reCamera Gimbal 概要
reCamera Gimbal 2002シリーズは、1TOPS AIカメラ(reCamera)と2軸ジンバルを搭載した初のオープンソースカメラ制御システムです。デュアルブラシレスモーターにより、360°ヨーと180°ピッチでフルカバレッジを実現します。
機能
- ハードウェアとソフトウェアの完全オープンソースエコシステム
- クイックセットアップと精密な動作
- レゴのような組み立てパッケージサポート
- 360°ヨー回転フルカバレッジと180°ピッチ範囲(床から天井まで)
- ブラシレスモーター精度:スムーズなターゲット追跡のための0.01°ステッピング精度
- AI駆動モーション制御
- 既製のカスタムAIモデル:商用ライセンス付きYOLO11内蔵、Roboflow & SenseCraft AIサポート
- スマートトラッキング:AIがジンバルの動きを自動調整
- すべてのスキルレベルに対応した柔軟な開発
- ジンバル動作のローコードフローカスタマイゼーション用Node-RED内蔵
- より深い開発のためのC++ SDKサポート
仕様
処理システム
| パラメータ | 値 |
|---|---|
| SOC | SG2002 |
| CPU | C906@1GHz + C906@700MHz |
| AI性能 | 1 Tops @ Int8 |
| MCU | 8051 @ 8KB SRAM |
| オペレーティングシステム | Linux |
| メモリ | 256 MB |
| ビデオエンコーダー | 5MP @ 30Fps |
基本仕様
| パラメータ | 値 |
|---|---|
| eMMC | 8GB / 64GB |
| 電源供給 | 12V DC ジャック to XT30 コネクタ |
| 消費電力 | 12V, 185mA (静的) |
カメラ
| パラメータ | 値 |
|---|---|
| センサー | OV5647 |
| 解像度 | 5M (2592×1944) ピクセル |
| チップ | 1/4" CMOSセンサー |
| ピクセルサイズ | 1.4μm |
| 出力フォーマット | RAW 10 |
| 最大フレームレート | フルサイズ: 15fps |
| 絞り | F2.8 |
| 35mm換算焦点距離 | 3.46mm |
| 視野角 | 65° |
| 歪み | <1% |
| レンズ構成 | 5P |
インターフェース
| パラメータ | 値 |
|---|---|
| USB | USB 2.0 Type-C |
| ワイヤレス | Wi-Fi 2.4G/5G Bluetooth 4.2/5.0 |
| ボタン | 1 × 再起動ボタン、1 × ユーザーボタン |
| フィルLED | 4 × 0.3W 白色光 |
| LED | 1 × 電源インジケータ、2 × IOプログラマブルインジケータ |
| マイク | オンボードマイク |
| スピーカー | 外部スピーカー |
モータ仕様
| パラメータ | MS3008 | MS3506 |
|---|---|---|
| ターン数 | 54 | 60 |
| 定格電圧 (V) | 12 | 12 |
| 最大速度 (rpm) | 2000 | 2100 |
| 定格トルク (N·m) | 0.04 | 0.05 |
| 定格速度 (rpm) | 1160 | 1250 |
| 定格電流 (A) | 0.64 | 0.79 |
| 最大出力 (W) | 4.6 | 6.4 |
| モータ極数 | 14 | 14 |
| 動作温度 (℃) | -25~60 | -25~60 |
| 重量 (g) | 49 | 63 |
| ドライブ入力電圧 (V) | 6~16 | 6~16 |
| 通信 | CAN | CAN |
| 通信周波数 | CAN@1Mbps:2KHz | CAN@1Mbps:2KHz |
| エンコーダ | 15ビット磁気エンコーダ | 15ビット磁気エンコーダ |
| CANボーレート | 100K、125K、250K、500K、1M | 100K、125K、250K、500K、1M |
| 制御モード | オープンループ(24KHz) / 速度ループ(4KHz) / 位置ループ(2KHz) | オープンループ(24KHz) / 速度ループ(4KHz) / 位置ループ(2KHz) |
ジンバル仕様
| パラメータ | 値 |
|---|---|
| ピッチ範囲 | 0~180° |
| ヨー範囲 | 0~360° |
環境条件
| パラメータ | 値 |
|---|---|
| 動作温度 | -20~50 ℃ |
| 動作湿度 | 0~90% |
機械的仕様
| パラメータ | 値 |
|---|---|
| 寸法 (W × H × D) | 68×112×71mm |
| 筐体 | ポリアミド (PA) ナイロン |
| 重量 (正味) | 230g |
その他
| パラメータ | 値 |
|---|---|
| 保証 | 1年 |
ハードウェア概要

