <File> を実行して、ダウンロードしたファイルのSHA256ハッシュ値を取得します。結果のハッシュがこちらで提供されているSHA256ハッシュと一致する場合、ダウンロードしたファームウェアが完全で破損していないことが確認されます。
注意: 現在、上記のドライバーを提供しています。新しいJetPackバージョンのリリースに伴い、今後もドライバーを更新し続けます。
Jetsonへのフラッシュ
こちらは、A603キャリアボード + Orin Nx 16GBモジュールにJetPack 6.1をフラッシュする動画です。動画と以下の詳細な手順を参考にして、デバイスをフラッシュできます。
フラッシュに進む前に、Jetson Orin NXモジュールはJetPack 5.1以上のみをサポートし、Jetson Orin NanoモジュールはJetPack 5.1.1以上のみをサポートすることに注意してください。
- JP5.1.1 for Jetson Orin NX
- JP5.1.1 for Jetson Orin Nano
- JP5.1.2
- JP5.1.4
- JP6.0
- JP6.1
- JP6.2
ここでは、Jetson Orin NXモジュール搭載のA603キャリアボードにJetpack 5.1.1をインストールします。
ステップ1: ホストPCにNVIDIAドライバーをダウンロードします。必要なドライバーは以下の通りです:
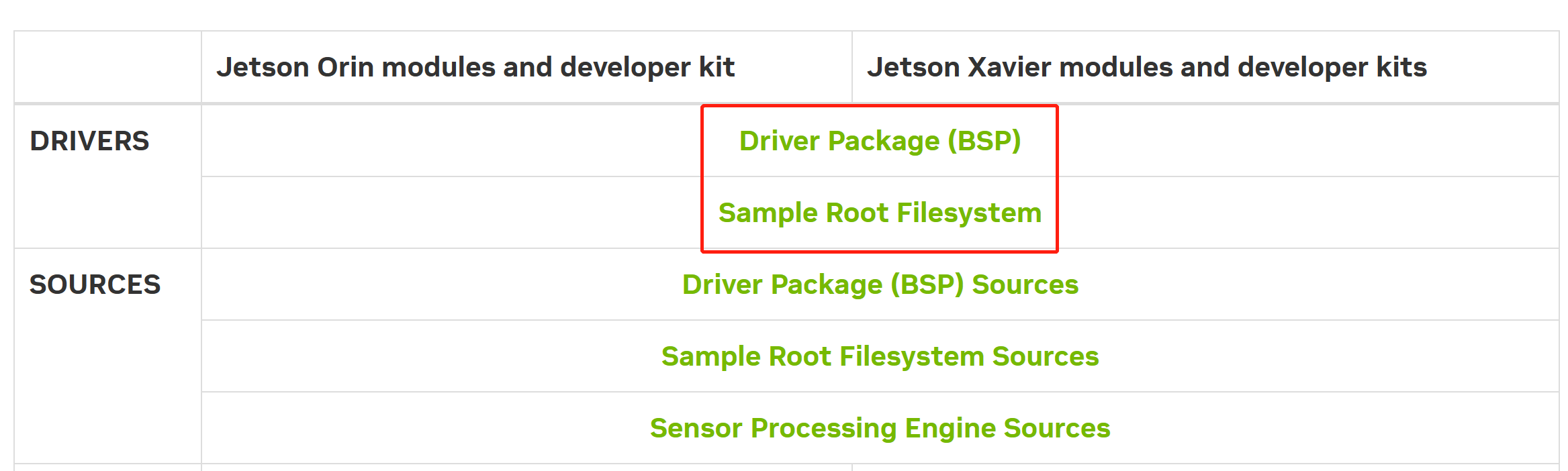
ステップ2: 前にダウンロードした周辺機器ドライバーを、NVIDIAドライバーと同じフォルダに移動します。これで、同じフォルダに3つの圧縮ファイルが表示されます。
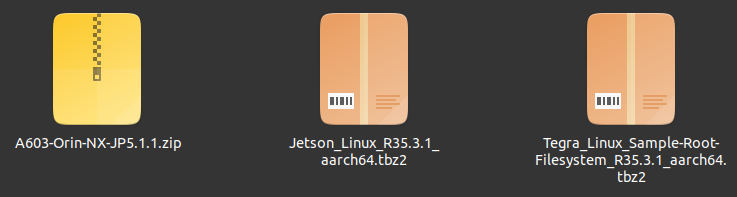
ステップ3: Jetson_Linux_R35.3.1_aarch64.tbz2とTegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2を、これらのファイルを含むフォルダに移動して展開し、変更を適用して必要な前提条件をインストールします
tar xf Jetson_Linux_R35.3.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ4: A603-Orin-NX-JP5.1.1.zipを展開します。ここでは、.zipファイルを解凍するために必要なunzipパッケージを追加でインストールします
cd ..
