ReachyMini 入門ガイド
Reachy Mini は、人とロボットのインタラクションや創造的なカスタムアプリケーションを探求するために設計された、初のオープンソース・デスクトップロボットです。Pollen Robotics と Hugging Face によって共同開発されたこのコンパクトなヒューマノイドロボットは、プロフェッショナルレベルのロボティクス機能を、手頃な価格であなたのデスクにもたらします。
Seeed Studio によって最適化・製造された Reachy Mini は、表現力豊かな物理的インタラクションと最新の AI 機能を兼ね備えています。音声アシスタント、コンピュータビジョンアプリケーション、教育ツールなど、どのようなものを構築する場合でも、Reachy Mini は実世界の AI 実験のための完全なプラットフォームを提供します。
このページで学べること
- Reachy Mini の主な機能とアーキテクチャ
- Lite 版と Full 版のハードウェア仕様と違い
- Reachy Mini の組み立てと設定方法
- Python SDK を使ったロボットの制御方法
- Hugging Face のモデルやアプリケーションとの連携方法
- コミュニティリソースやサポートの見つけ方
主な機能と仕様
Reachy Mini は、コンパクトなデスクトップサイズの筐体に、驚くほど多くの機能を詰め込んでいます。
| 機能 | Reachy Mini Lite | Reachy Mini (Full) |
|---|---|---|
| 価格 | $299 + 送料 | $449 + 送料 |
| コンピュート | 外部(Mac/Linux 対応) | Raspberry Pi 4 搭載 |
| 接続性 | 有線のみ | WiFi + Ethernet(USB-C アダプタ経由) |
