reBot Arm B601-DM 入門ガイド

![]()
![]()
![]()
![]()
6 自由度ロボットアーム · マルチモーター対応 · 運動学ソルバ · 軌道計画 · 完全オープンソース
このガイドの内容は光の速さであなたのもとへ向かっています — 続報をお待ちください!
reBot Arm プロジェクトは GitHub 上でオープンソース公開されています。本ガイドでは、B601-DM の組み立てから操作までのクイックスタート手順を説明します。
完成品キットを購入した場合は、本記事の最後にある ステップ 3 のチュートリアル動画に直接進み、動画に沿って操作してください。モーター ID の書き込みやゼロ位置のキャリブレーションを行う必要はありません。
仮想マシンではデモを実行するための性能が不足しており、設定上の問題も確認されています。ロボットアームの制御には Ubuntu の物理マシンを使用することを推奨します。
購入オプション
reBot Arm B601-DM には、さまざまなユーザーのニーズに対応する複数の構成が用意されています。
オプション比較
| 構成 | 本体 | グリッパ | モーター | 構造部品 | 購入リンク |
|---|---|---|---|---|---|
| コンプリートキット | ✅ | ✅ | ✅ | ✅ | Coming Soon |
| グリッパのみ | ❌ | ✅ | ❌ | ❌ | Coming Soon |
| 本体のみ(構造部品) | ✅ | ❌ | ❌ | ✅ | Coming Soon |
| 本体のみ(モーター) | ✅ | ❌ | ✅ | ❌ | Coming Soon |
電源について
- ロボットアームには電源は同梱されておらず、標準では電源は含まれていません。ご自身でバッテリーを接続するか、当社のオープンソース 24V 14.6A MeanWell 電源 または Amazon から購入してください。無名メーカーや安全でないルートからの電源は購入しないでください。その結果生じるいかなるリスクや損害も、すべて自己責任となります。
家庭用電源電圧が 220V の場合は、電源側面の電圧切替スイッチを 230V に設定してください。家庭用電源電圧が 110V の場合は、115V に切り替えてください。
| 220V | 110V |
|---|---|
 |  |

-
あるいは、当社のオープンソース 24V 14.6A MeanWell 電源エンクロージャを選択し、自分で組み立てることもできます。テキストによる説明書と BOM は GitHub リポジトリ で公開されています(関連する電源組み立て経験を持つ開発者にのみ推奨)。
組み立て参考動画:
ステップ 1: 組み立てガイド
組み立て前:
-
スムーズに組み立てを行うため、以下の注意事項をよくお読みください。
