reTerminal E10-1 入門ガイド
必要な材料
| reTerminal | reTerminal E10-1 |
|---|---|
 |  |
| 今すぐ入手 | 今すぐ入手 |
事前準備
接続
向きに注意して reTerminal を reTerminal E10-1 上に載せ、しっかりと密着するまで押し込みます。このとき reTerminal E10-1 の電源が入っていれば、reTerminal は起動してシステムが立ち上がります。reTerminal について詳しく知りたい場合は、reTerminal をクリックしてください。
取り付けと取り外し
reTerminal E10-1 を使用する過程で、周辺機器を追加するために筐体を取り外す必要がある場合があります。
ドライバのインストール
reTerminal で reTerminal E10-1 の機能を使用するには、最初に reTerminal 用のドライバをインストールする必要があります。reTerminal のターミナルウィンドウで次のコマンドに従ってください。
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays.git
cd seeed-linux-dtoverlays
sudo ./scripts/reTerminal.sh
32bit OS の場合は、sudo ./scripts/reTerminal.sh を実行する前に、次の手順を追加する必要があります
echo arm_64bit=0 | sudo tee -a /boot/config.txt
インストールが完了したら、マシンを再起動してください。その後、次のコマンドを使用して reTerminal-bridge.dtbo ファイルが存在するかどうかを確認し、ドライバのインストールが完了していることを確認します。
ls /boot/overlays/reTerminal-bridge.dtbo

ライブラリのインストール
python3 ライブラリをインストールします。
sudo apt-get update
sudo apt-get install python3-pip
sudo pip3 install RPi.GPIO
sudo apt-get install python3-serial
git ライブラリをインストールします。
sudo apt install -y git
電源供給
電源供給には、次の 3 つの方法があります。
- DC ジャック
- PoE
- UPS -18650 バッテリー
本機のバッテリーは NCR18650B 充電式リチウムイオンバッテリーです。パッケージにはバッテリーが含まれていないことにご注意ください。バッテリーは一般的なコンビニエンスストアで入手可能で、お客様ご自身でご用意いただく必要があります。推奨品は Panasonic NCR18650B 3.6V 3400mAh です。
DC ジャック
DC 12V @4A で reTerminal、拡張ボード、およびバッテリーに電源を供給します。
PoE
PoE 電源入力は RJ45 で、最大 25W の電力入力をサポートします。
UPS -18650 バッテリー
固定ピン付きバッテリーホルダー x2。
ファン
必要な材料
- reTerminal x1
- reTerminal E10-1 x1
- ファン(同梱) x1
高負荷時でも reTerminal と reTerminal E10-1 を正常な温度レベルに保つために、reTerminal E10-1 の内部には 3 ピンファンが搭載されています。

この例では、reTerminal E10-1 上のファンを制御する方法を紹介します。
ステップ 1. 次のコマンドでファンのオン/オフを直接制御できます。
#Toggle fan on
raspi-gpio set 23 op pn dh
#Toggle fan off
raspi-gpio set 23 op pn dl
ステップ 2. CPU の温度を検出してファンを有効/無効にすることもできます。以下の手順に従ってプログラムをダウンロードして実行してください。
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_Fan_control.git
cd Seeed_reTerminal_Bridge_Fan_control/
sudo python3 fan.py
参考用に fan.py のコードを示します。
import sys
import time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
MAX_TEMP = 40.0
MIN_TEMP = 20.0
def cpu_temp():
f = open("/sys/class/thermal/thermal_zone0/temp",'r')
return float(f.read())/1000
def main():
channel = 23
GPIO.setmode(GPIO.BCM)
# init 23 off
GPIO.setup(channel,GPIO.OUT,initial=GPIO.LOW)
is_close = True
while 1:
temp = cpu_temp()
if is_close:
if temp > MAX_TEMP:
GPIO.output(channel,GPIO.HIGH)
is_close = False
else:
if temp < MIN_TEMP:
