reServer Industrial を使い始める

reServer Industrial シリーズは、NVIDIA Jetson™ Orin Nano/Orin NX モジュールを搭載したファンレスでコンパクトな AI 対応 NVR(Network Video Recorder)サーバーを提供し、20 TOPS から 100 TOPS までの AI 性能を実現します。reServer Industrial は Jetpack 5.1.1 をプリインストールしており、開発を簡素化し、強力な AI 機能とともに VMS(Video Management System)を構築するのに最適で、スマートシティ、セキュリティ、産業オートメーション、スマートファクトリーなどの産業分野におけるデジタル変革をもたらします。
reServer Industrial はパッシブヒートシンクとファンレス設計を採用しており、要求の厳しい環境での使用に最適です。パッシブヒートシンクによりファンを必要とせず効率的な冷却が可能となり、ほこりやその他の汚染物質による部品故障のリスクを低減します。ファンレス設計は騒音レベルと消費電力も低減するため、騒音に敏感な環境での使用に適しており、エネルギーコストの最小化にもつながります。
reServer Industrial には 5 つの RJ45 GbE ポートがあり、そのうち 4 つは PoE PSE ポートで、IP カメラなどのデバイスに Ethernet 経由で電力を供給します。これにより別途電源を用意する必要がなくなり、電源コンセントが容易に利用できない場所でもネットワーク機器を容易に展開できます。残りの GbE ポートはネットワークスイッチやルーターへの接続に使用され、ネットワーク上の他のデバイスとの通信やインターネットへのアクセスを可能にします。
特長
- ファンレスコンパクト Edge AI サーバー: NVIDIA Jetson™ Orin Nano/Orin NX モジュールを搭載し、20 TOPS から 100 TOPS までの AI 性能を実現、動作温度範囲は -20 ~ 60°C(0.7m/s の気流条件)
