reComputer Industrial R20xx を設定する
概要
デバイスを取り付けた後に、reComputer Industrial R20xx シリーズ上のハードウェアコンポーネントを設定およびテストする方法を学びます。この Wiki では、GPIO マッピング、USER LED テスト、SPI 通信、Wi-Fi および Bluetooth スキャン、LoRa®、4G、5G、RS485、RS232、DI/DO テスト、安全なシャットダウンのための UPS などについて説明します。

GPIO マッピングとオフセットの確認
GPIO マッピングとオフセットを確認するには、次の手順に従います。
- 次のコマンドをコピー&ペーストして、GPIO マッピングを確認します。
cat /sys/kernel/debug/gpio
このコマンドは GPIO マッピングとオフセットを表示し、GPIO ピンのデバッグや設定に必要な情報を提供します。
USER LED テスト
ユーザーが使用できるように、赤、青、緑の 3 色の LED を用意しています。/sys/class/leds/ ディレクトリに入って確認できます:
1. LED ディレクトリへ移動する
cd /sys/class/leds/
ls
次のコマンドを使用して、対応する色の LED を点灯させます。
sudo su
echo 1 > /sys/class/leds/led-red//brightness
echo 1 > /sys/class/leds/led-blue/brightness
echo 1 > /sys/class/leds/led-green/brightness
これにより、対応する LED が点灯します。
3. LED を消灯する(任意)
特定の LED を消灯するには、次を使用します。
echo 0 > /sys/class/leds/led-red/brightness
echo 0 > /sys/class/leds/led-blue/brightness
echo 0 > /sys/class/leds/led-green/brightness
SPI 通信のテスト
TPM モジュールの MISO と MOSI ピンをショートさせて SPI 通信をテストするには、次の手順に従います。
- spidev-test リポジトリをクローンします。
# Don't forget to connect to network before running command
git clone https://github.com/rm-hull/spidev-test.git
- spidev-test ディレクトリに移動します。
cd spidev-test
- spidev_test.c ファイルをコンパイルします。
gcc spidev_test.c -o spidev_test
- 次のコマンドで spidev_test プログラムを実行します。
./spidev_test -D /dev/spidev10.0 -v -p hello
このコマンドは、指定した SPI デバイス(/dev/spidev10.0)上で SPI 通信をテストし、詳細出力( -v )を有効にして、メッセージ "hello"(-p hello)を送信します。 TPM モジュールの MISO と MOSI ピンをショートさせることで、MOSI から送信されたデータが MISO で受信されるループバック状態を作り出します。この構成により、実際のデバイスを接続しなくても SPI 通信をテストできます。
Wi-Fi スキャン
利用可能な Wi-Fi ネットワークとその詳細を一覧表示するには、次を実行します。
sudo iwlist wlan0 scan
- このコマンドは周辺のすべての Wi-Fi ネットワークをスキャンし、その SSID、信号強度、暗号化方式を表示します。
Bluetooth スキャン
Bluetooth デバイスをスキャンするには、次の手順に従います。
Bluetooth 制御インターフェースを開く:
sudo bluetoothctl
このコマンドで Bluetooth 制御インターフェースが開きます。そこから、周辺の Bluetooth デバイスをスキャンするための追加コマンドを実行できます。
スキャンを有効化する:
scan on
このコマンドで周辺の Bluetooth デバイスのスキャンが開始されます。その後、bluetoothctl インターフェース内の他のコマンドを使用して、ペアリングや接続など、Bluetooth デバイスとやり取りできます。
Mini-PCIe 経由の LoRa®
LoRa® SPI 設定
LoRa® SPI を Mini-PCIe スロット 2 に取り付けた後、次の手順で LoRa® SPI を設定できます。
- SX1302_HAL リポジトリをクローンします。
cd ~/
git clone https://github.com/Lora-net/sx1302_hal
- クローンしたディレクトリに移動します。
cd sx1302_hal
- 設定ファイルを編集します。
I2C デバイスの設定ファイルを開きます。
sudo nano ./libloragw/inc/loragw_i2c.h
次の行を変更します。
#define I2C_DEVICE "/dev/i2c-1"
次のように変更します。
#define I2C_DEVICE "/dev/i2c-2"
#define I2C_DEVICE "/dev/i2c-1" を #define I2C_DEVICE "/dev/i2c-2" に変更します。 ctrl+x を押して終了し、y を押して変更を保存し、その後 Enter を押してコマンドライン画面に戻ります。
- packet_forwarder/reset_lgw.sh ファイルを追加します。
sudo nano packet_forwarder/reset_lgw.sh
実行コードを追加します。
#!/bin/sh
# This script is intended to be used on SX1302 CoreCell platform, it performs
# the following actions:
# - export/unpexort GPIO23 and GPIO18 used to reset the SX1302 chip and to enable the LDOs
# - export/unexport GPIO22 used to reset the optional SX1261 radio used for LBT/Spectral Scan
#
# Usage examples:
# ./reset_lgw.sh stop
# ./reset_lgw.sh start
# GPIO mapping has to be adapted with HW
#
SX1302_RESET_PIN=632 # SX1302 reset
SX1302_POWER_EN_PIN=633 # SX1302 power enable
SX1261_RESET_PIN=634 # SX1261 reset (LBT / Spectral Scan)
AD5338R_RESET_PIN=623 # AD5338R reset (full-duplex CN490 reference design)
WAIT_GPIO() {
sleep 0.1
}
init() {
# setup GPIOs
echo "$SX1302_RESET_PIN" > /sys/class/gpio/export; WAIT_GPIO
echo "$SX1261_RESET_PIN" > /sys/class/gpio/export; WAIT_GPIO
echo "$SX1302_POWER_EN_PIN" > /sys/class/gpio/export; WAIT_GPIO
echo "$AD5338R_RESET_PIN" > /sys/class/gpio/export; WAIT_GPIO
# set GPIOs as output
echo "out" > /sys/class/gpio/gpio$SX1302_RESET_PIN/direction; WAIT_GPIO
echo "out" > /sys/class/gpio/gpio$SX1261_RESET_PIN/direction; WAIT_GPIO
echo "out" > /sys/class/gpio/gpio$SX1302_POWER_EN_PIN/direction; WAIT_GPIO
echo "out" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/direction; WAIT_GPIO
}
reset() {
echo "CoreCell reset through GPIO$SX1302_RESET_PIN..."
echo "SX1261 reset through GPIO$SX1302_RESET_PIN..."
echo "CoreCell power enable through GPIO$SX1302_POWER_EN_PIN..."
echo "CoreCell ADC reset through GPIO$AD5338R_RESET_PIN..."
# write output for SX1302 CoreCell power_enable and reset
echo "1" > /sys/class/gpio/gpio$SX1302_POWER_EN_PIN/value; WAIT_GPIO
echo "1" > /sys/class/gpio/gpio$SX1302_RESET_PIN/value; WAIT_GPIO
echo "0" > /sys/class/gpio/gpio$SX1302_RESET_PIN/value; WAIT_GPIO
echo "0" > /sys/class/gpio/gpio$SX1261_RESET_PIN/value; WAIT_GPIO
echo "1" > /sys/class/gpio/gpio$SX1261_RESET_PIN/value; WAIT_GPIO
echo "0" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/value; WAIT_GPIO
echo "1" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/value; WAIT_GPIO
}
term() {
# cleanup all GPIOs
if [ -d /sys/class/gpio/gpio$SX1302_RESET_PIN ]
then
echo "$SX1302_RESET_PIN" > /sys/class/gpio/unexport; WAIT_GPIO
fi
if [ -d /sys/class/gpio/gpio$SX1261_RESET_PIN ]
then
echo "$SX1261_RESET_PIN" > /sys/class/gpio/unexport; WAIT_GPIO
fi
if [ -d /sys/class/gpio/gpio$SX1302_POWER_EN_PIN ]
then
echo "$SX1302_POWER_EN_PIN" > /sys/class/gpio/unexport; WAIT_GPIO
fi
if [ -d /sys/class/gpio/gpio$AD5338R_RESET_PIN ]
then
echo "$AD5338R_RESET_PIN" > /sys/class/gpio/unexport; WAIT_GPIO
fi
}
case "$1" in
start)
term # just in case
init
reset
;;
stop)
reset
term
;;
*)
echo "Usage: $0 {start|stop}"
exit 1
;;
esac
exit 0
ctrl+x を押して終了し、y を押して変更を保存し、その後 Enter を押してコマンドライン画面に戻ります。
- 設定コードを修正します。
sudo vim ./tools/reset_lgw.sh
ピン設定を更新します。
SX1302_RESET_PIN=632 # SX1302 reset
SX1302_POWER_EN_PIN=633 # SX1302 power enable
SX1261_RESET_PIN=634 # SX1261 reset (LBT / Spectral Scan)
# AD5338R_RESET_PIN=13 # AD5338R reset (full-duplex CN490 reference design)
18、29、35、42、53、54 行目をそれぞれコメントアウトします。
......