GPIO.output(channel,GPIO.LOW)
is_close = True
time.sleep(2.0)
GPIO.setwarnings(False)
if __name__ == '__main__':
main()
コードが正常に実行されると、CPU 温度が 40°C を超えたときにファンがオンになり、温度が 20°C 未満になるとファンがオフになります。
CAN 通信
Controller Area Network(CAN)は、ホストコンピュータなしでマイクロコントローラやデバイス同士のアプリケーション間通信を可能にする、堅牢な車載バス規格です。
必要な材料
- reTerminal x2
- reTerminal E10-1 x2
- オス-オスケーブル x2
この例では、reTerminal E10-1 上で CAN を使用する方法を紹介します。
ステップ 1. オス-オスケーブルを使用して、CAN インターフェース経由で 2 台の reTerminal E10-1 を接続します。
H -> H L -> L GND -> GND
ステップ 2. 2 台の reTerminal それぞれに CAN-utils をインストールします。
sudo apt install can-utils
CAN-utils は、CAN インターフェースを使用する非常に有用なデバッグツールのコレクションです。次のようなアプリケーションが含まれます。
- candump – CAN パケットのダンプ – 表示、フィルタリング、およびディスクへのログ保存。
- canplayer – CAN ログファイルの再生。
- cansend – 単一フレームの送信。
- cangen – ランダムトラフィックの生成。
- canbusload – 現在の CAN バス使用率の表示。
CAN-utils のソースコードは GitHub リポジトリ から入手できます。
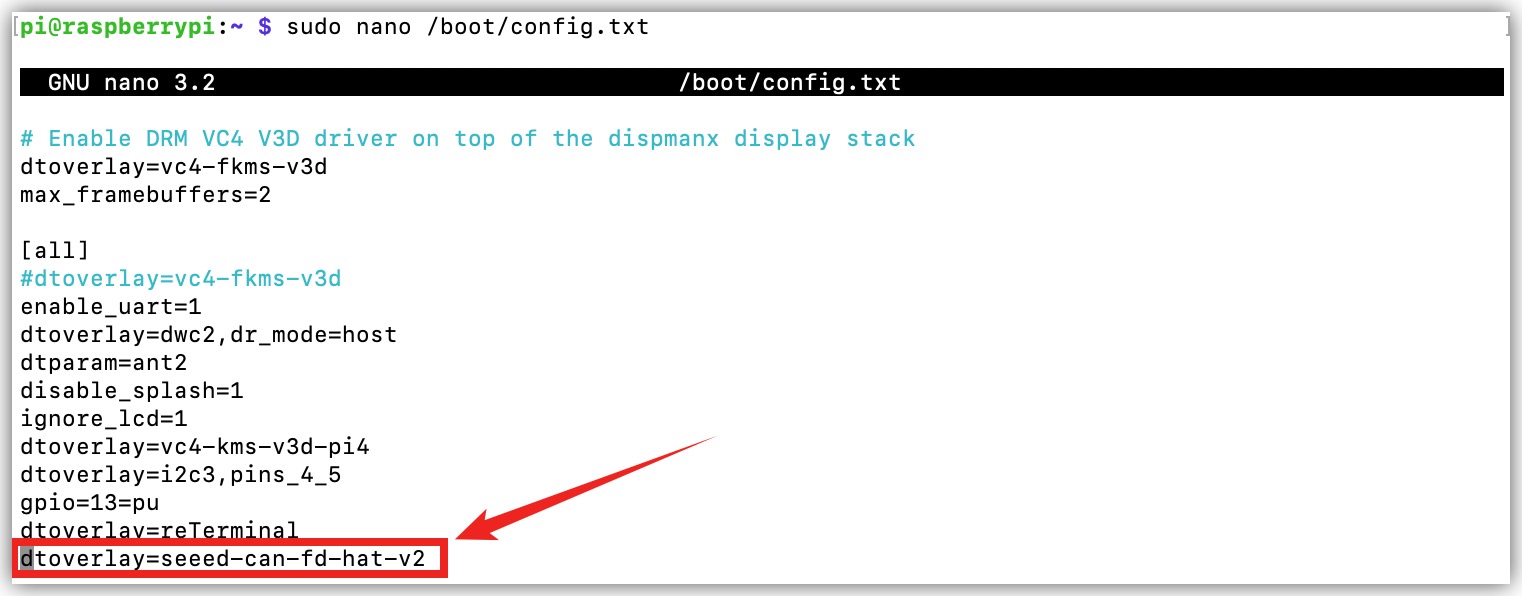
ステップ 3. 2 台の reTerminal に設定情報を追加します。エディタで /boot/config.txt ファイルを開き、末尾に dtoverlay=seeed-can-fd-hat-v2 を追加して保存し、その後 reTerminal を再起動します。
ハードウェアを指定する ID EEPROM が「hat」に搭載されていない場合、Linux カーネルは SPI インターフェース上の CAN コントローラを自動的に検出しません。適切なドライバを読み込むには、起動時にデバイスツリーオーバーレイの設定を指定する必要があります。
sudo nano /boot/config.txt
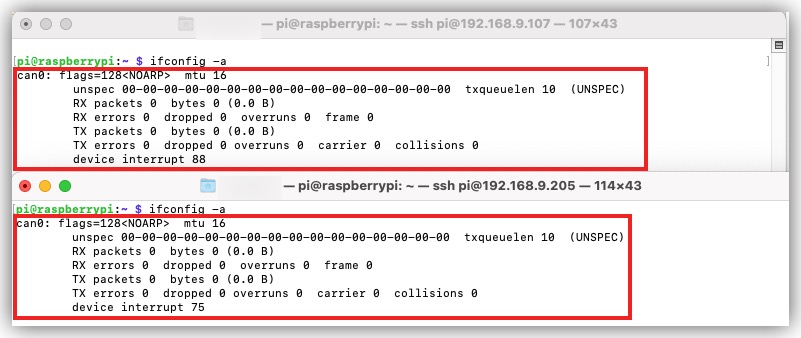
ステップ 4. CAN インターフェースはネットワークインターフェースと同様に動作します。ifconfig -a(インターフェース設定)を使用して、さまざまな統計情報を取得できます。
コマンド cangen can0 -v を使用してランダムデータを送信し、CAN 通信が正常に行われているかテストします。
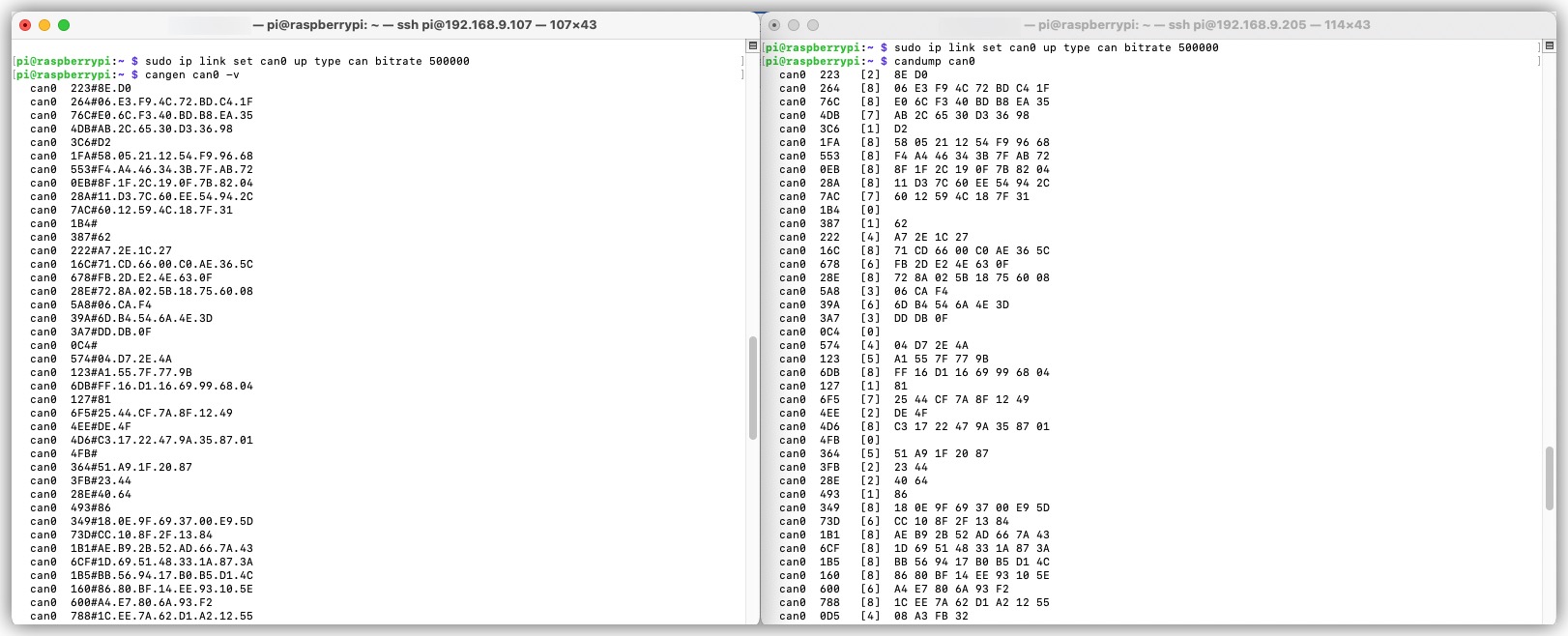
ステップ 5. 次のコマンドで CAN インターフェースを手動で有効化できます。
sudo ip link set can0 up type can bitrate 500000
ステップ 6. コード を reTerminal にダウンロードします。
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_CAN_exmaple
一方の reTerminal では、データを送信するコードをコンパイルして実行します。
cd Seeed_reTerminal_Bridge_CAN_exmaple/
gcc cantransmit.c -o cantransmit
参考用に cantransmit.c のコードを示します。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
frame.can_id = 0x555;
frame.can_dlc = 5;
sprintf(frame.data, "Hello");
if (write(s, &frame, sizeof(struct can_frame)) != sizeof(struct can_frame)) {
perror("Write");
return 1;
}
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
もう一方の reTerminal では、データを受信するコードをコンパイルして実行します。
gcc canreceive.c -o canreceive
参考用に canreceive.c のコードを示します。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
2台のreTerminalがCANインターフェースを介してデータの送受信に成功していることが分かります。
読み取りに加えて、関連性のないCANフレームをフィルタリングしたい場合もあるでしょう。これはドライバレベルで行われ、ユーザーモードアプリケーションで各フレームを読み取るよりも効率的です。
gcc canfilter.c -o canfilter