- 本キットには、外観がよく似たさまざまなネジや部品が含まれています。締め付ける前に、仕様と向きを必ず確認してください。
- 動画は 4 月上旬に撮影されたものです。細かな更新がある場合がありますが、組み立て手順は同じです。最終的には、同梱されている部品を正としてください。
- 同梱のネジにはねじロック剤が塗布されています。適切な工具、または電動ドライバー(推奨)を使用してください。トルクは (3–6 kgf·cm) に設定し、なめないようにしてください。もしネジがなめてしまった場合は、すぐに作業を中止し、ネジを交換するか位置を調整してください。ねじロック剤付きでなめたネジは外しにくく、部品を破損するおそれがあります。
- 組み立て作業中は安全に十分注意してください。指を挟んだりケガをしないようにしてください。子どもが作業する場合は必ず保護者が付き添ってください。
ヒント注意:組み立て動画内でモーター 5 とモーター 6 の間にある D4 * 7 を取り付けるように見えますが、実際には取り付ける必要はありません。これは動画内の誤りです。reBot Arm B601-DM の DIY 版を購入した場合、付属の 7 本の D4 * 7 ネジで組み立ては十分に行えます。
ステップ 2: モーター ID のリセット
AI AGENT
このセクションはベータ版です。使用時は安全に十分注意してください。AI の提案内容が本ドキュメントと異なる場合は、本ガイドに従い、必要に応じて当社エンジニアにお問い合わせください。
AI AGENT にこのプロセスをサポートさせましょう。以下のプロンプトをコピーして、お使いの AI アシスタントに入力してください:
Please follow the workflow in AGENTS.md (https://github.com/Welt-liu/reBot-B601-RS-Skills/blob/main/en/AGENTS.md) to help me initialize the robotic arm.
モーター ID リセット前の準備:
モーターのパラメータ設定を行う前に、次の準備事項と安全ルールを確認してください:
- 工作用クランプを 2 個(3 インチ以上)と、24V 15A XT30 出力のスイッチング電源を 1 台用意してください(一般的なブランド品を使用し、粗悪品は使用しないでください)。
- デバッグ/動作中は 1m 以上の距離を保ってください。
- モーターのホットプラグは禁止です。XT30 2+2 コネクタの抜き差しは、必ず電源を切ってから行ってください。
- 過負荷/過速度での動作は行わないでください。起動前に配線やネジの緩みを確認し、湿気の多い場所、高温、多粉じん環境は避けてください。
- 暴走を防ぐため、プログラムのパラメータと非常停止を適切に設定してください。
- これらのルールは必ず厳守してください。違反操作や個人的なミスに起因するリスクや責任について、販売者は一切の責任を負いません。