| 電源 | 有線電源 | バッテリー + 有線動作 |
| マイク | 4 | 4 |
| スピーカー | 5W | 5W |
| カメラ | 広角 | 広角 |
| 加速度センサー | なし | あり |
| 頭部の可動 | 6 自由度 | 6 自由度 |
| 胴体の回転 | あり | あり |
| アニメーションアンテナ | 2 | 2 |
| 高さ | 28 cm (11") | 28 cm (11") |
| 重量 | 1.5 kg (3.3 lbs) | 1.5 kg (3.3 lbs) |
物理的寸法
- 高さ: 28 cm / 11 インチ(スリープモード時は約 23 cm / 9 インチ)
- 幅: 16 cm / 6.3 インチ
- 重量: 1.5 kg / 3.3 lbs
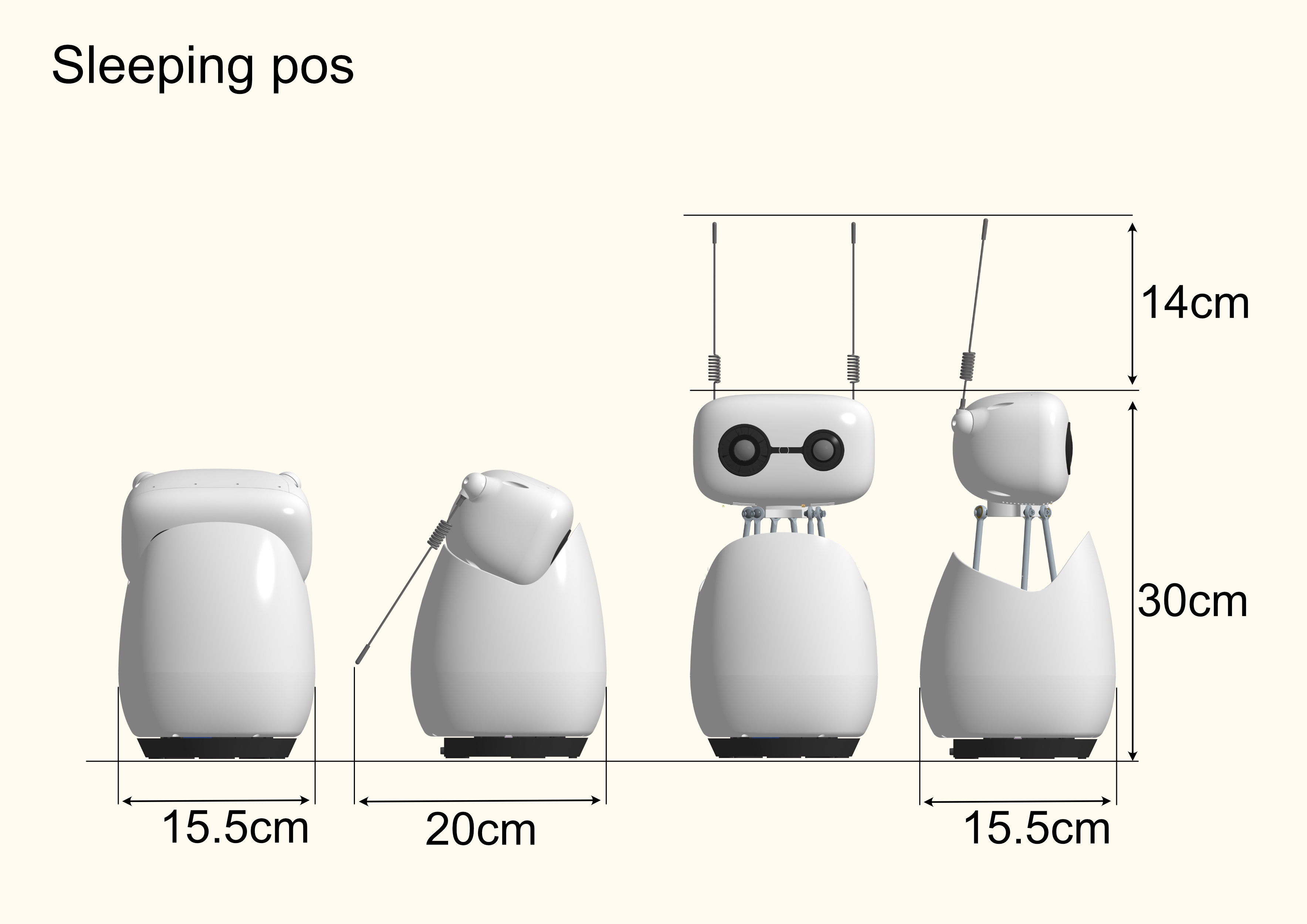
物理的寸法
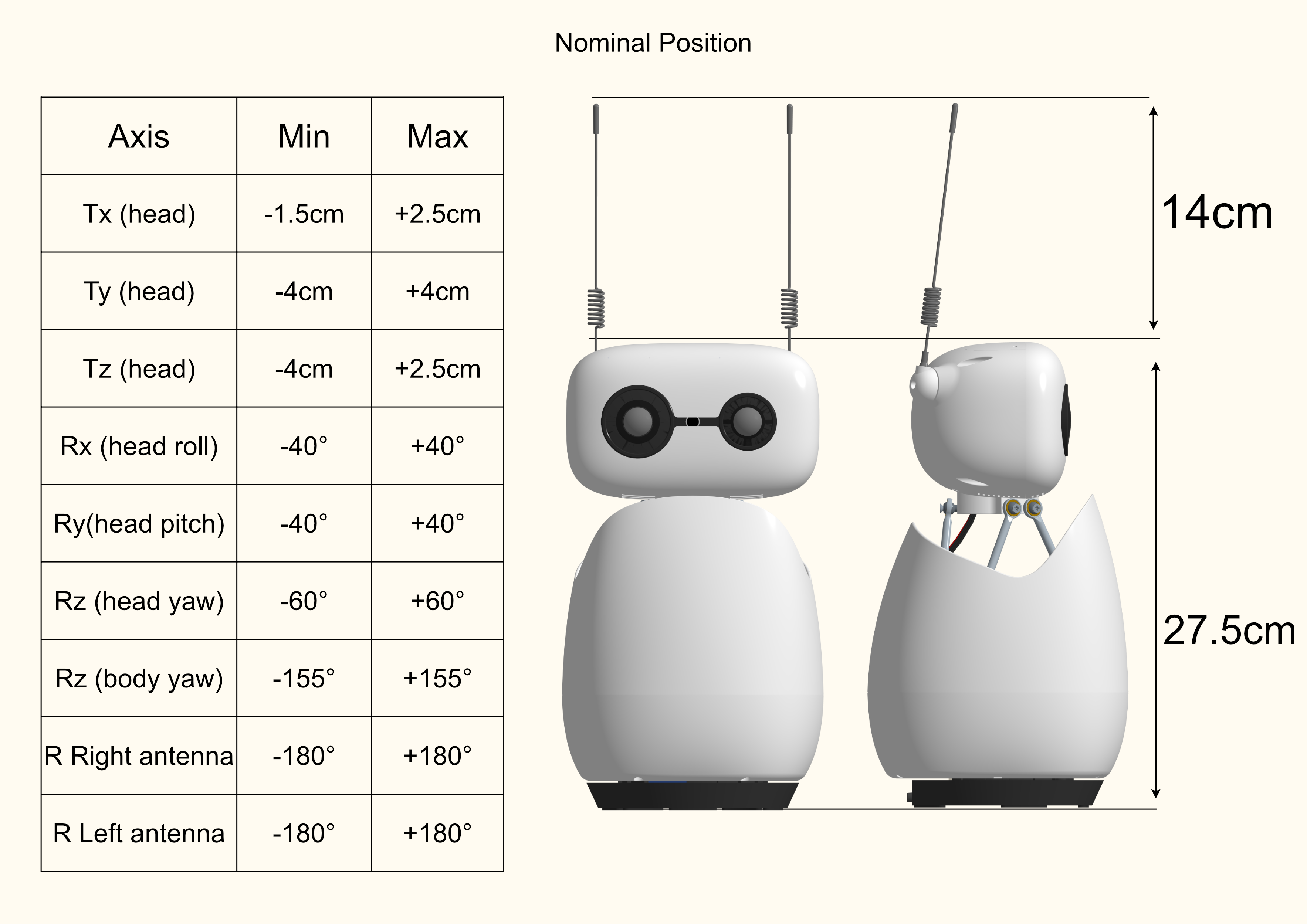
自由度仕様
動作範囲
人とロボットのインタラクションのための設計
Reachy Mini は、表現力が高く魅力的な人とロボットのインタラクションのために、特別に設計されています。
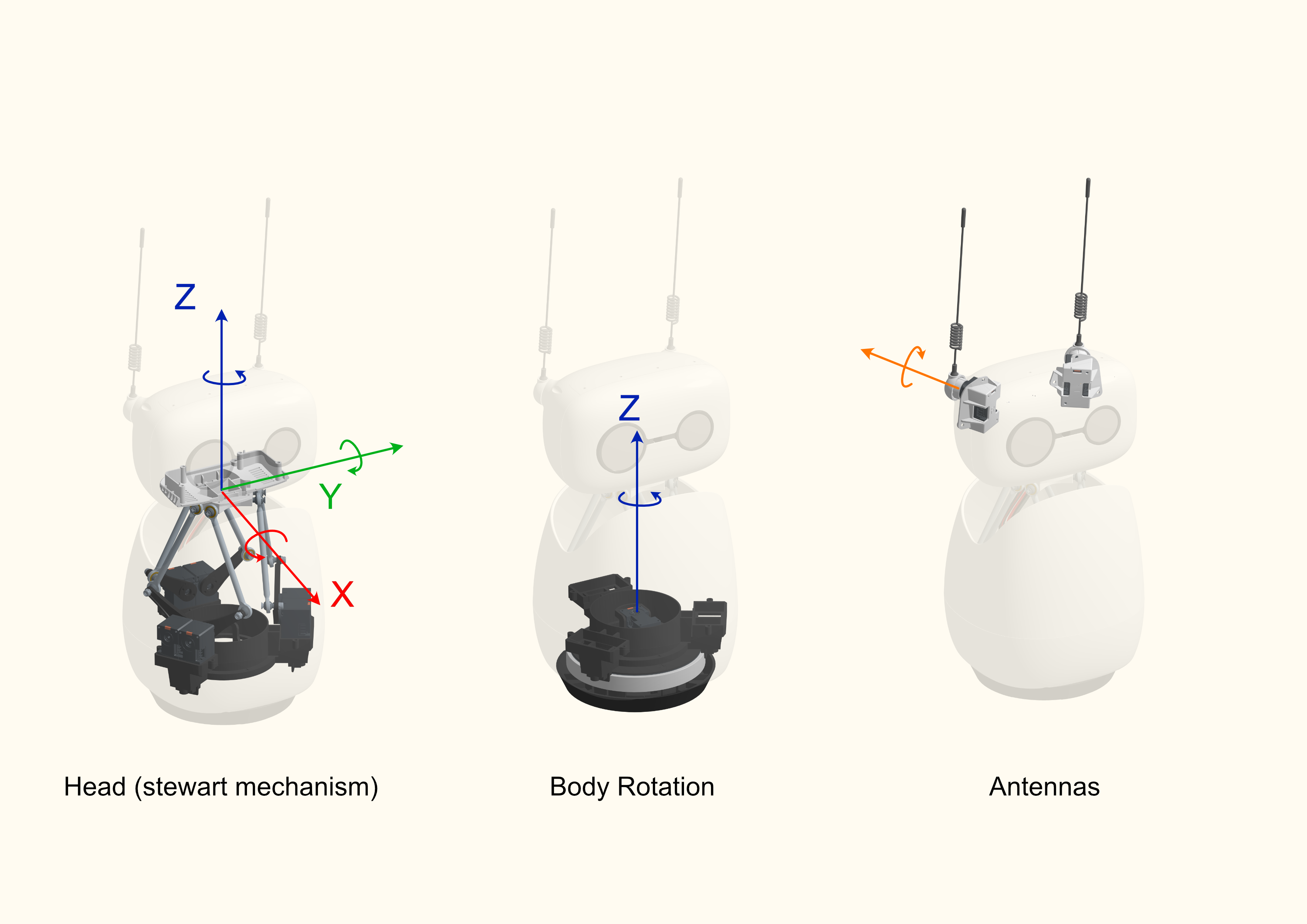
表現力豊かな動き
- 6 自由度の頭部: 自然なパン・チルト・ロール動作
- 胴体の全回転: ダイナミックなポジショニングのための 360 度回転
- アニメーションアンテナ: 個性とフィードバックを与える 2 本の表現力豊かなアンテナ
マルチモーダルセンシング
- 4 マイクアレイ: 音声認識や音源定位のための高度な音声取得
- 広角カメラ: 顔検出、物体認識などのコンピュータビジョン機能