コアボード-C101
| 上面図 | 底面図 |
|---|


ブロック図

センサーボード-S101
| 上面図 | 底面図 |
|---|


ベースボード-B401
| 上面図 | 底面図 |
|---|


ブロック図

電源供給ボード
この電源供給ボードは、安定した電力供給と過電圧保護の二重機能を提供します。12V DC入力をサポートし、モーターとreCameraシステムの両方に電力を供給します。
過電圧保護しきい値:
- 最大トリップ電圧: 25.66V
- 通常動作電圧: 25.54V
- 最小安全電圧: 25.4V
ブロック図

ハードウェアインターフェース
ライト
reCameraには3つのインジケーターがあります。赤と青のライトはプログラム可能なインジケーターで、緑のインジケーターはプログラム不可能な電源インジケーターです。赤はCPUのステータスインジケーター、青はシステムeMMCの読み取りステータスインジケーターです。
ライトインジケーターステータス:
| LED(色) | ステータス | 説明 |
|---|---|---|
| LED1 - 緑 | 点灯 | 電源オン |
| LED2 - 赤 | 点滅 | CPU動作中(ユーザー定義) |
| LED3 - 青 | 点滅 | eMMC読み取り/書き込み |
例1: Linuxコマンドを使用して赤色LEDの輝度をゼロに変更する
echo 0 | sudo tee /sys/class/leds/red/brightness
例2:赤色ライトを完全に消灯する
echo none | sudo tee /sys/class/leds/red/trigger
4つの白いライトがあり、これらはカメラの補助照明です。補助照明のスイッチは以下の指示で制御できます。
echo 1 > /sys/devices/platform/leds/leds/white/brightness //light on
echo 0 > /sys/devices/platform/leds/leds/white/brightness //light off
マイク & スピーカー
recameraにはマイクとスピーカーが搭載されています。以下のコマンドでマイクとスピーカーを呼び出すことができます。recameraはwav形式の音声ファイルを再生できます。
sudo arecord -D hw:0,0 -r 16000 -f S16_LE -c 1 -d 5 /home/recamera/test.wav //Record five seconds of audio
sudo aplay -D hw:1,0 /home/recamera/test.wav //Playing audio
ローカルのmp3音声ファイルは、Convert audio onlineを使用してwavファイルに変換し、recameraで再生することができます。 プレーヤーのデフォルト形式は:16bitビットレート;サンプリングレートは16,000です

Wi-Fi
reCamera 2002wバージョンは、ハードウェアにWi-Fiモジュールを搭載しています。Wi-FiはAP+STAデュアルモードで、デバイスネットワークの設定やAPモードでのデバイス設定に使用できます。
APモードでのwifiのSSIDは:reCamera_+ MACの下位6桁です。
APモードでのwifiのPasswdは:12345678です。
WiFi_APのssidとpasswdは、recameraシステムの/etc/hostapd_2g4.confファイルで設定できます。

reCamera STAの設定ファイルは**/etc/wpa_supplicant.conf**にあり、ここで接続するWi-Fiアカウントとパスワードを設定します。 STAモードでは、5G帯域のWi-Fiに接続してください。

ターミナルでは、以下のコマンドでWi-Fiをスキャンして接続できます:
wpa_cli -i wlan0 scan #Start a scan
wpa_cli -i wlan0 scan_results #Returns wifi scan results
wpa_cli add_network # Adding a new network,Returns a network ID
wpa_cli set_network ID ssid "your_wifi_name" # set network SSID
wpa_cli set_network ID psk "your_wifi_password" # set network passwd
wpa_cli enable_network ID # enable network and connect
wpa_cli status # Checking connection status