準備リスト
ハードウェア
- reBot Arm B601 DM ロボットアーム × 1
- USB-CAN アダプタボード × 1
- 信号・電源分離ボード × 1
- 木工用クランプ × 2
- USB-C ケーブル × 1
- 24V 15A 電源(XT30 出力)× 1
- 電源コード-US \ 電源コード-EU
コンピュータ要件
- デュアルブート構成のパーソナルコンピュータ(Windows + Ubuntu / macOS)
ソフトウェア
モーター ID の書き込みと有効化テスト
各関節モーターの CAN ID と Master ID を、以下の表のパラメータに従って設定します:
| モーター番号 | CAN ID | Master ID |
|---|---|---|
| Motor 1 | 0x01 | 0x11 |
| Motor 2 | 0x02 | 0x12 |
| Motor 3 | 0x03 | 0x13 |
| Motor 4 | 0x04 | 0x14 |
| Motor 5 | 0x05 | 0x15 |
| Motor 6 | 0x06 | 0x16 |
| Motor 7 | 0x07 | 0x17 |
以下は Motor 1 を例にした操作手順です。各関節モーターの CAN ID と Master ID が、必ず上記の表どおりに設定されていることを確認してください。
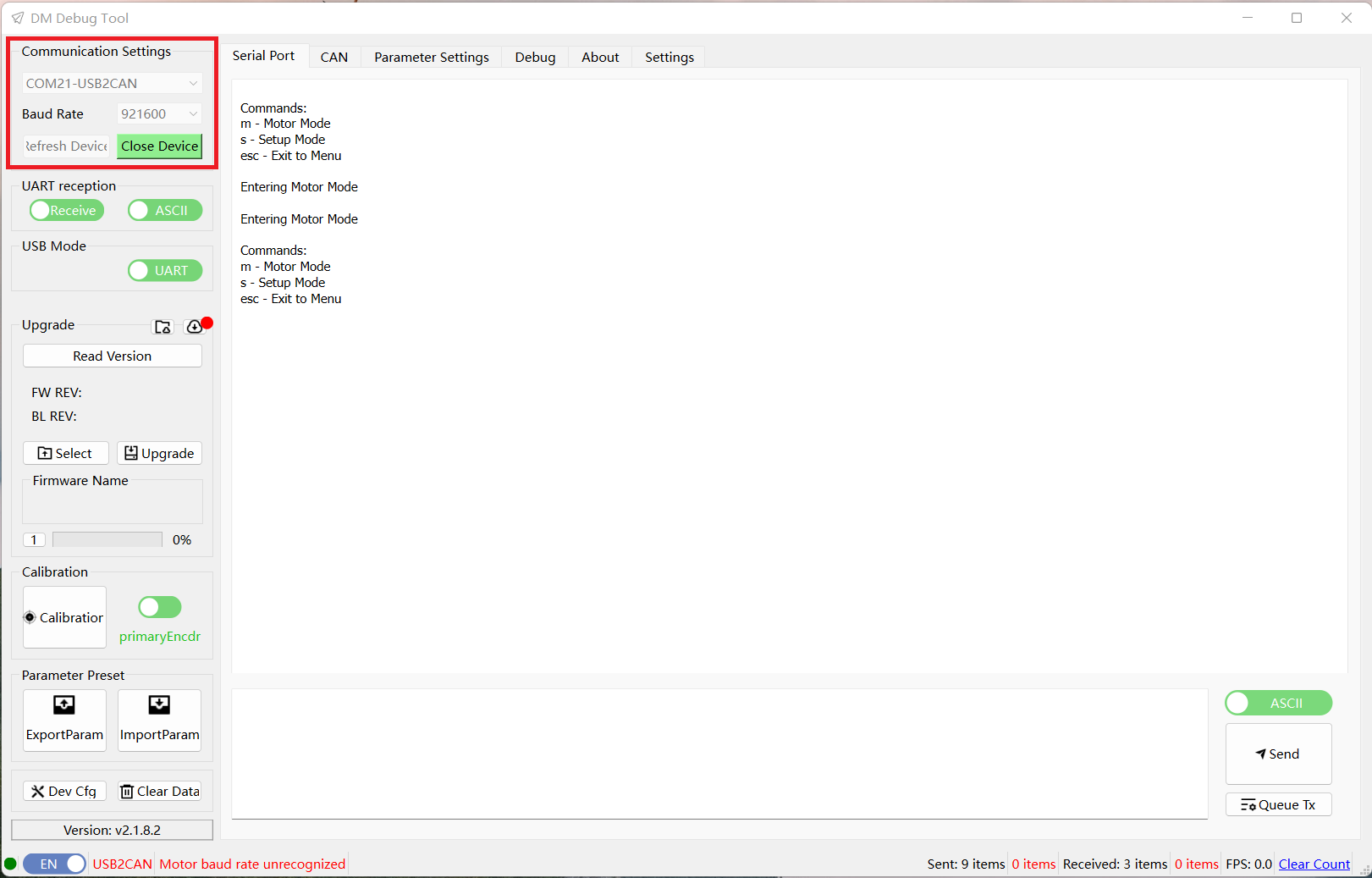
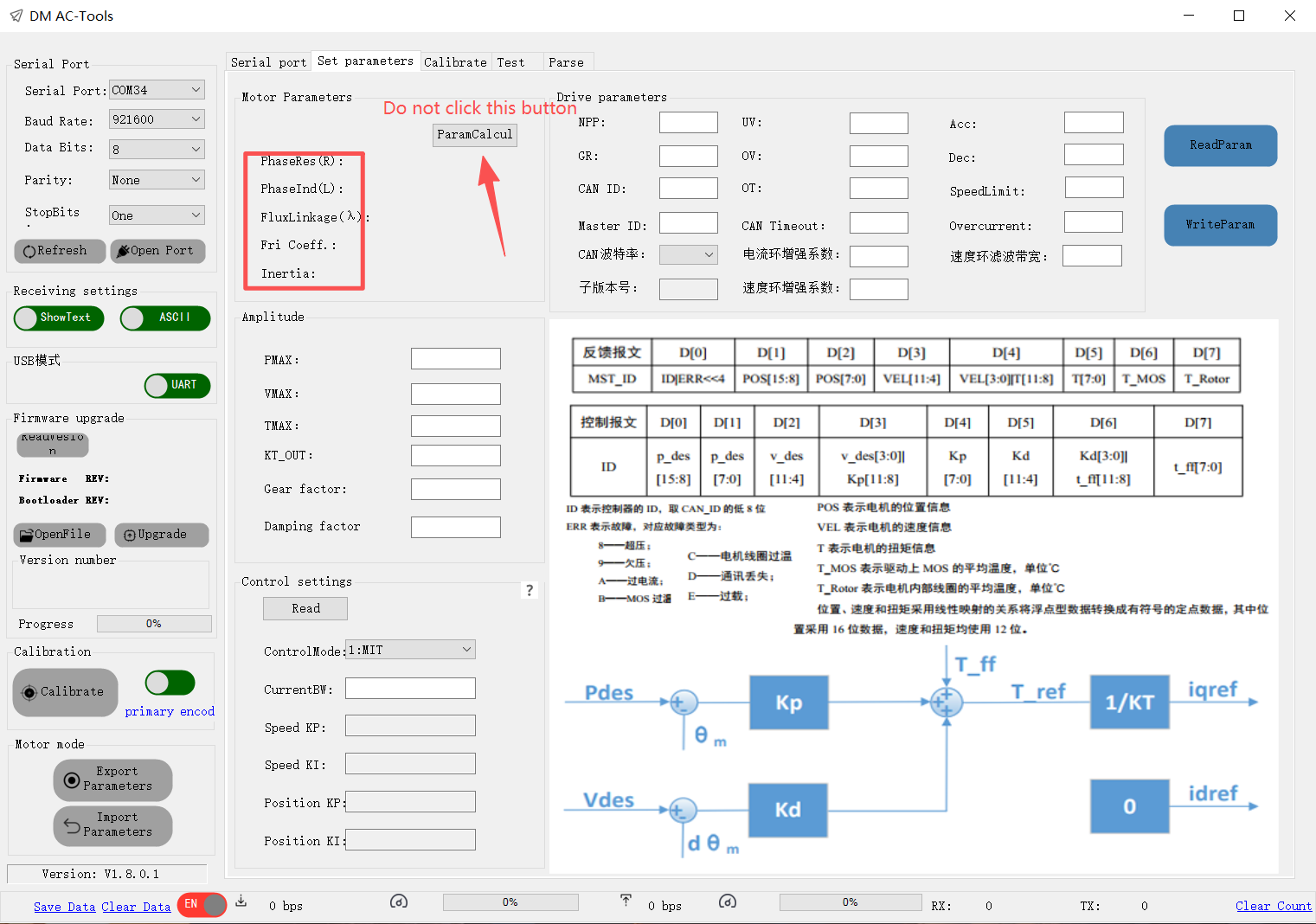
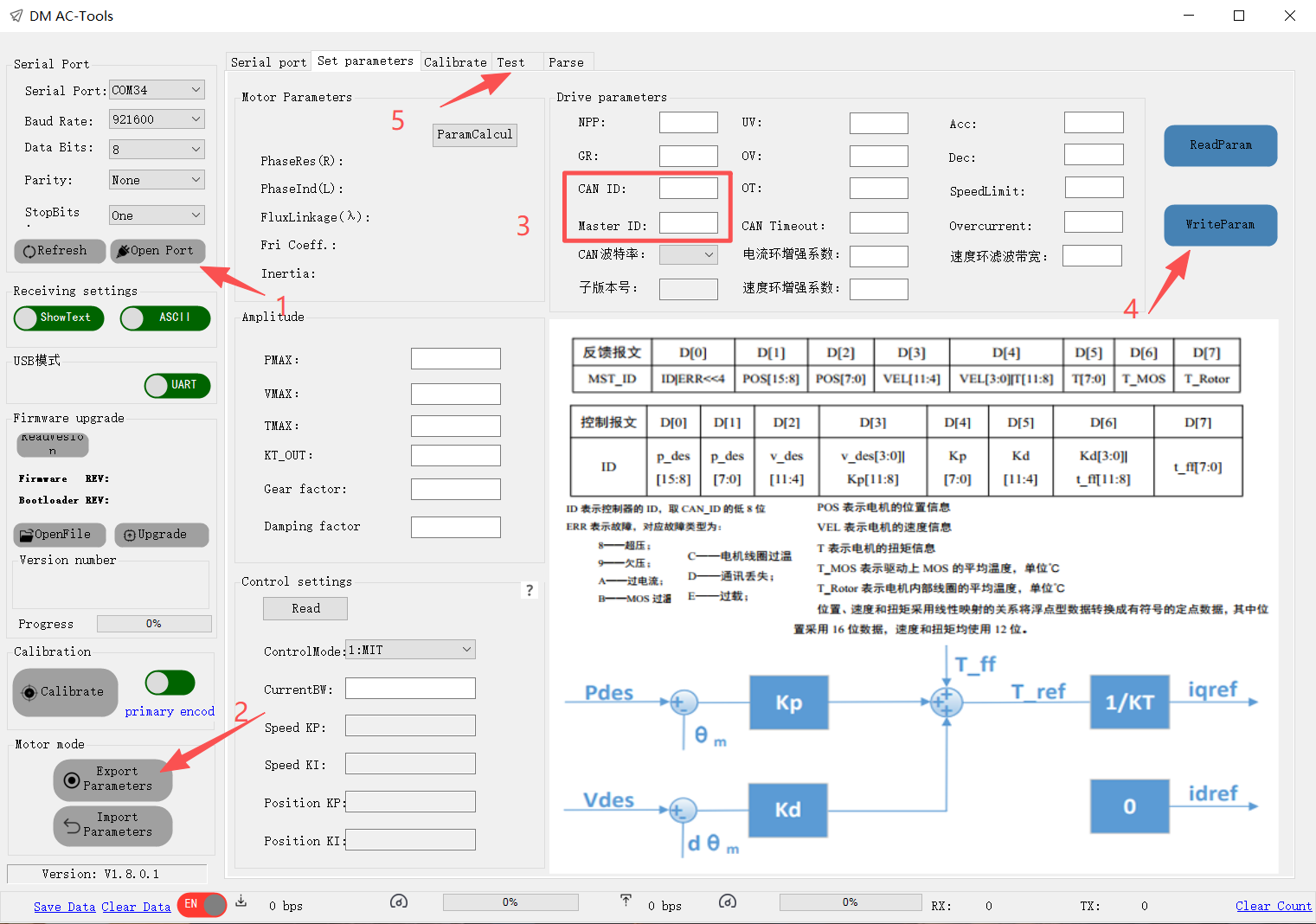
- DM_Tools ホストソフトウェアを起動し、対応する USB COM ポートを選択して、ボーレートを
921600に設定します。接続に成功すると、Serialインターフェースに情報が表示されます。
-
3 ピンケーブルを使用して、Motor 1 を USB-CAN アダプタボードに接続します。
-
接続後、
Parameter Settingsインターフェースに入り、Read Parametersをクリックして現在のパラメータを読み出し、その後CAN IDを0x01、Master IDを0x11に設定します。 -
設定が完了したら、
Write Parametersをクリックしてパラメータを保存します。
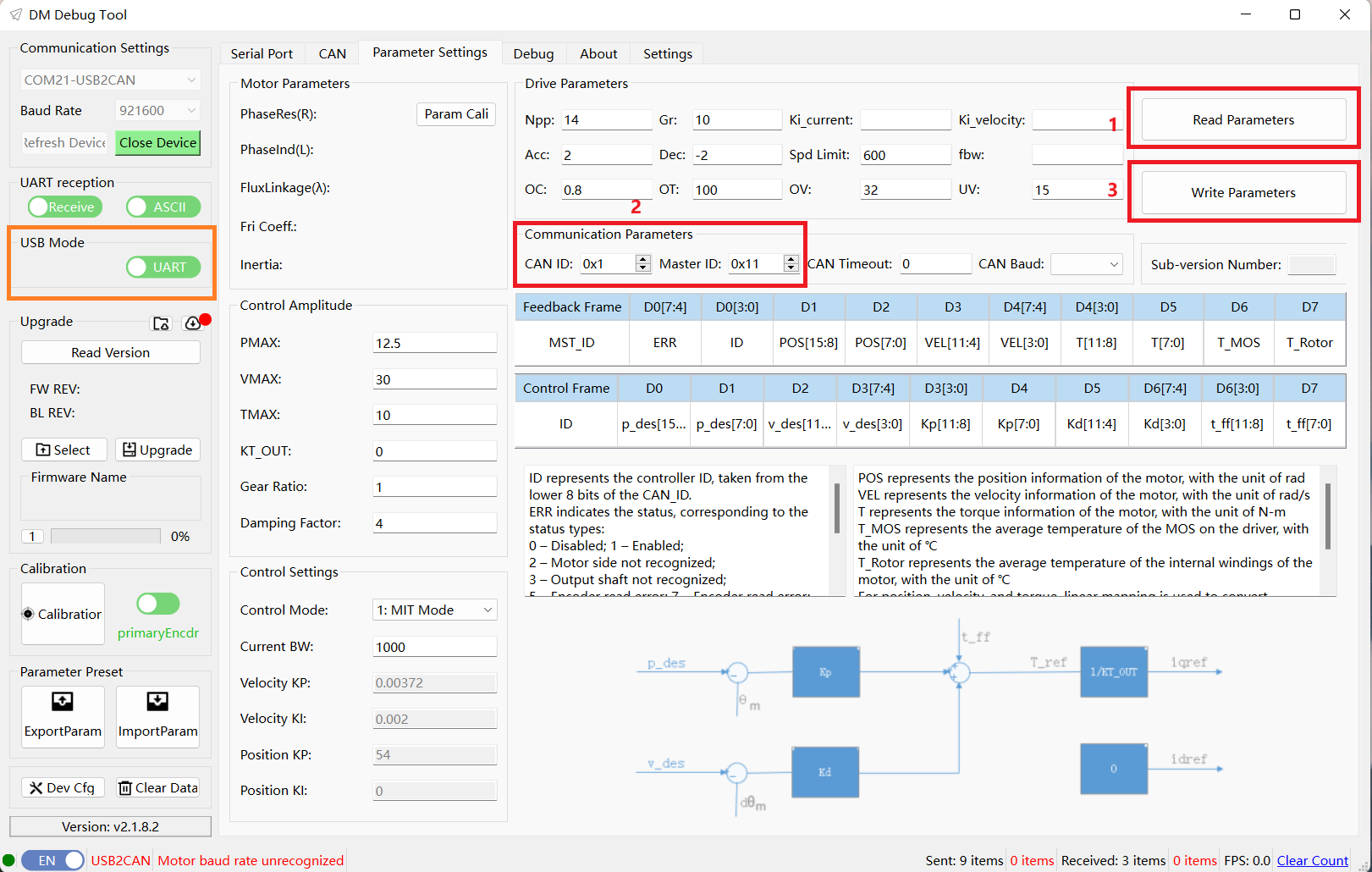
The USB mode in the orange box on the left represents the method used when reading and writing motor parameters on the current settings page.