参考として、canfilter.c のコードを以下に示します。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Filter Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
/*
To set up a filter, initialise a single can_filter structure or array of
structures and populate the can_id and can_mask. The call setsockopt():
*/
struct can_filter rfilter[1];
rfilter[0].can_id = 0x550;
rfilter[0].can_mask = 0xFF0;
//rfilter[1].can_id = 0x200;
//rfilter[1].can_mask = 0x700;
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
// And finally, if there is no further need for the socket, close it:
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
ほとんどのCANコントローラには、シリコン(ハードウェア)内にアクセプタンスフィルタとマスクが含まれています。残念ながら、現在のアーキテクチャではフィルタリングはカーネル内で実行され、最適とは言えませんが、それでもすべてのフレームをユーザーモードアプリに渡すよりは優れています。
RS485 通信
RS485は、TIA-485(-A) または EIA-485 とも呼ばれ、シリアル通信システムで使用されるドライバおよびレシーバの電気的特性を定義する規格です。電気信号はバランス型であり、マルチポイントシステムをサポートします。この規格を実装したデジタル通信ネットワークは、長距離や電気的ノイズの多い環境でも効果的に使用できます。このようなネットワークには、線形のマルチドロップバスとして複数のレシーバを接続できます。
必要な材料
この例では、reTerminal E10-1 上でRS485を使用する方法を紹介します。
ステップ 1. RS485機能はttyS0を使用するため、開始する前にttyS0のシステム対話機能を無効にする必要があります。
sudo raspi-config
順に Interface Options、Serial port を選択します。
次の画面で、シリアル経由でアクセス可能なログインシェルを有効にするかどうかを尋ねられるので、No を選択します。
次に “Do you want to use serial port hardware” で、Yes が選択されていることを確認します。
reTerminal が変更を適用すると、画面に次のようなテキストが表示されます。
ステップ 2. ケーブルを使用して、RS485インターフェース経由でreTerminal E10-1をコンピュータに接続します。
A -> A B -> B GND -> GND
ステップ 3. コマンド dmesg | grep tty を使用してシリアルポート名を確認します。コンピュータとのRS485通信に使用するシリアルポート名を特定します。これはコンピュータによって異なる場合がありますが、一般的には ttyS0 です。

ステップ 4. code をreTerminalにダウンロードします。
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS485_exmaple
cd Seeed_reTerminal_Bridge_RS485_exmaple/
コンピュータでシリアルポートソフトウェアを開きます。コマンド sudo python3 rs485.py を実行すると、次のような結果が得られます。
同時に、メッセージを受信してから5秒以内であれば、シリアルポートアシスタントを介してreTerminalに16バイトのデータを送信することもできます。
参考として、rs485.py のコードを以下に示します。
import serial, time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
GPIO.setmode(GPIO.BCM)
ser = serial.Serial()
ser.port = "/dev/ttyS0"
channel1 = 25
channel2 = 17
#9600,N,8,1
ser.baudrate = 9600
ser.bytesize = serial.EIGHTBITS #number of bits per bytes
ser.parity = serial.PARITY_NONE #set parity check
ser.stopbits = serial.STOPBITS_ONE #number of stop bits
ser.timeout = 0.5 #non-block read 0.5s
ser.writeTimeout = 0.5 #timeout for write 0.5s
ser.xonxoff = False #disable software flow control
ser.rtscts = False #disable hardware (RTS/CTS) flow control