- マルチストリーム処理: 5× GbE RJ45(うち 4 ポートは 802.3af PSE)、複数ストリームをリアルタイム処理
- 拡張可能なストレージ: 2.5" SATA HDD/SSD 用の 2 つのドライブベイに加え、NVMe SSD 用の M.2 2280 ソケットを搭載
- 産業用インターフェース: COM ポート、DI/DO ポート、CAN ポート、USB 3.1、およびオプションの TPM2.0 モジュールを搭載
- ハイブリッド接続性: Nano SIM カードスロットを備え、5G/4G/LTE/LoRaWAN®(モジュールはオプション)をサポート
- 認証: FCC、CE、UKCA、ROHS、KC
仕様
| 製品名 | reServer Industrial J4012 | reServer Industrial J4011 | reServer Industrial J3011 | reServer Industrial J3010 | |
|---|---|---|---|---|---|
| NVIDIA Jetson モジュール | Orin NX 16GB | Orin NX 8GB | Orin Nano 8GB | Orin Nano 4GB | |
| SKU | 114110247 | 114110248 | 114110249 | 114110250 | |
| プロセッサー システム | AI 性能 | 100 TOPS | 70 TOPS | 40 TOPS | 20 TOPS |
| GPU | 32 個の Tensor コアを備えた 1024 コア NVIDIA Ampere アーキテクチャ GPU | 16 個の Tensor コアを備えた 512 コア NVIDIA Ampere アーキテクチャ GPU | |||
| CPU | 8 コア Arm® Cortex®-A78AE v8.2 64-bit CPU、2MB L2 + 4MB L3 | 6 コア Arm® Cortex®-A78AE v8.2 64-bit CPU、1.5MB L2 + 4MB L3 | |||