5.Debugインターフェースに移動します。CAN ID と Master ID が正しく設定されていることを確認したら、Enable をクリックします。モーターのインジケーターランプが緑色の点灯に変わり、モーターが有効になったことを示します。これでモーター1のテストは完了です。
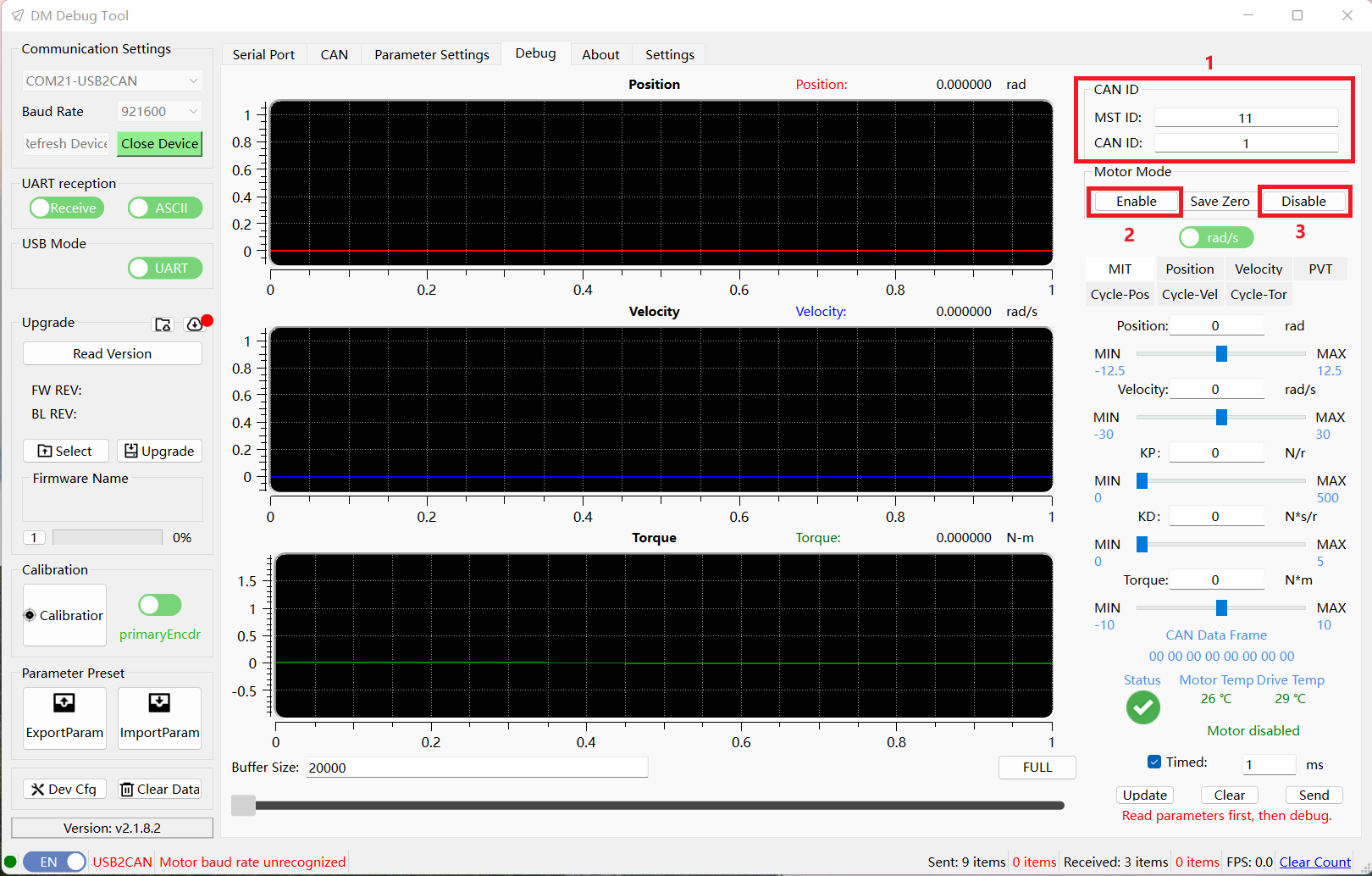
テスト後は、Disable をクリックして有効状態を解除することを忘れないでください。
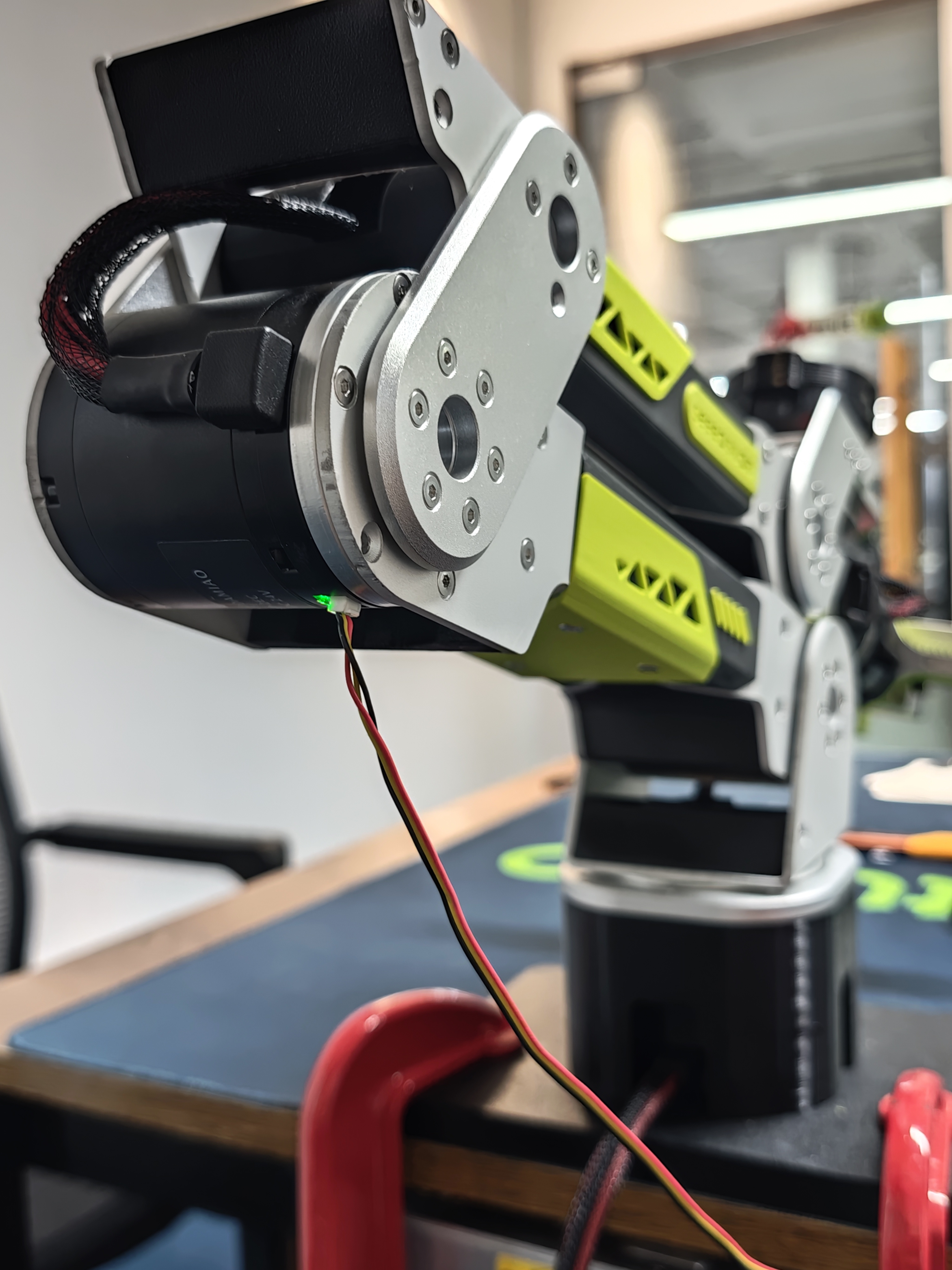
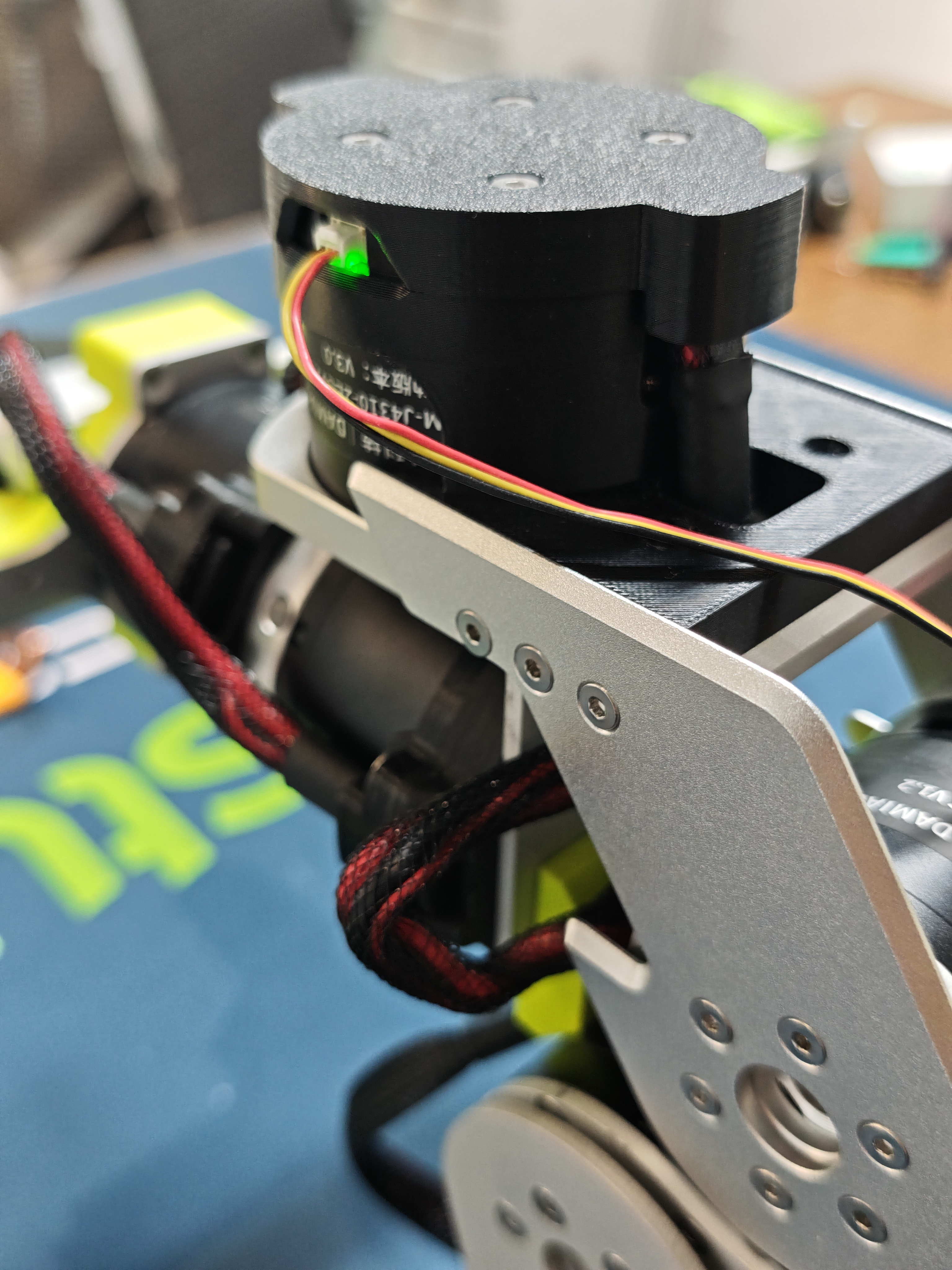
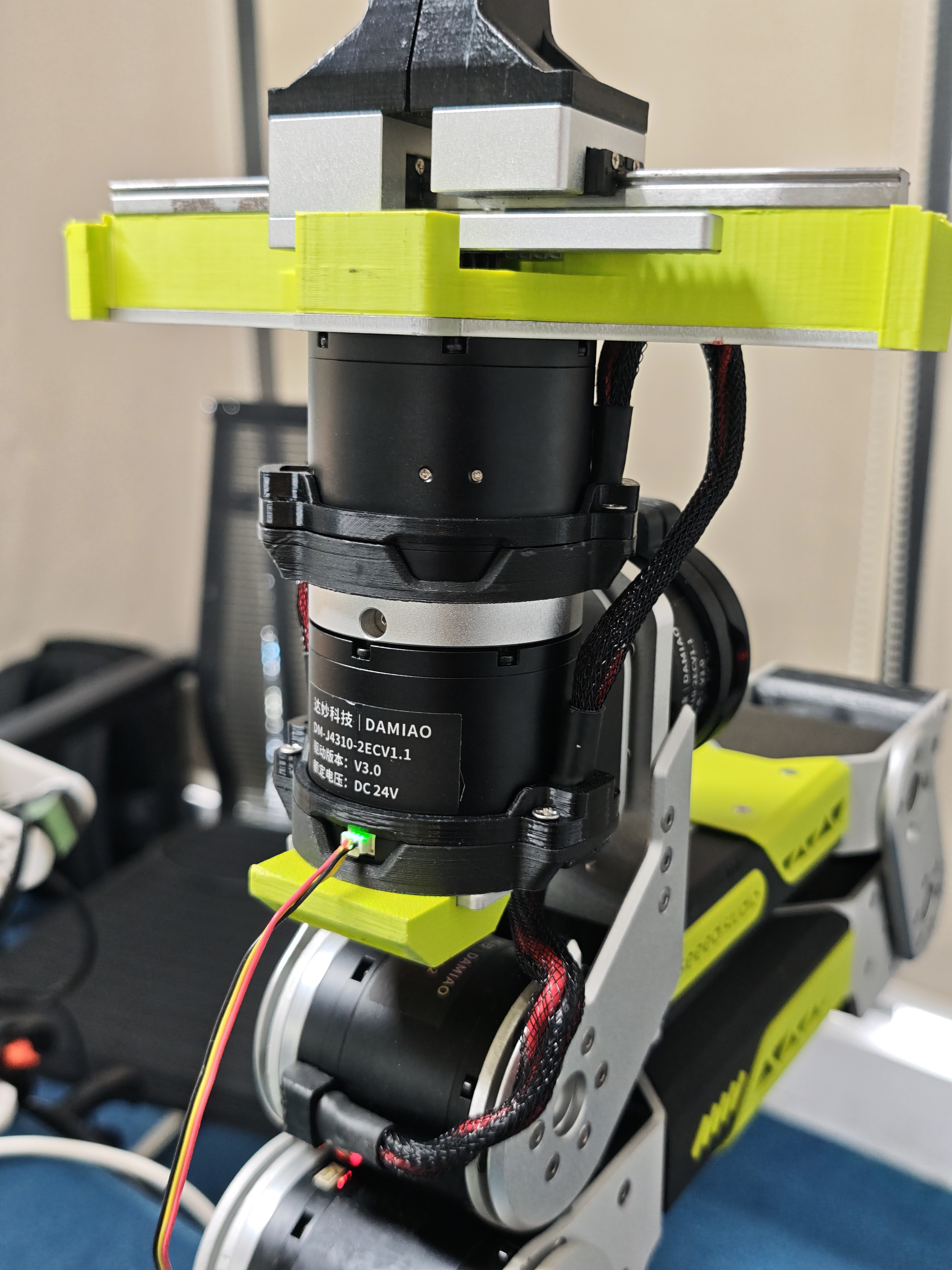
各モーターの3ピンケーブル接続位置と有効化時の状態
| モーター1のセットアップ | モーター2のセットアップ | モーター3のセットアップ | モーター4のセットアップ | モーター5のセットアップ | モーター6のセットアップ | モーター7のセットアップ |
|---|---|---|---|---|---|---|
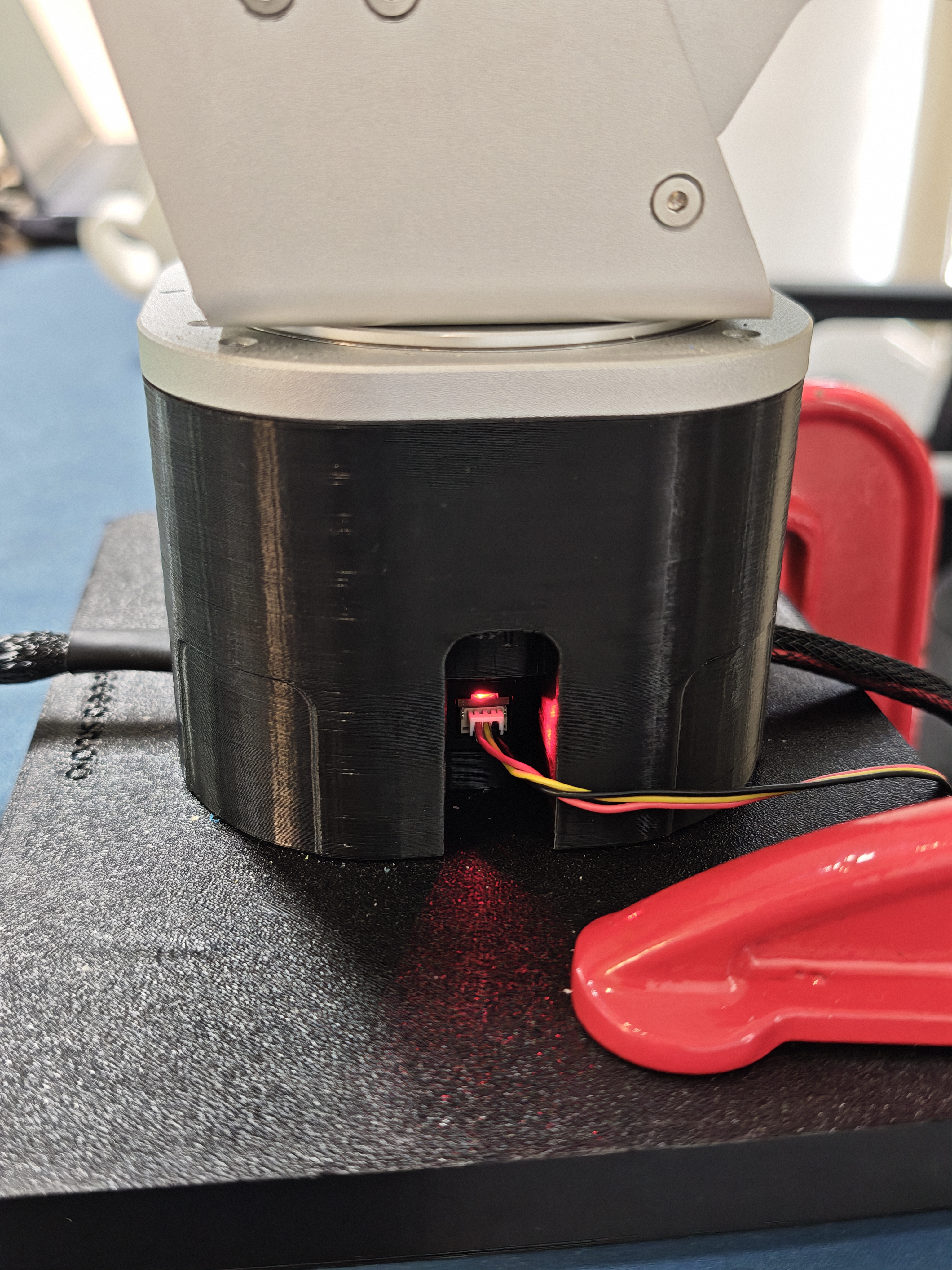 | 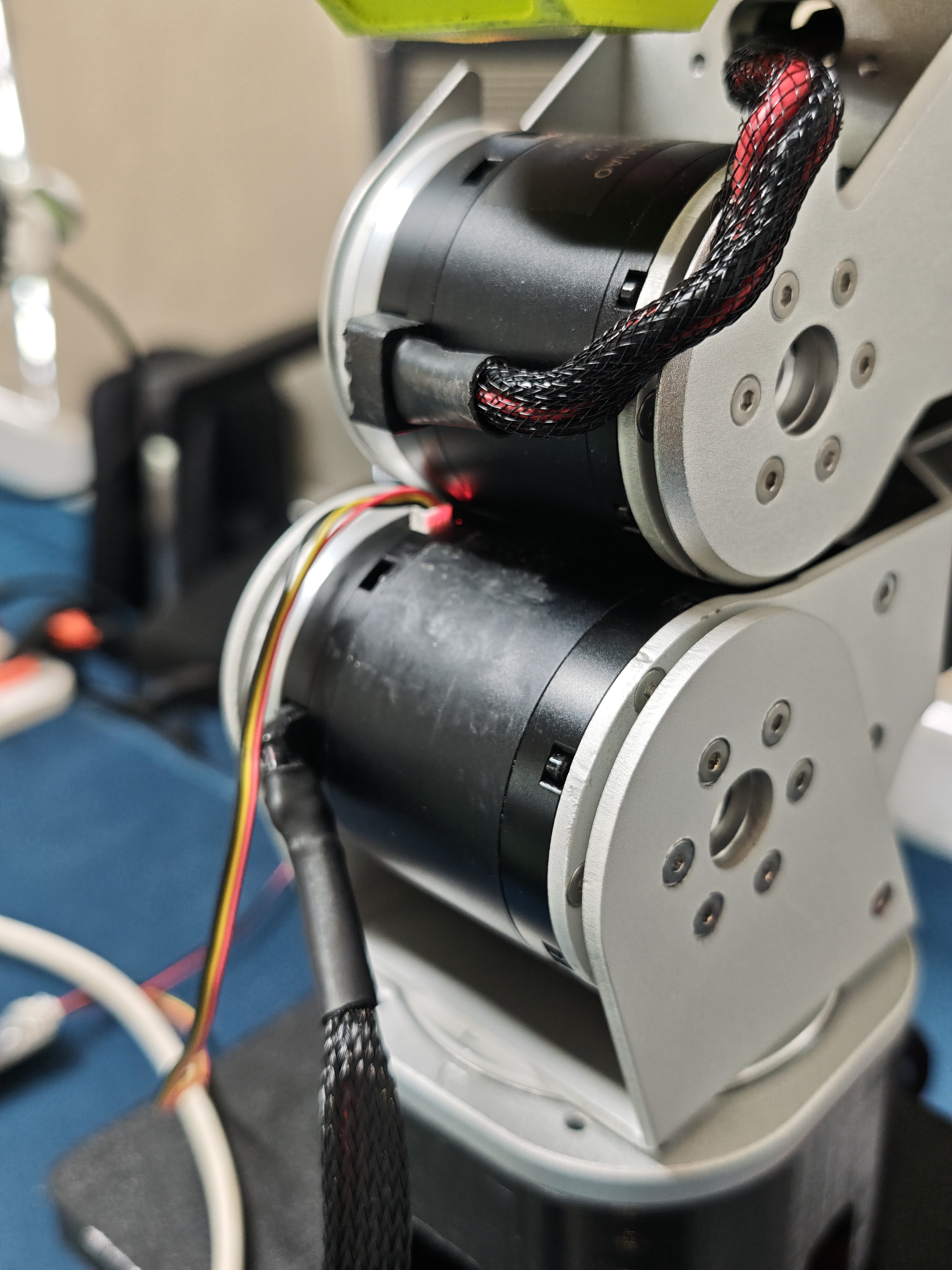 |  | 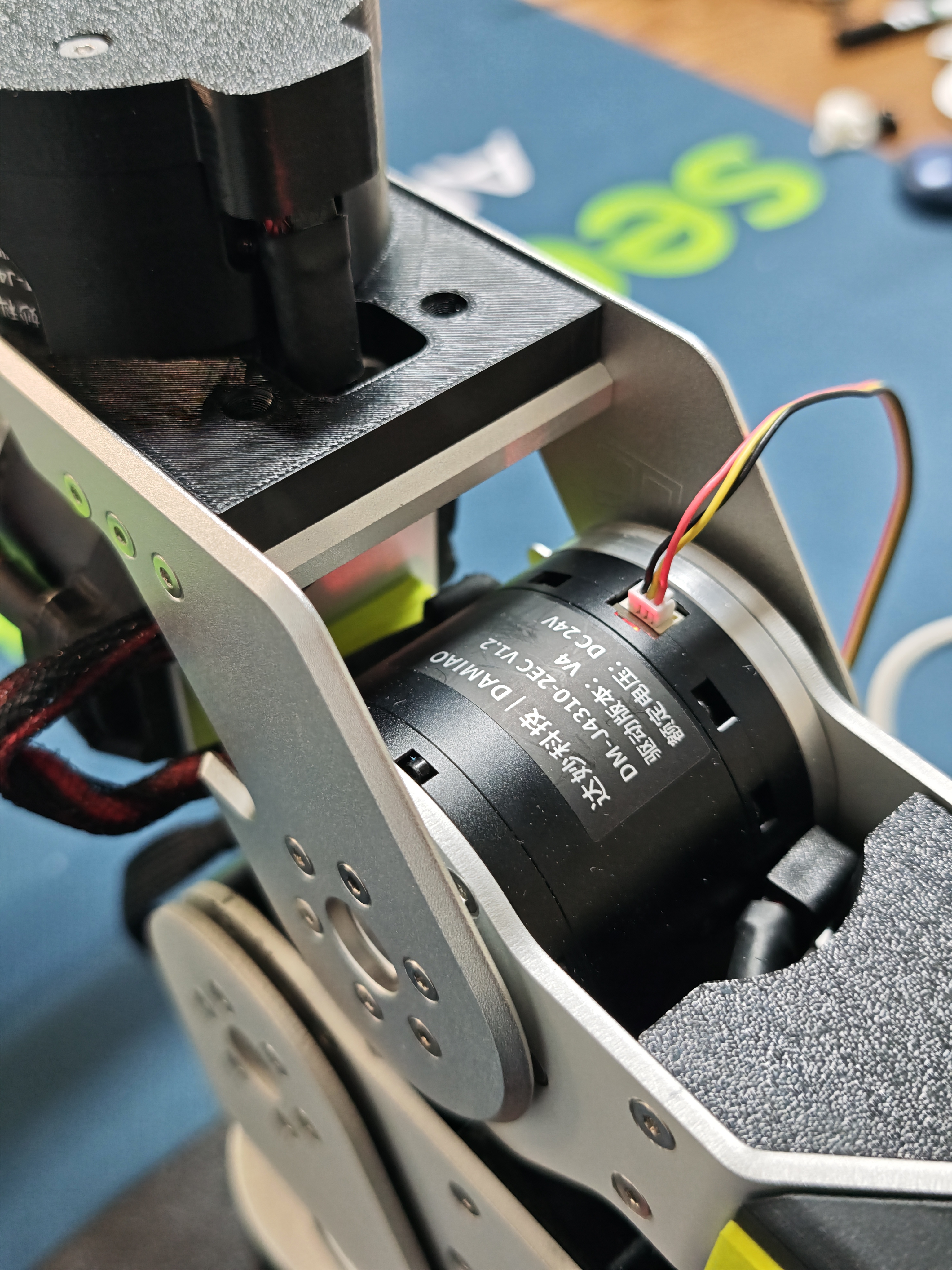 | 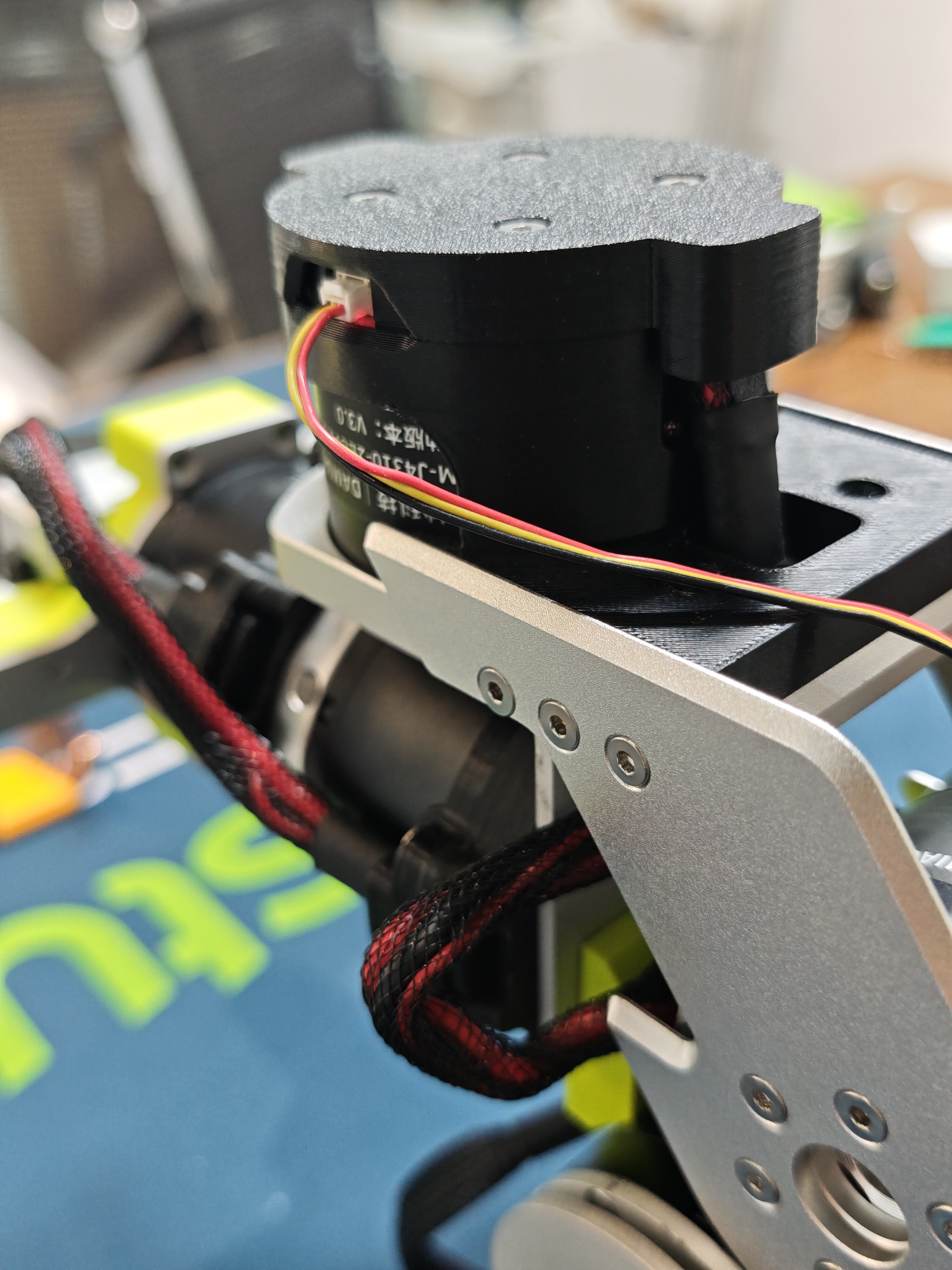 |  |  |