ser.dsrdtr = False #disable hardware (DSR/DTR) flow control
GPIO.setup(channel1,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(channel2,GPIO.OUT,initial=GPIO.LOW)
try:
ser.open()
except Exception as ex:
print ("open serial port error " + str(ex))
exit()
if ser.isOpen():
try:
ser.flushInput() #flush input buffer
ser.flushOutput() #flush output buffer
GPIO.output(channel1,GPIO.HIGH)
GPIO.output(channel2,GPIO.HIGH)
time.sleep(0.1)
#write data
ser.write("rs485 communication is on, you can try to send data...\n".encode())
print("Sent successfully\n")
GPIO.output(channel2,GPIO.LOW)
time.sleep(5) #wait 5s
#read data
response = ser.read(16)
print("read 16 byte data:")
print(response)
ser.close()
except Exception as e1:
print ("communicating error " + str(e1))
else:
print ("open serial port error")
RS232 通信
RS-232(Recommended Standard 232)は、もともと1960年にデータのシリアル通信伝送のために導入された規格です。DTE と DCE 間を接続する信号を正式に定義しています。RS-422、RS-485、Ethernet などの後発インターフェースと比較すると、RS-232 は伝送速度が遅く、最大ケーブル長が短く、電圧スイングが大きく、標準コネクタが大きく、マルチポイント機能がなく、マルチドロップ機能も限定的です。
必要な材料
この例では、reTerminal E10-1 上でRS232を使用する方法を紹介します。
ステップ 1. RS485機能はttyS0を使用するため、開始する前にttyS0のシステム対話機能を無効にする必要があります。
sudo raspi-config
順に Interface Options、Serial port を選択します。
次の画面で、シリアル経由でアクセス可能なログインシェルを有効にするかどうかを尋ねられるので、No を選択します。
次に “Do you want to use serial port hardware” で、Yes が選択されていることを確認します。
reTerminal が変更を適用すると、画面に次のようなテキストが表示されます。
ステップ 2. ケーブルを使用して、RS232インターフェース経由でreTerminal E10-1をコンピュータに接続します。
ステップ 3. コマンド dmesg | grep tty を使用してシリアルポート名を確認します。コンピュータとのRS232通信に使用するシリアルポート名を特定します。これはコンピュータによって異なる場合がありますが、一般的には ttyS0 です。
ステップ 4. code をreTerminalにダウンロードします。
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS232_exmaple
cd Seeed_reTerminal_Bridge_RS232_exmaple/
reTerminalの一方で、データを送信するコードをコンパイルして実行します。
sudo python3 rs232_send.py
参考として、rs232_send.py のコードを以下に示します。
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0', # Please modify here according to the serial port name displayed by reTerminal
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
counter=0
try:
print("rs232 starts now!\n")
ser.write("rs232 starts now!\n".encode())
while 1:
ser.write(("Write counter:{}\n".format(counter)).encode())
time.sleep(1)
counter += 1
except KeyboardInterrupt:
exit()
もう一方のreTerminalで、データを受信するコードをコンパイルして実行します。
sudo python3 rs232_receive.py
参考用に rs232_receive.py コードを以下に示します。
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0',
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
try:
print("Start receiving data now!\n")
while 1:
x=ser.readline()
if x != b'':
print(x)
except KeyboardInterrupt:
exit()
Ethernet
必要な材料
- reTerminal x1
- reTerminal E10-1 x1
この例では、reTerminal E10-1 上で Ethernet 接続をテストする方法を紹介します。
ステップ 1. reTerminal とコンピュータ用に iperf3 をダウンロードします。
git clone https://github.com/esnet/iperf.git
ステップ 2. 次のコードを使用して iperf3 をインストールします
cd iperf
sudo ./configure
sudo make
sudo make install
ステップ 3. reTerminal をサーバーとして使用します。
iperf3 -s
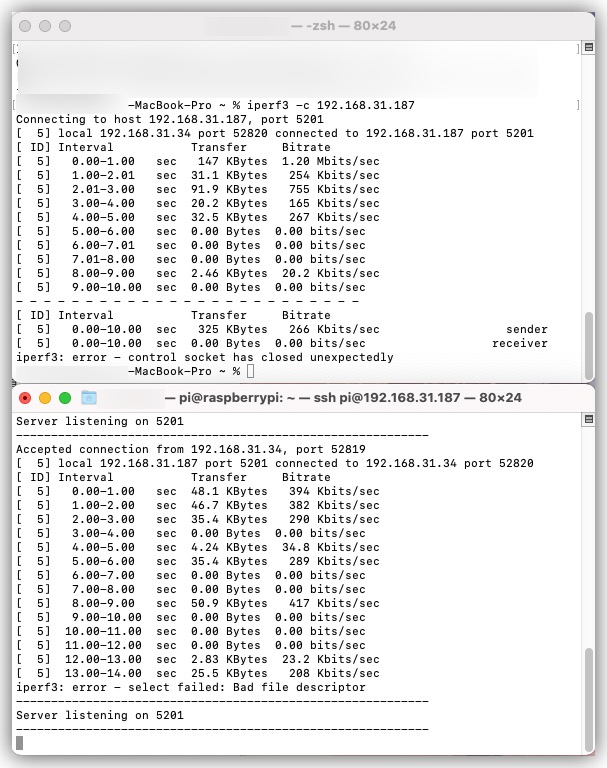
コンピュータを使用して、reTerminal に接続されたネットワーク速度をテストします。このとき、コンピュータと reTerminal を同じローカルエリアネットワーク内に保ってください。
iperf3 -c 192.168.xxx.xxx
上記の "192.168.xxx.xxx" アドレスは reTerminal のアドレスです。
例えば、ここでは reTerminal の IP アドレスは 192.168.31.187 です:
iperf3 -c 192.168.31.187
より多くのネットワークテスト機能を実行する必要がある場合は、iperf プロジェクト Web サイト上のクエリパラメータの使用方法を参照してください。
WM1302 (USB/SPI) LoRaWAN Gateway
必要な材料
USB モジュールと SPI モジュールの違いは次のとおりです:

この例では、reTerminal E10-1 上で WM1302 LoRaWAN Gateway を使用する方法を紹介します。
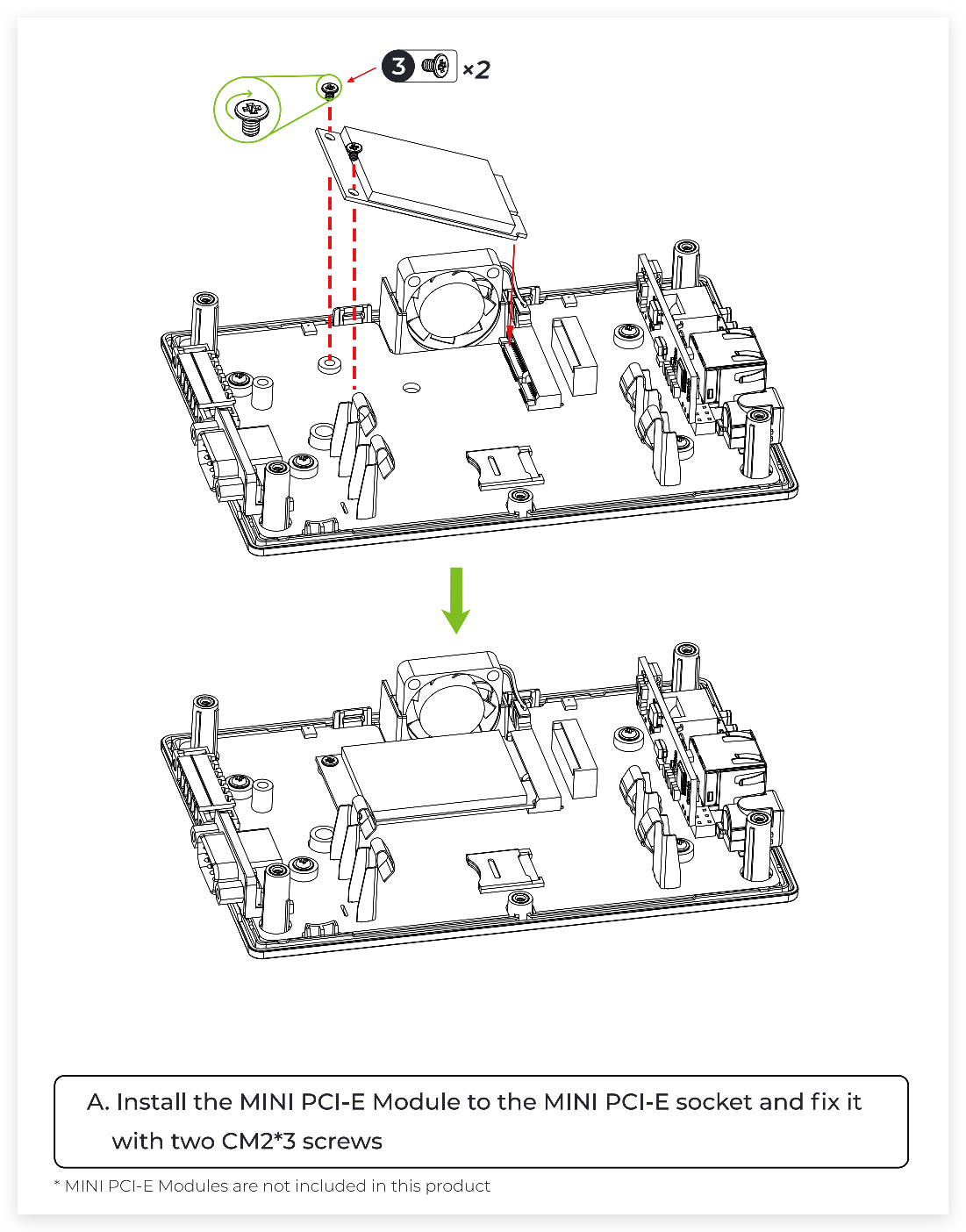
ステップ 1. WM1302 モジュールを reTerminal E10-1 に取り付け、ネジで固定します。

その後、ファンの横にあるボタンを PCIE に回します。

ステップ 2. コマンドラインで sudo raspi-config と入力して Rasberry Pi Software Configuration Tool を開きます:
- Interface Options を選択
- SPI を選択し、Yes を選択して有効にします
- I2C を選択し、Yes を選択して有効にします
- Serial Port を選択し、"Would you like a login shell..." には No を選択し、"Would you like the serial port hardware..." には Yes を選択します
その後、これらの設定が有効になるように Raspberry Pi を再起動してください。
ステップ 3. WM1302 code を reTerminal にダウンロードしてコンパイルします。
git clone https://github.com/Lora-net/sx1302_hal
cd sx1302_hal
sudo make
ステップ 4. リセットスクリプトを設定します。まずファイルを sx1302_hal/packet_forwarder にダウンロードし、次のコマンドを使用します
cd sx1302_hal/packet_forwarder
wget https://files.seeedstudio.com/wiki/reTerminal_Bridge/reset_lgw.sh
次に、お使いの WM1302 バージョンに応じて、以下のコードテストを実行します。
USB version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
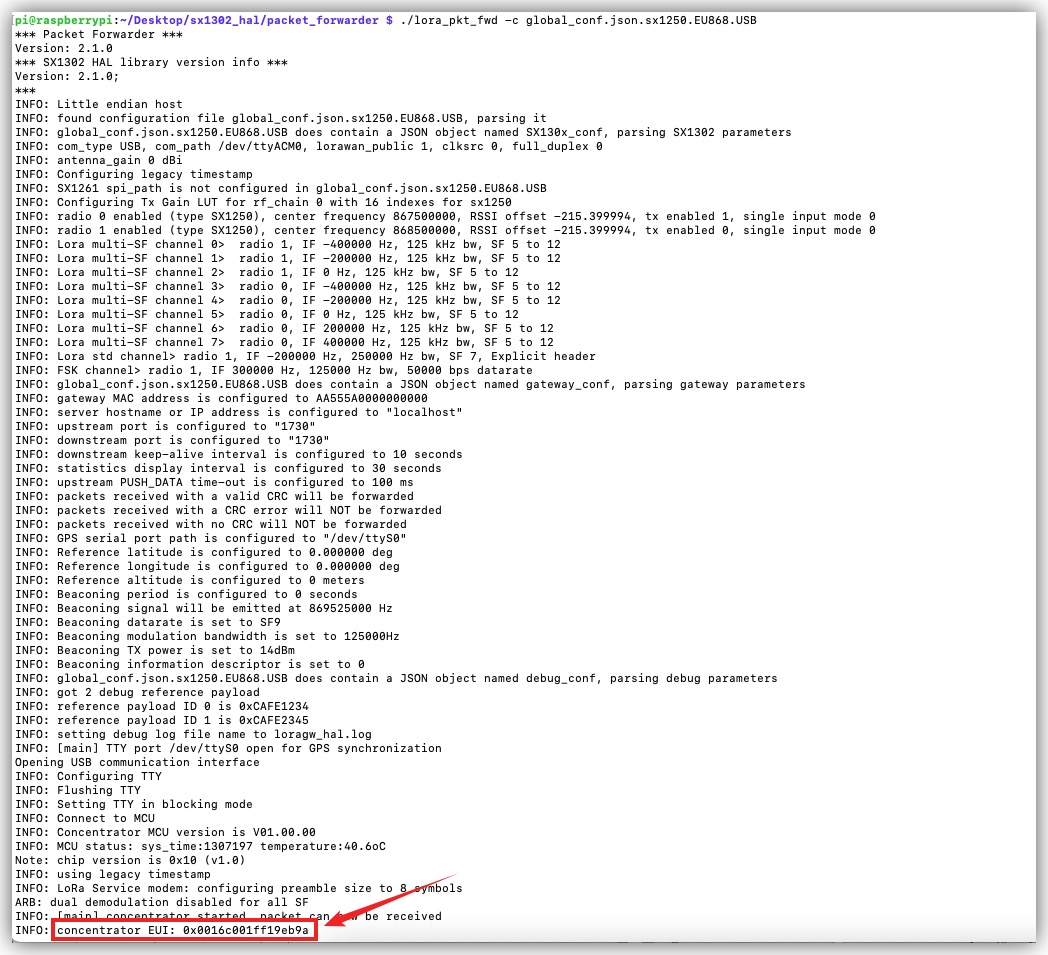
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
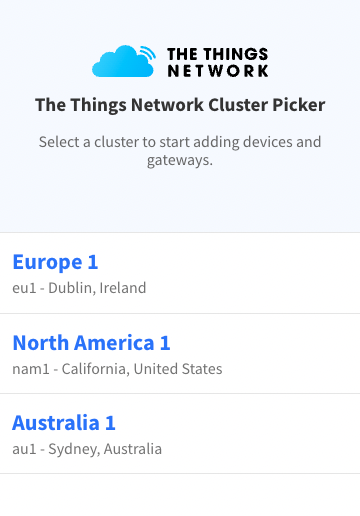
ステップ 5. TTN website にサインアップしてアカウントにログインします。まだアカウントがない場合は登録してください。その後 Gateway インターフェースに入り、"Get Starting" をクリックします
自分の地域を選択します。
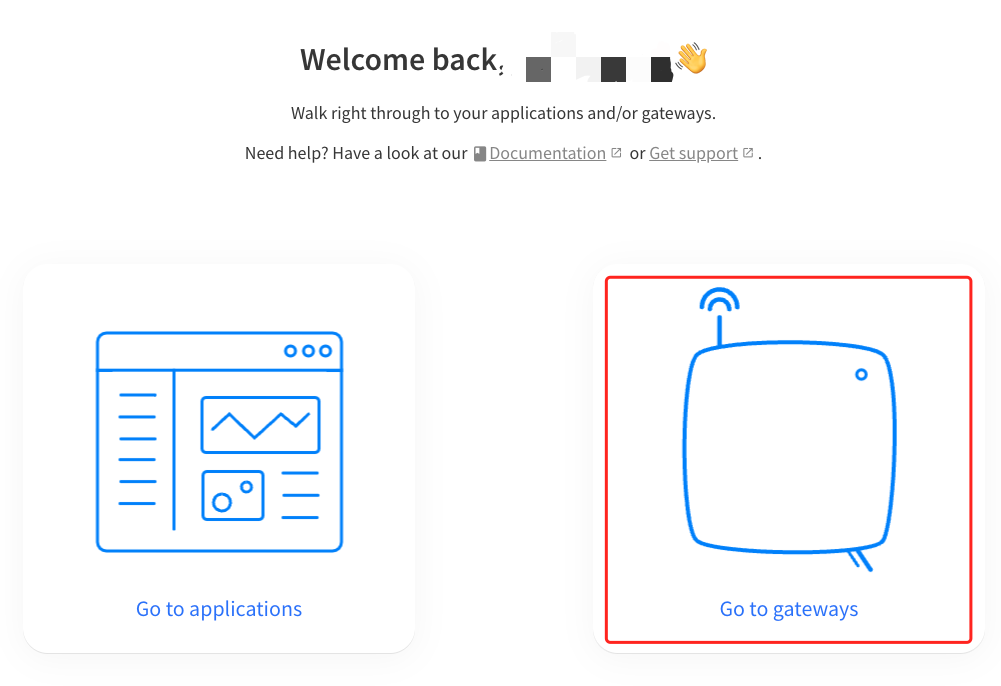
"Go to gateways" を選択します
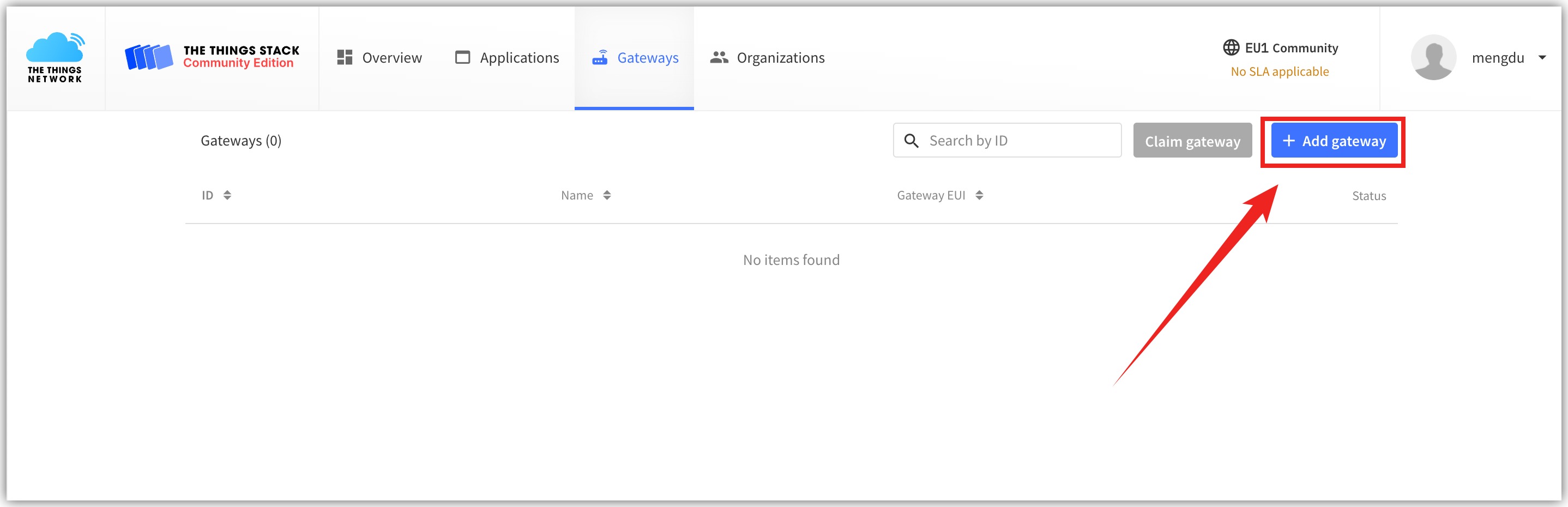
デバイスを追加するには Add gateway をクリックします:
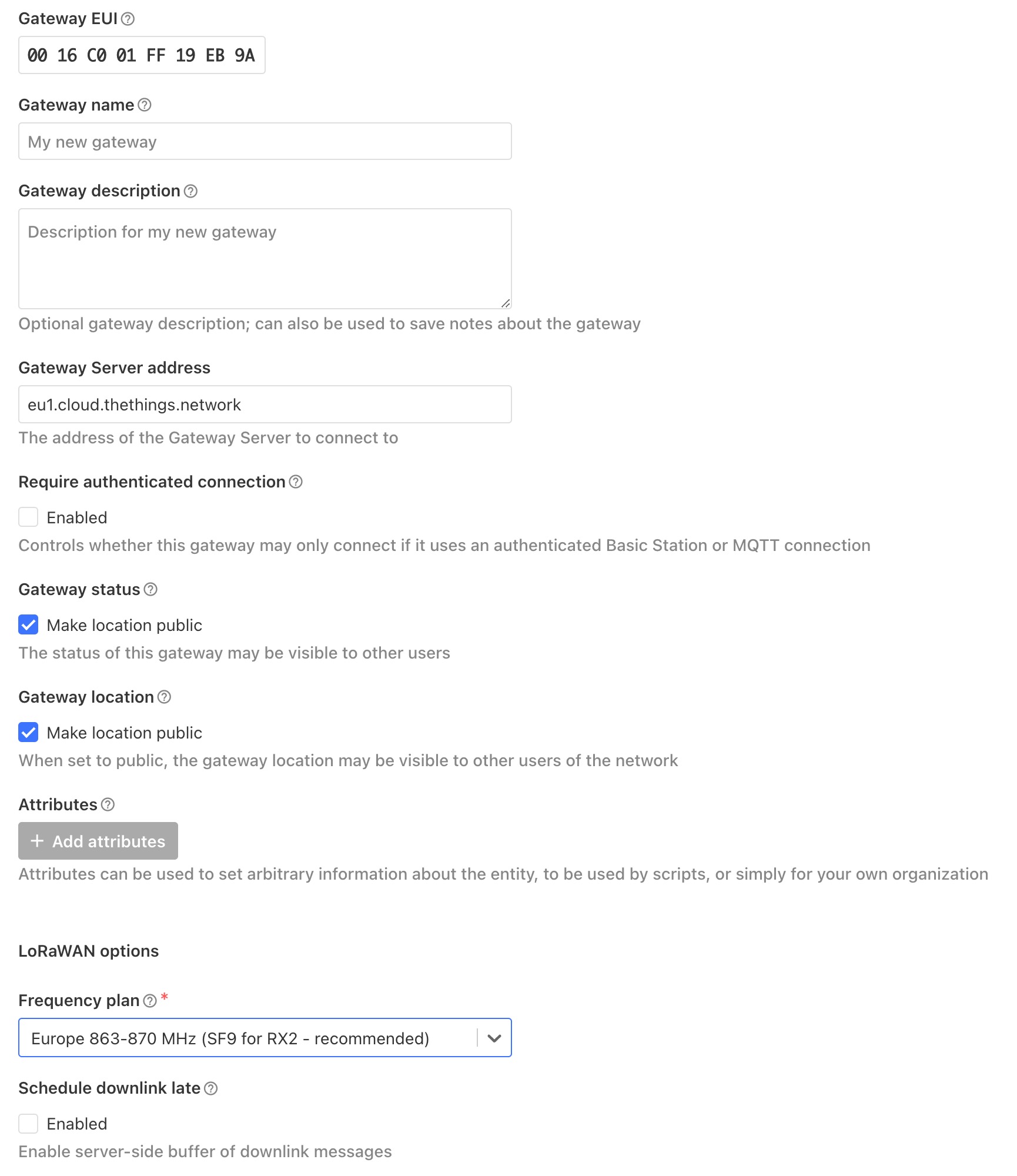
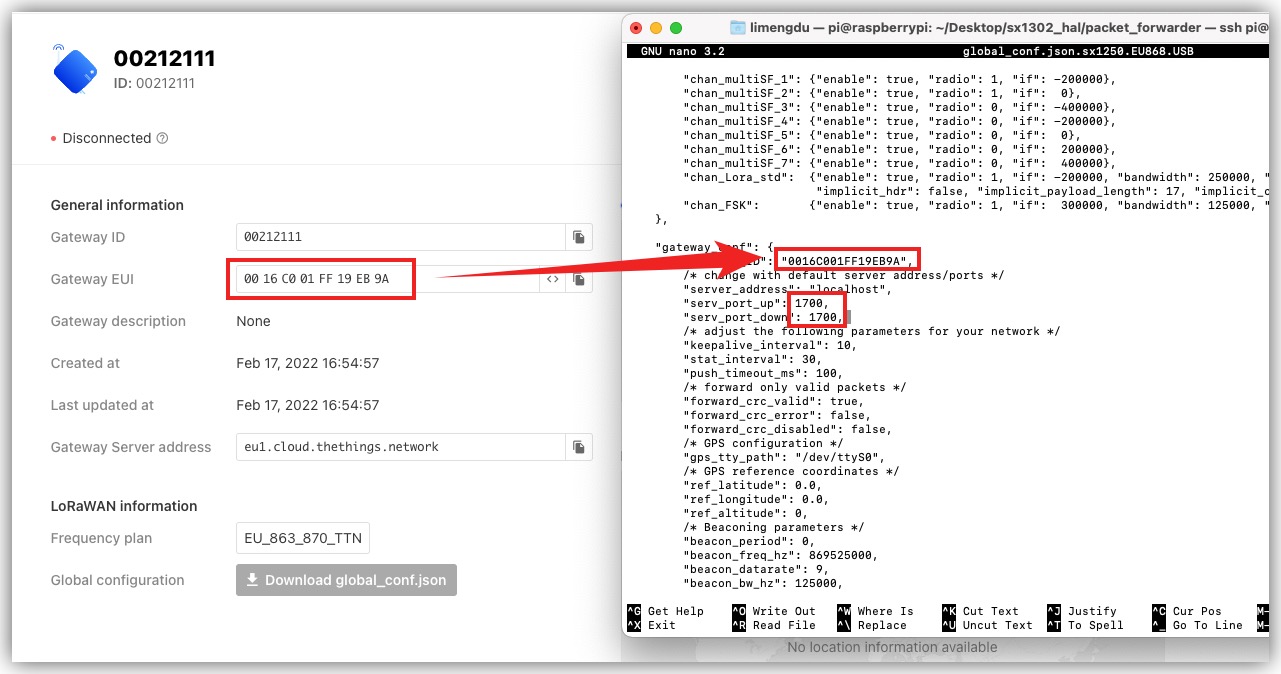
その中で、Gateway EUI の値は ステップ 4 でテストを実行したときにログに表示されます。Lora options の Frequency plan(ヨーロッパ版を例とします)では Europe 863-870 MHz (SF9 for RX2 - recommended) を選択します。その後 Create gateway をクリックします。