# echo "$AD5338R_RESET_PIN" > /sys/class/gpio/export; WAIT_GPIO
......
# echo "out" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/direction; WAIT_GPIO
......
# echo "CoreCell ADC reset through GPIO$AD5338R_RESET_PIN..."
......
# echo "0" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/value; WAIT_GPIO
# echo "1" > /sys/class/gpio/gpio$AD5338R_RESET_PIN/value; WAIT_GPIO
ctrl+x を押して終了し、y を押して変更を保存し、その後 Enter を押してコマンドライン画面に戻ります。
- 使用しているモジュールに応じて選択される global_conf.json.sx1250.US915 設定ファイル内で、LoraWAN® モジュールのデフォルト SPI ポートを置き換えます。
sudo nano packet_forwarder/global_conf.json.sx1250.US915
com_path パラメータを変更し、"com_path": "/dev/spidev0.0" を "com_path": "/dev/spidev2.0" に変更します。
- コードをコンパイルします。
sudo make
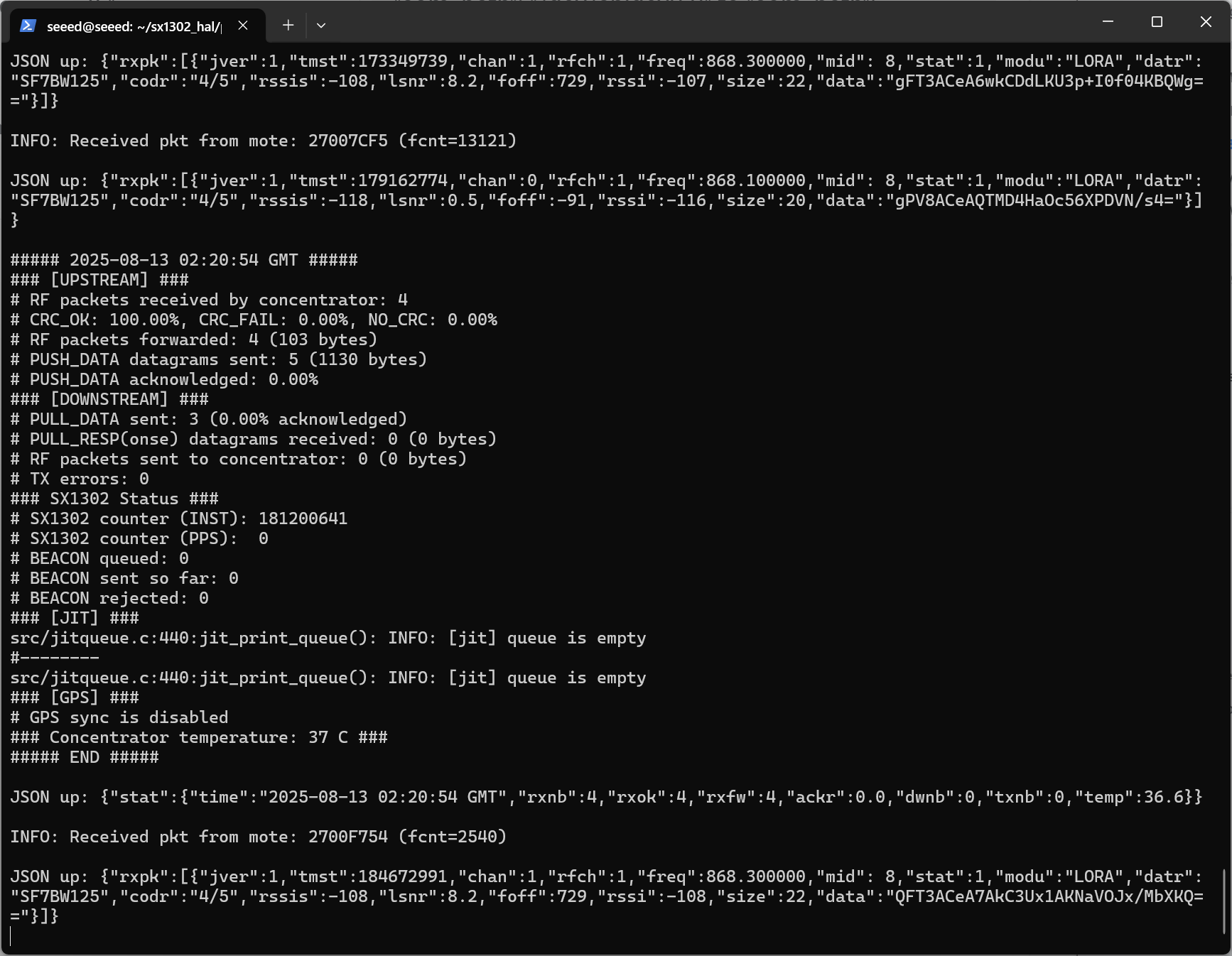
これらの手順により、LoRa® SPI が設定され、指定した設定ファイルを使用してパケットフォワーダーが実行されます。
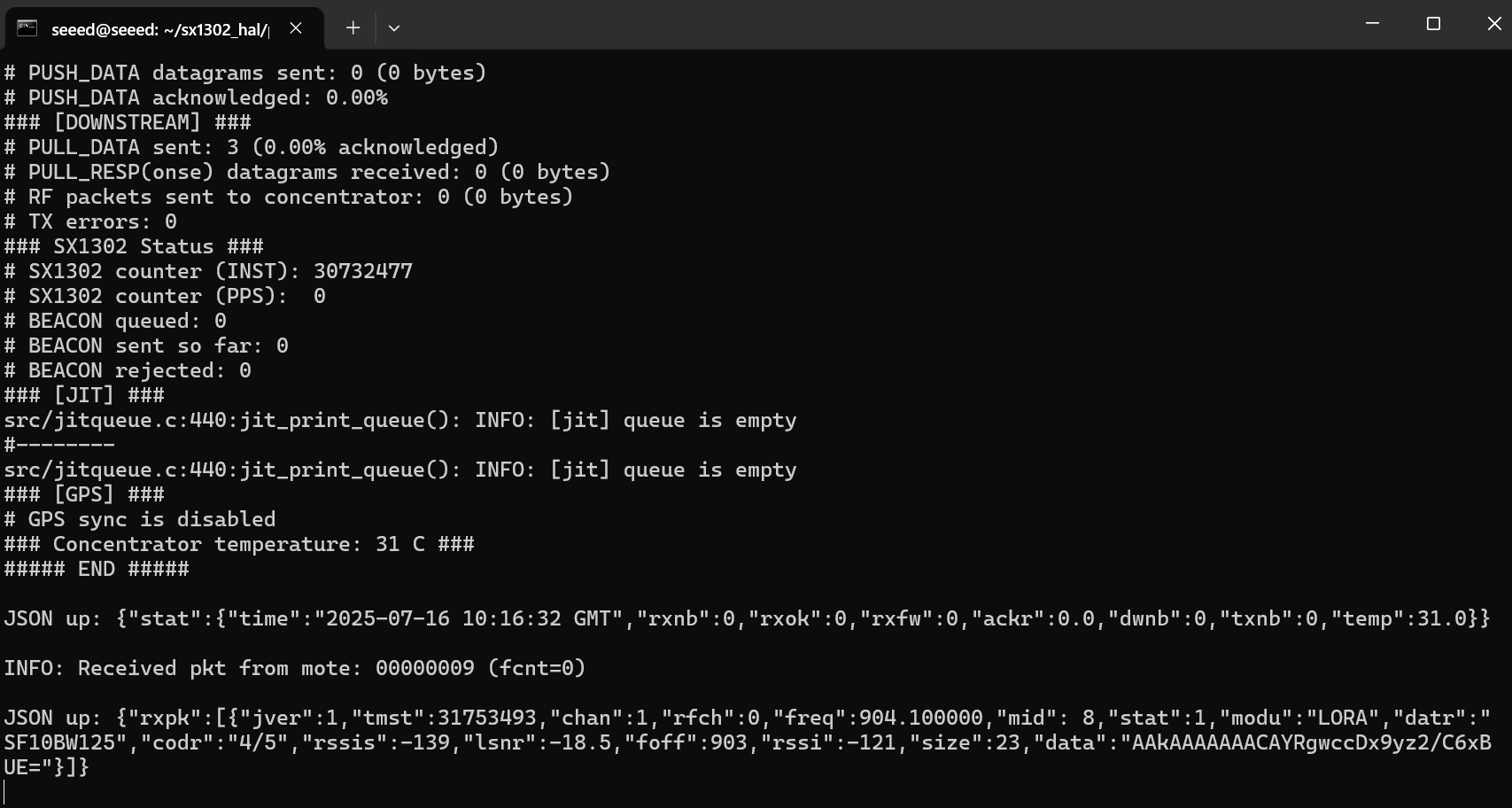
LoRa® USB 設定
LoRa® USB の場合、前述のコマンドは LoRa® SPI の場合と同じです。ただし、最後のコマンドのみ次のように変更する必要があります。
cho 632 > /sys/class/gpio/export
echo "out" > /sys/class/gpio/gpio632/direction
echo "1" > /sys/class/gpio/gpio632/value
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
このコマンドは、LoRa® USB に使用する設定ファイルを指定します。
M.2 B-KEY 経由の 5G セルラー
minicom を介して AT コマンドを使用し、5G/4G モジュールとやり取りするには、次の手順に従います。
- 新しい power_5g.sh ファイルを作成します。:
nano power_5g.sh
sudo nano で開き、次のコマンドを入力してから ctrl+x を押して保存し終了します。
#!/bin/bash
RESET_PIN=645
POWER_PIN=639
if [ ! -d "/sys/class/gpio/gpio$RESET_PIN" ]; then
echo $RESET_PIN > /sys/class/gpio/export
fi
if [ ! -d "/sys/class/gpio/gpio$POWER_PIN" ]; then
echo $POWER_PIN > /sys/class/gpio/export
fi
echo "out" > /sys/class/gpio/gpio$RESET_PIN/direction
echo "out" > /sys/class/gpio/gpio$POWER_PIN/direction
echo 1 > /sys/class/gpio/gpio$RESET_PIN/value
echo 1 > /sys/class/gpio/gpio$POWER_PIN/value
echo "Start to reboot 5g module"
echo 0 > /sys/class/gpio/gpio$RESET_PIN/value
sleep 0.05