| メモリ | 16GB 128-bit LPDDR5 102.4GB/s | 8GB 128-bit LPDDR5 102.4GB/s | 8GB 128-bit LPDDR5 68 GB/s | 4GB 64-bit LPDDR5 34 GB/s | |
| ビデオエンコード | 対応規格: H.265 (HEVC), H.264, AV1 1×4K60 (H.265) | 3×4K30 (H.265) | 6×1080p60 (H.265) | 12×1080p30 (H.265) | 1~2 個の CPU コアで 1080p30 をサポート | |||
| ビデオデコード | 対応規格: H.265 (HEVC), H.264, VP9, AV1 1×8K30 (H.265) | 2×4K60 (H.265) | 4×4K30 (H.265) | 9×1080p60 (H.265) | 18×1080p30 (H.265) | 対応規格: H.265 (HEVC), H.264, VP9, AV1 1×4K60 (H.265) | 2×4K30 (H.265) | 5×1080p60 (H.265) | 11×1080p30 (H.265) | |||
| ストレージ | eMMC | - | |||
| 拡張 | M.2 Key M (2280) PCIe Gen4.0 SSD(M.2 NVMe SSD 128G 付属) | ||||
| I/O | Ethernet | 1× LAN0 RJ45 GbE (10/100/1000Mbps) | |||
| 4× LAN RJ45 GbE PoE(PSE 802.3 af 15 W, 10/100/1000Mbps) | |||||
| USB | 4× USB3.1、1× USB2.0 Type C(デバイスモード)、1× USB2.0 Type C(Debug UART & RP2040 用) | ||||
| DI/DO | 4×DI、4×DO、3×GND_DI、2×GND_DO、1×GND_ISO、1×CAN | ||||
| COM | 1× DB9 (RS232/RS422/RS485) | ||||