ステップ 6.(ヨーロッパ版を例とします) SPI バージョンの場合、sx1302_hal/packet_forwarder 内の global_conf.json.sx1250.EU868 を編集します。
USB バージョンの場合、sx1302_hal/packet_forwarder 内の global_conf.json.sx1250.EU868.USB を編集します。
対応するファイル内で gateway_conf を検索します。
-
その後、後ろの gateway_ID を Web ページで入力した Gateway EUI に変更します。
-
server_address を Web ページ内の Gateway Server address に変更します。
-
serv_port_up と serv_port_up の両方を 1700 に変更します。
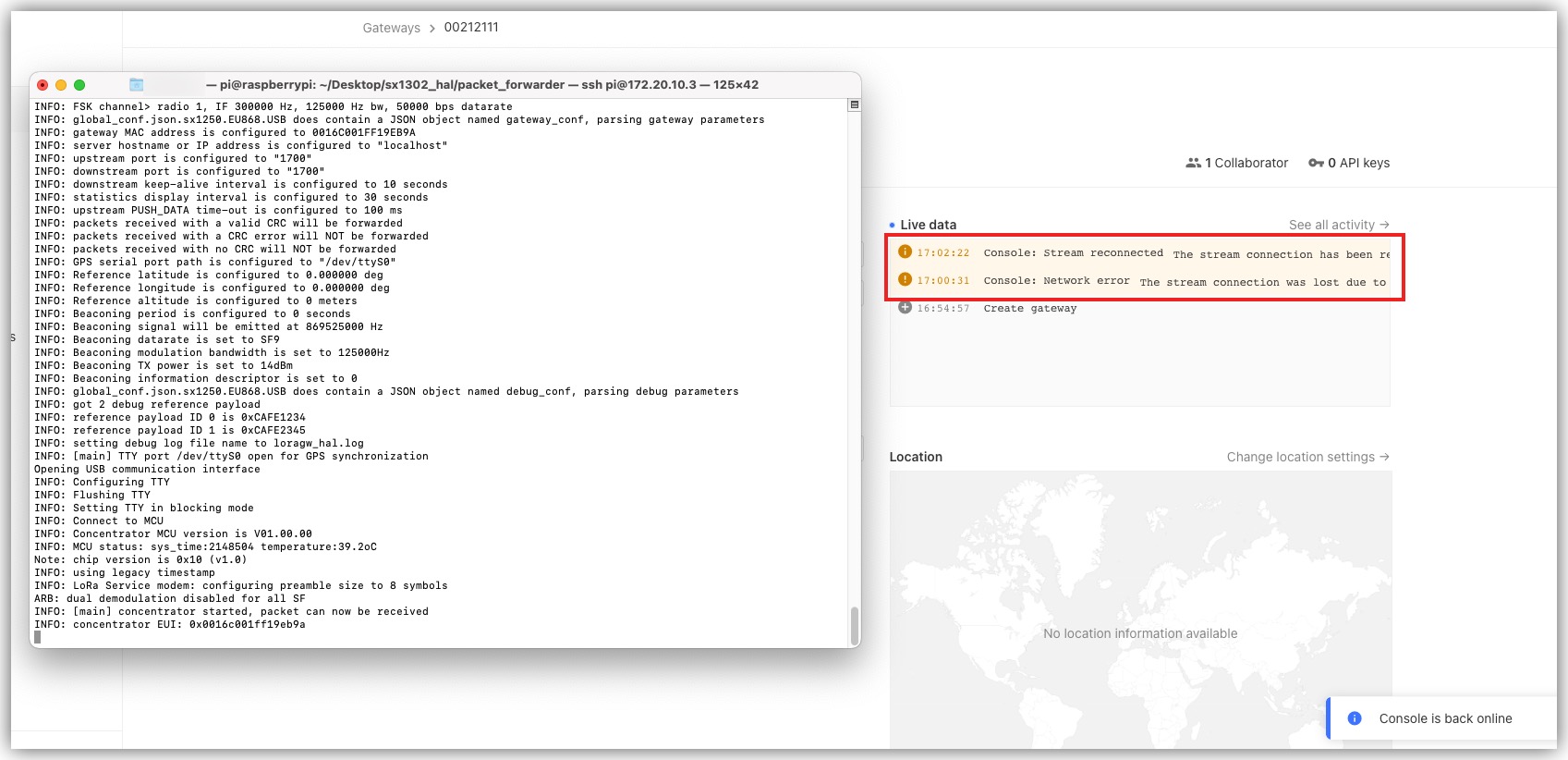
ステップ 7. ステップ 4 のコマンドを再度実行すると、その後 Web ページ上でデバイスの接続情報を確認できます。
USB version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
上記のチュートリアルは WM1302 のヨーロッパ版に基づいています。WM1302 の US 版を使用している場合、手順は概ね同じですが、チュートリアル内で変更および実行するファイルが異なります。ファイル名は、購入したバージョンおよび次のページを参照してください。
Hard Drive Expansion
必要な材料
- reTerminal x1
- reTerminal E10-1 x1
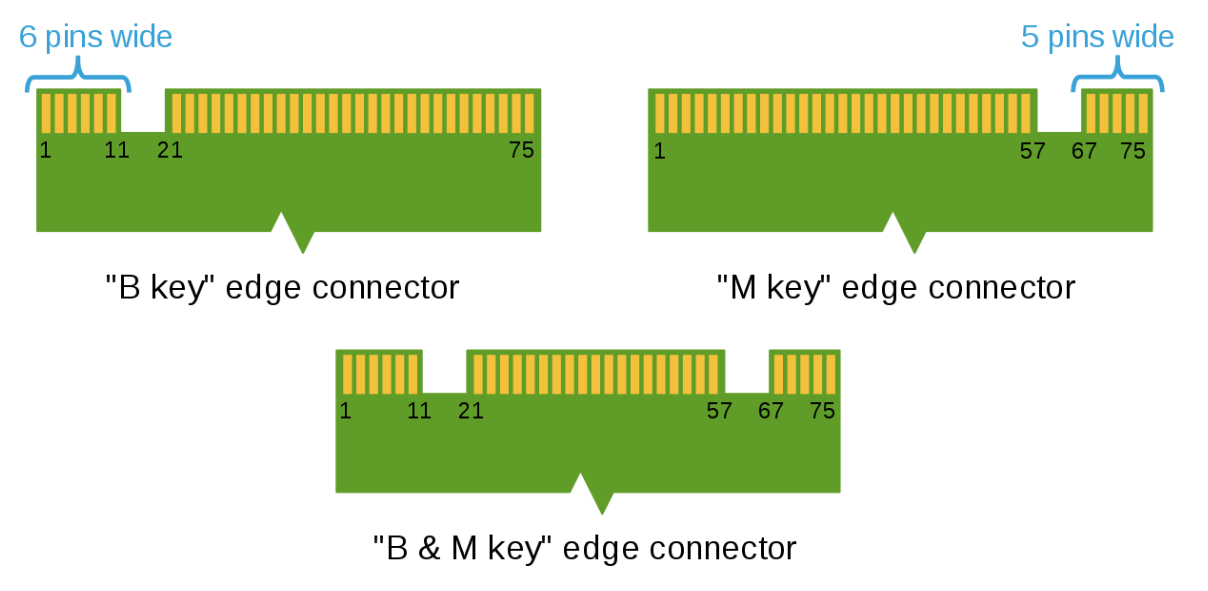
- M.2 B key Connector x1
この例では、reTerminal E10-1 上でハードディスクを取り付けて動作を確認する方法を紹介します。
ステップ 1. reTerminal E10-1 の背面カバーを開け、M.2 SSD を Mini-PCIe Connector に挿入してネジで固定します。背面カバーを閉じ、reTerminal を接続して電源を入れます。
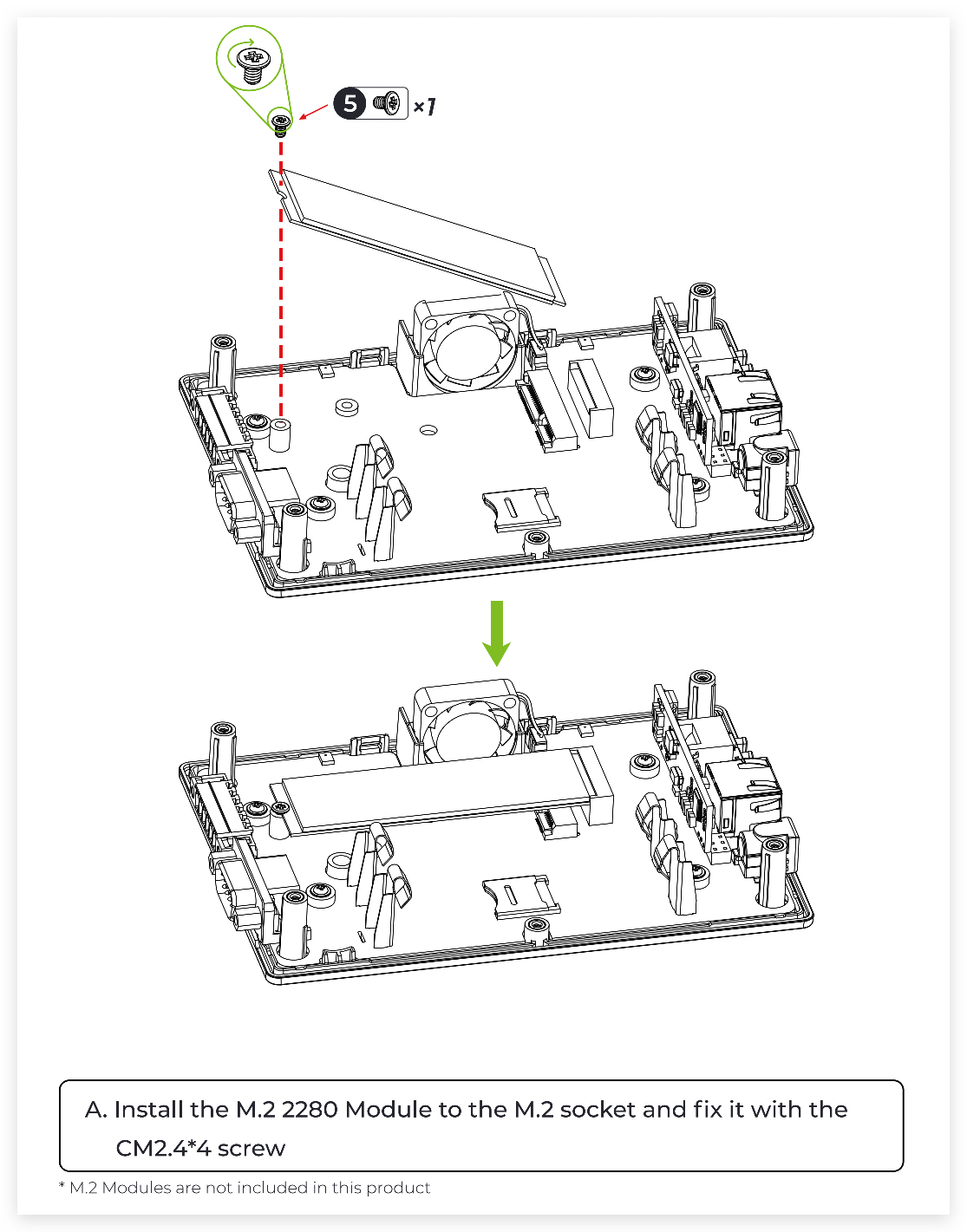

その後、ファンの横にあるボタンを M.2 に回します。

ステップ 2. SSD ストレージデバイスが検出されているかどうかを確認するためにコマンドを入力します。
sudo fdisk -l
ステップ 3. また、dd コマンドを使用してハードドライブの読み書き速度をテストすることもできます。
Read
$ sudo dd if=/dev/sda3 of=/dev/null bs=512k count=500
Write
$ sudo dd if=/dev/zero of=/dev/sda3 bs=512k count=500
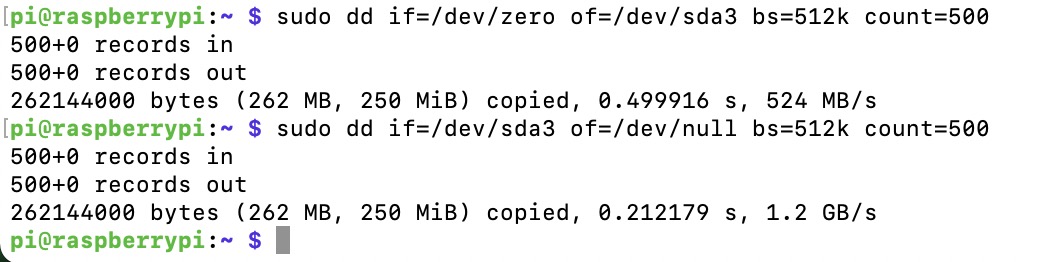
M.2 B key を使用していることを確認してください。
ハードドライブをフォーマットする
次のステップでは、reTerminal E10-1 に接続した SSD 上のすべてのデータが消去されます。また、誤ったドライブメディアを選択した場合も同様です。そのため、以下の手順を慎重に実行し、それぞれのステップの目的を理解していることを必ず確認してください。
- 使用するソフトウェアツール:
lsblk,fdisk,mkfs,mount,umount
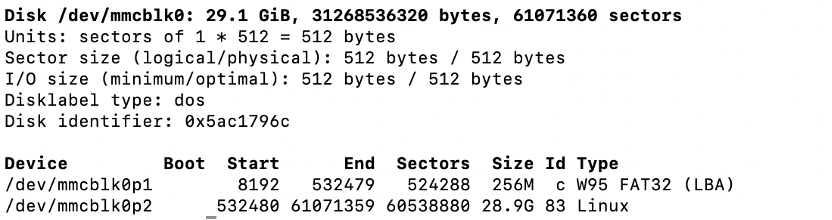
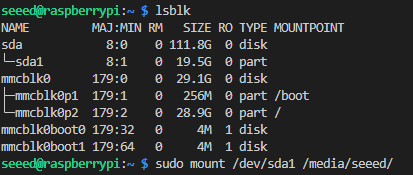
ステップ 1. SSD デバイス名を見つける SSD を reTerminal E10-1 に接続し、reTerminal に取り付けたら、システムの電源が入った後にターミナルを開き、次のコマンドを入力します:
lsblk
次のような表示がされるはずです:
ステップ 2. fdisk を使用して SSD をパーティション分割する
このステップを実行すると、reTerminal E10-1 に接続した SSD 上のデータは失われます。
上記のステップに続いて、ターミナルに次のコマンドを入力します。/dev/sdX の X はフォーマット対象として選択した SSD デバイス名 であることに注意してください。正しいデバイス名に自信がない限り、reTerminal に他の USB ドライブが接続されていないことを確認してください。
sudo fdisk /dev/sdX
例えば、ここでは次のようになります:
sudo fdisk /dev/sda
次のような表示がされるはずです:
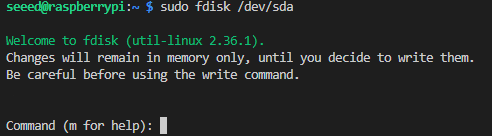
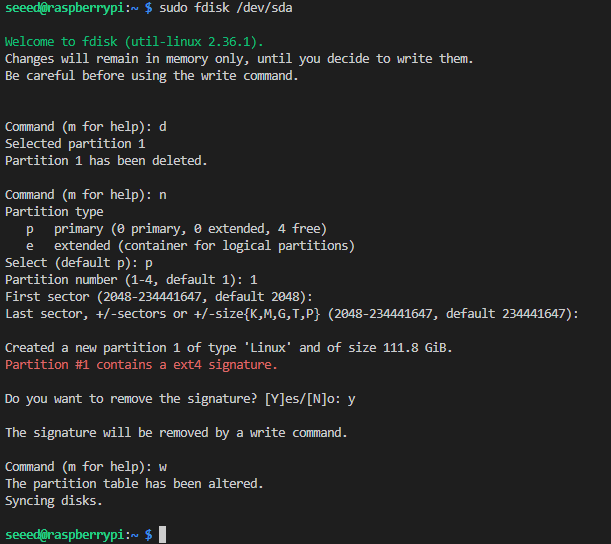
fdisk プロンプトで次を実行します:
Welcome to fdisk (util-linux 2.36.1).
Changes will remain in memory only, until you decide to write them.
Be careful before using the write command.
Command (m for help):