- 5W スピーカー: 音声合成や効果音のためのクリアな音声出力
オープンかつ拡張可能
- 完全オープンソース: ハードウェア設計、ソフトウェア SDK、シミュレーション環境を公開
- Python SDK: 直感的なプログラミングインターフェース(JavaScript と Scratch 対応は近日追加予定)
- Hugging Face 連携: 音声・ビジョンなど最先端の AI モデルへ直接アクセス可能
ハードウェアバージョン
Reachy Mini Lite ($299)
Lite 版は、外部コンピュートを好む開発者や、すでに好みの開発環境を持っているユーザーに最適です。
最適な用途:
- Mac/Linux システムを使用している開発者
- コンピュートリソースを最大限自分で制御したいユーザー
- 既存のコンピュータラボを備えた教育現場
- 既存インフラとの統合が必要なプロジェクト
制限事項:
- ホストコンピュータとの有線接続が必要
- WiFi 機能なし
- 加速度センサーなし
- コンセントから給電する必要あり
Reachy Mini Full ($449)
Full 版にはオンボードコンピュートが搭載されており、完全な自律動作とワイヤレス動作が可能です。
最適な用途:
- スタンドアロンのロボットアプリケーション
- ワイヤレスでの研究開発
- 加速度センサーデータが必要なプロジェクト
- 持ち運び可能なデモや導入
追加機能:
- Raspberry Pi 4 オンボードコンピュータ
- WiFi 接続
- ワイヤレス動作用バッテリー
- 内蔵加速度センサー
組み立てガイド
Reachy Mini はキットとして販売されており、組み立てにはおよそ 2〜3 時間 かかります。組み立てプロセスは、あらゆるレベルのビルダーが取り組みやすいように設計されています。
組み立て用リソース