sudo apt install unzip
unzip A603-Orin-NX-JP5.1.1.zip
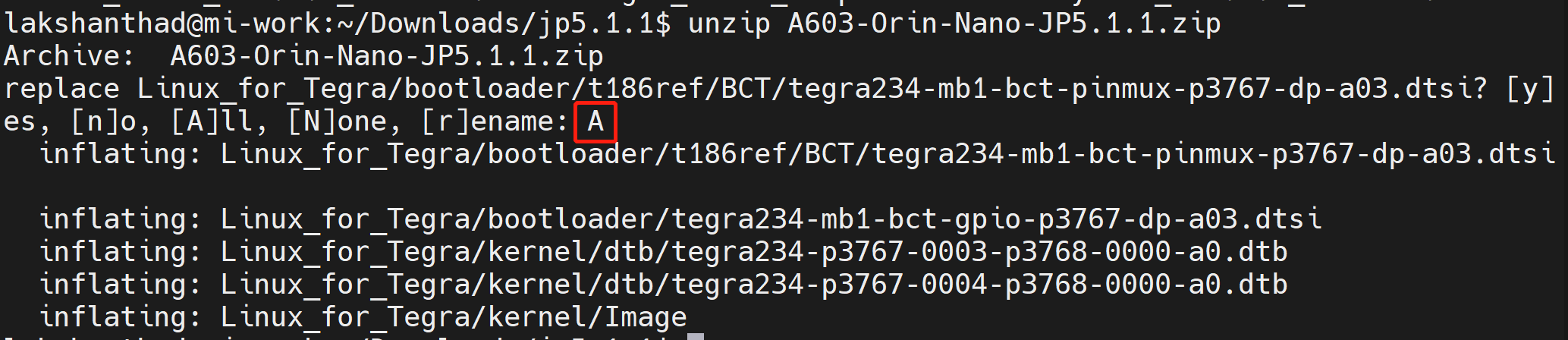
ここで、ファイルを置き換えるかどうかを尋ねられます。A を入力して ENTER を押し、必要なファイルを置き換えてください

ステップ 5: ユーザー名、パスワード、ホスト名を設定して、デバイスの起動完了後にUbuntuインストールウィザードを入力する必要がないようにします。
まず cd Linux_for_Tegra を使用して、正しいディレクトリにいることを確認してください。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例えば(ユーザー名:"nvidia"、パスワード:"nvidia"、デバイス名:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
ステップ 6: システムをNVMe SSDまたはUSBフラッシュドライブにフラッシュする
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 p3509-a02+p3767-0000 internal
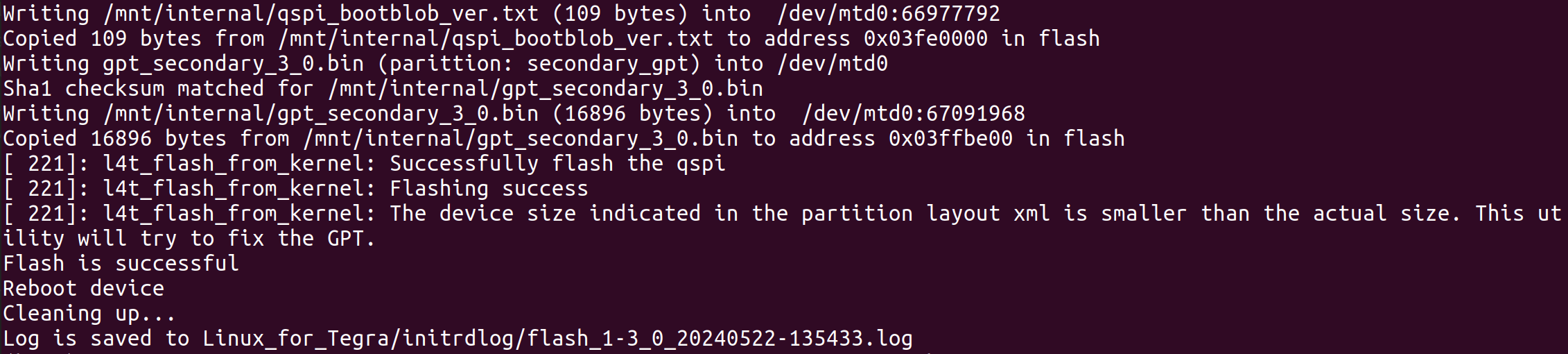
フラッシュプロセスが成功した場合、以下の出力が表示されます
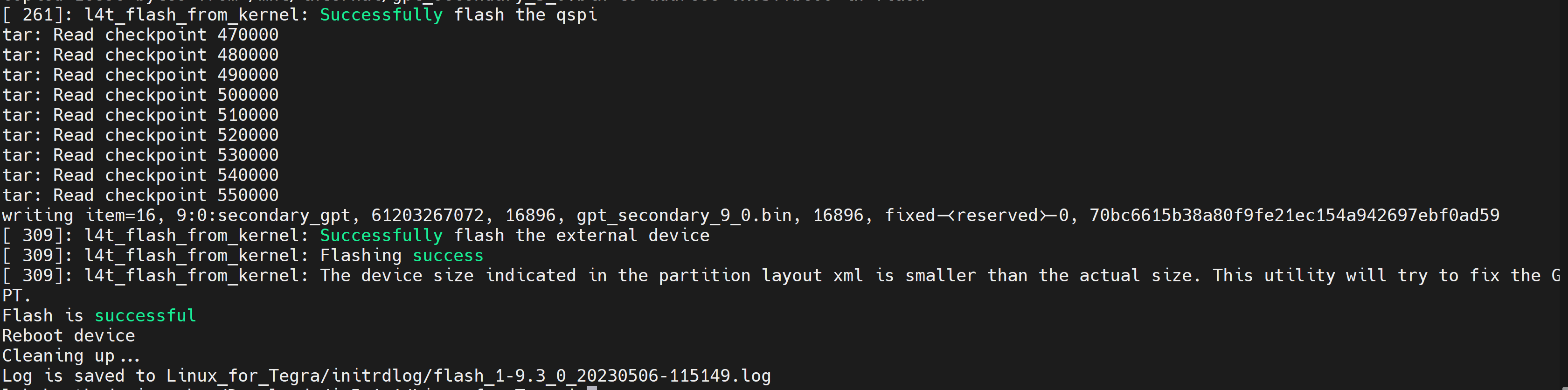
ここでは、NVIDIA L4T 35.3.1 を使用して、Jetson Orin Nano モジュール搭載の A603 キャリアボードに Jetpack 5.1.1 をインストールします
ステップ 1: ホスト PC に NVIDIA ドライバーをダウンロードします。必要なドライバーは以下の通りです:
ステップ 2: 前にダウンロードした周辺機器ドライバーを NVIDIA ドライバーと同じフォルダに移動します。これで同じフォルダに 3 つの圧縮ファイルが表示されます。
ステップ 3: これらのファイルが含まれているフォルダに移動して Jetson_Linux_R35.3.1_aarch64.tbz2 と Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2 を展開し、変更を適用して必要な前提条件をインストールします