ボタン
ユーザーボタン
10 ユーザーボタンはreCamera Gimbal Board-B401に配置されています。デバイスのパスコードを忘れた場合などでデバイスをリセットしたい場合は、ユーザーボタンを長押ししてからデバイスを電源に接続してください。デバイスの赤いライトが点滅ではなく常時点灯になったら、ユーザーボタンを離してください。
デバイスのファームウェアを特定のバージョンに復元したい場合は、osバージョン制御をご覧ください。
再起動ボタン
11 再起動ボタンはreCamera Gimbal Board-B401に配置されています。このボタンを押すと、システムが再起動されます。
モーター
reCamera Gimbalには、ジンバルのモーターをデバッグおよび制御するために使用できるGimbalスクリプトがあります。 gimbalスクリプトの動作を確認するには、以下のコマンドを実行してください:
gimbal --help
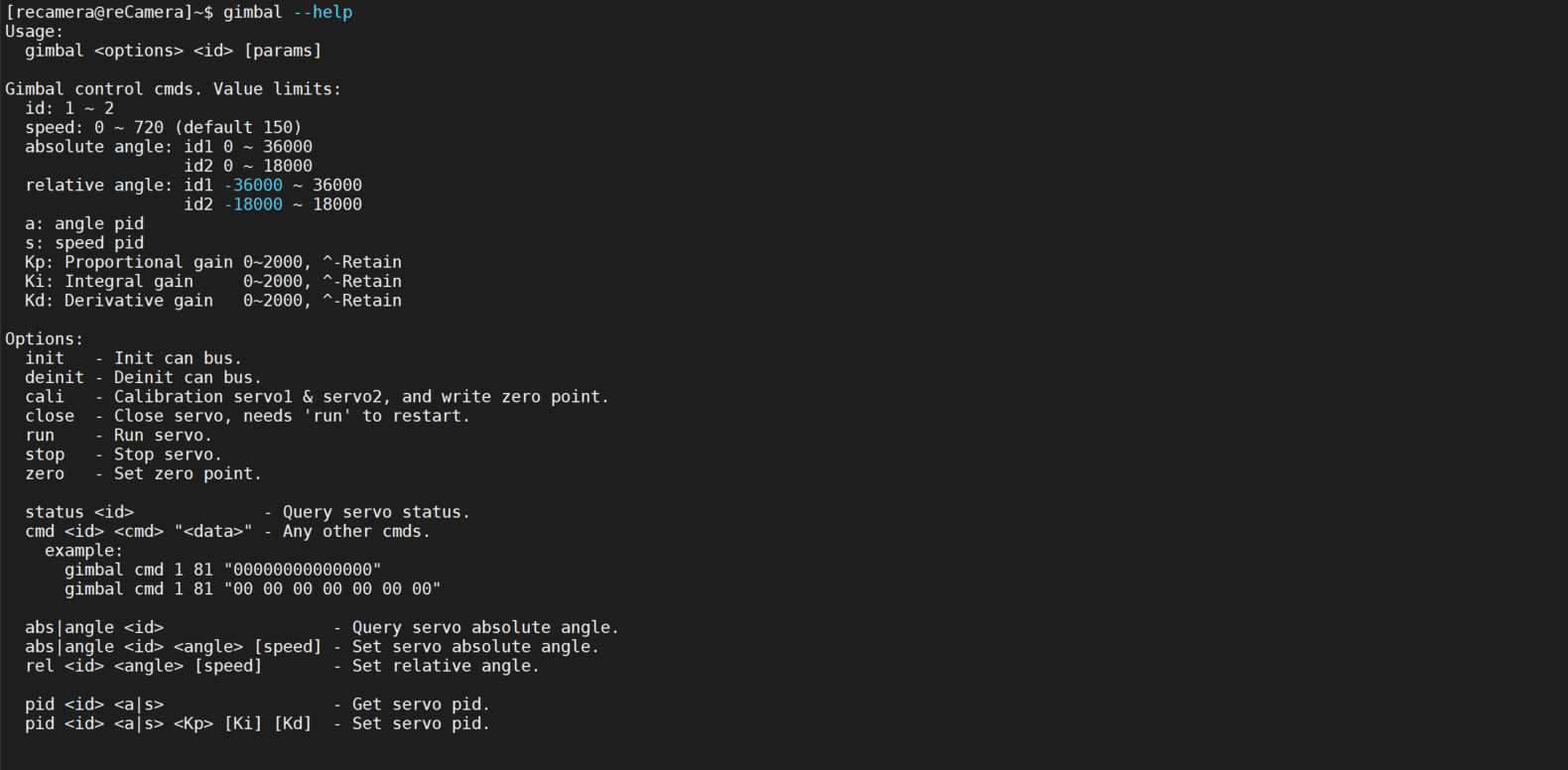
gimbal はbashスクリプトです。スクリプトを表示・修正して、二次開発のニーズを満たすことができます。スクリプトの場所は以下の通りです:
cd /usr/bin
cat gimbal