- インタラクティブ組み立てガイド: ステップバイステップのオンライン手順
- 2〜3 時間を確保し、清潔で明るい作業スペースを用意する
- 小型ドライバーセットが必要です(キットに同梱)
- 最良の結果のために、オンラインガイドをステップごとに順番に従う
- 組み立てながら各サブシステム(カメラ、マイク、サーボ)をテストする
ソフトウェアのはじめ方
前提条件
お使いのバージョンに応じて、次のものが必要です。
Reachy Mini Lite:
- Mac または Linux コンピュータ(Windows 対応は近日追加予定)
- Python 3.8 以上
- USB 接続
Reachy Mini Full:
- WiFi ネットワークまたは Ethernet 接続
- ダッシュボードにアクセスするための Web ブラウザ
クイックスタートインストール
次のコマンドで Reachy Mini SDK をインストールします。
pip install reachy-mini
プロ向けヒント: uv をインストールすると、アプリのインストールが 10〜100 倍高速になります(自動検出され、失敗した場合は
pipにフォールバックします)。
Hello World の例
わずか数行のコードでロボットを制御できます。
from reachy_mini import ReachyMini
from reachy_mini.utils import create_head_pose
with ReachyMini() as mini:
# Look up and tilt head
mini.goto_target(
head=create_head_pose(z=10, roll=15, degrees=True, mm=True),
duration=1.0
)