まず SSD デバイス上のパーティションを削除するために d と入力します。
次に SSD デバイス上に新しいパーティションを作成するために n と入力します。
その後、次のメッセージが表示されるはずです:
Partition type
p primary (0 primary, 0 extended, 4 free)
e extended (container for logical partitions)
プライマリパーティションを作成するために p と入力し、その後 1 を入力します。
次に First sector では、ドライブの先頭セクタを使用するデフォルト値を使う場合は ENTER を押します。または、SSD 上のパーティション 1 を開始したい特定のセクタ位置を指定することもできます。ここではデフォルト値を使用するために ENTER を押しました。
次にパーティション 1 の最後のセクタを選択します。パーティション 1 にドライブ全体の容量を割り当てたい場合は ENTER を押します。または、パーティション 1 の終了セクタ位置を指定することもできます。これは作成するパーティション 1 のストレージサイズを意味します。
次に署名を削除するために Y を押します。
その後、変更を書き込んで fdisk プロンプトを終了するために w を入力します。
以下はこのプロセスの例です:
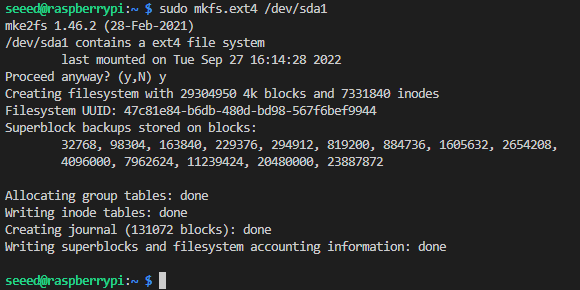
ステップ 3. SSD パーティションを ext4 形式でフォーマットする ここまでで SSD にパーティションを作成したので、マウントして使用できるように、そのパーティションを ext4 形式でフォーマットする必要があります。これには mkfs.ext4 を使用します:
sudo mkfs.ext4 /dev/sdXX
同様に sdXX は SSD のデバイス名です。ここでは /dev/sda1 を次のように使用しています:
sudo mkfs.ext4 /dev/sda1
そして Proceed anyway? (y,N) と表示されたら y と ENTER を入力し、処理が完了するまで数秒待ちます。
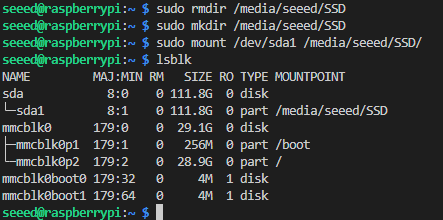
ステップ 4. パーティションをマウントする これで SSD をマウントして、追加ストレージ用の外部ディスクとして使用できます。
sudo mkdir /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
sudo mount /dev/sdXX /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
ここで "YOUR USER NAME" は reTerminal システムのユーザー名、"THE NAME YOU WANT TO MOUNT THE DRIVE" はドライブをマウントするために作成する名前、/dev/sdXX はマウントしたい SSD パーティションのデバイス名です。
例えば、ここでは次のようになります:
sudo mkdir /media/seeed/SSD
sudo mount /dev/sda1 /media/seeed/SSD/
SSD が正常にマウントされたかどうかを確認するには次を実行します:
lsblk
次のような出力が表示されるはずです。ここで /dev/sda1 が /media/seeed/SSD にマウントされています:
EC25-EUX 4G モジュール
必要なもの
- reTerminal x1
- reTerminal E10-1 x1
- EC25-EUX 4G モジュール x1
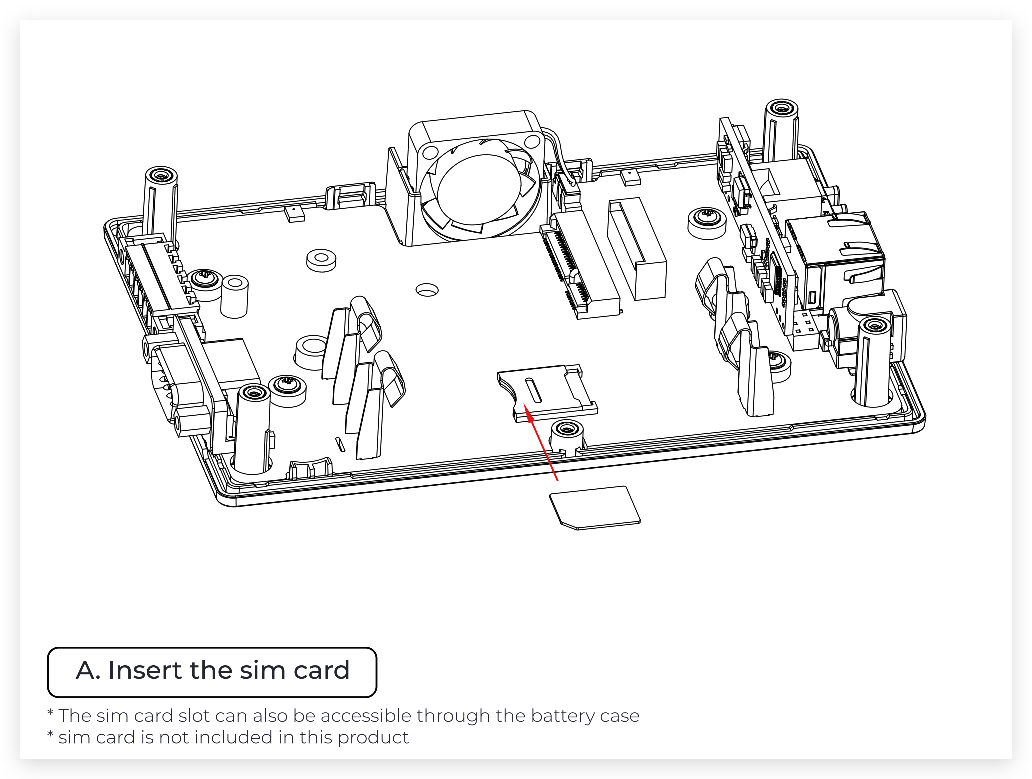
- SIM カード x1
ステップ 1. reTerminal E10-1 の背面カバーを開け、EC25-EUX と SIM カードを reTerminal E10-1 に取り付けます。
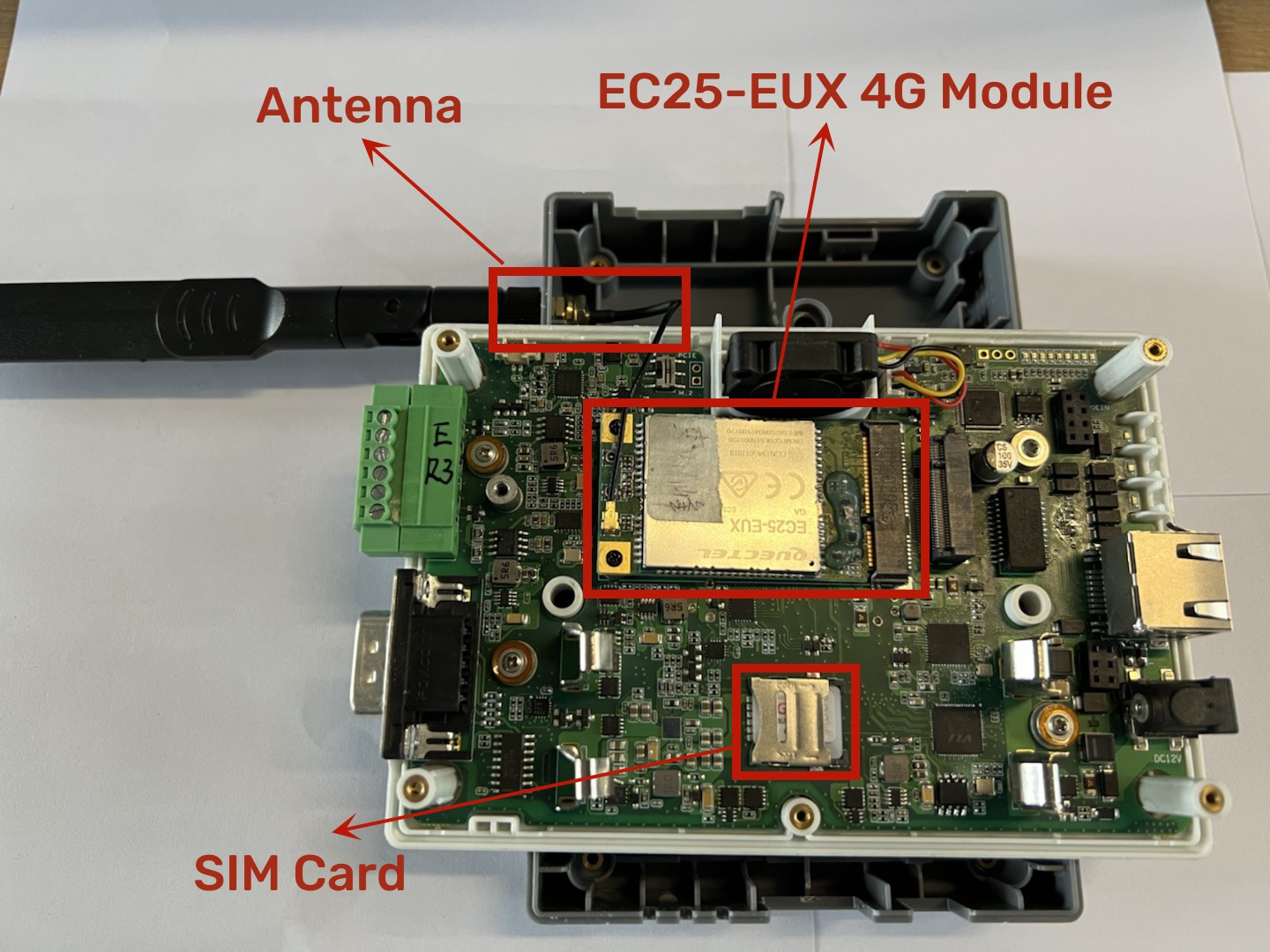
次にファンの横にあるスイッチを PCIE に切り替えます。
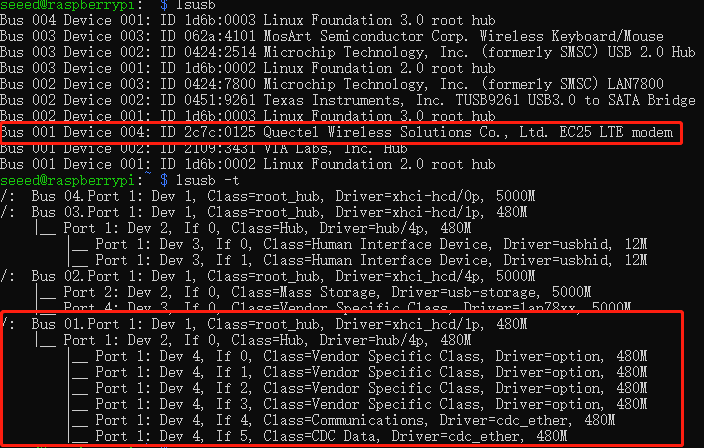
ステップ 2. lsusb を使用して EC25-EUX が検出されているか確認します
lsusb
lsusb -t
ステップ 3. シリアル通信ツール minicom をインストールします。
sudo apt install minicom
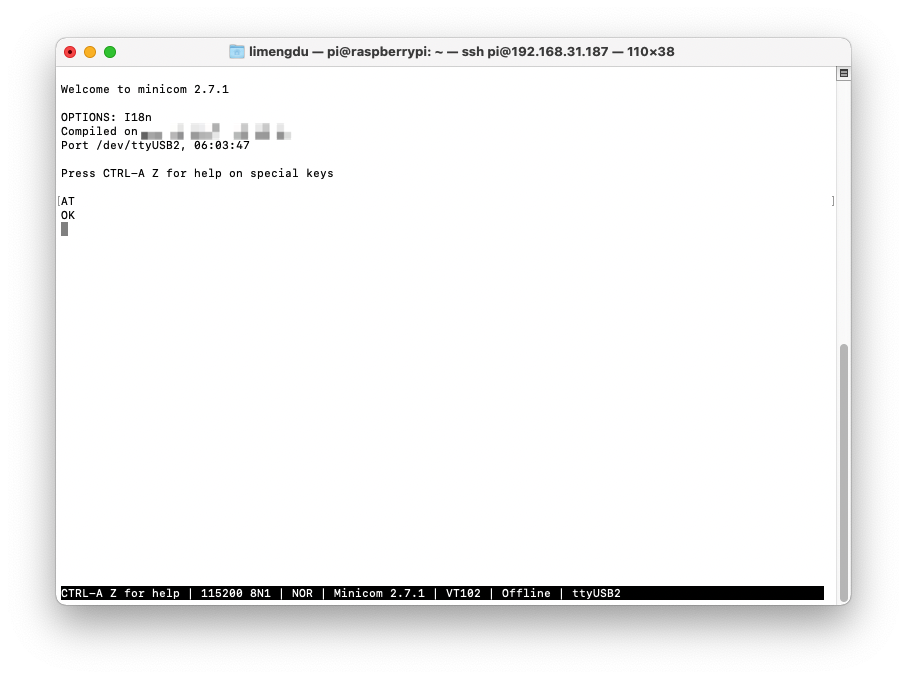
ステップ 4. minicom を介して EC25-EUX 4G モジュールに接続します。
sudo minicom -D /dev/ttyUSB2 -b 1152008n1
シリアル接続が開いたら、AT と入力して Enter キーを押します。OK と表示されるはずです。
ステップ 5. 4G モジュールを有効にして 4G ネットワークに接続する
4G 対応の SIM カードを Li-Po バッテリーホルダーの SIM カードスロットに挿入してください。この SIM カードスロットは micro SIM カードに対応しているため、nano SIM カードをお持ちの場合は、micro SIM カードに変換するアダプタを用意する必要があります。
同じ minicom のシリアルウィンドウで次を入力します:
AT+QCFG="usbnet"