tar xf Jetson_Linux_R35.3.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ4: A603-Orin-NX-JP5.1.1.zipを展開します。ここでは、.zipファイルを解凍するために必要なunzipパッケージを追加でインストールします
cd ..
sudo apt install unzip
unzip A603-Orin-NX-JP5.1.1.zip
ここで、ファイルを置き換えるかどうかを尋ねられます。A を入力して ENTER を押し、必要なファイルを置き換えてください
ステップ 5: ユーザー名、パスワード、ホスト名を設定して、デバイスの起動完了後にUbuntuインストールウィザードを入力する必要がないようにします
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例えば(ユーザー名:"nvidia"、パスワード:"nvidia"、デバイス名:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
ステップ 6: システムをNVMe SSDまたはUSBフラッシュドライブにフラッシュする
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit internal
フラッシュプロセスが成功すると、以下の出力が表示されます。
ここでは、Jetson Orinモジュール搭載のA603キャリアボードにJetpack 5.1.2をインストールします。
ステップ1: ホストPCにNVIDIAドライバーをダウンロードします。必要なドライバーは以下の通りです:
ステップ2: 前にダウンロードした周辺機器ドライバーを、NVIDIAドライバーと同じフォルダに移動します。これで同じフォルダに3つの圧縮ファイルが表示されます。
ステップ3: Jetson_Linux_R35.4.1_aarch64.tbz2とTegra_Linux_Sample-Root-Filesystem_R35.4.1_aarch64.tbz2を、これらのファイルが含まれているフォルダに移動して展開し、変更を適用して必要な前提条件をインストールします。
tar xf Jetson_Linux_R35.4.1_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R35.4.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ4: A603-JP5.1.2.zipを展開します。ここでは、.zipファイルを解凍するために必要なunzipパッケージを追加でインストールします。
cd ..