echo 0 > /sys/class/gpio/gpio$POWER_PIN/value
echo "5g module reboot completed"
- ファイルを実行します:
sudo ./power_5g.sh
10〜15 秒後(モジュールの電源投入と USB の列挙に時間がかかります)、デバイスノードが出現するか確認します:
ls /dev/ttyUSB*
/dev/ttyUSB0 などが出力されます:

適切なシリアルポートとボーレートで minicom を開きます:
sudo apt update
sudo apt install minicom
sudo minicom -D /dev/ttyUSB2 -b 115200
このコマンドは、指定したシリアルポート(/dev/ttyUSB2)をボーレート 115200 で minicom で開きます。
- minicom を開いたら、4G モジュールに AT コマンドを送信し始めることができます。例えば:
AT
このコマンドはモジュールが応答しているかどうかを確認します。モジュールが正常に動作していれば、"OK" という応答が返ってくるはずです。
- 4G モジュールを使用して電話番号に発信するには、ATD コマンドの後に電話番号を続けて使用します:
ATD<phone_number>;
phone_number を、発信したい目的の電話番号に置き換えてください。 コマンドの末尾にセミコロン ; を付けて、電話番号の終わりを示すようにしてください。
Mini-PCIe 経由の 4G セルラー
新しい power_4g.sh ファイルを作成します:
sudo nano power_4g.sh
sudo nano で開き、次のコマンドを入力してから ctrl+x を押して保存して終了します。
# SIM_MUX_SEL
echo 643 > export
echo out > gpio643/direction
echo 0 > gpio643/value
ファイルを実行します:
sudo ./power_4g.sh
10〜15 秒後(モジュールの電源投入と USB の列挙に時間がかかります)、デバイスノードが出現するか確認します:
ls /dev/ttyUSB*
/dev/ttyUSB0 が出力されます。 GPIO の実際の動作を確認します:
cat /sys/class/gpio/gpio645/value # should be 0
cat /sys/class/gpio/gpio639/value # should be 0
両方の値が 0 → スクリプトが正しくプルダウンされ、モジュールが動作状態になっています。 minicom に入ってコマンドを送信します:
sudo minicom -D /dev/ttyUSB2 -b 115200
● Ctrl+A,Z,E を順番に押します。まず AT を送信して接続されているかテストします。OK が表示されれば接続は成功です。 次のコマンドを実行すると、モジュールは自動的に再起動します。minicom を終了しなければ、対応する設定情報を確認できます。 ECM ダイヤルアップによるインターネット接続:
AT+QCFG="usbnet",1
最後の行に OK と表示されれば成功です。
Note しばらく待つ必要があり、その後 ifconfig で usb0 の IP アドレスを確認できます。
ネットワーク状態と通信をテストします:
# Check network status
ifconfig
# Test communication
ping www.baidu.com -I usb0
RS485 テスト
reComputer Industrial R20xx には 3 つの RS485 ポート が含まれています。以下はそれぞれの COM ポート と デバイスファイル です:
| RS485 ポート数 | COM ポート | シルク印刷ラベル | デバイスファイル |
|---|---|---|---|
| RS485-2 | COM2 | A2/B2/GND2 | /dev/ttyACM1 |
| RS485-3 | COM3 | A3/B3/GND3 | /dev/ttyACM2 |
| RS485-4 | COM4 | A4/B4/GND4 | /dev/ttyACM3 |