| ディスプレイ | 1×HDMI 2.1 Type A 7680x4320 @ 30 Hz | 1×HDMI 1.4 Type A 3840x2160 @ 30 Hz | |||
| SATA | 2.5" SATA HDD/SSD(SATA III 6.0Gbps)をサポートする 2 つのドライブベイ | ||||
| SIM | 1× Nano SIM カードスロット | ||||
| ボタン | リセットボタン、リカバリボタン | ||||
| 拡張 | Mini PCIe | LoRaWAN®/4G/シリーズ無線用 Mini PCIe(モジュールはオプション) | |||
| M.2 Key B | M.2 Key B (3042/3052) 4G/5G をサポート(モジュールはオプション) | ||||
| ファン | ファンレス、パッシブヒートシンク;1×ファンコネクタ(5V PWM) | ||||
| TPM | 1× TPM 2.0 コネクタ(モジュールはオプション) | ||||
| RTC | 1× RTC ソケット(CR1220 付属)、×RTC 2 ピン | ||||
| 電源 | 電源入力 | DC 12V-36V 2 ピン端子台 | |||
| 電源アダプター | 24V /5A 電源アダプター(電源コードなし) | ||||
| 機構 | 寸法 (W x D x H) | 194.33mm×187mm×95.5mm | |||
| 重量 | 2.8kg | ||||
| 設置方法 | デスク、DIN レール、VESA | ||||
| 動作温度 | -20 ~ 60°C(0.7m/s 条件) | ||||
| 動作湿度 | 95% @ 40 °C(結露なきこと) | ||||
| 保管温度 | -40 ~ 85°C | ||||
| 保管湿度 | 60°C@ 95% RH(結露なきこと) | ||||
| 振動 | 3 Grms @ 5 ~ 500 Hz、ランダム、1 時間/軸 | ||||
| 衝撃 | 50G ピーク加速度(11 msec. 継続時間、eMMC、microSD、または mSATA) | ||||