| モーター1 有効 | モーター2 有効 | モーター3 有効 | モーター4 有効 | モーター5 有効 | モーター6 有効 | モーター7 有効 |
|---|---|---|---|---|---|---|
 | 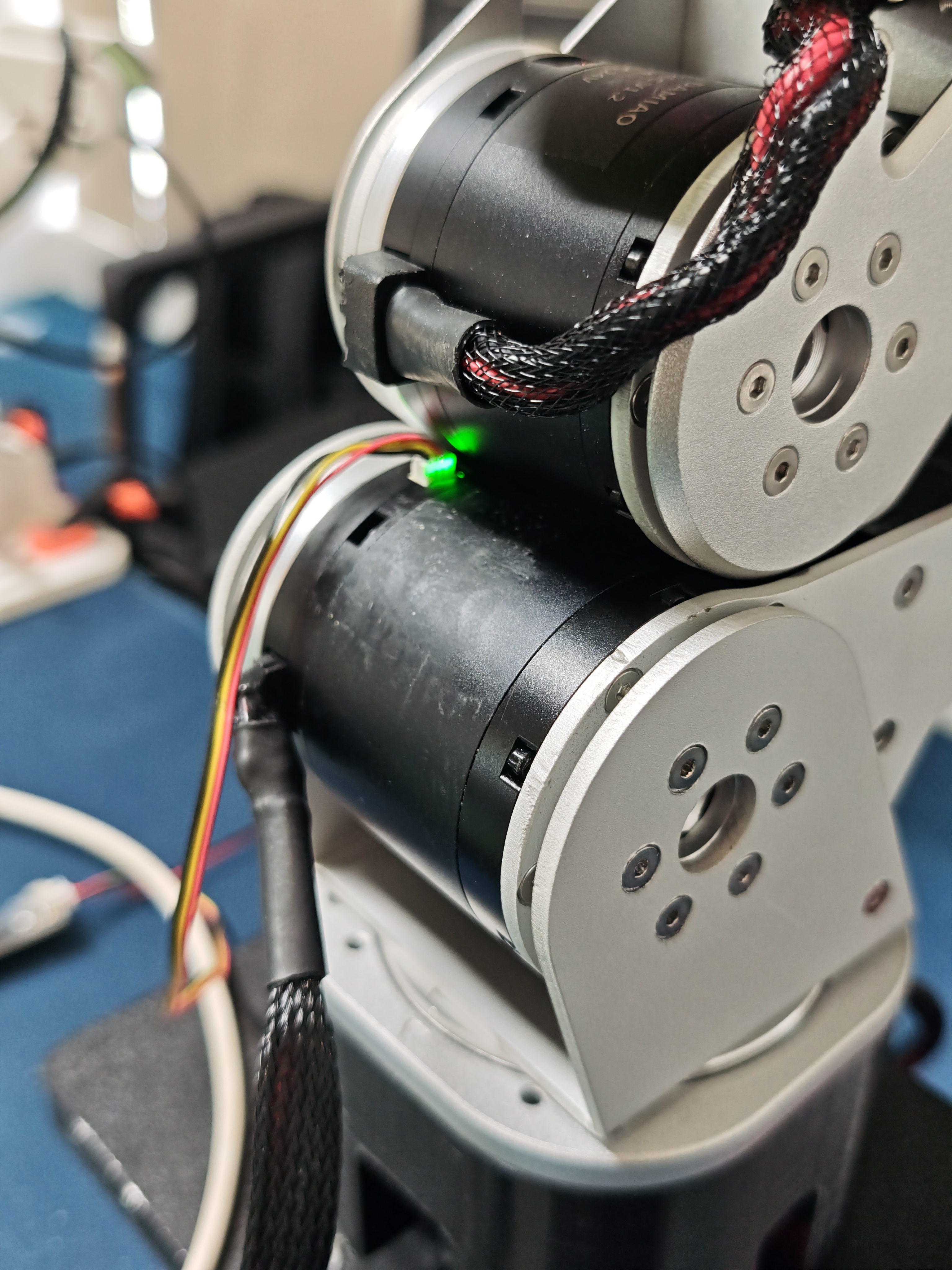 |  |  |  |  |  |
ステップ3:reBot Arm のキャリブレーションと開始
ここまでのビデオに従って、ロボットアームの組み立て、ゼロ点初期化、モーターID設定などの手順を完了していることを前提としています。これで、公開している一連のチュートリアルやツールを本格的に活用する準備が整いました。
ビデオおよびテキストチュートリアルを参照してください。ロボットアームを制御する前に、もう一度ゼロ点をリセットする必要があります。
-
拡張中のモーターラインナップ(Damiao、Robstride、Hightorque、Myactuator、Hexfellow など)をサポートするオールインワンプラットフォーム MotorBridge をご利用ください。継続的にアップデートされる reBot などのロボットアームにも対応しています。初心者向けに設計されており、開発者向けには同等の機能を実装した Python SDK も提供しています。
-
reBot ロボットアーム向け MotorBridge の新機能や詳細を体験してください。ワンクリックでのゼロ点設定、パラメータ書き込み、UI のドラッグ&ドロップによるモーター制御、内蔵モデル可視化インターフェースなどが含まれます。
-