RS485 機能をテストするには、以下の手順に従うことができます(RS485_1 と RS485_2 を例とします):
- RS485_1 と RS485_2 の A と B を接続してください。
- それぞれ 2 つのターミナルウィンドウで minicom を開きます:
sudo minicom -D /dev/ttyACM1
sudo minicom -D /dev/ttyACM2
拡張ボードがある場合、番号を 1 つ後ろにずらす必要があります。例えば /dev/ttyAcM2、/dev/ttyAcM3 のようになります。
- 開いた両方の ACM で、次の操作を行う必要があります:
-
Ctrl+A を押し、次に Z を押すと、Minicom Command Summary インターフェースが表示されます:
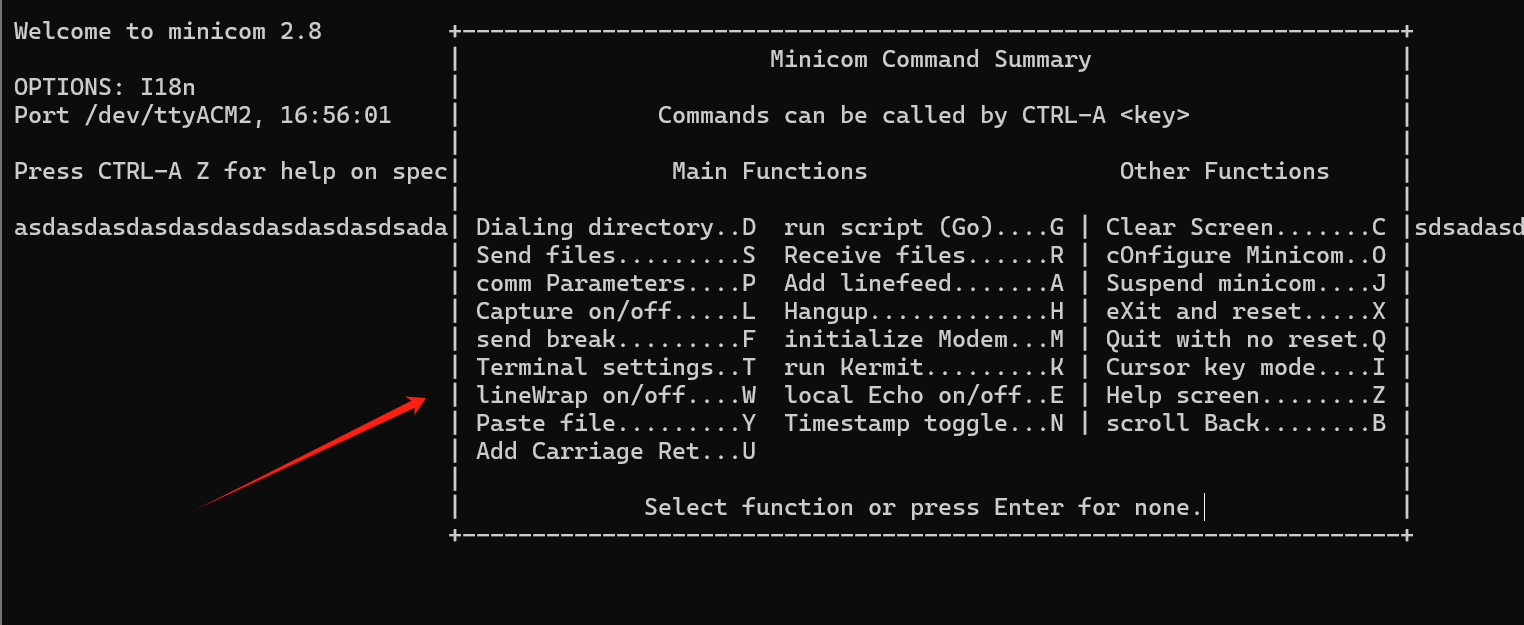
-
さらに O を押して設定を開き、Serial port setup を選択して Enter を押します。すべての RS485 関連インターフェースを開き、H/I/J/K/L を順番に押して有効にします。
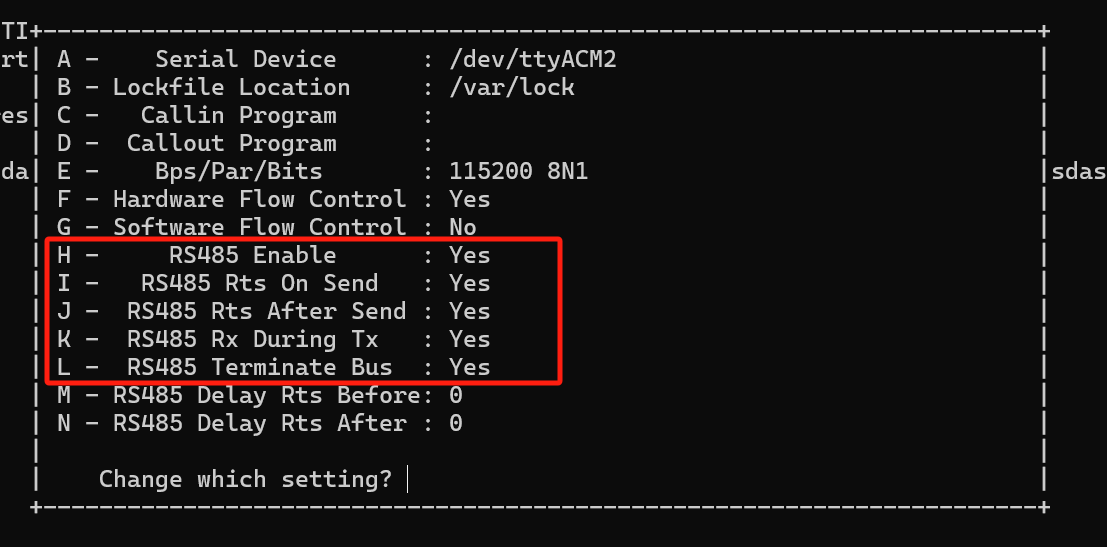
-
すべてが "YES" と表示されたら Enter を押して戻り、その後 Exit を選択して終了します。
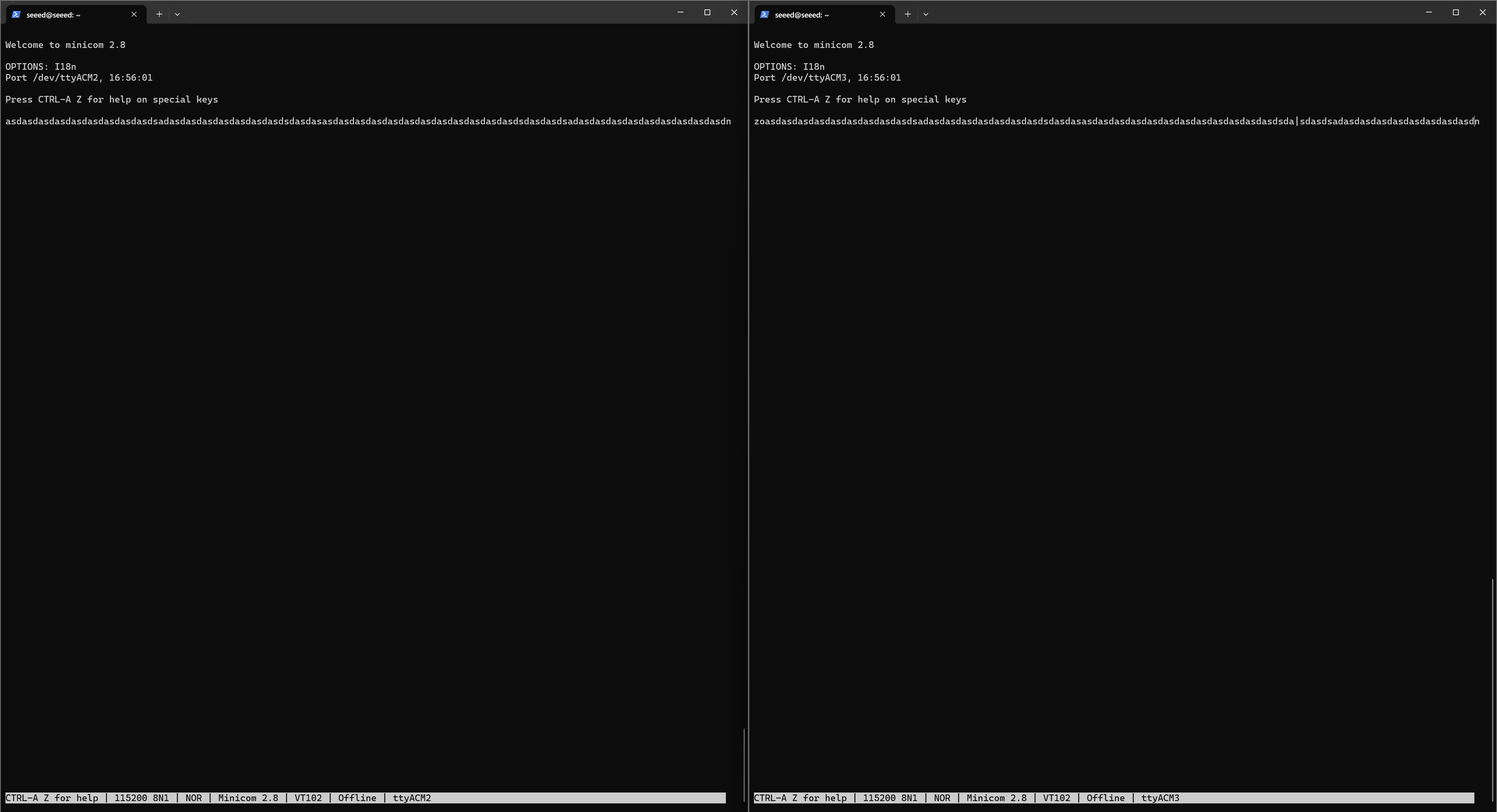
ACM2 と ACM3 を例にとります: ACM2 から ACM3 に送信したい場合、ACM2 を再度設定する必要があります:ctrl+A を押し、次に Z、さらに E を押してからシリアルポート書き込みコマンドを開始します。このとき、ACM2 で任意の文字列を出力でき、同時に ACM3 で ACM2 の内容を見ることができます。 逆に、ACM3 から ACM2 に送信したい場合、ACM3 を再度設定する必要があります:ctrl+A を押し、次に Z、さらに E を押してからシリアルポート書き込みコマンドを開始します。このとき、ACM3 で任意の文字列を出力でき、同時に ACM2 で ACM3 の内容を見ることができます。図のようになります。
RS232 テスト
reComputer Industrial R20xx には 1 つの RS232 ポートが含まれており、対応する COM ポートとデバイスファイルは次のとおりです:
| RS232 ポート数 | COM ポート | シルク印刷ラベル | デバイスファイル |
|---|---|---|---|
| RS232-1 | COM1 | RX1/TX1/GND1 | /dev/ttyACM0 |
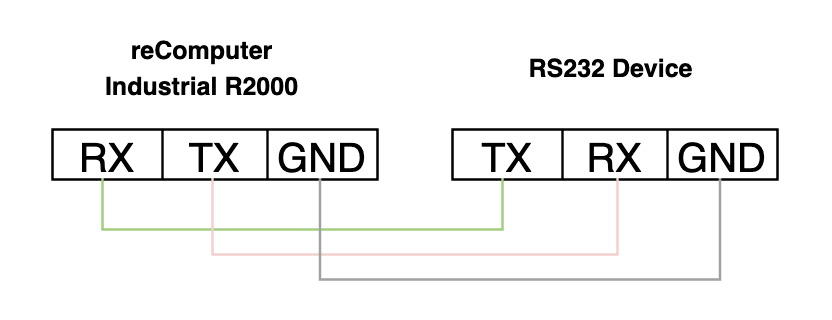
RS232 は全二重通信であるため、RS232 の TX と RX を直接短絡させてループバックテストを行います。
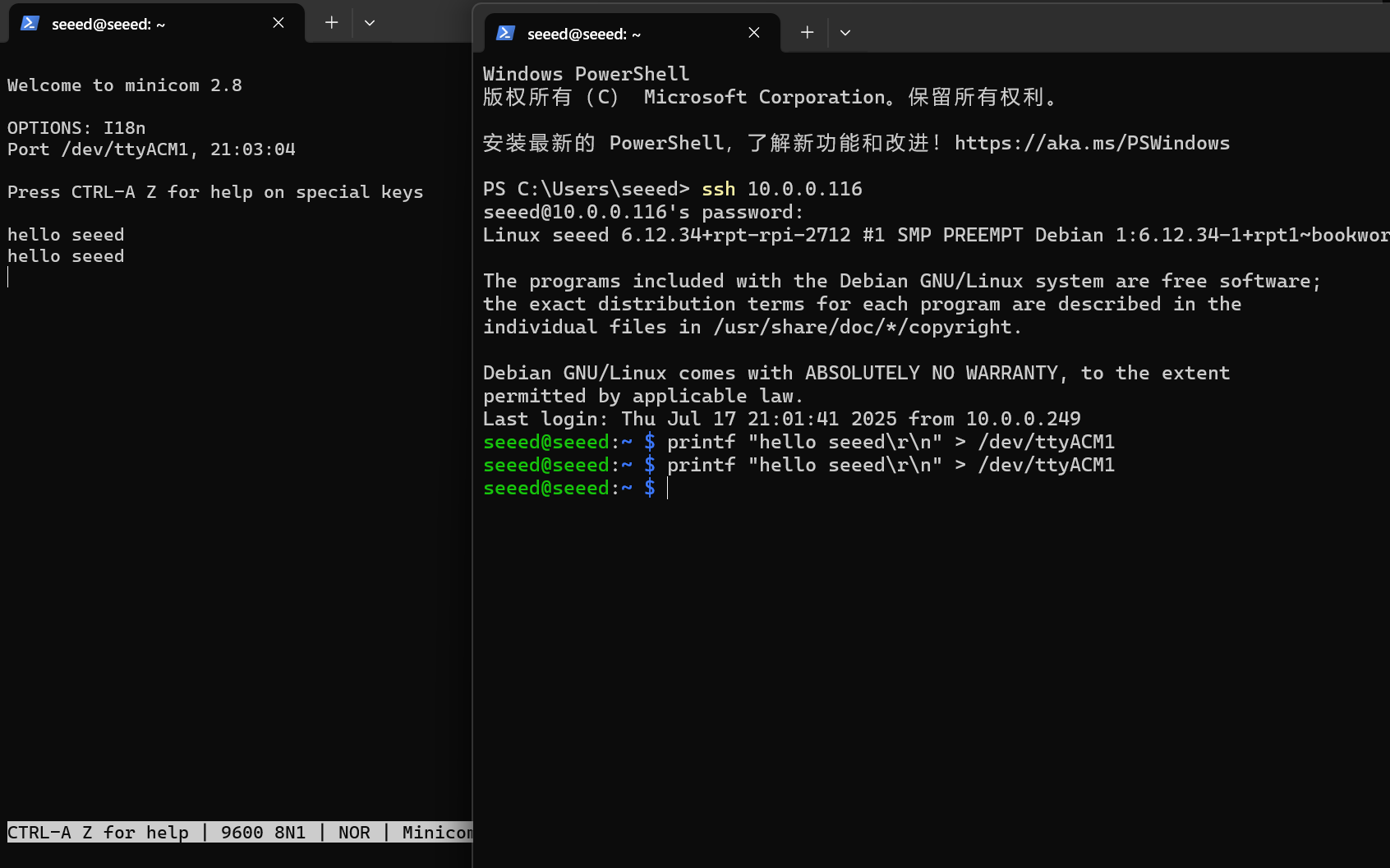
2 つのターミナルを開く必要があります。拡張ボードが接続されている場合は ACM1、拡張ボードが接続されていない場合は ACM2 を使用します: ターミナル 1:*
sudo minicom -D /dev/ttyACM1 -b 9600
拡張ボードが接続されていない場合は、/dev/ttyACM1 を /dev/ttyACM0 に変更する必要があります。
ターミナル 2:
printf "hello seeed\r\n" > /dev/ttyACM1
ターミナル 1 には、ターミナル 2 が出力するよう要求した内容が表示されます。
DI(デジタル入力)テスト
reComputer Industrial R20xx には 8 つの DI ポートがあり、ユーザーは実際のニーズに応じてこれらのポートを設定できます。
| ポート数 | DI ポート | 対応する拡張 GPIO |
|---|---|---|
| 8 | DI1 | GPIO588 |
| DI2 | GPIO589 | |
| DI3 | GPIO590 | |
| DI4 | GPIO595 | |
| DI5 | GPIO573 | |
| DI6 | GPIO574 | |