sudo apt install unzip
unzip A603-JP5.1.2.zip
ステップ5: デバイスの起動完了後にUbuntuインストールウィザードを入力する必要がないよう、ユーザー名、パスワード、ホスト名を設定します。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例えば(ユーザー名:"nvidia"、パスワード:"nvidia"、デバイス名:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
ステップ 6: システムをNVMe SSDにフラッシュします。
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
フラッシュプロセスが成功すると、以下の出力が表示されます。
ここでは、Jetson Orinモジュール搭載のA603キャリアボードにJetpack 5.1.4をインストールします。
ステップ1: ホストPCにNVIDIAドライバーをダウンロードします:
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/jetson_linux_r35.6.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v6.0/release/tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2
ステップ2: フラッシュパッケージの組み立て 以下のコマンドを順番に実行してください:
tar xf jetson_linux_r35.6.0_aarch64.tbz2
sudo tar xpf tegra_linux_sample-root-filesystem_r35.6.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
tar zxpf 603_jp514.tar.gz # Unzip the driver package
sudo cp -r 603_jp514/Linux_for_Tegra/* Linux_for_Tegra/ # Replace all files in the Linux_for_Tegra directory with the files from the driver package
cd Linux_for_Tegra/ # Navigate to the Linux_for_Tegra path to run the flashing commands
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ 3: デバイスをリカバリモードにする。フラッシュを行うためには、デバイスをリカバリモードにする必要があります。以下の手順でリカバリモードに入ります:
- キャリアボード上のRECピンとGNDピンをショートさせます。
- Micro USBデータケーブルを使用してキャリアボードをPCに接続します。
- デバイスの電源を入れます。
- PC上で
lsusbを実行し、プロダクトIDが以下のいずれかであることを確認します:7323、7423、7523、または7623。これはデバイスがリカバリモードにあることを示します:- 7323: Orin NX 16G
- 7423: Orin NX 8G
- 7523: Orin Nano 8G
- 7623: Orin Nano 4G
ステップ 4: デバイスをフラッシュする。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
ヒント: システムのバックアップとバックアップイメージを使用したフラッシュ
-
システムをSSDにフラッシュした場合は、以下のコマンドを実行してください:
-
イメージをバックアップするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit -
バックアップイメージを使用してフラッシュするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit
完了すると、デバイスはシステムに起動できます。
-
ここでは、Jetson Orinモジュール搭載のA603キャリアボードにJetpack 6.0をインストールします。
ステップ1: ホストPCにNVIDIA ドライバーをダウンロードします。必要なドライバーは以下の通りです:
ステップ2: 以前にダウンロードした周辺機器ドライバーを、NVIDIAドライバーと同じフォルダに移動します。これで、同じフォルダに3つの圧縮ファイルが表示されます。
ステップ3: これらのファイルが含まれているフォルダに移動して、Jetson_Linux_R36.3.0_aarch64.tbz2とTegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2を展開します。
sudo tar xf Jetson_Linux_R36.3.0_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R36.3.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
ステップ4: A603-JP6.0.zipを展開します。ここでは、.zipファイルを解凍するために必要なunzipパッケージを追加でインストールします。
cd ..