| OS | Jetpack 5.1.1(以上)をプリインストール(ボードサポートパッケージ付き Linux OS を提供) | ||||
| 認証 | FCC, CE, RoHS, UKCA, KC | ||||
| 保証 | 2 年 | ||||
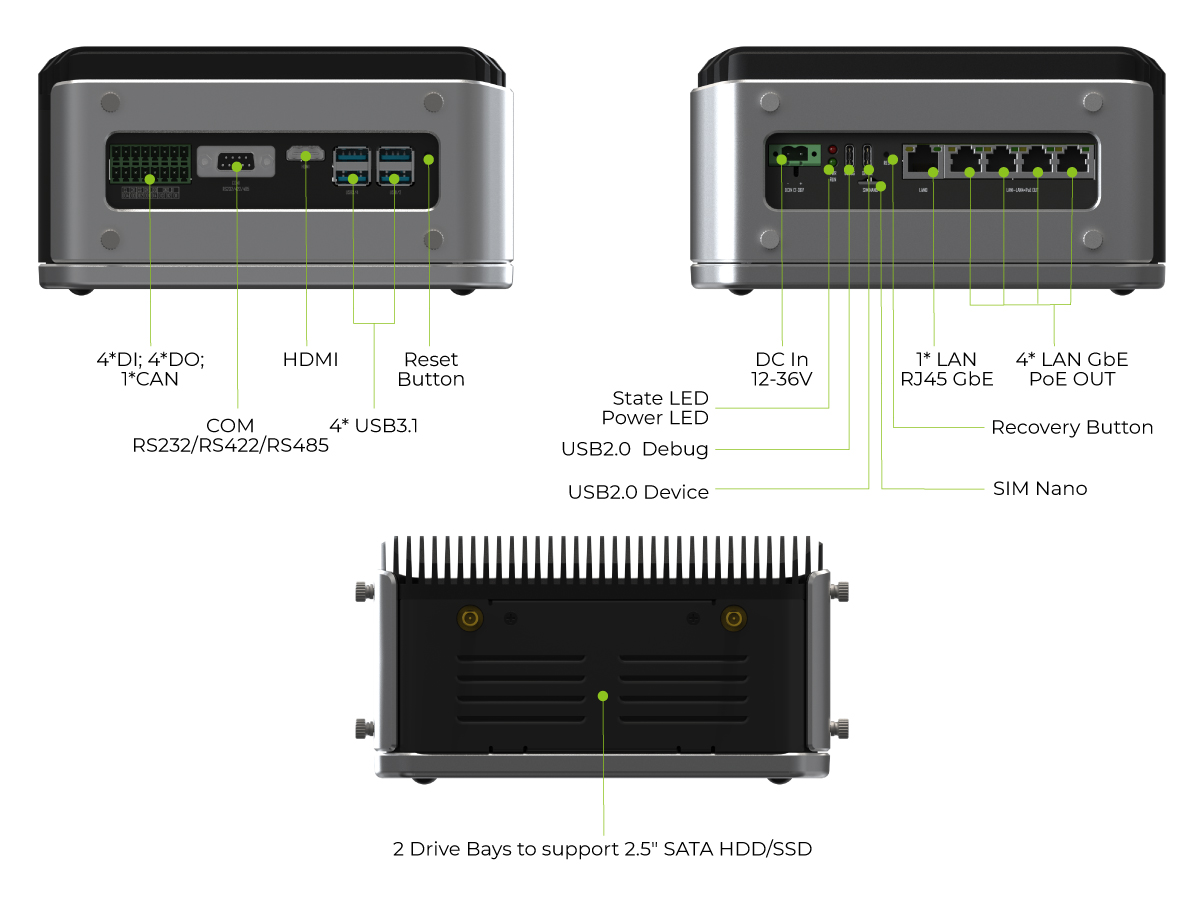
ハードウェア概要
システム全体
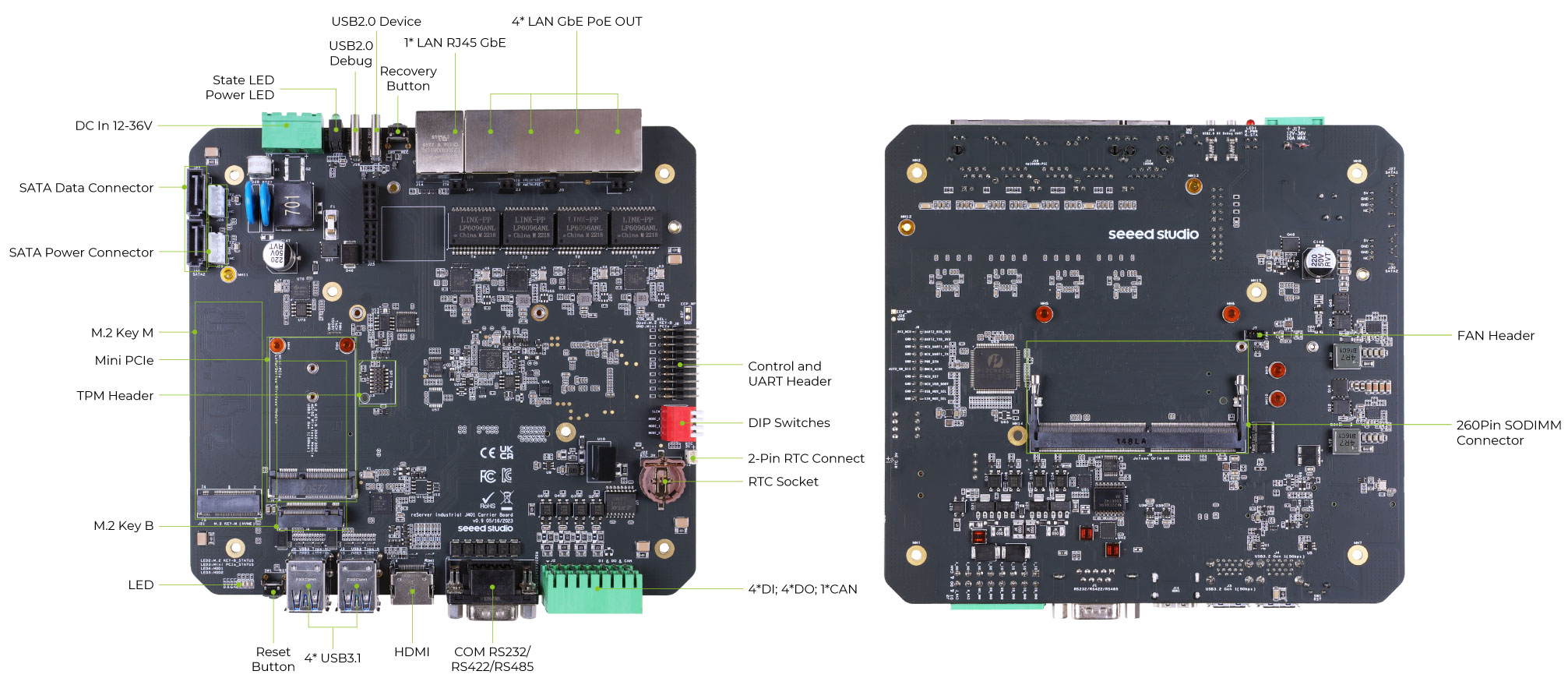
キャリアボード
JetPack をフラッシュする
本製品には JetPack 5.1.1 がプリインストールされています。特別な要件がない限り、システムを再フラッシュする必要はありません。
reServer Industrial には、必要なドライバーとともに JetPack 5.1.1 が 128GB SSD にプリインストールされています。これには CUDA、CUDNN、TensorRT などの SDK コンポーネントが含まれます。ただし、付属の SSD または新しい SSD に Jetpack を再フラッシュしたい場合は、以下の手順に従うことができます。現在、JP5.1.1 向けのガイドのみを提供しており、今後も随時更新していきます。
前提条件
reServer Industrial を使い始める前に、以下のハードウェアを準備する必要があります
- reServer Industrial
- 付属の電源コード付き電源アダプタ(US version または EU version)
- Ubuntu ホスト PC(ネイティブ環境、または VMware Workstation Player を使用した VM)
- USB Type-C データ転送ケーブル
- 外部モニタ
- HDMI ケーブル
- キーボードとマウス
強制リカバリーモードに入る
次に、デバイスを書き込むために reServer Industrial ボードをリカバリーモードにする必要があります。USB Type-C ケーブルを DEVICE ポートと PC の間に接続します。ピンを使用して REC ホールに差し込み、リカバリーボタンを押し続けたまま、付属の 2-Pin Terminal block power connector をボード上の電源コネクタに接続します(端子を固定するために 2 本のネジを必ず締めてください)。その後、付属の電源アダプタと電源コードを接続してボードの電源を入れます