+QCFG: "usbnet",0, のような結果が返ってきますが、これを 1(ECM モード)に設定する必要があるので、次のコマンドを入力します:
AT+QCFG="usbnet",1
次に、モデムの再起動を強制するために以下のコマンドを入力します:
AT+CFUN=1,1
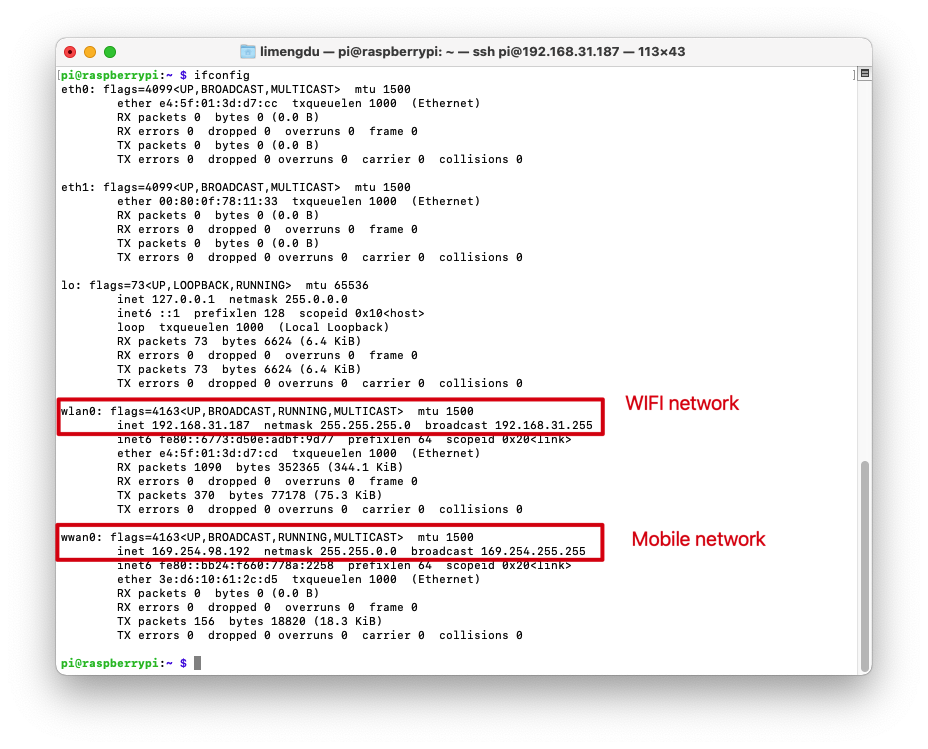
その後、reTerminal を再起動するか、モジュールが SIM カードのキャリアからインターネット接続を取得するまでしばらく待ちます。
また、ifconfig コマンドを使用して reTerminal のネットワーク状態を確認することもできます。
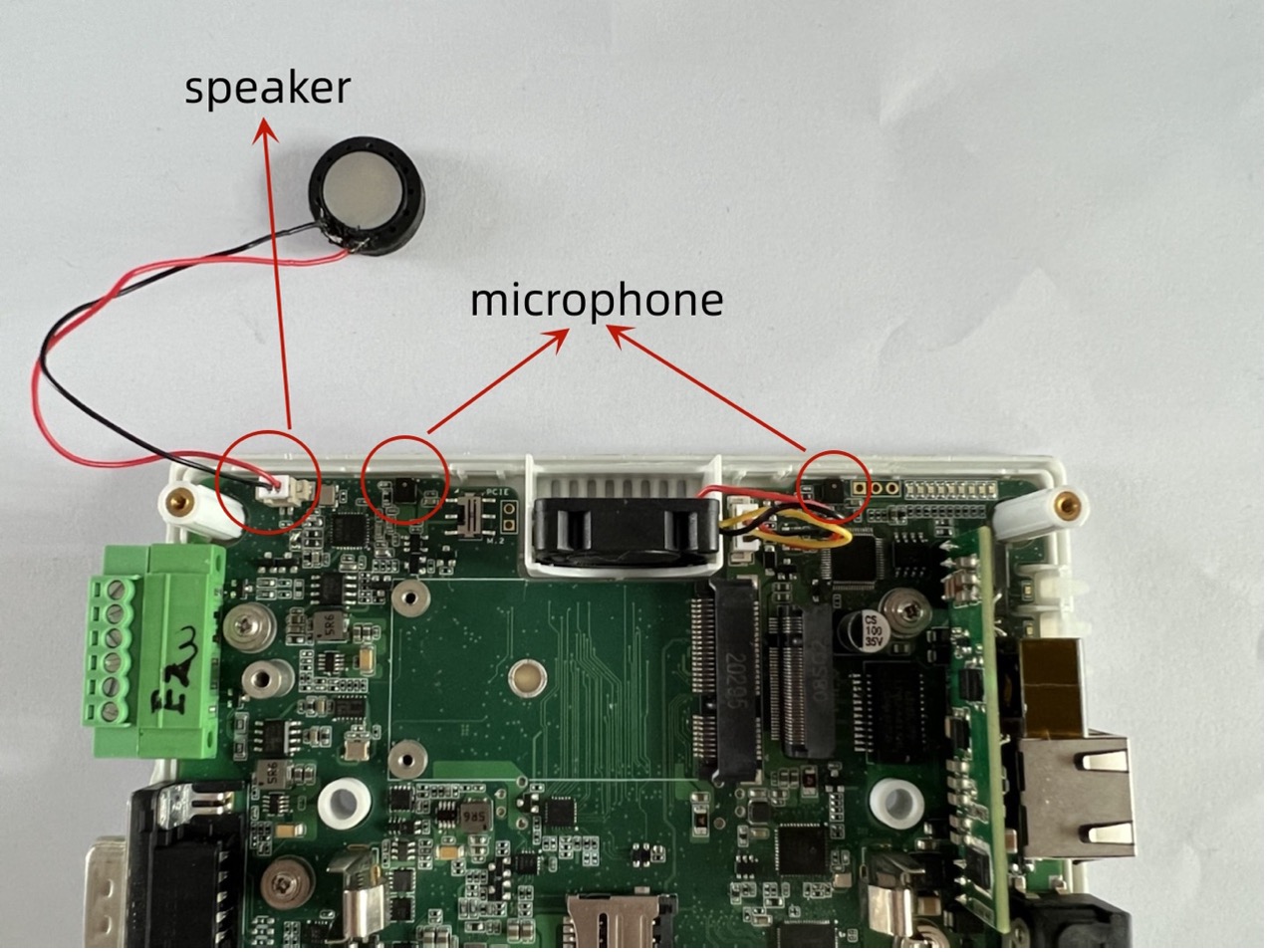
オーディオ
さまざまなユーザーのマルチメディアニーズを満たすために、reTermnal E10-1 の内部にはスピーカーモジュール 1 個とマイクモジュール 2 個が搭載されており、音声の再生と録音が行えるようになっています。
必要なもの
- reTerminal x1
- reTerminal E10-1 x1
Step 1. ドライバをダウンロードしてインストールします。
git clone https://github.com/Seeed-Projects/seeed-voicecard.git
cd seeed-voicecard
sudo ./install.sh
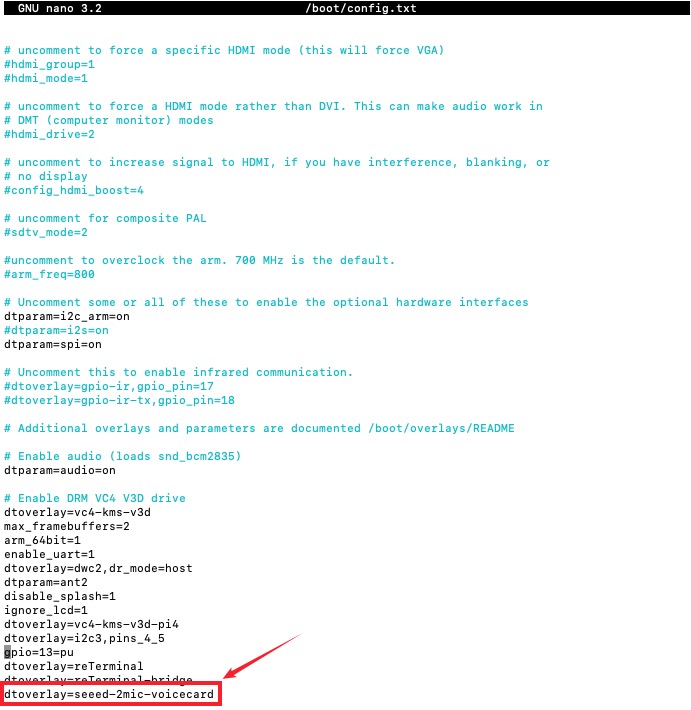
Step 2. 設定項目を追加します。dtoverlay=seeed-2mic-voicecard を /boot/config.txt に追加します。その後、デバイスを再起動します。
sudo sed -i '$s/$/\ndtoverlay=seeed-2mic-voicecard/' /boot/config.txt
/boot/config.txt を変更できているか確認するには、nano テキストエディタでファイルを開き、最後の行までスクロールして確認します:
nano /boot/config.txt
一度 /boot/config.txt に追加したら、次のコマンドで再起動できます:
sudo reboot
再起動が完了したら、arecord -l コマンドを使用して録音デバイスを確認します。
arecord -L

上図のように、card 0 device 0 が録音に使用する必要があるデバイスです。
Step 3. 上記の情報に従って、コマンドを使用して録音および保存の操作を行います。
arecord -Dhw:0,0 -d 10 -f cd -r 44100 -c 2 -t wav test.wav
パラメータの説明
- -D は録音デバイスを指定します。0,0 は card 0 device 0 を意味し、bcm2835-i2s-wm8960-hifi wm8960-hifi-0 です。
- -d は録音時間を秒単位で指定します。
- -f は録音フォーマットを指定します。cd、cdr、dat のみサポートします。
- -r はサンプリングレートを Hz 単位で指定します。
- -c はチャンネル数を指定します。
- -t は生成されるファイル形式を指定します。
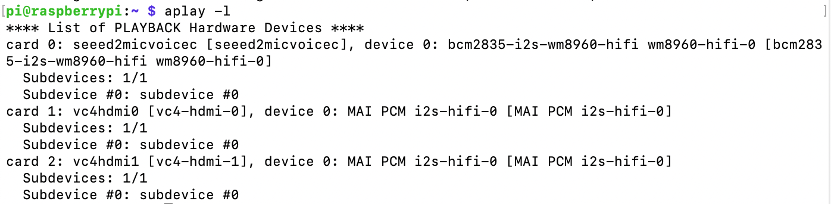
Step 4. 再生デバイスを確認します。
aplay -l
Step 5. 適切な音量に調整して音声を再生します。
sudo alsamixer
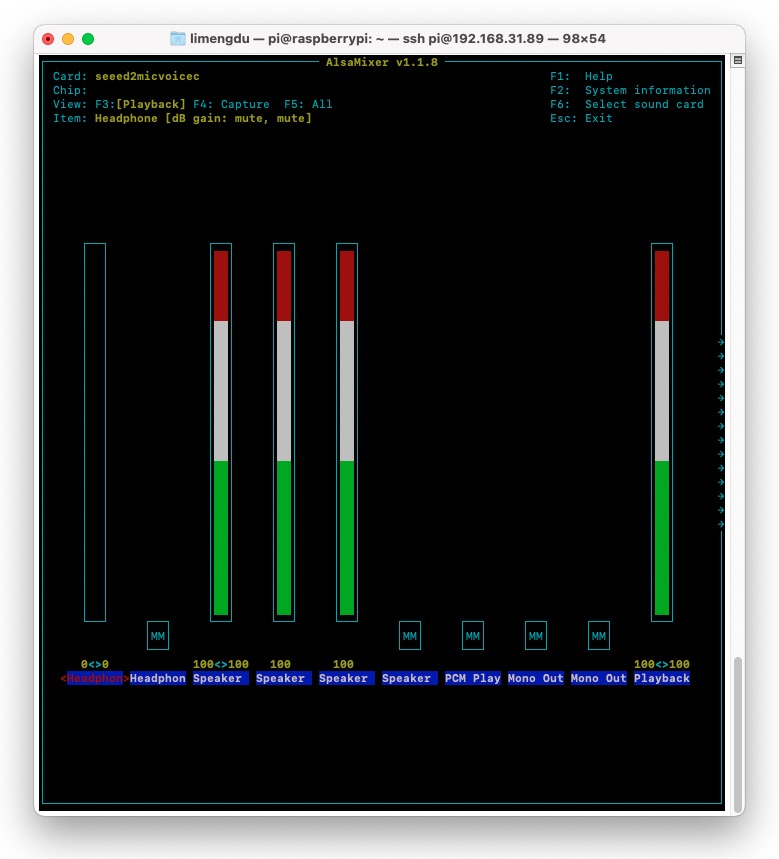
sudo aplay -Dhw:0 test.wav

FAQ
- どのタイプの 18650 バッテリーが互換性がありますか?
回答:Panasonic NCR18650B 3.6V 3400mAh を推奨します。
- バッテリーには過電流 / 低電圧 / 過電圧保護機能が必要ですか?
回答:不要です。reTerminal E10-1 にはバッテリー保護回路が搭載されています。
- 使用している CAN および RS485 コントローラの型番は何ですか?
回答:
- 485 コントローラ:TP485E
- CAN コントローラ:MCP2518FDT-E/QBB
- 昨日 E10 を取り付けましたが、バッテリー情報(充電レベル)は正しいですか? 充電器から外したばかりでも赤(0%)と表示されます。
Kernel: 5.10.103-v8+ aarch64 bits: 64 Console: tty 0 Distro: Debian GNU/Linux 10
電源表示機能:まだ開発されていませんが、ご要望は受け取りましたので、この機能の開発をスケジュールします。
- reTerminal 拡張ボードは別の(独立した)イーサネットポートを提供しますか?つまり、2 つのイーサネットポートを使用できますか?
これら 2 つのポートは互いに影響を与えることなく同時に使用できます。
- RS232 と RS485 は独立 / 分離されていますか(ハードウェアによってはどちらか一方しか使えない場合があります)?
RS232 と RS485 は同時には使用できず、どちらか一方のみ使用できます。
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。弊社は、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選択いただけるよう、複数のコミュニケーションチャネルを用意しています。