sudo apt install unzip
sudo unzip A603-JP6.0.zip
次に、3つのフォルダ (A603-JP6.0.zip内のbootloader、kernel、rootfs) をLinux_for_Tegraフォルダにコピーします。
ステップ5: 変更を適用し、必要な前提条件をインストールする
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ 6: デバイスの起動完了後にUbuntuインストールウィザードを入力する必要がないよう、ユーザー名、パスワード、ホスト名を設定します。
sudo tools/l4t_create_default_user.sh -u {USERNAME} -p {PASSWORD} -a -n {HOSTNAME} --accept-license
例えば(ユーザー名:"nvidia"、パスワード:"nvidia"、デバイス名:"nvidia-desktop"):
sudo tools/l4t_create_default_user.sh -u nvidia -p nvidia -a -n nvidia-desktop --accept-license
ステップ 7: システムをNVMe SSDにフラッシュします。
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
フラッシュプロセスが成功すると、以下の出力が表示されます。
ここでは、Jetson Orinモジュールを搭載したA603キャリアボードにJetpack 6.1をインストールします。
ステップ1: ホストPCにNVIDIAドライバーをダウンロードします:
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Jetson_Linux_R36.4.0_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.0/release/Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2
ステップ2: フラッシュパッケージの組み立て 以下のコマンドを順番に実行します:
tar xf Jetson_Linux_R36.4.0_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_R36.4.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
tar xpf 603_jetpack6.1.tar.gz # Unzip the driver package