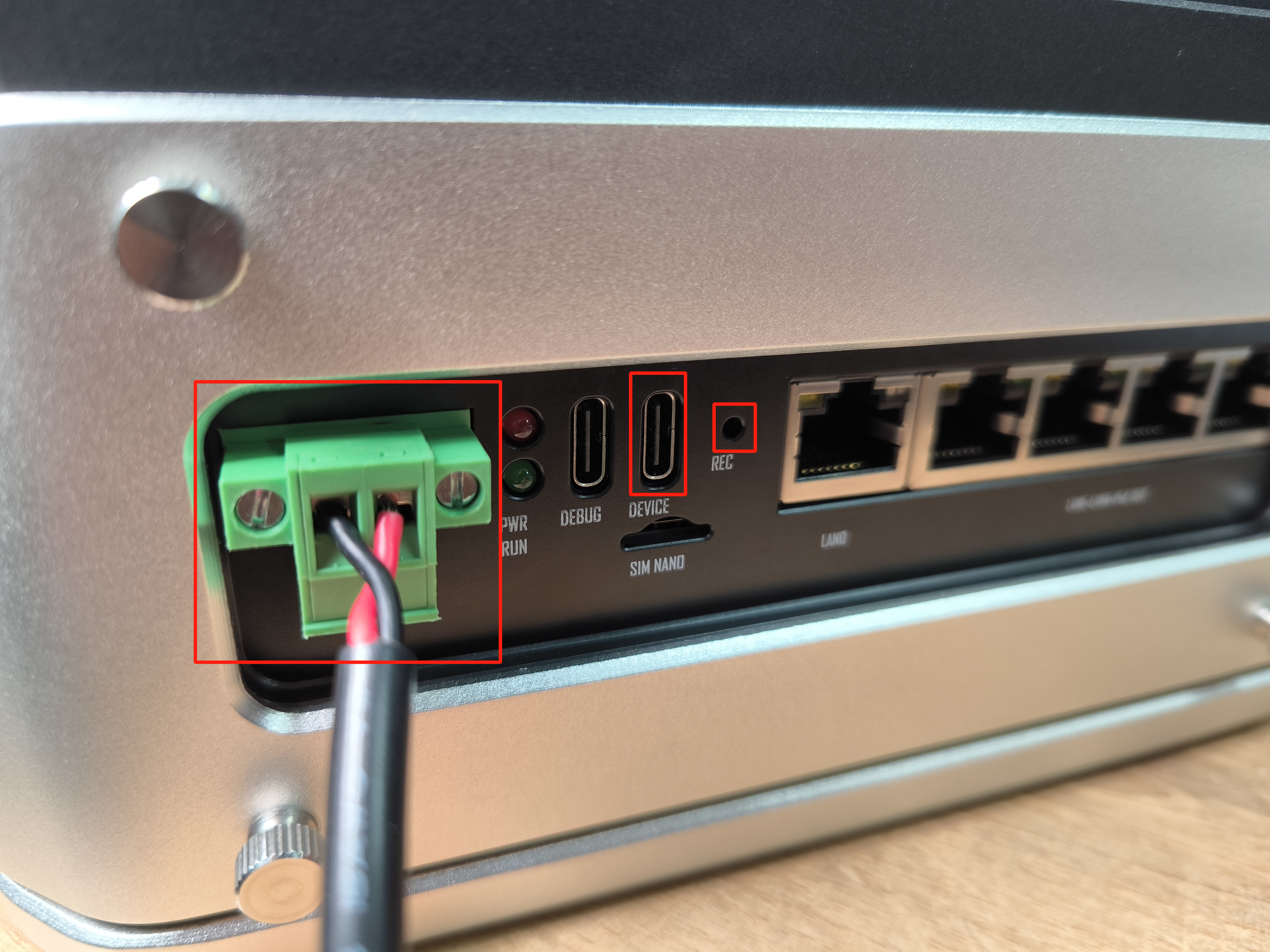
RECOVERY ボタンを押し続けた状態で電源を入れていることを確認してください。そうしないとリカバリーモードに入ることができません
Ubuntu ホスト PC でターミナルウィンドウを開き、コマンド lsusb を入力します。使用している Jetson SoM に応じて、返された内容に次のいずれかの出力が含まれていれば、ボードは強制リカバリーモードになっています。
- Orin NX 16GB の場合: 0955:7323 NVidia Corp
- Orin NX 8GB の場合: 0955:7423 NVidia Corp
- Orin Nano 8GB の場合: 0955:7523 NVidia Corp
- Orin Nano 4GB の場合: 0955:7623 NVidia Corp
書き込みの異なる方法
ここでは 2 つの異なる書き込み方法を提供します。
- NVIDIA JetPack、ハードウェア周辺機器ドライバを含む、当社が用意したシステムイメージ全体をダウンロードしてデバイスに書き込む
- 公式の NVIDIA L4T をダウンロードし、付属のハードウェア周辺機器ドライバを使用してデバイスに書き込む
1 つ目の方法のダウンロードサイズは約 14GB、2 つ目の方法のダウンロードサイズは約 3GB です
- Method 1
- 方法 2
システムイメージをダウンロード
- Step 1: 使用しているボードに対応するシステムイメージを Ubuntu PC にダウンロードします。
| Device | JetPack Version | L4T Version | Image Link | Alternative Image Link |
|---|---|---|---|---|