CAN
ifconfig コマンドを使用して can0 インターフェースを表示します:

cansend can0 can_id#9C.00.00.00.00.00.00.00 コマンドを使用してcanメッセージを送信します:

candump can0 コマンドを使用してcanメッセージを受信します:

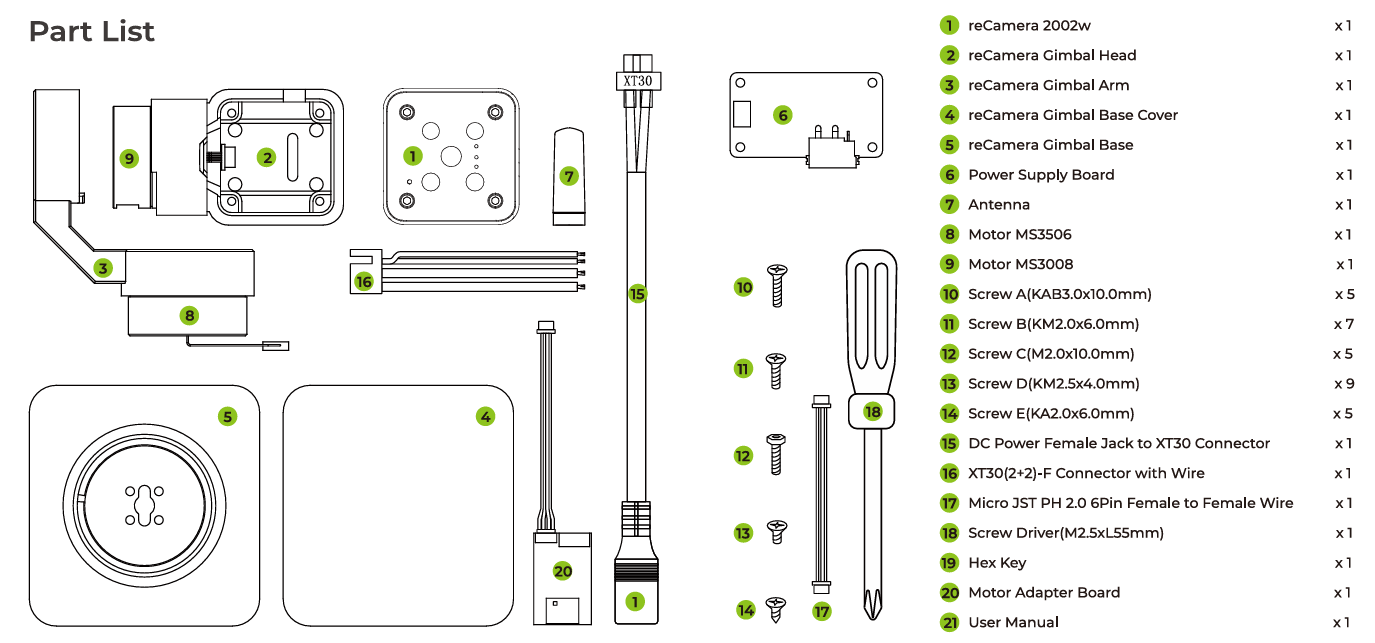
パーツリスト
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。