| DI7 | GPIO575 | |
| DI8 | GPIO576 |
DI ポートの入力タイプは PNP です。5VDC〜24VDC の入力電圧をサポートし、電流は 1000mA です。 DI の機能をテストするには、次の手順に従ってテストできます:
- reComputer Industrial R20xx の DI ポートと外部負荷との接続が完了していることを確認します。
- 次のコマンドを入力して GPIO の状態を取得します:
echo 588 > /sys/class/gpio/export
echo in > /sys/class/gpio/gpio588/direction
cat /sys/class/gpio/gpio588/value
- 外部レベルが High のとき、/sys/class/gpio/gpio588/value の値は 0 です。外部レベルが Low のとき、/sys/class/gpio/gpio588/value は 1 です。
DO(デジタル出力)
reComputer Industrial R20xx には 8 つの DO ポートがあり、ユーザーは実際のニーズに応じてこれらのポートを設定できます。
| ポート数 | DI ポート | 対応する拡張 GPIO |
|---|---|---|
| 8 | DO1 | GPIO638 |
| DO2 | GPIO637 | |
| DO3 | GPIO636 | |
| DO4 | GPIO635 | |
| DO5 | GPIO577 | |
| DO6 | GPIO578 | |
| DO7 | GPIO594 | |
| DO8 | GPIO596 |
DO ポートの出力タイプはトランジスタです。出力電圧は 60 VDC 未満、電流容量は 500 mA をサポートします。 DO の機能をテストするには、次の手順に従ってテストできます:
- reComputer Industrial R20xx の DO ポートと外部負荷との接続を完了させます。
- 出力を High レベルまたは Low レベルに設定するために、次のコマンドを入力します:
echo 638 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio638/direction
echo 1 > /sys/class/gpio/gpio638/value
echo 0 > /sys/class/gpio/gpio638/value
- 外部レベルが High のとき、/sys/class/gpio/gpio638/value の値は 0 です。外部レベルが Low のとき、/sys/class/gpio/gpio638/value の値は 1 です。
USB ハブのテスト
USB ハブをテストするには、次の手順を使用できます:
- lsusb コマンドを実行して、USB ハブが検出されているか確認します。このコマンドは、ハブを含む接続されているすべての USB デバイスを一覧表示します。
lsusb
このコマンドを実行すると、システムに接続されている USB デバイスに関する情報が表示され、その中に存在する USB ハブも含まれます。 USB ハブが正常に動作している場合、lsusb コマンドの出力にその詳細が表示されます。表示されない場合は、ハブまたはシステムとの接続に問題がある可能性があります。そのような場合は、USB ハブまたはその接続をトラブルシューティングする必要があります。
RTC(リアルタイムクロック)のテスト
reComputer デバイスには CM5 チップが搭載されているため、デバイス上には 2 つの RTC ユニットがあります:① CM5 の内蔵 RTC(rtc0)、② reComputer 上に実装された RTC(rtc1)です。
rtc0 は時刻データを保持できません。そのため、RTC 機能を使用するには、時刻を設定する際にデバイス番号 rtc1 を手動で指定する必要があります。
リアルタイムクロック(RTC)の機能をテストするには、次の手順に従います:
- 自動時刻同期を無効にします:
sudo systemctl stop systemd-timesyncd
sudo systemctl disable systemd-timesyncd