| reServer Industrial J4012 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J4011 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J3011 | 5.1.1 | 35.3.1 | Download1 | Download2 |
| 5.1.3 | 35.5.0 | Download1 | ||
| 6.0 | 36.3 | Download1 | Download2 | |
| 6.1 | 36.4 | Download1 | ||
| 6.2 | 36.4.3 | Download1 | ||
| reServer Industrial J3010 | 5.1.1 | 35.3.1 | Download1 | ダウンロード2 |
| 5.1.3 | 35.5.0 | ダウンロード1 | ||
| 6.0 | 36.3 | ダウンロード1 | ダウンロード2 | |
| 6.1 | 36.4 | ダウンロード1 | ||
| 6.2 | 36.4.3 | ダウンロード1 |
- Download1 と Download2 の両方のイメージファイルは同じです。ダウンロード速度が速い方のリンクを選択できます。
- Step 2: 生成されたファイルを解凍します
tar -xvf <file_name>.tar.gz
Jetson へのフラッシュ
- Step 1: 先ほど解凍したファイルへ移動し、次のようにフラッシュコマンドを実行します
cd mfi_reserver-orin-industrial
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
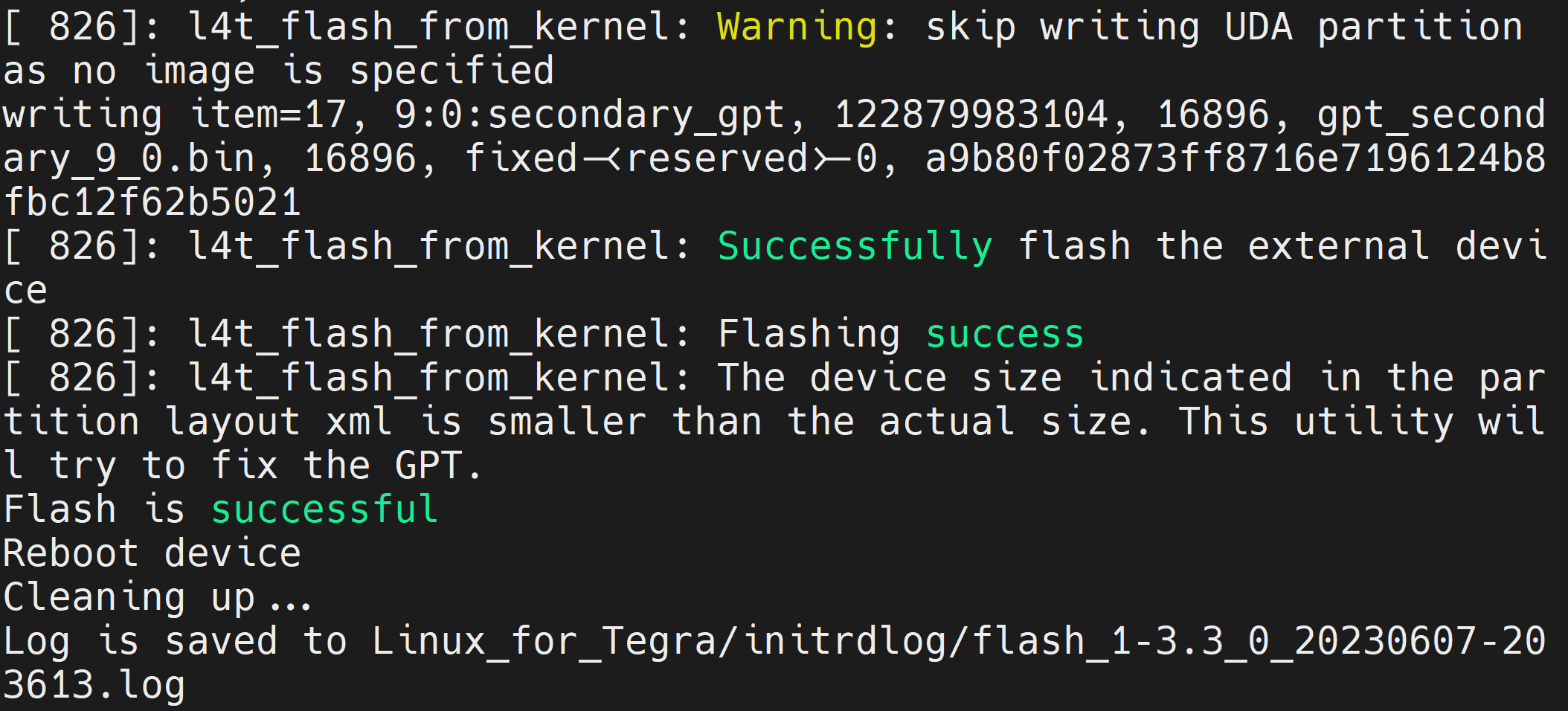
これでボードへのシステムイメージのフラッシュが開始されます。フラッシュが成功すると、次のような出力が表示されます
- Step 2: ボードを HDMI コネクタ経由でディスプレイに接続し、初期設定を完了します
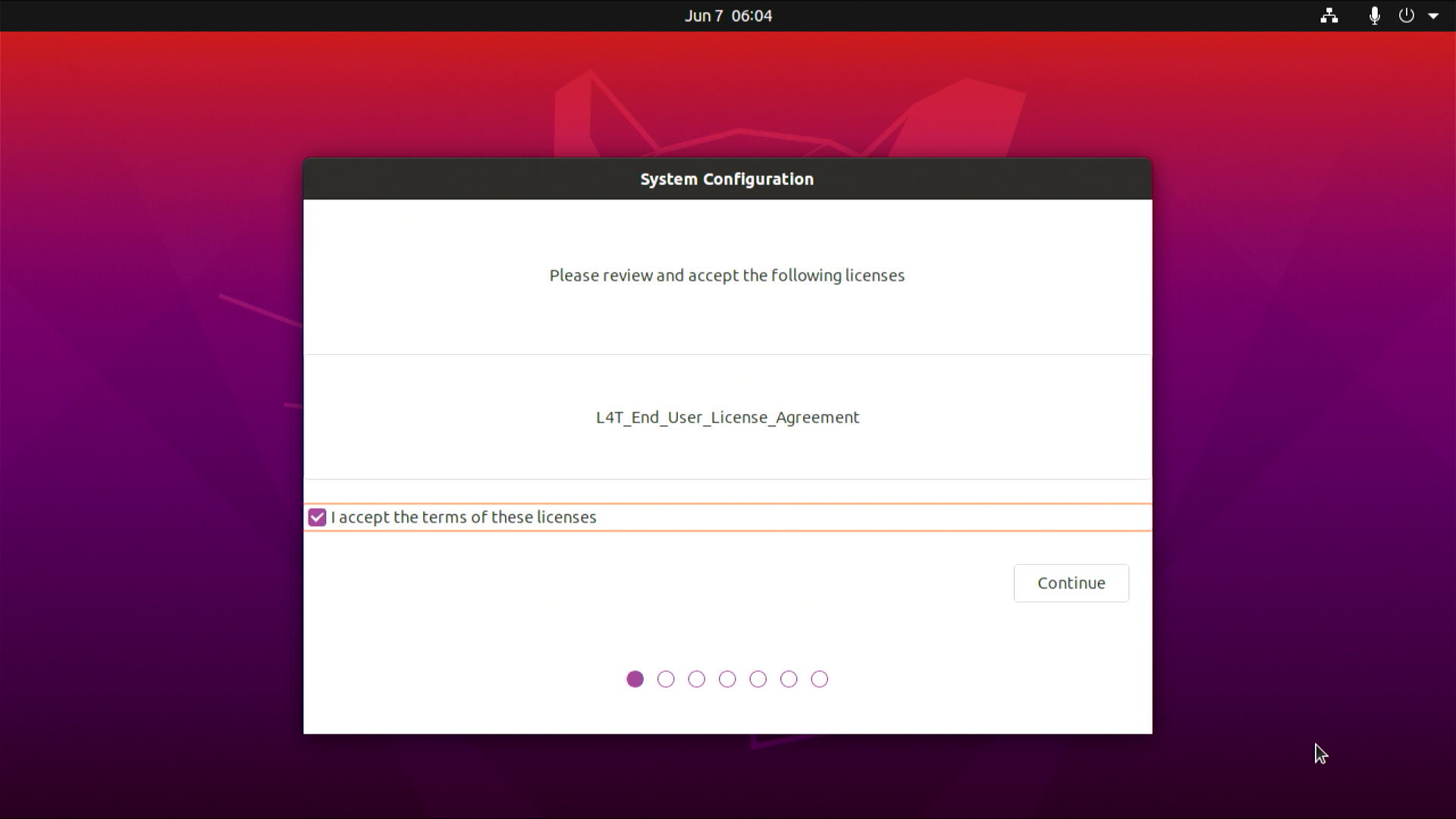
その後、ボードは再起動し、使用できる状態になります!