このツールは Windows、Ubuntu、Mac の各オペレーティングシステムに完全対応しています。
ステップ1:Miniforge をインストールする(Windows\Ubuntu\macOS\Jetson\Pi)
Miniforge をインストールし、仮想環境を作成して、他の環境パッケージとの干渉を避けます。
Ubuntu\Jetson\Pi:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
または macOS:
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-MacOSX-$(uname -m).sh"
bash Miniforge3-MacOSX-$(uname -m).sh
または Windows:
ブラウザで Miniforge Release ページを開き、最新の Miniforge3-Windows-x86_64.exe を探してダウンロードします:
https://github.com/conda-forge/miniforge/releases
ステップ2:環境構築
Python 3.12 で仮想環境を作成します:
conda create -y -n rebot python=3.12
次に仮想環境を有効化します。rebot を使用するためには、シェルを開くたびにこの操作を行う必要があります:
conda activate rebot
ステップ3:motorbridge をインストールする
macOS ユーザーへの注意:
macOS でテレオペレーション中にフレームレートが低下する場合、古い WCH CH34x ドライバーが原因の可能性があります。macOS 10.14 以降 では、システムに AppleUSBCHC0M ドライバーが標準搭載されています。古いドライバーをアンインストールして macOS 標準ドライバーに切り替えることで、フレームレートが効果的に改善されるはずです。
reBot の仮想環境を有効化した後、次のコマンドを実行して motorbridge をインストールします:
pip install motorbridge
ステップ4:rebot を接続する
USB ケーブルでロボットアームをコンピュータに接続し、電源をオンにした後、シリアルポートに対して 666 のアクセス権限を設定する必要があります。(Windows システムでは権限設定は不要なため、このステップはスキップできます。)
sudo chmod 666 /dev/ttyACM*
ステップ5:motorbridge を開く
ブラウザで https://motorbridge.github.io/motorbridge-studio/ を開き、ヘルプをクリックします。お使いのシステムとドライバボードに適したコマンドをコピーし、IP とポートを確認してから、ターミナルで Enter キーを押します。
例えば Windows の場合:
motorbridge-gateway -- --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port COM3 --serial-baud 921600 --model 4340P --motor-id 0x01 --feedback-id 0x11 --dt-ms 20

FAQ
1. モーター起動直後に大きな異常音が発生する
- この問題は通常、ID 設定中に誤ってパラメータキャリブレーションをトリガーしてしまい、モーター慣性などの工場出荷時プリセットパラメータが上書きされることで発生します。以下から入手できる DM_Tools_v.1.8.0.1.exe(Windows 専用) を使用してください: https://files.seeedstudio.com/wiki/robotics/projects/rebot_arm/DM_Tools_v1.8.0.1.exe ホストソフトウェアを使用して、同一モデルの正常なモーターから完全なパラメータをエクスポートし、それらのパラメータを不具合のあるユニットにインポートして、対応する CAN ID を更新し、書き込んだパラメータを保存してから、ゼロ点キャリブレーションを実行します。
DM4310 デフォルトパラメータ DM4340P デフォルトパラメータ
2. すべてのモーターが同一の CAN ID を共有している
- DM_Tools_v.1.8.0.1.exe(Windows 専用) でゼロ点キャリブレーションを行う際は、CAN ID フィールド横の Read または Set ボタンをクリックしないでください。デバッグインターフェースは CAN バス経由で通信しており、Set をクリックすると CANBUS に接続されているすべてのモーターの CAN ID が同一に設定されてしまいます。