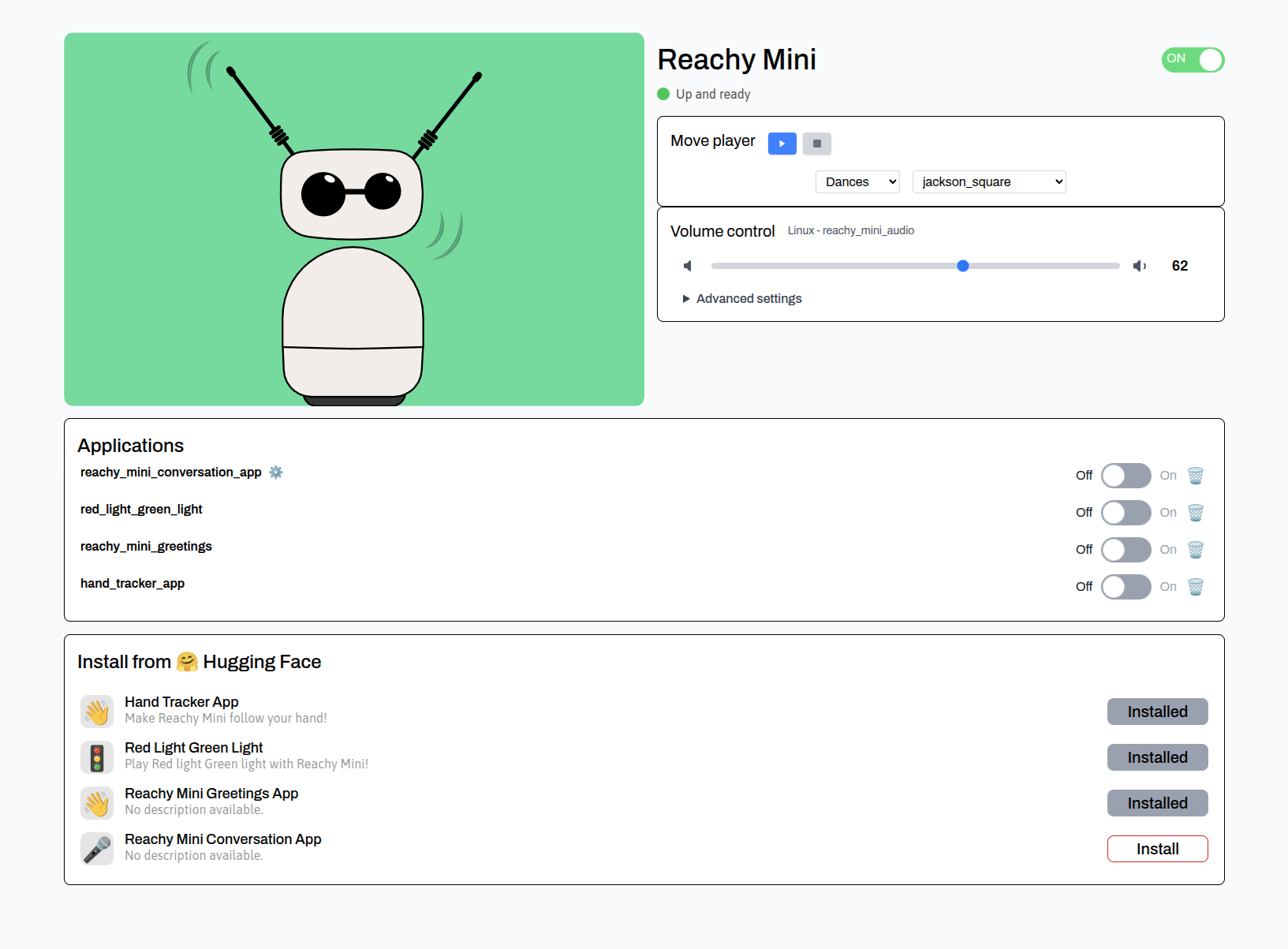
ダッシュボードによる制御
Web ベースのダッシュボードにより、コードを書くことなく Reachy Mini をテスト・制御できる直感的なインターフェースが提供されます。
機能:
- リアルタイムのモーター制御
- カメラ映像の表示
- マイクのテスト
- アプリ管理
- システム診断
ダッシュボードは公式リポジトリからダウンロードするか、Reachy Mini Full のローカルネットワークから直接アクセスできます。
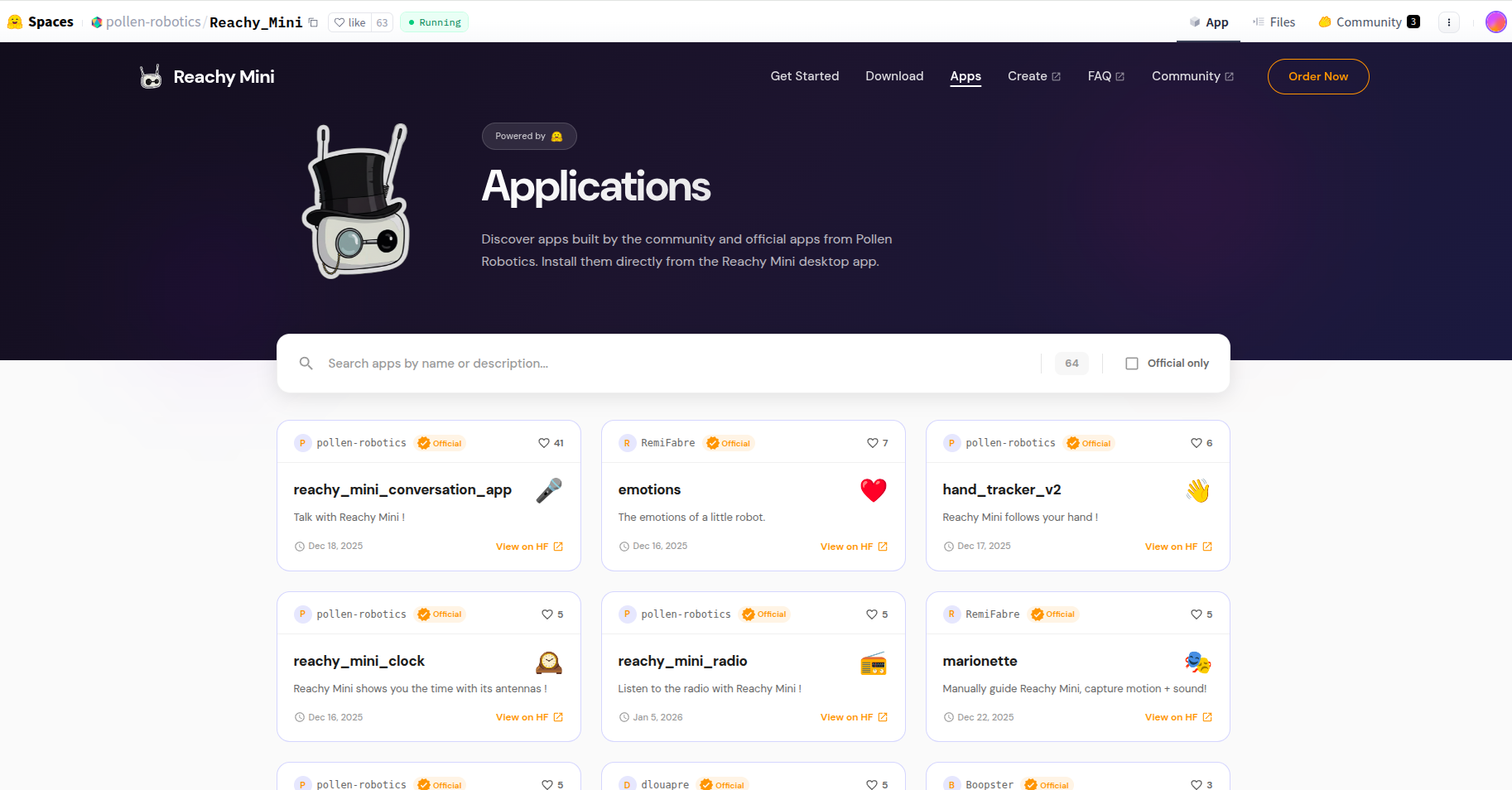
Hugging Face アプリエコシステム
Reachy Mini には、Hugging Face Spaces によって提供される、すぐに使えるアプリケーションのエコシステムが拡大し続けています。これらのアプリは、ロボットのダッシュボードからワンクリックで直接インストールできます。
注目のアプリ
Conversation アプリ
- 大規模言語モデルによる自然言語インタラクション
- 音声認識と音声合成
- カスタマイズ可能な人格とナレッジベース
Hand Tracker
- コンピュータビジョンを用いたリアルタイムの手のトラッキング
- ロボットがあなたの手の動きに追従
- デモやインタラクション実験に最適
Radio
- 音声操作によるラジオストリーミング
- 楽曲や局を自然言語でリクエスト
- オーディオ処理機能をデモンストレーション
その他多数: Hugging Face Spacesでアプリコレクション全体を参照してください
カスタムアプリケーションの構築
Python SDK
Python SDK は、Reachy Mini のすべてのシステムを包括的に制御するための機能を提供します:
from reachy_mini import ReachyMini
with ReachyMini() as mini:
# Motor control
mini.goto_target(head=pose, duration=1.0)
# Camera access
frame = mini.camera.get_frame()
# Audio I/O
mini.speaker.play_audio(audio_data)
audio = mini.microphones.record(duration=5.0)
# Accelerometer (Full version only)
orientation = mini.imu.get_orientation()
AI 連携
Reachy Mini は、Hugging Face の幅広いモデルエコシステムとシームレスに統合できます:
- 音声認識: Whisper、Wav2Vec2
- 音声合成: Bark、SpeechT5
- ビジョン: ViT、CLIP、YOLO
- 言語: LLaMA、Mistral、GPT モデル
- マルチモーダル: GPT-4V、LLaVA
アプリの公開
作成したアプリを世界中の Reachy Mini コミュニティと共有しましょう:
- SDK を使ってアプリを構築する
- Hugging Face Space を作成する
reachy-miniタグを追加する- 公開して、数百万の Hugging Face ユーザーと共有する
シミュレーション開発
MuJoCo シミュレーション環境を使用して、ハードウェアなしで Reachy Mini アプリケーションのプロトタイピングと開発が行えます:
pip install reachy-mini[simulation]
コードをテストし、素早く反復し、準備ができたらハードウェアにデプロイします。