- 時刻を設定します: RTC に特定の日付と時刻を設定します:
sudo hwclock --set --date "2025-7-17 12:00:00" -f /dev/rtc1
- RTC 時刻をシステムに同期します システム時刻を RTC 時刻に合わせて更新します:
sudo hwclock --hctosys -f /dev/rtc1
- RTC 時刻を確認します:
sudo hwclock -r -f /dev/rtc1
このコマンドは、RTC に保存されている時刻を読み取り、表示します。
- RTC から電源を切り離し、数分待ってから再接続し、RTC 時刻が正しく保持されているかどうかを再度確認します。

RTC1 をシステムハードウェアクロックとして使用する
デフォルトの RTC デバイスは rtc0 であり、時刻同期サービスはシステム時刻をデフォルトの RTC デバイスにのみ同期します。rtc1 をプライマリのハードウェアクロックとして使用するには、起動時に rtc1 から時刻を読み取り、定期的に現在のシステム時刻を書き戻すカスタム systemd サービスを作成します。
- hctosys 用のサービスを作成する
起動時に rtc1 からシステム時刻を読み込む systemd サービスを作成します。
sudo tee /etc/systemd/system/rtc1-hctosys.service >/dev/null <<'EOF'
[Unit]
Description=Load system time from RTC1
After=dev-rtc1.device
Wants=dev-rtc1.device
[Service]
Type=oneshot
ExecStart=/sbin/hwclock --hctosys --utc -f /dev/rtc1
[Install]
WantedBy=multi-user.target
EOF
sudo systemctl daemon-reload
sudo systemctl enable rtc1-hctosys.service
- systohc 用のサービスを作成する
現在のシステム時刻を rtc1 に保存する systemd サービスと、そのサービスを定期的に実行するタイマーを作成します。
sudo tee /etc/systemd/system/rtc1-systohc.service >/dev/null <<'EOF'
[Unit]
Description=Save system time to RTC1
[Service]
Type=oneshot
ExecStart=/sbin/hwclock --systohc --utc -f /dev/rtc1
EOF
sudo tee /etc/systemd/system/rtc1-systohc.timer >/dev/null <<'EOF'
[Unit]
Description=Periodically save system time to RTC1
[Timer]
OnBootSec=2min
OnUnitActiveSec=10min
Unit=rtc1-systohc.service
[Install]
WantedBy=timers.target
EOF
sudo systemctl daemon-reload
sudo systemctl enable --now rtc1-systohc.timer
このタイマーは、起動から 2 分後に開始し、その後 10 分ごとに rtc1 を更新します。必要に応じて間隔を調整できます。
ウォッチドッグタイマーのテスト
ウォッチドッグテストを実行するには、次の手順に従います:
- ウォッチドッグソフトウェアをインストールします:
sudo apt install watchdog
- ウォッチドッグの設定ファイルを編集します:
# make sure you install vim already, if haven't, can install by the command below
sudo apt-get install vim
sudo vim /etc/watchdog.conf
設定を次のように変更します:
watchdog-device = /dev/watchdog
# Uncomment and edit this line for hardware timeout values that differ
# from the default of one minute.
watchdog-timeout = 120
# If your watchdog trips by itself when the first timeout interval
# elapses then try uncommenting the line below and changing the
# value to 'yes'.
#watchdog-refresh-use-settimeout = auto
# If you have a buggy watchdog device (e.g. some IPMI implementations)
# try uncommenting this line and setting it to 'yes'.
#watchdog-refresh-ignore-errors = no
# ====================== Other system settings ========================
#
# Interval between tests. Should be a couple of seconds shorter than
# the hardware time-out value.
interval = 15
max-load-1 = 24
#max-load-5 = 18
#max-load-15 = 12
realtime = yes
priority = 1
必要に応じて、他の設定を調整できます。
- ウォッチドッグサービスが実行中であることを確認します:
sudo systemctl start watchdog
- ウォッチドッグ機能をテストするには、次のコマンドを実行してシステムハングをシミュレートします:
sudo su
echo 1 > /proc/sys/kernel/sysrq
echo "c" > /proc/sysrq-trigger
このコマンドはカーネルクラッシュをトリガーし、ウォッチドッグによってシステムが再起動されるはずです。
- 指定したタイムアウト時間後にシステムが再起動することを確認するため、システムを監視します。 これらの手順により、システム上のウォッチドッグタイマーの機能をテストし、確認することができます。

GPIO によるブザーの制御
ブザーに対応する GPIO は gpio627 です。ブザーをオン/オフするには、次のスクリプトを入力します:
- ブザーをオンにする:
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 1 > /sys/class/gpio/gpio627/value
- ブザーをオフにする:ブザーをオフにする:
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 0 > /sys/class/gpio/gpio627/value
TPM 2.0
TPM 2.0 モジュールをデバイスに接続した場合、次のコードで TPM 接続を確認できます。
ls /dev | grep tpm
出力の解釈:
出力に tpm0 と tpmrm0 が表示される場合、TPM(Trusted Platform Module)デバイスがシステム上で検出され、利用可能であることを意味します。これは TPM ハードウェアが認識され、アクセス可能であることを示しており、良好な状態です。TPM デバイスが存在しアクセス可能であることを前提に、TPM 関連の機能やアプリケーションを使用することができます。
ATECC608A
ATECC608A デバイスとやり取りし、ランダムなシリアル番号を生成するには、次の手順に従います:
- atecc-util リポジトリをクローンします:
curl -LJO https://github.com/wirenboard/atecc-util/releases/download/v0.4.12/atecc-util_0.4.12_arm64.deb
- .deb パッケージの内容を現在のディレクトリに展開します:
dpkg -x ./atecc-util_0.4.12_arm64.deb .
- atecc ディレクトリに移動します:
cd usr/bin
- ランダムなシリアル番号を生成します:
./atecc -b 10 -s 192 -c 'serial'
このコマンドは、ATECC ユーティリティにスロット 10(-b 10)を使用し、シリアル番号サイズを 192 ビット (-s 192) に設定し、ランダムなシリアル番号 (-c 'serial') を生成するよう指示します。出力は、"01235595d3d621f0ee" のような生成されたシリアル番号になります。 このプロセスにより、ATECC608A デバイスとやり取りし、ランダムなシリアル番号の生成など、さまざまな操作を実行できます。
EEPROM とのやり取り
EEPROM(Electrically Erasable Programmable Read-Only Memory)とやり取りするためのコマンドは次のとおりです:
- EEPROM デバイスファイルに対して、読み取り・書き込み・実行のフルパーミッションを付与します:
sudo chmod 777 /sys/bus/i2c/devices/10-0050/eeprom
- 文字列 "This is a test string" を EEPROM デバイスに書き込みます:
echo "This is a test string" > /sys/bus/i2c/devices/10-0050/eeprom
- EEPROM デバイスの内容を読み取り、hexdump ユーティリティを使用して 16 進数 形式で表示します:
cat /sys/bus/i2c/devices/6-0050/eeprom | hexdump -C
SSD 検出の確認
SSD を含むディスクを一覧表示するには、fdisk -l コマンドを使用できます。方法は次のとおりです:
sudo fdisk -l
このコマンドは、システムに接続されているすべてのディスクの一覧を表示し、SSD が正しく検出されていればそれも含まれます。SSD を表すエントリを探してください。通常、/dev/sd に続いて文字(例:/dev/sda, /dev/sdb, など)が付いた形式になります。 SSD に対応するエントリを特定したら、必要に応じてパーティション作成やフォーマットを進めることができます。
安全なシャットダウンのための UPS
CPU と DC 電源入力の間の GPIO6 は、電源が落ちたときに CPU に警告を出すために使用されます。その後、CPU はスーパキャパシタのエネルギーが尽きる前にスクリプト内で緊急処理を行い、「$ shutdown」を実行する必要があります。 この機能を使用する別の方法は、GPIO ピンの変化をトリガとしてシャットダウンを開始することです。指定された GPIO ピンは、KEY_POWER イベントを生成する入力キーとして構成されます。このイベントは systemd-logind によって処理され、シャットダウンが開始されます。
- ハードウェア接続。
UPS デバイスの 'CM5_UPS_DET' ピンが R20xx デバイスの GPIO16 ピンに接続されていることを確認してください。
- 設定ファイルを変更します。
- ターミナルを開きます。
- 設定ファイルを編集するために、次のコマンドを実行します:
sudo nano /boot/firmware/config.txt
- ファイルの末尾に次の内容を追加します:
dtoverlay=gpio-shutdown,gpio_pin=GPIO16,active_low=1
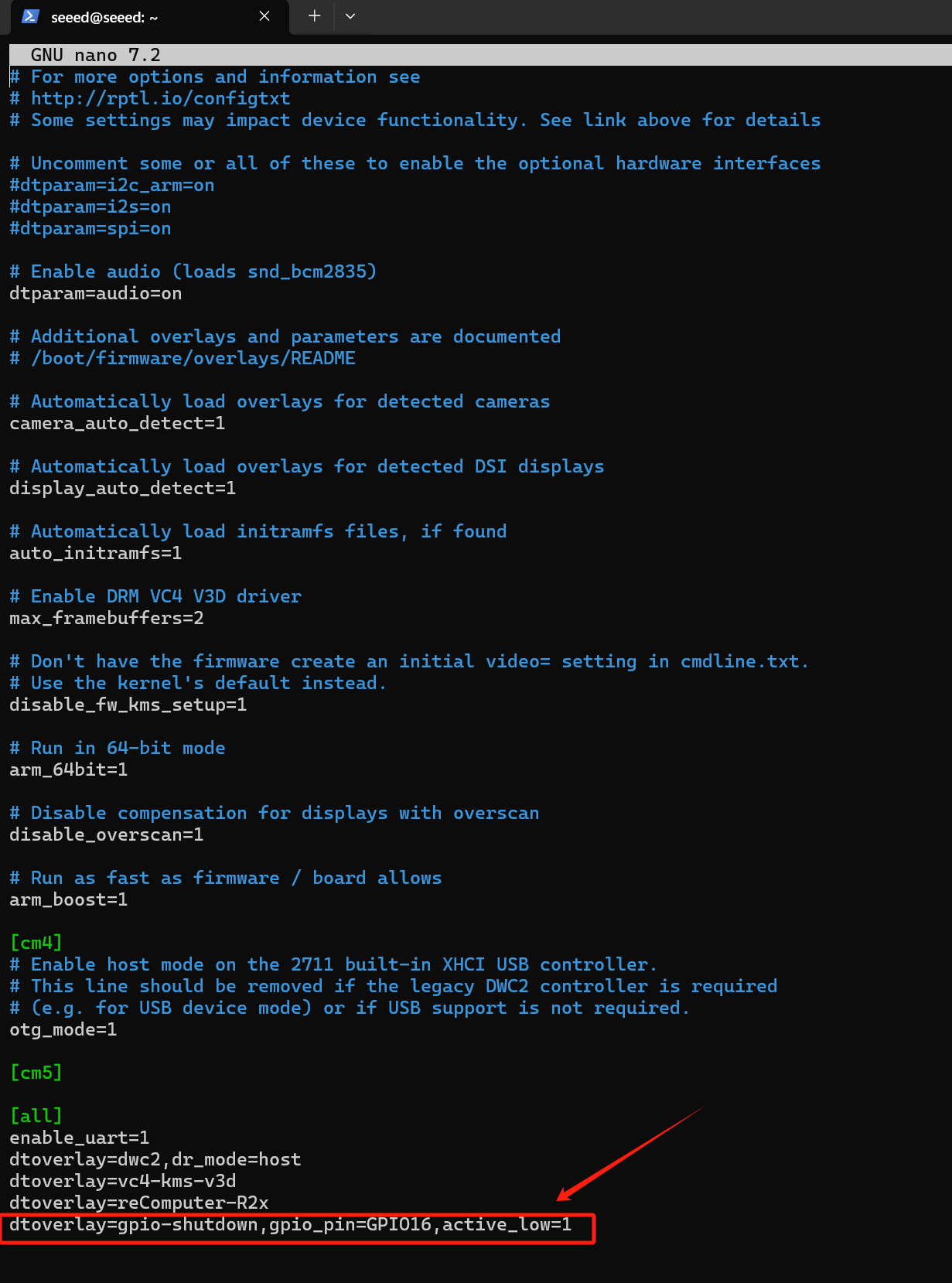
エディタを保存して終了します(Ctrl+O で保存し、Enter で確定し、Ctrl+X で終了します)。
- Python スクリプトを準備する
- 新しい Python スクリプトファイルを作成します:
cd ~
sudo nano ups_shutdown.py
- 次のコードをファイルにコピー&ペーストします:
import RPi.GPIO as GPIO
import time, os
num = 0
GPIO.setmode(GPIO.BCM)
# Set GPIO16 to input mode
# Add 500ms anti-shake time to stabilize the software
GPIO.setup(16, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(16, GPIO.FALLING, bouncetime=500)
while True:
if GPIO.event_detected(16):
print("...External power off...")