sudo cp -r 603_jetpack6.1/Linux_for_Tegra/* Linux_for_Tegra/ # Replace all files in the Linux_for_Tegra directory with the files from the driver package
cd Linux_for_Tegra/ # Navigate to the Linux_for_Tegra path to run the flashing commands
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ステップ3: デバイスをリカバリモードにする。フラッシュを行うには、デバイスがリカバリモードである必要があります。以下の手順でリカバリモードに入ります:
- キャリアボード上のRECピンとGNDピンをショートさせます。
- Micro USBデータケーブルを使用してキャリアボードをPCに接続します。
- デバイスの電源を入れます。
- PCで
lsusbを実行し、プロダクトIDが以下のいずれかであることを確認します:7323、7423、7523、または7623。これはデバイスがリカバリモードにあることを示します:- 7323: Orin NX 16G
- 7423: Orin NX 8G
- 7523: Orin Nano 8G
- 7623: Orin Nano 4G
ステップ4: デバイスをフラッシュする。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" --showlogs --network usb0 jetson-orin-nano-devkit internal
システムのバックアップとバックアップイメージを使用したフラッシュ
システムをSSDにフラッシュした場合は、以下のコマンドを実行してください:
-
イメージをバックアップするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit -
バックアップイメージを使用してフラッシュするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit完了すると、デバイスはシステムに起動できます。
ここでは、Jetson OrinモジュールとA603キャリアボードにJetpack 6.2をインストールします。
ステップ1: ホストPCにNVIDIAドライバーをダウンロードします:
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Jetson_Linux_r36.4.3_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v4.3/release/Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2
