reBot Arm B601 × NVIDIA Jetson 入門ガイド
はじめに
新時代の Physical AI のためのオールインワン Embodied AI 開発プラットフォームです。 生成 AI が単に「世界を理解する」段階から、積極的に「世界とインタラクションする」段階へと進化するにつれ、ロボティクス開発は新たな時代 ― Physical AI ― に突入しています。 開発者、研究者、教育者が Embodied AI の世界へ踏み出すスピードを加速させるため、Seeed Studio は完全オープンソースの reBot Arm B601 と最先端の NVIDIA Jetson Developer Kit を組み合わせ、強力な次世代ロボティクス開発バンドルを提供します。
このバンドルは、高精度なロボットマニピュレーション機能だけでなく、マルチモーダル AI モデルや Vision-Language Model(VLM)、リアルタイムロボット推論をエッジでローカル実行するために必要な大規模 AI 演算能力も提供します。 学習・研究から迅速なプロトタイピング、実運用まで、次世代のインテリジェントロボットを構築するための完全なプラットフォームです。
| reBot Arm B601 DM | reBot Arm B601 RS |
|---|---|
 |  |
| NVIDIA® Jetson AGX Thor™ Developer Kit | reComputer Classic J3011 |
 |  |
ここでは、NVIDIA Jetson Thor を例として使用し、Jetson で reBot Arm B601 ロボットアームを素早く制御する方法を説明します。用途に応じて、他の Jetson デバイスを選択することもできます。
なぜこのバンドルなのか?
完全な Embodied AI 開発プラットフォーム
従来のロボティクス開発には、しばしば次のような制約があります。
- クローズドなハードウェアエコシステム
- 不十分な AI 演算能力
- 断片化されたソフトウェアスタック
- 高い開発ハードル
- 実世界の Physical AI シナリオの検証が困難
reBot Arm × Jetson バンドルは、これらの課題を解決するために設計されています。
このバンドルにより、次のものが得られます。
- 完全オープンソースの 6+1 自由度ロボットアームプラットフォーム
- GPU 搭載の NVIDIA フラッグシップエッジ AI コンピューティングプラットフォーム
- ROS1、ROS2、Isaac Sim、LeRobot のネイティブサポート
- マルチモーダル AI と生成 AI ワークフローへの対応
- 教育・研究・AI ロボティクス試作のための統合環境
セットアップ
ハードウェア接続
- ロボットアームの組み立てについては、このガイドを参照してください。
- USB-to-CAN アダプタを使用して、Type-C インターフェース経由でロボットアームを NVIDIA Jetson に接続します。