print("")
# Sync data to disk
os.system('sync')
print("...Data saving...")
print("")
# Sleep for 3 seconds
time.sleep(3)
# Synchronize data again
os.system('sync')
# Countdown 5 seconds
while num < 5:
print('----------')
s = 5 - num
print('---' + str(s) + '---')
num = num + 1
time.sleep(1)
print('----------')
# Execute shutdown command
os.system('sudo shutdown -h now')
エディタを保存して終了します(Ctrl+O で保存し、Enter で確定し、Ctrl+X で終了します)。
- スクリプトを実行します。
- ターミナルを開きます。
- スクリプトを実行するために次のコマンドを実行します:
sudo python3 ups_shutdown.py
シャットダウンコマンドを実行するためにスクリプトに十分な権限を与えるには、sudo を使用してください。
- 停電テストをシミュレートする
- 外部電源を遮断します。
- システムが自動的にデータを保存してシャットダウンするかどうかを確認します。
- 結果を確認する
- 電源を再接続します。
- システムデータが完全で、正常に起動するかどうかを確認します。
- UPS 機能については、詳細情報についてお問い合わせください。
- アラーム信号はアクティブ Low です。
AI アクセラレータ
reComputer Industrial R20xx の M.2 M-KEY 2280 スロットは、PCIE M.2 AI アクセラレータを搭載できるように設計されています。また、R20xx-12 シリーズには最大 26TOPS の Hailo-8 M.2 AI アクセラレーションがプリインストールされています。 R20xx-10 シリーズ製品を購入した場合は、AI 機能を有効にするために Hailo の NPU モジュールを購入する必要があります。 本デバイスには Hailo アクセラレータドライバがプリインストールされているため、そのまま使用してテストケースを実行できます:
- テストケースディレクトリに移動します
cd /mnt/hailo-rpi5-examples/
- 仮想環境を起動します
source ./setup_env.sh
- 簡易検出サンプルを実行します
python basic_pipelines/detection_simple.py
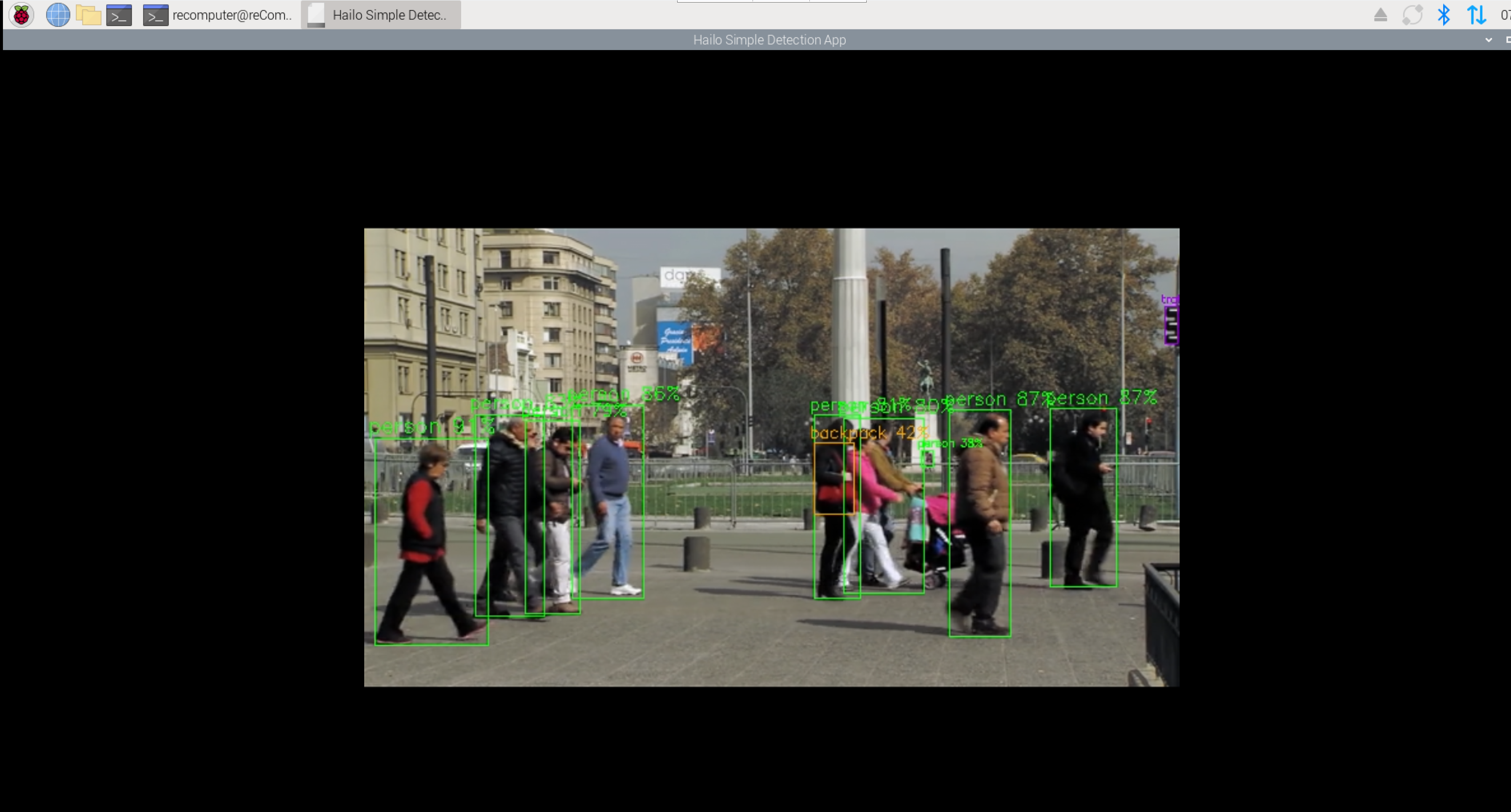
アプリケーションを終了するには、Ctrl+C を押します。
これは検出サンプルの軽量版であり、CPU 負荷を最小限に抑えつつ Hailo の性能を示すことに主眼を置いています。内部の GStreamer ビデオ処理パイプラインは、ビデオ処理タスクを最小限にすることで簡略化されており、YOLOv6 Nano モデルが使用されています。
購入した reComputer に Hailo-8 が含まれておらず、統合用に Hailo デバイスの購入を検討している場合は、公式の Hailo ドキュメント(https://github.com/hailo-ai)を参照してファームウェアと環境を構成し、サンプルを実行してデバイスが正常に使用できることを確認してください。
技術サポートと製品ディスカッション
当社製品をお選びいただきありがとうございます。私たちは、当社製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選択いただけるよう、複数のコミュニケーションチャネルを用意しています。