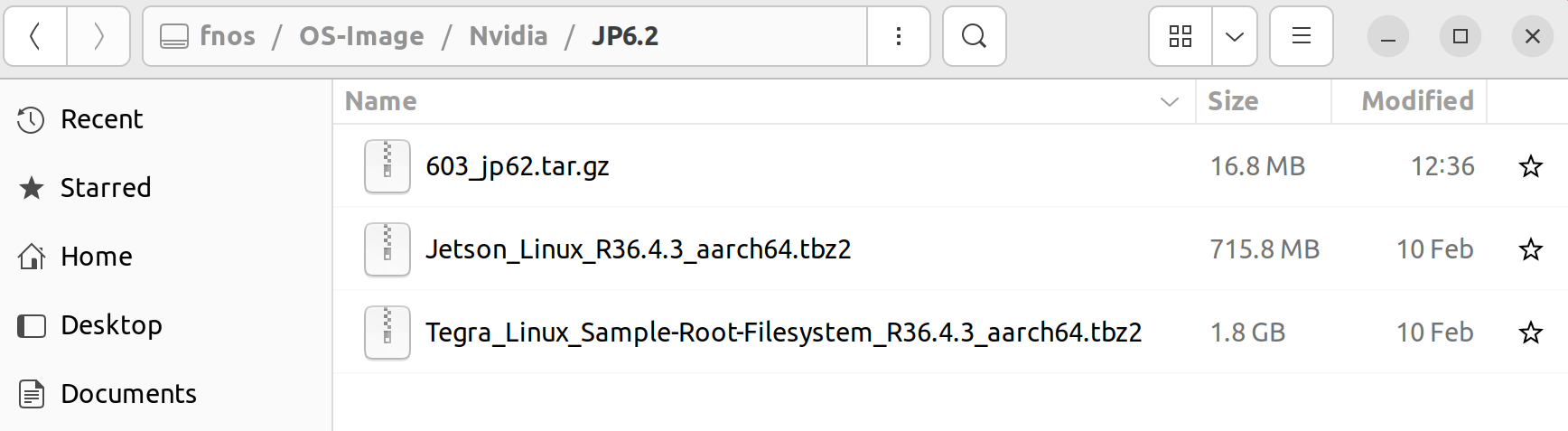
ステップ 2: フラッシュパッケージの組み立て
Nvidiaドライバーと周辺機器ドライバーを同じディレクトリに配置し、そのディレクトリでターミナルを開いて以下のコードを実行する必要があることに注意してください:
tar xf Jetson_Linux_r36.4.3_aarch64.tbz2
sudo tar xpf Tegra_Linux_Sample-Root-Filesystem_r36.4.3_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
sudo tar zxpf 603_jp62.tar.gz
sudo cp -r 603_jp62/Linux_for_Tegra/* Linux_for_Tegra/
cd Linux_for_Tegra/
sudo ./tools/l4t_flash_prerequisites.sh
sudo ./apply_binaries.sh
ステップ 3: デバイスをリカバリモードにする。フラッシュを行うためには、デバイスをリカバリモードにする必要があります。以下の手順でリカバリモードに入ります:
- キャリアボード上のRECピンとGNDピンをショートさせます。
- Micro USBデータケーブルを使用してキャリアボードをPCに接続します。
- デバイスの電源を入れます。
- PC上で
lsusbを実行し、プロダクトIDが以下のいずれかであることを確認します:7323、7423、7523、または7623。これはデバイスがリカバリモードにあることを示します:- 7323: Orin NX 16G
- 7423: Orin NX 8G
- 7523: Orin Nano 8G
- 7623: Orin Nano 4G
ステップ 4: デバイスをフラッシュする。
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \
-c tools/kernel_flash/flash_l4t_t234_nvme.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \
--showlogs --network usb0 jetson-orin-nano-devkit-super internal
ヒント: システムのバックアップとバックアップイメージを使用したフラッシュ
システムをSSDにフラッシュした場合は、以下のコマンドを実行してください:
-
イメージをバックアップするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -b jetson-orin-nano-devkit-super -
バックアップイメージを使用してフラッシュするには(リカバリモードが必要):
sudo ./tools/backup_restore/l4t_backup_restore.sh -e nvme0n1 -r jetson-orin-nano-devkit-super完了すると、デバイスはシステムに起動できるようになります。
CANインターフェース
A603キャリアボードにはCANトランシーバーが搭載されているため、開発キットのような追加のトランシーバーは必要ありません。
ステップ1. レジスタに値を書き込むためにdevmem2をインストールします:
sudo apt-get install devmem2
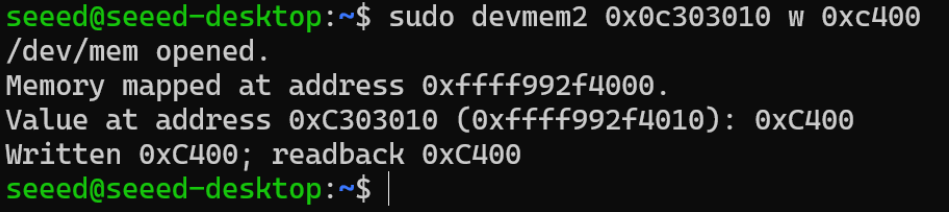
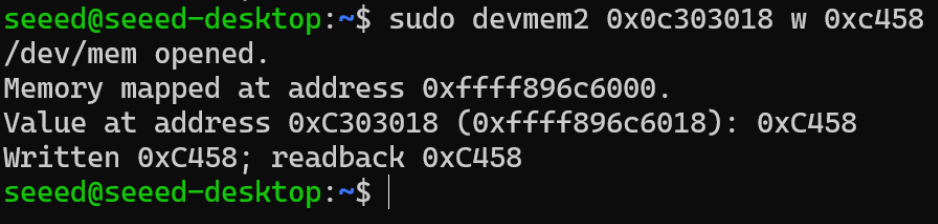
ステップ2. こちらに従って値を記述します。
sudo devmem2 0x0c303010 w 0xc400
sudo devmem2 0x0c303018 w 0xc458
ステップ3. カーネルモジュールをロードする:
sudo modprobe can
sudo modprobe can_raw
sudo modprobe mttcan
これらのモジュールを読み込んだ後、sudo dmesg でこれらのログを確認できるはずです:

ステップ4. can0インターフェースを起動します:
sudo ip link set can0 type can bitrate 500000
オプションで、ビットレートを1000000に変更することもできます。その後、can0を起動します:
sudo ip link set can0 up
ifconfigでインターフェースを確認します:

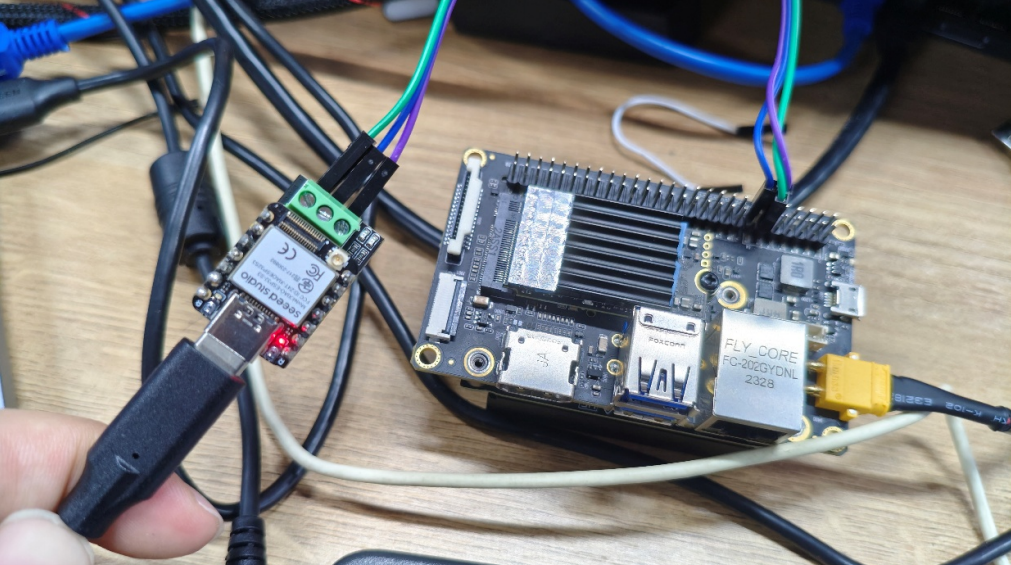
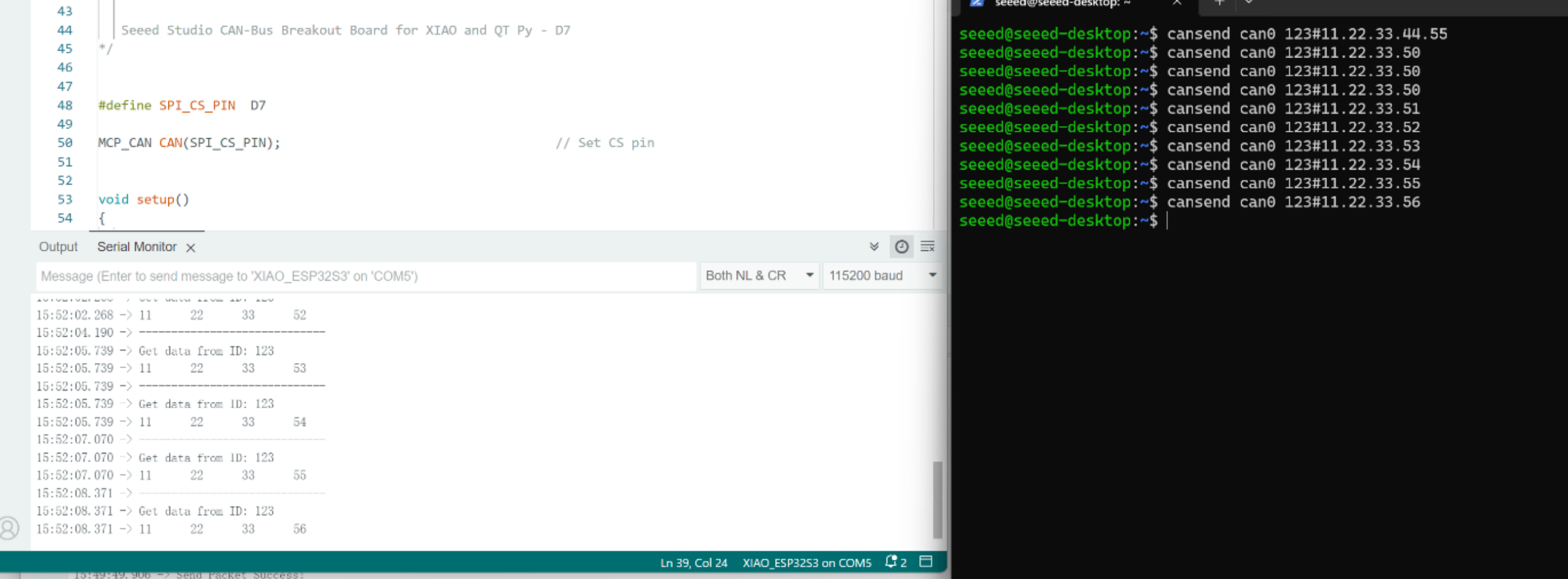
ステップ5. データの送信(can-utilsのインストールが必要)。反対側では、CAN拡張ボード付きのMCUを使用してデータを受信しました。
jetsonターミナルでcansend can0 123#11.22.33.50を実行します:
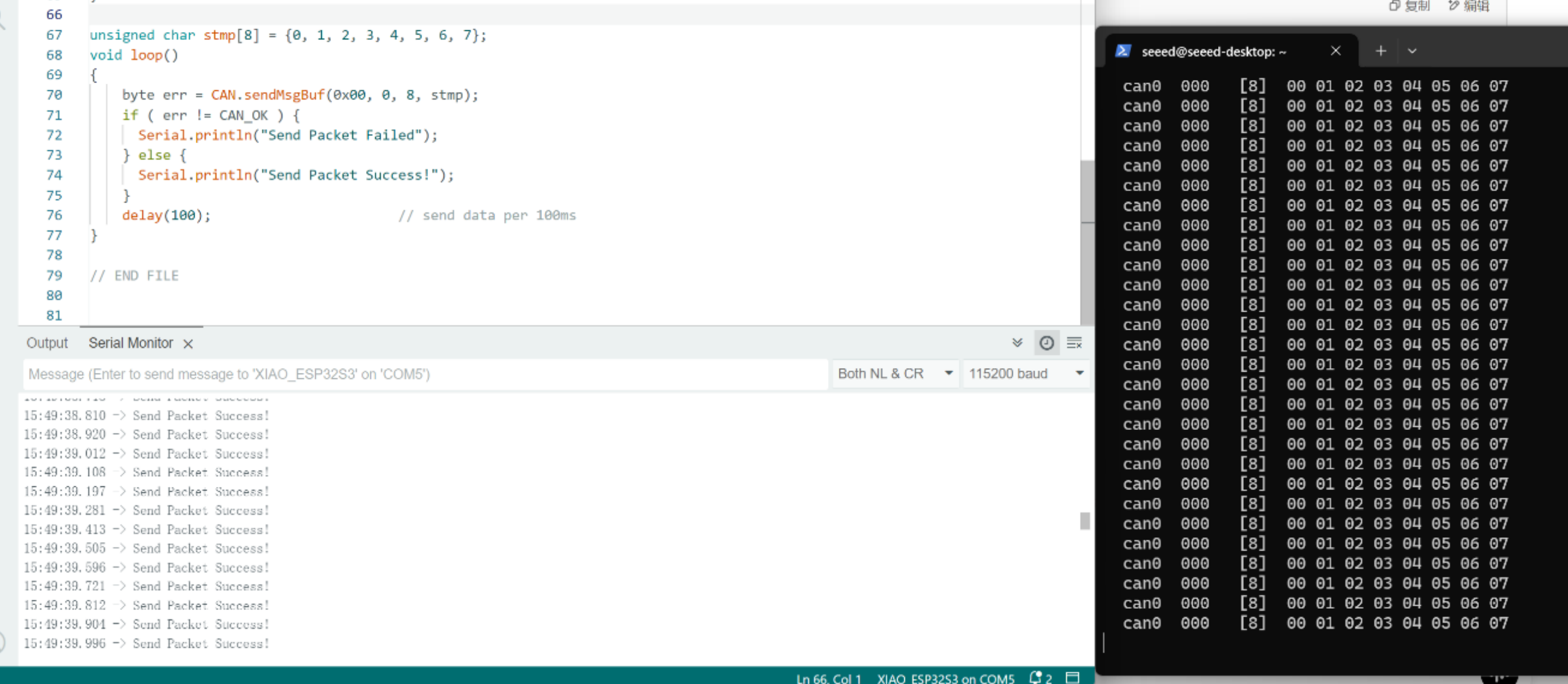
ステップ6. データの受信。反対側では、CAN拡張ボード付きのMCUを使用してデータを送信しました。
jetsonターミナルでcandump can0を実行します:
参考資料
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。