ワンクリックでアームドライバをインストール
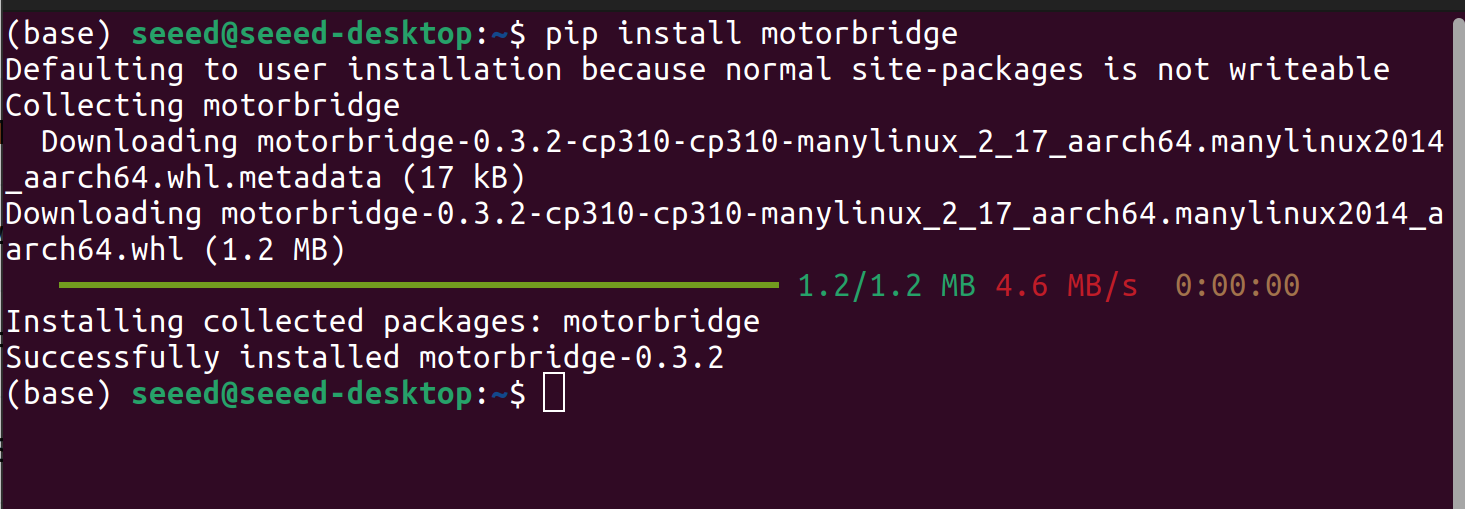
Jetson 上でターミナルウィンドウを開き、次のコマンドを実行します。
uv pip install motorbridge
WebUI
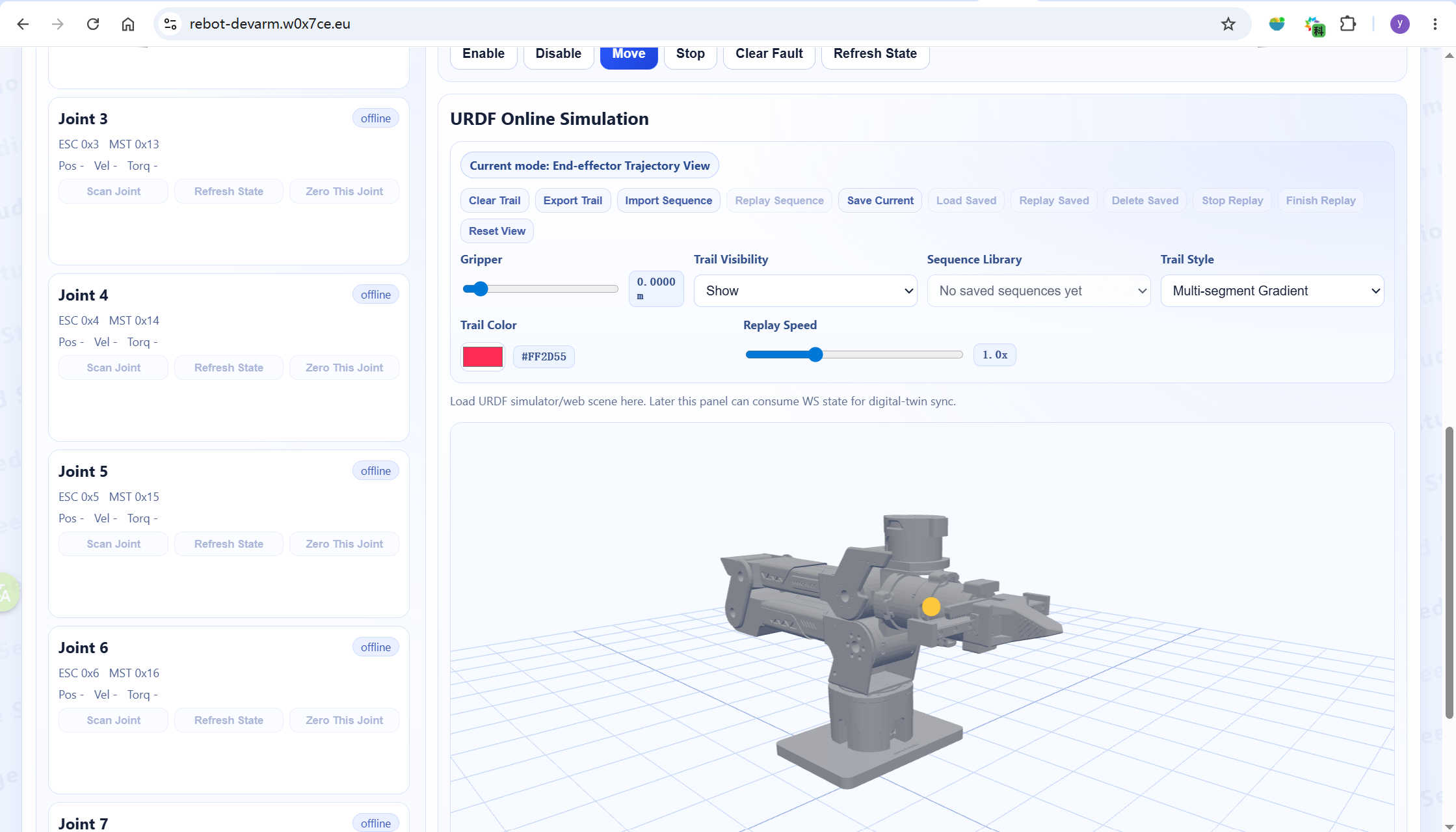
Nvidia Jetson 上で次のコマンドを実行します。
motorbridge-gateway --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port /dev/ttyACM0 --serial-baud 921600 --dt-ms 20
その後、ブラウザで https://motorbridge.github.io/motorbridge-studio/ を開くと、次のページが表示されます。このインターフェースから、モーターパラメータの調整、ロボットアームの状態確認、その他の操作を行うことができます。
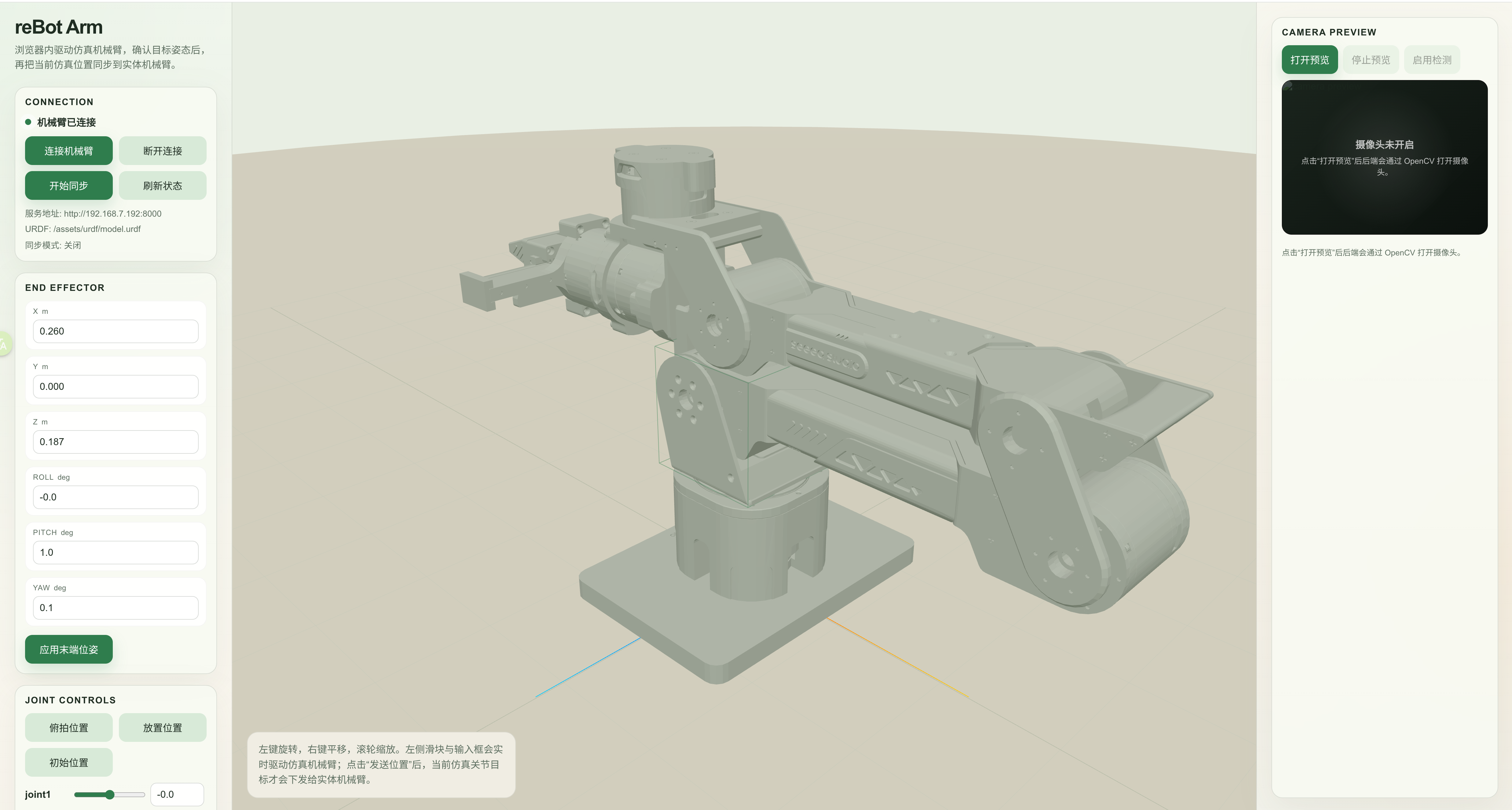
アプリケーション

技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます。弊社は、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お客様の好みやニーズに応じて選べる、複数のコミュニケーションチャネルをご用意しています。