NVIDIA L4T と rootfs のダウンロードと準備
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v3.1/release/jetson_linux_r35.3.1_aarch64.tbz2
wget https://developer.nvidia.com/downloads/embedded/l4t/r35_release_v3.1/release/tegra_linux_sample-root-filesystem_r35.3.1_aarch64.tbz2
tar xf jetson_linux_r35.3.1_aarch64.tbz2
sudo tar xpf tegra_linux_sample-root-filesystem_r35.3.1_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
cd Linux_for_Tegra/
sudo ./apply_binaries.sh
sudo ./tools/l4t_flash_prerequisites.sh
ドライバのダウンロードと準備
- Step 1: 使用しているボードに対応するドライバファイルを Ubuntu PC にダウンロードします
| Jetson モジュール | ダウンロードリンク | JetPack バージョン | L4T バージョン |
|---|---|---|---|
| Jetson Orin NX 8GB/ 16GB | ダウンロード | 5.1.1 | 35.3.1 |
| Jetson Orin Nano 8GB | ダウンロード | ||
| Jetson Orin Nano 4GB | ダウンロード |
- Step 2: ダウンロードした周辺機器ドライバを Linux_For_Tegra ディレクトリと同じフォルダに移動します

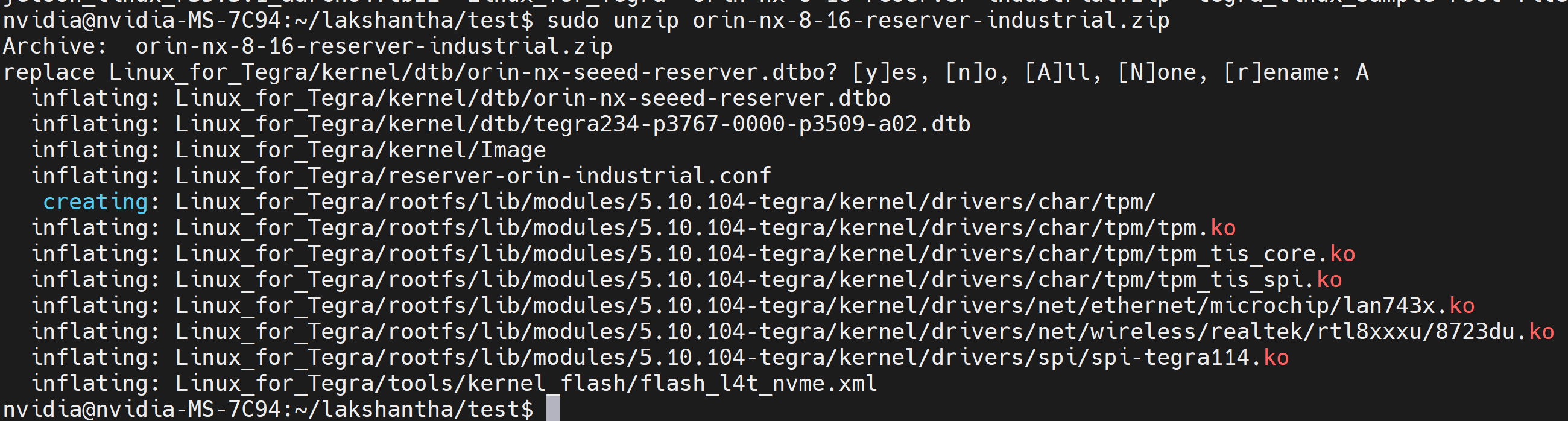
- Step 3: ダウンロードしたドライバの .zip ファイルを解凍します。ここでは、.zip ファイルを解凍するために必要な unzip パッケージも追加でインストールします
sudo apt install unzip
sudo unzip xxxx.zip # Replace xxxx with the driver file name
ここでファイルを置き換えるかどうかを尋ねられます。必要なファイルを置き換えるために A と入力し、ENTER キーを押します
Jetson へのフラッシュ
- Step 1: Linux_for_Tegra ディレクトリへ移動し、次のようにフラッシュコマンドを実行します
cd Linux_for_Tegra
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 -c tools/kernel_flash/flash_l4t_nvme.xml -S 80GiB -p "-c bootloader/t186ref/cfg/flash_t234_qspi.xml --no-systemimg" --network usb0 reserver-orin-industrial external
これでボードへのシステムイメージのフラッシュが開始されます。フラッシュが成功すると、次のような出力が表示されます
- Step 2: ボードを HDMI コネクタ経由でディスプレイに接続し、初期設定を完了します
その後、ボードは再起動し、次の画面が表示されます
- Step 3: デバイス上でターミナルウィンドウを開き、次を実行します。デバイスは再起動し、使用できる状態になります!
systemctl disable nvgetty.service
sudo depmod -a
sudo reboot
さらに、CUDA、cuDNN、TensorRT などの SDK コンポーネントをインストールしたい場合は、次を実行してください
sudo apt update
sudo apt install nvidia-jetpack -y
ハードウェアおよびインターフェースの使用方法
reServer Industrial ボード上のすべてのハードウェアおよびインターフェースの使用方法について詳しく知るには、このwikiに従ってください:
リソース
(リンクを変更してください)
- reServer Industrial データシート
- reServer Industrial リファレンスガイド
- NVIDIA Jetson デバイスおよびキャリアボードの比較
- reServer Industrial 3D ファイル
技術サポート
ご不明な点がありましたら、遠慮なく私たちのフォーラムに issue を投稿してください。