技術仕様の詳細
モーターシステム
- 自由度: 6-DOF の頭部動作
- 制御: 高精度サーボモーター
- 安全性: 電流制限と位置フィードバック
- スムーズな動き: 自然な動きを実現する補間軌道
オーディオシステム
- マイクアレイ: 最適な音源定位のために配置された 4 つのマイク
- ビームフォーミング: ハードウェアレベルのオーディオ処理
- SNR: 明瞭な音声取得のための高い信号対雑音比
- スピーカー: 明瞭な周波数特性を持つ 5W 出力
ビジョンシステム
- センサー: 広角カメラ
- 解像度: HD ビデオキャプチャ
- FPS: 1 秒あたり 30 フレーム
- 視野角: デスクトップでのインタラクションに最適化
電源要件
Lite バージョン:
- ホストコンピュータまたは AC アダプタから USB 経由で給電
- 典型的な消費電力:5V @ 2A
Full バージョン:
- ワイヤレス動作用の内蔵バッテリー
- USB-C 充電
- バッテリー駆動時間:使用状況に応じて 2〜4 時間
プライバシーとセキュリティ
Reachy Mini はプライバシーを重視して設計されています:
- データ収集なし: ロボットはデフォルトでは個人データを保存・送信・処理しません
- ローカル処理: すべての AI 処理はローカルで実行可能
- ユーザーコントロール: カメラとマイクの機能は完全にユーザーの管理下にあります
- オープンソース: ソフトウェアとハードウェアの完全な透明性
Reachy Mini は、Pollen Robotics や Hugging Face にいかなるデータも送信しません。明示的にクラウドサービスを設定しない限り、すべての処理はローカルで行われます。
コミュニティとサポート
コミュニティに参加する
- Discord: Reachy Mini Discord に参加
- GitHub: 問題の報告とコントリビュート
- 公式サイト: https://www.pollen-robotics.com/reachy-mini/
ドキュメントと学習リソース
- 公式開発ガイド: 公式ドキュメントと開発リソース一式
- SDK インストール: 5 分でコンピュータをセットアップ
- クイックスタートガイド: Reachy Mini で最初の挙動を実行
- Python SDK: 動く・見る・話す・聞くを学ぶ
- AI 連携: LLM を接続し、アプリを構築して Hugging Face に公開
- コアコンセプト: アーキテクチャ、座標系、安全限界
- セカンダリ開発: カスタムアプリケーション開発のための Seeed スターターガイド
- 組み立てガイド: ステップバイステップの組み立て手順
- 🤗アプリをコミュニティと共有しましょう
次のステップは?
ロードマップ
Reachy Mini プラットフォームは継続的に進化しています:
- JavaScript 対応: Web ベース開発向けに近日対応予定
- Scratch 連携: 初心者向けのブロックベースプログラミング
- 追加アプリ: コミュニティアプリケーションのエコシステム拡大
- ハードウェア拡張: モジュラーアクセサリとアップグレード
- 強化された AI モデル: オンボード処理向けに最適化されたモデル
技術サポートと製品ディスカッション
当社の製品をお選びいただきありがとうございます。お客様が製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートをご用意しています。お好みやニーズに合わせて選べる複数のコミュニケーションチャネルを提供しています。